
Improved Generalized Cross-Validation and Unbiased Predictive Risk Estimator Methods Using the RGSVD: Application to Inversion of Potential Field Data

Abstract
:1. Introduction
2. Inversion Methodology
| Algorithm 1. Inversion of potential field data |
, , , , and .
|
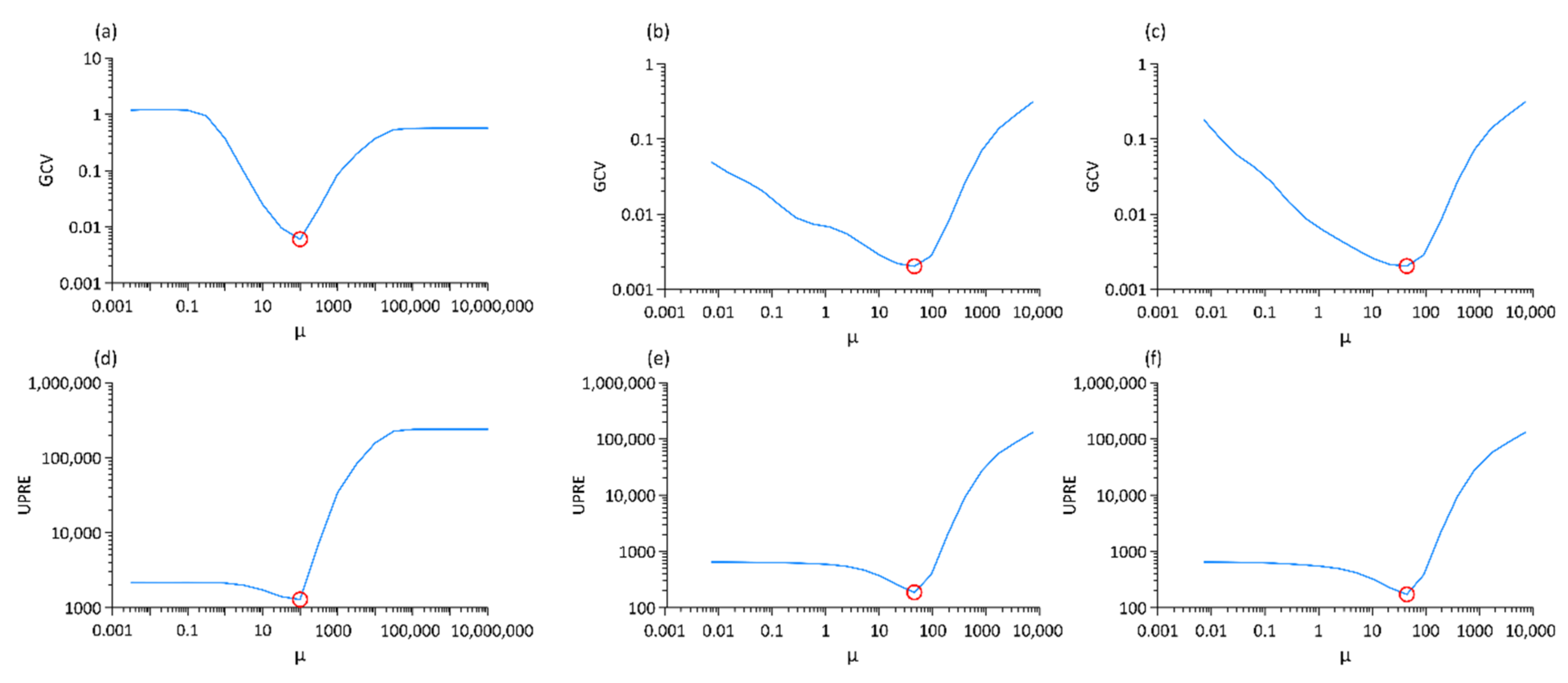
3. Estimation of Regularization Parameter
3.1. Generalized Cross-Validation Method
| Algorithm 2. Randomized generalized singular value decomposition (RGSVD) algorithm. () and , a target matrix rank q (), calculate an approximate GSVD of the matrix pair , with , , , and . |
|
3.2. Unbiased Predictive Risk Estimator Method
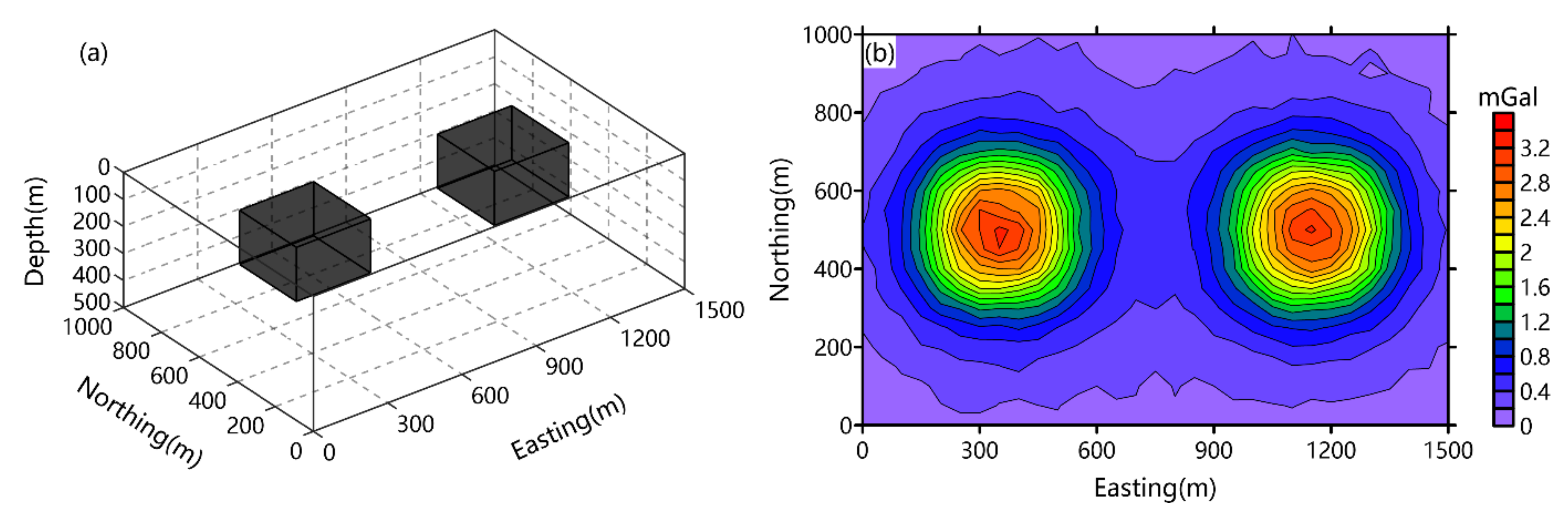
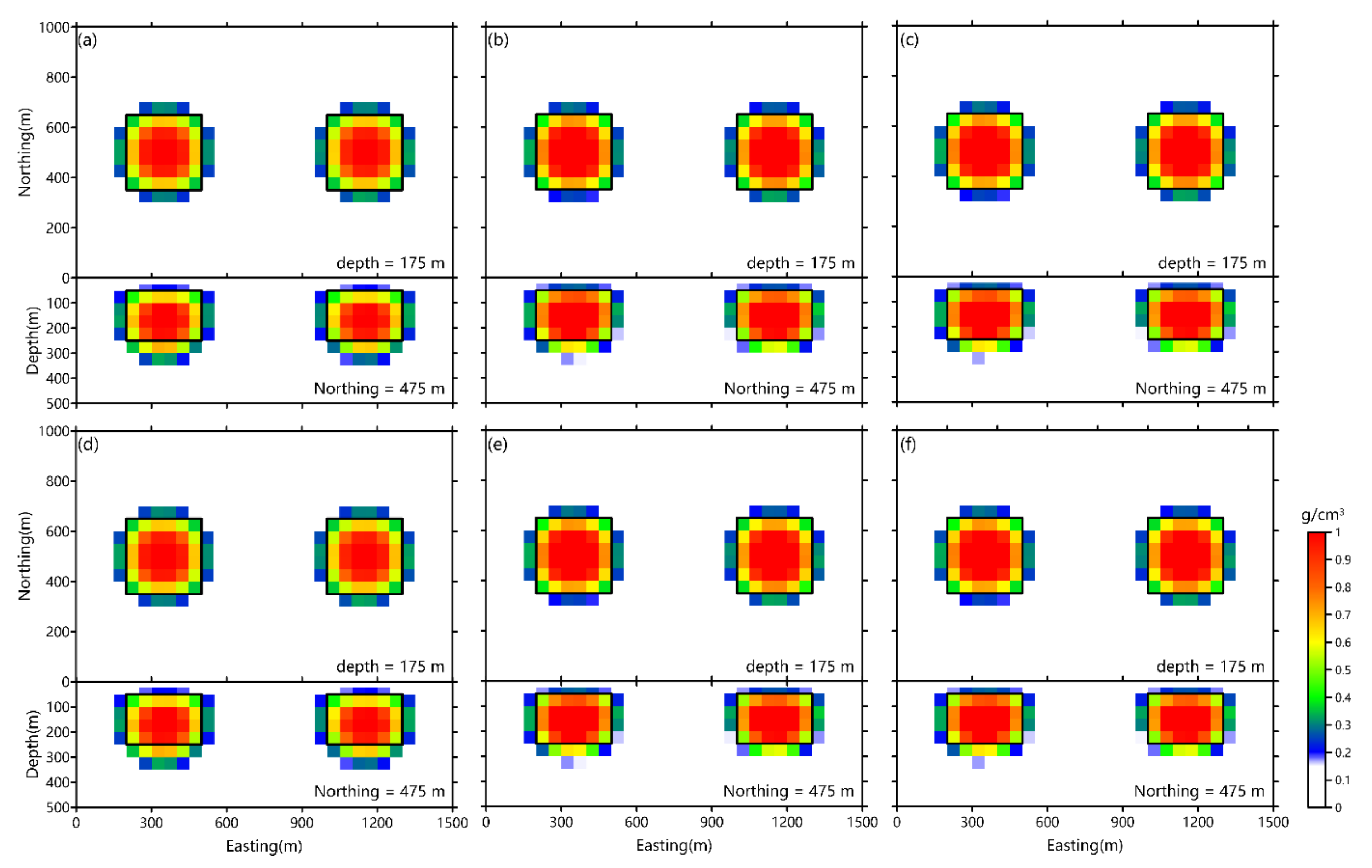
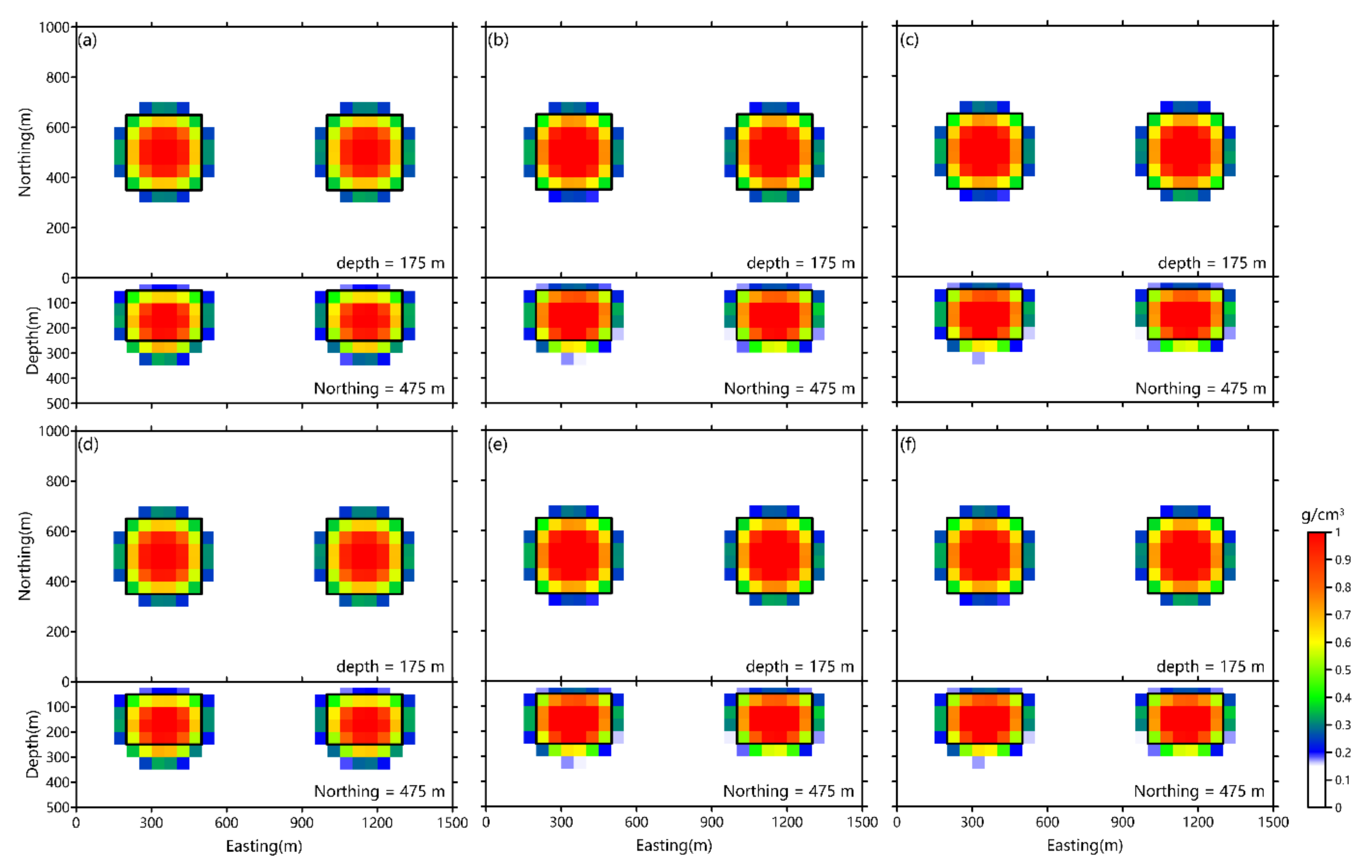
4. Synthetic Example Tests
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, J.; Lü, Q.; Chen, X.; Qi, G.; Liu, Y.; Guo, D.; Chen, Y. 3D lithologic mapping test based on 3D inversion of gravity and magnetic data: A case study in Lu-Zong ore concentration district, Anhui Province. Acta Petrol. Sin. 2014, 30, 1041–1053. [Google Scholar]
- Yan, J.; Chen, X.; Meng, G.; Lü, Q.; Deng, Z.; Qi, G.; Tang, H. Concealed faults and intrusions identification based on multi-scale edge detection and 3D inversion of gravity and magnetic data: A case study in Qiongheba area, Xinjiang, Northwest China. Interpretation 2019, 7, T331–T345. [Google Scholar] [CrossRef]
- Wang, J.; Meng, X.; Li, F. Fast Nonlinear Generalized Inversion of Gravity Data with Application to the Three-Dimensional Crustal Density Structure of Sichuan Basin, Southwest China. Pure Appl. Geophys. 2017, 174, 4101–4117. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems. Math. Comput. 1977, 32, 491. [Google Scholar]
- Vatankhah, S.; Ardestani, V.E.; Renaut, R.A. Automatic estimation of the regularization parameter in 2D focusing gravity inversion: Application of the method to the Safo manganese mine in the northwast of Iran. J. Geophys. Eng. 2014, 11, 045001. [Google Scholar] [CrossRef] [Green Version]
- Morozov, V.A. On the solution of functional equations by the method of regularization. Sov. Math. Dokl. 1966, 7, 414–417. [Google Scholar]
- Golub, G.H.; Heath, M.; Wahba, G. Generalized cross-validation as a method for choosing a good ridge regression parameter. Technometrics 1979, 21, 215–223. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Vogel, C.R. Computational Methods for Inverse Problems. In SIAM Frontiers in Applied Mathematics; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Wei, Y.; Xie, P.; Zhang, L. Tikhonov Regularization and Randomized GSVD. SIAM J. Matrix Anal. Appl. 2016, 37, 649–675. [Google Scholar] [CrossRef]
- Li, Y.; Oldenburg, D.W. 3-D inversion of magnetic data. Geophysics 1996, 61, 394–408. [Google Scholar] [CrossRef]
- Li, Y.; Oldenburg, D.W. 3-D inversion of gravity data. Geophysics 1998, 63, 109–119. [Google Scholar] [CrossRef]
- Li, Y.; Oldenburg, D.W. Fast inversion of large-scale magnetic data using wavelet transforms and a logarithmic barrier method. Geophys. J. Int. 2003, 152, 251–265. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yao, C.; Zheng, Y.; Wang, J.; Zhang, Y. 3D magnetic sparse inversion using an interior-point method. Geophysics 2018, 83, J15–J32. [Google Scholar] [CrossRef]
- Li, Z.; Yao, C. 3D sparse inversion of magnetic amplitude data when strong remanence exists. Acta Geophys. 2020, 68, 365–375. [Google Scholar] [CrossRef]
- Vatankhah, S.; Renaut, R.A.; Ardestani, V.E. Total variation regularization of the 3-D gravity inverse problem using a randomized generalized singular value decomposition. Geophys. J. Int. 2018, 213, 695–705. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
| GCV Method | UPRE Method | |||||
|---|---|---|---|---|---|---|
| CG | GSVD | RGSVD | CG | GSVD | RGSVD | |
| 100.0 | 45.3 | 44.4 | 100.0 | 45.3 | 44.4 | |
| Time | 117.5 s | 113.0 s | 1.3 s | 111.2 s | 114.3 s | 1.4 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Wang, J.; Meng, X.; Tang, H. Improved Generalized Cross-Validation and Unbiased Predictive Risk Estimator Methods Using the RGSVD: Application to Inversion of Potential Field Data. Appl. Sci. 2021, 11, 6326. https://doi.org/10.3390/app11146326
Fang Y, Wang J, Meng X, Tang H. Improved Generalized Cross-Validation and Unbiased Predictive Risk Estimator Methods Using the RGSVD: Application to Inversion of Potential Field Data. Applied Sciences. 2021; 11(14):6326. https://doi.org/10.3390/app11146326
Chicago/Turabian StyleFang, Yuan, Jun Wang, Xiaohong Meng, and Hanhan Tang. 2021. "Improved Generalized Cross-Validation and Unbiased Predictive Risk Estimator Methods Using the RGSVD: Application to Inversion of Potential Field Data" Applied Sciences 11, no. 14: 6326. https://doi.org/10.3390/app11146326
APA StyleFang, Y., Wang, J., Meng, X., & Tang, H. (2021). Improved Generalized Cross-Validation and Unbiased Predictive Risk Estimator Methods Using the RGSVD: Application to Inversion of Potential Field Data. Applied Sciences, 11(14), 6326. https://doi.org/10.3390/app11146326