
In Vivo Usability Test of Vascular Intervention Robotic System Controlled by Two Types of Master Devices



Abstract
1. Introduction
2. 7 DOFs VI Robotic System
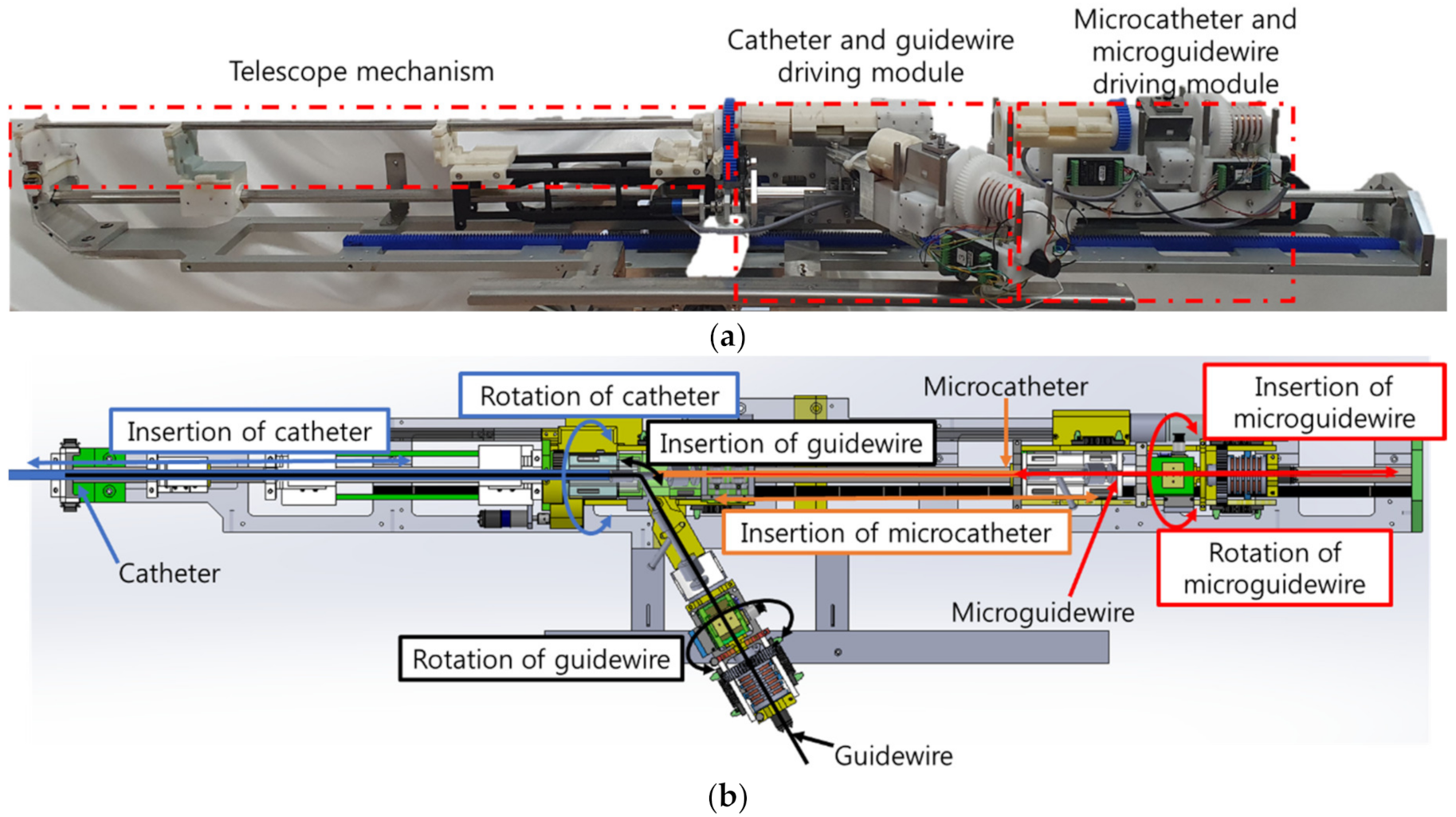
2.1. 7 DOFs VI Slave Robot
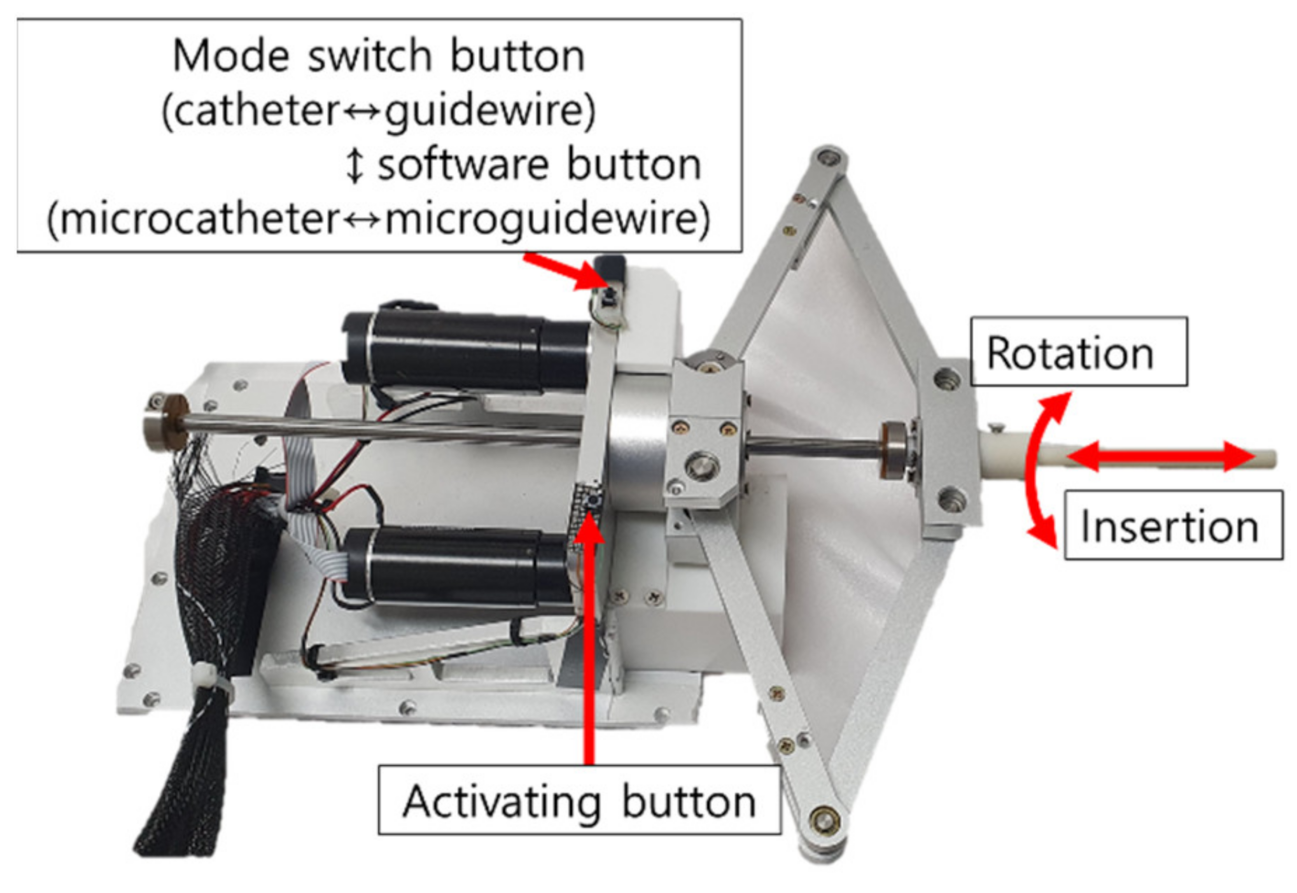
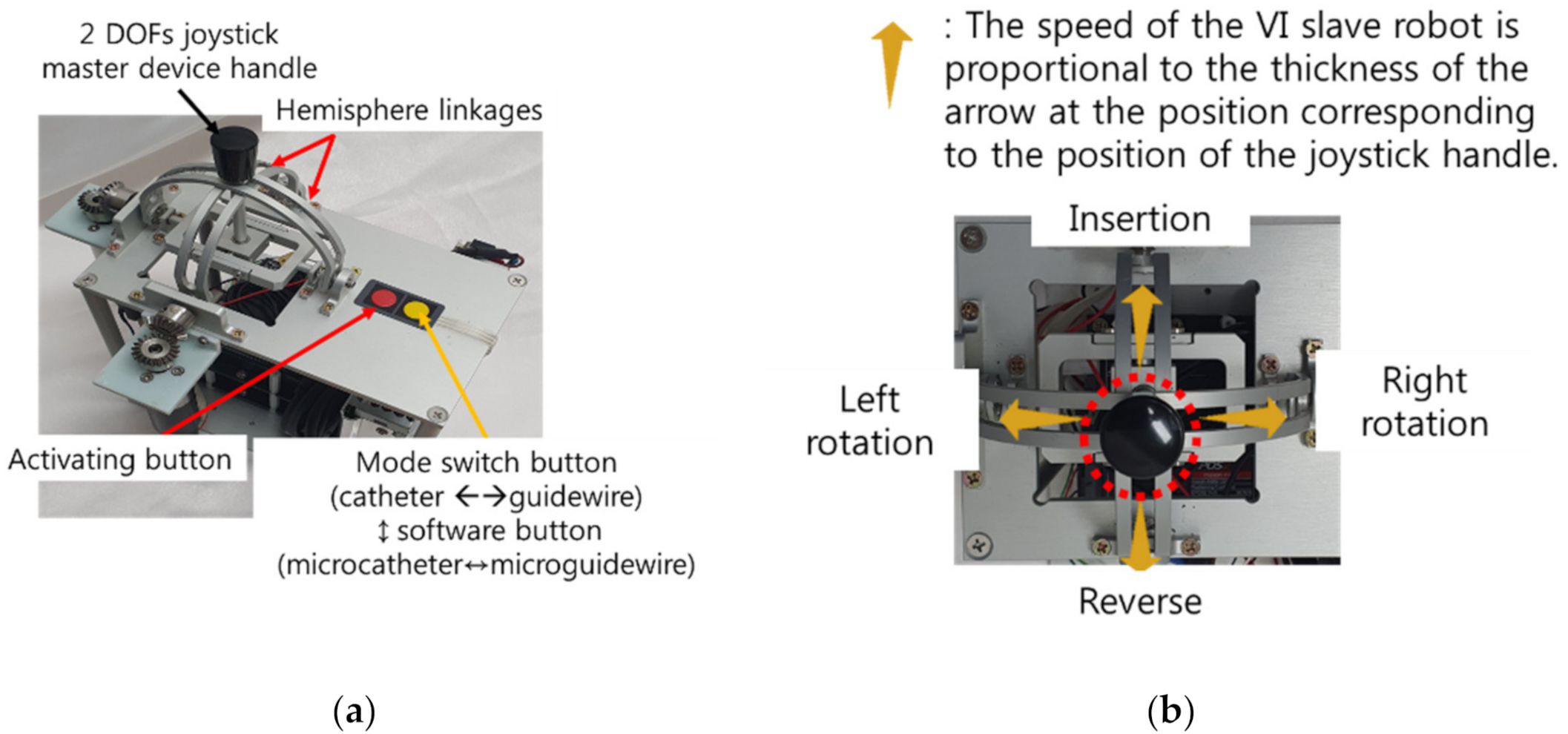
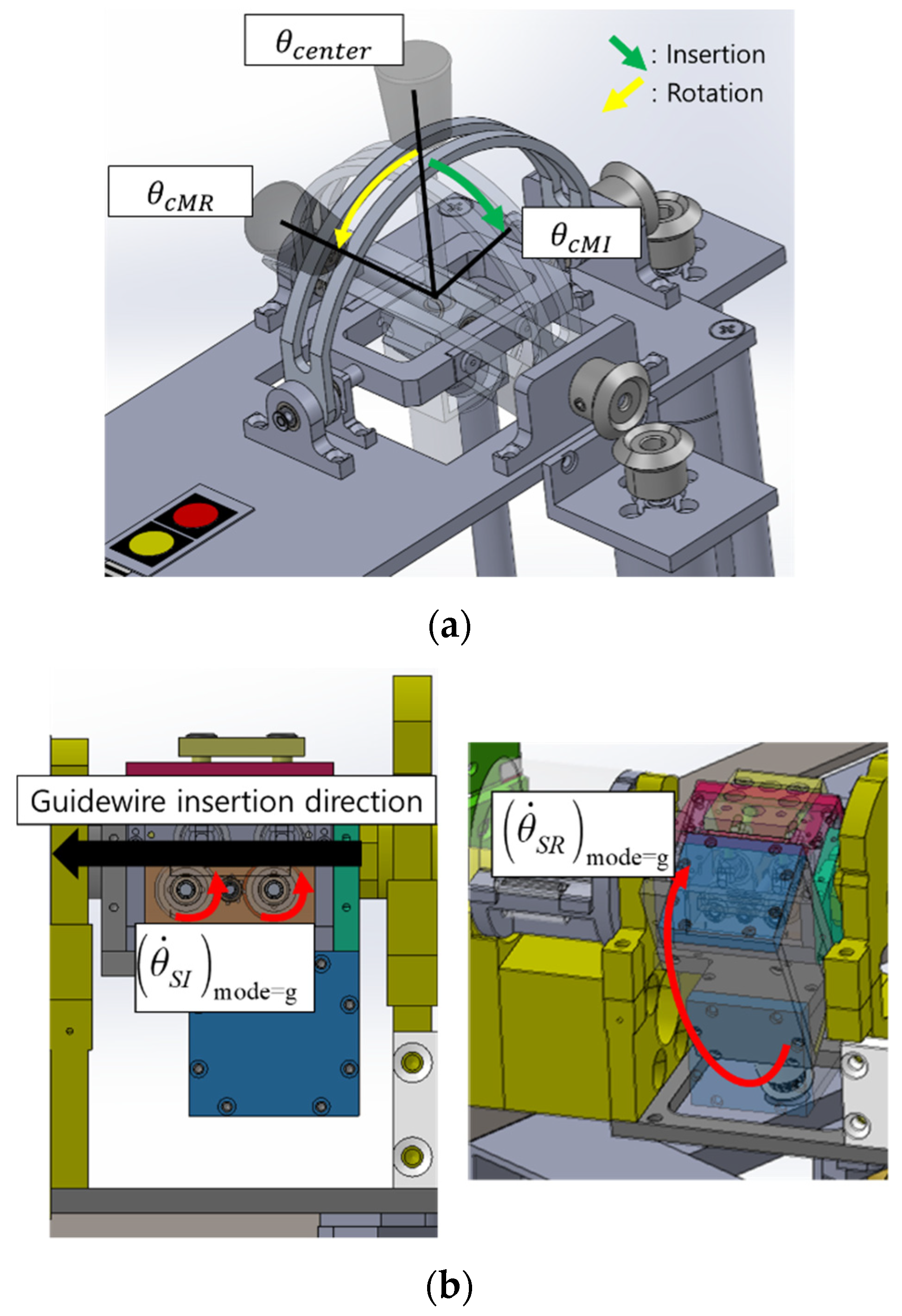
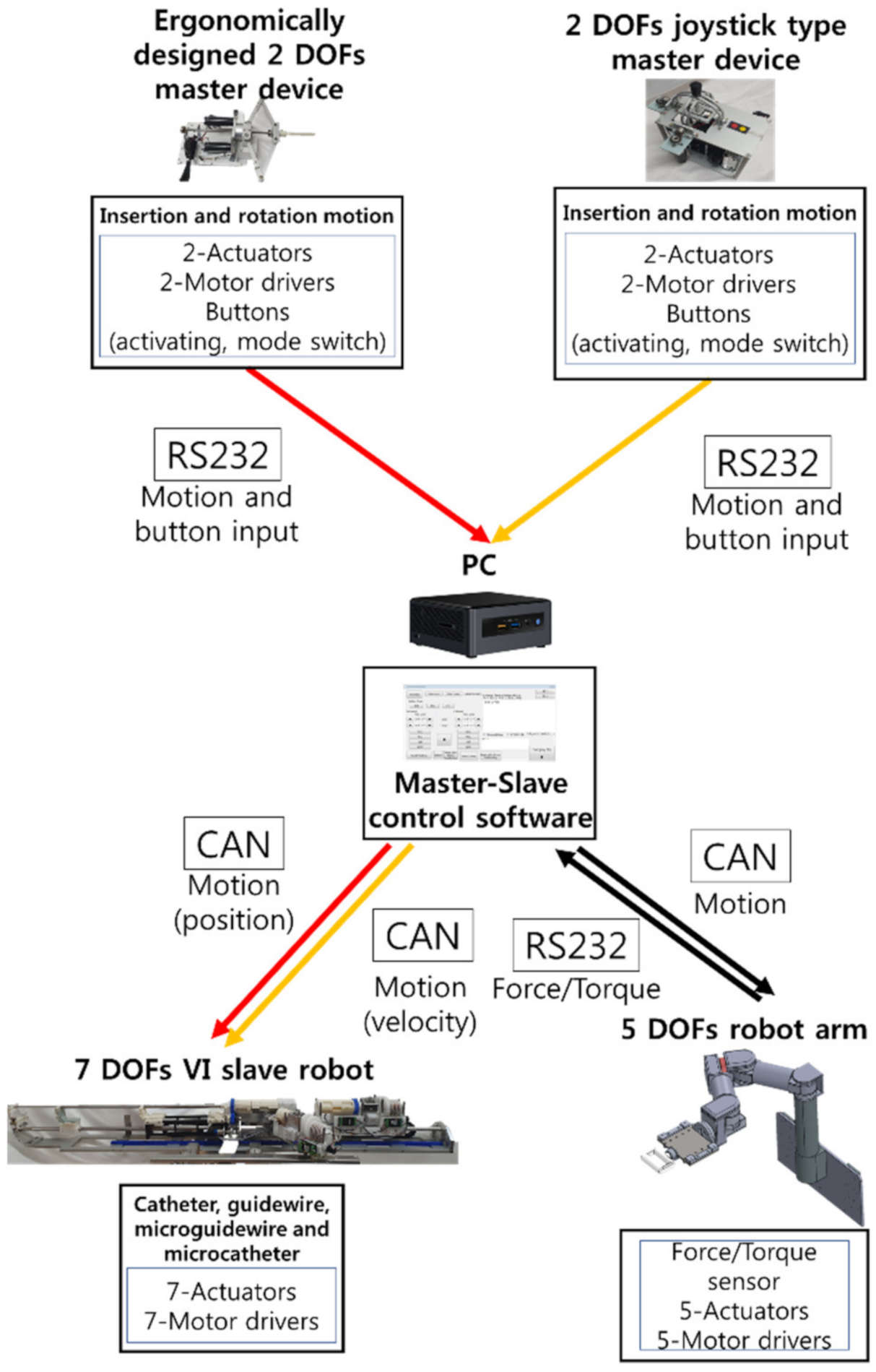
2.2. Master Devices of AI Robotic System
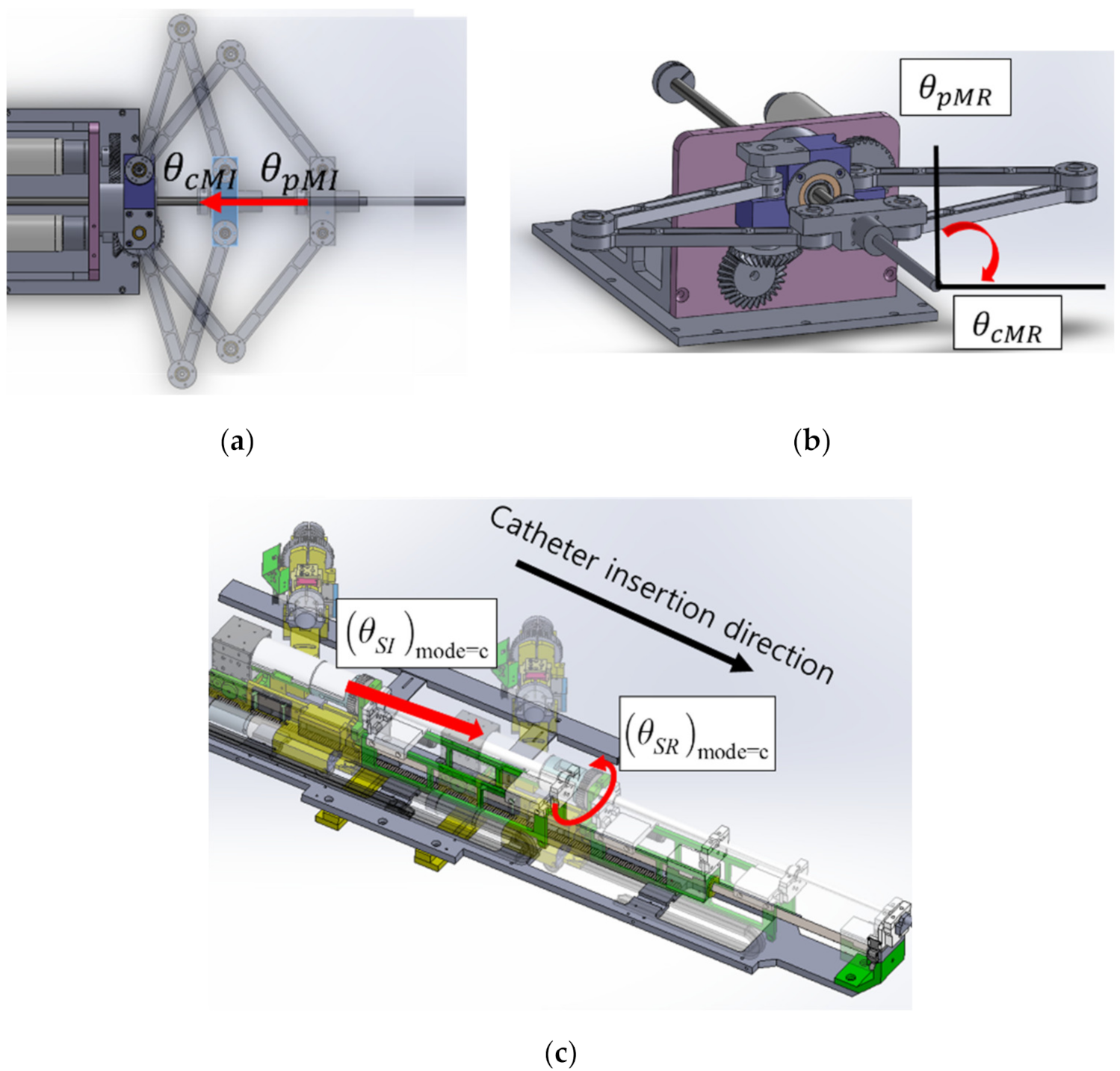
2.3. 7 DOFs VI Slave Robot Control for the Two Master Devices
3. In Vivo Experiment
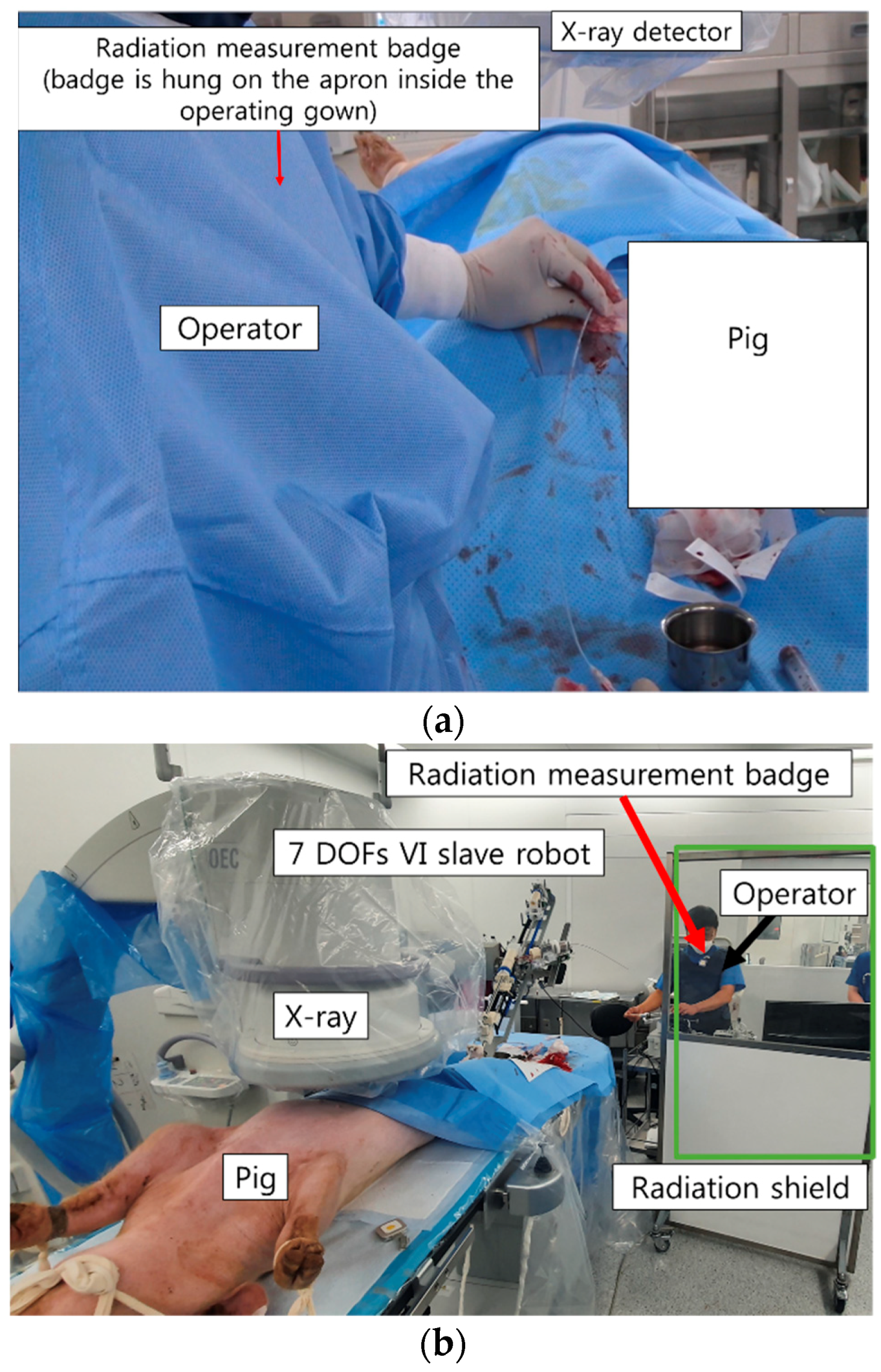
3.1. Experimental Conditions for Measurement of Radiation Exposure
3.2. Usability Tests of Two Different Master Devices for Robotic VI System
4. In Vivo Experiment Results
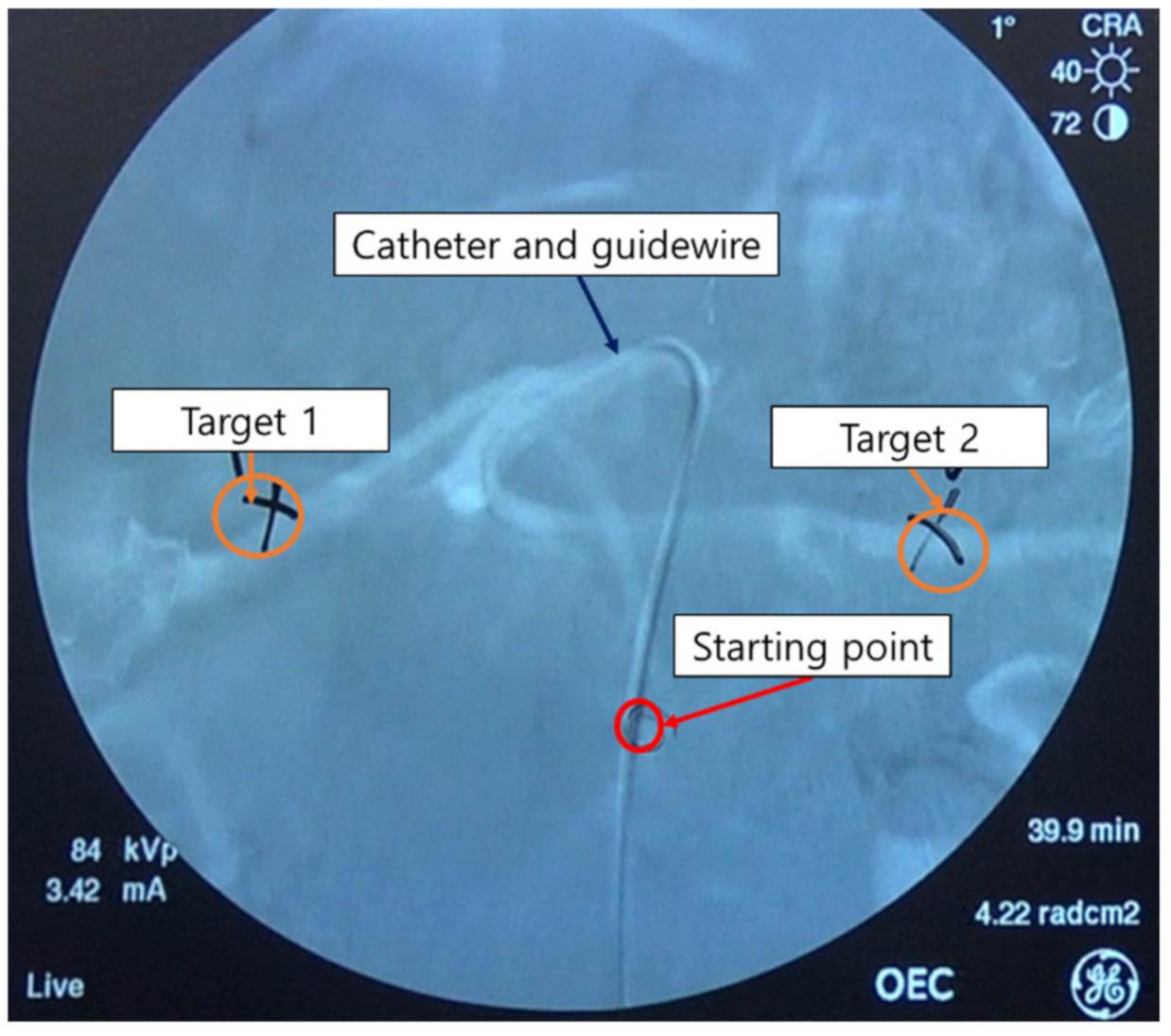
4.1. Pig Hepatic and Splenic Arteries
4.2. Pig Right Renal Artery
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Pantos, I.; Patatoukas, G.; Katritsis, D.G.; Efstathopoulos, E. Patient radiation doses in interventional cardiology procedures. Curr. Cardiol. Rev. 2009, 5, 1–11. [Google Scholar] [CrossRef]
- Efstathopoulos, E.P.; Pantos, I.; Andreou, M.; Gkatzis, A.; Carinou, E.; Koukorava, C.; Kelekis, N.L.; Brountzos, E. Occupational radiation doses to the extremities and the eyes in interventional radiology and cardiology procedures. Br. J. Radiol. 2011, 84, 70–77. [Google Scholar] [CrossRef]
- Mohapatra, A.; Greenberg, R.K.; Mastracci, T.M.; Eagleton, M.J.; Thornsberry, B. Radiation exposure to operating room personnel and patients during endovascular procedures. J. Vasc. Surg. 2013, 58, 702–709. [Google Scholar] [CrossRef] [PubMed]
- Vano, E.; González, L.; Fernandez, J.M.; Alfonso, F.; Macaya, C. Occupational radiation doses in interventional cardiology: A 15-year follow-up. Br. J. Radiol. 2006, 79, 383–388. [Google Scholar] [CrossRef]
- Goni, H.; Papadopoulou, D.; Yakoumakis, E.; Stratigis, N.; Benos, J.; Siriopoulou, V.; Makri, T.; Georgiou, E. Investigation of occupational radiation exposure during interventional cardiac catheterisations performed via radial artery. Radiat. Prot. Dosim. 2005, 117, 107–110. [Google Scholar] [CrossRef]
- Miller, D.L.; Balter, S.; Cole, P.E.; Lu, H.T.; Schueler, B.A.; Geisinger, M.; Berenstein, A.; Albert, R.; Georgia, J.D.; Noonan, P.T.; et al. Radiation doses in interventional radiology procedures: The rad-ir study part i: Overall measures of dose. J. Vasc. Interv. Radiol. 2003, 14, 711–727. [Google Scholar] [CrossRef]
- Weerakkody, R.A.; Walsh, S.R.; Cousins, C.; Goldstone, K.E.; Tang, T.Y.; Gaunt, M.E. Radiation exposure during endovascular aneurysm repair. BJS 2008, 95, 699–702. [Google Scholar] [CrossRef]
- Wrixon, A.D. New ICRP recommendations. J. Radiol. Prot. 2008, 28, 161–168. [Google Scholar] [CrossRef]
- Zhou, J.; Mei, Z.; Miao, J.; Mao, J.; Wang, L.; Wu, D.; Sun, D.; Zhao, Y. A remote-controlled robotic system with safety protection strategy based on force-sensing and bending feedback for transcatheter arterial chemoembolization. Micromachines 2020, 11, 805. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Wang, H.; Chang, J.; Niu, J.; Wang, F.; Yan, Y.; Tian, H.; Fang, J.; Lu, H. A Novel Vascular Intervention Surgical Robot Based on Force Feedback and Flexible Clamping. Appl. Sci. 2021, 11, 611. [Google Scholar] [CrossRef]
- Britz, G.W.; Panesar, S.S.; Falb, P.; Tomas, J.; Desai, V.; Lumsden, A. Neuroendovascular-specific engineering modifications to the CorPath GRX robotic system. J. Neurosurg. 2020, 133, 1830–1836. [Google Scholar] [CrossRef] [PubMed]
- Duran, C.; Lumsden, A.B.; Bismuth, J. A randomized, controlled animal trial demonstrating the feasibility and safety of the Magellan™ endovascular robotic system. Ann. Vasc. Surg. 2014, 28, 470–478. [Google Scholar] [CrossRef]
- Bassil, G.; Markowitz, S.M.; Liu, C.F.; Thomas, G.; Ip, J.E.; Lerman, B.B.; Cheung, J.W. Robotics for catheter ablation of cardiac arrhythmias: Current technologies and practical approaches. J. Cardiovasc. Electrophysiol. 2020, 31, 739–752. [Google Scholar] [CrossRef] [PubMed]
- Jeong, S.; Chitalia, Y.; Desai, J.P. Design, modeling, and control of a coaxially aligned steerable (coast) guidewire robot. IEEE Robot. Autom. Lett. 2020, 5, 4947–4954. [Google Scholar] [CrossRef]
- Granada, J.F.; Delgado, J.A.; Uribe, M.P.; Fernandez, A.; Blanco, G.; Leon, M.B.; Weisz, G. First-in-human evaluation of a novel robotic-assisted coronary angioplasty system. JACC Cardiovasc. Interv. 2011, 4, 460–465. [Google Scholar] [CrossRef]
- Riga, C.; Bicknell, C.; Cheshire, N.; Hamady, M. Initial clinical application of a robotically steerable catheter system in endovascular aneurysm repair. J. Endovasc. Ther. 2009, 16, 149–153. [Google Scholar] [CrossRef] [PubMed]
- Riga, C.V.; Bicknell, C.D.; Rolls, A.; Cheshire, N.J.; Hamady, M.S. Robot-assisted fenestrated endovascular aneurysm repair (FEVAR) using the magellan system. J. Vasc. Interv. Radiol. 2013, 24, 191–196. [Google Scholar] [CrossRef]
- Perera, A.; Riga, C.; Monzon, L.; Gibbs, R.; Bicknell, C.; Hamady, M. Robotic arch catheter placement reduces cerebral embolization during thoracic endovascular aortic repair (TEVAR). Eur. J. Vasc. Endovasc. Surg. 2017, 53, 362–369. [Google Scholar] [CrossRef]
- The Outcome of Feasibility Animal Study. Available online: https://vimeo.com/453457210 (accessed on 6 June 2021).
- Cha, H.J.; Yi, B.J.; Won, J.Y. An assembly-type master–slave catheter and guidewire driving system for vascular intervention. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2017, 231, 69–79. [Google Scholar] [CrossRef]
- Cha, H.-J.; Yoon, H.-S.; Jung, K.Y.; Yi, B.-J.; Lee, S.; Won, J.Y. A robotic system for percutaneous coronary intervention equipped with a steerable catheter and force feedback function. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1151–1156. [Google Scholar]
- Woo, J.; Song, H.S.; Cha, H.J.; Yi, B.J. Advantage of steerable catheter and haptic feedback for a 5-DOF vascular intervention robot system. Appl. Sci. 2019, 9, 4305. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (task load index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar]
- Brooke, J. SUS: A ‘quick and dirty’ usability scale. Usability Eval. Ind. 1996, 189, 189–194. [Google Scholar]
- Bangor, A.; Kortum, P.; Miller, J.A. The system usability scale (SUS): An empirical evaluation. Int. J. Hum. Comput. Interact. 2008, 24, 574–594. [Google Scholar] [CrossRef]
- Patel, T.M.; Shah, S.C.; Soni, Y.Y.; Radadiya, R.C.; Patel, G.A.; Tiwari, P.O.; Pancholy, S.B. Comparison of Robotic Percutaneous Coronary Intervention With Traditional Percutaneous Cornonary Intervention–Matched Analysis of a Large Cohort. Circ. Cardiovasc. Interv. 2020, 13, e008888. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Master Device | Usability Index | Target 1 | Target 2 |
|---|---|---|---|
| 2 DOFs ergonomically designed master device | NASA-TLX | 18.14 ± 1.95 | 22.73 ± 3.86 |
| SUS score | 74.64 ± 2.67 | 72.91 ± 2.92 | |
| 2 DOFs joystick-type master device | NASA-TLX | 23.71 ± 2.21 | 30.74 ± 4.99 |
| SUS score | 56.87 ± 4.26 | 55.62 ± 4.73 |
| MASTER DEVICE | Number of Retractions of Surgical Instruments for Target 1 | Number of Retractions of Surgical Instruments for Target 2 | Moving Distance for Target 1 [meter] | Moving Distance for Target 2 [meter] |
|---|---|---|---|---|
| 2 DOFs ergonomically designed master device | 6 | 8 | 4.16 | 4.57 |
| 2 DOFs joystick-type master device | 15 | 21 | 5.27 | 10.51 |
| Master Device | Usability Index | Target 1 | Target 2 |
|---|---|---|---|
| 2 DOFs ergonomically designed master device | NASA-TLX | 14.71 ± 1.61 | 14.57 ± 1.71 |
| SUS score | 76.45 ± 1.98 | 76.25 ± 1.76 | |
| 2 DOFs joystick-type master device | NASA-TLX | 21.28 ± 2.05 | 21.14 ± 2.03 |
| SUS score | 72.51 ± 2.04 | 72.13 ± 1.97 |
| Master Device | Number of Retractions of Surgical Instruments for Target 1 | Number of Retractions of Surgical Instruments for Target 2 | Moving Distance of Target 1 [meter] | Moving Distance of Target 2 [meter] |
|---|---|---|---|---|
| 2 DOFs ergonomically designed master device | 2 | 2 | 1.39 | 1.61 |
| 2 DOFs joystick-type master device | 5 | 4 | 2.74 | 1.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, H.-S.; Woo, J.-H.; Won, J.-Y.; Yi, B.-J. In Vivo Usability Test of Vascular Intervention Robotic System Controlled by Two Types of Master Devices. Appl. Sci. 2021, 11, 5453. https://doi.org/10.3390/app11125453
Song H-S, Woo J-H, Won J-Y, Yi B-J. In Vivo Usability Test of Vascular Intervention Robotic System Controlled by Two Types of Master Devices. Applied Sciences. 2021; 11(12):5453. https://doi.org/10.3390/app11125453
Chicago/Turabian StyleSong, Hwa-Seob, Jae-Hong Woo, Jong-Yun Won, and Byung-Ju Yi. 2021. "In Vivo Usability Test of Vascular Intervention Robotic System Controlled by Two Types of Master Devices" Applied Sciences 11, no. 12: 5453. https://doi.org/10.3390/app11125453
APA StyleSong, H.-S., Woo, J.-H., Won, J.-Y., & Yi, B.-J. (2021). In Vivo Usability Test of Vascular Intervention Robotic System Controlled by Two Types of Master Devices. Applied Sciences, 11(12), 5453. https://doi.org/10.3390/app11125453