
Costs and Benefits of Autonomous Shipping—A Literature Review


Abstract
1. Introduction
2. Materials and Methods
3. Results
3.1. Literature Overview
3.2. Basic Costs of Operating Autonomous Ships
3.2.1. Bulk Carrier
3.2.2. Container Vessel
3.3. Costs Induced Due to Various Operation Modes
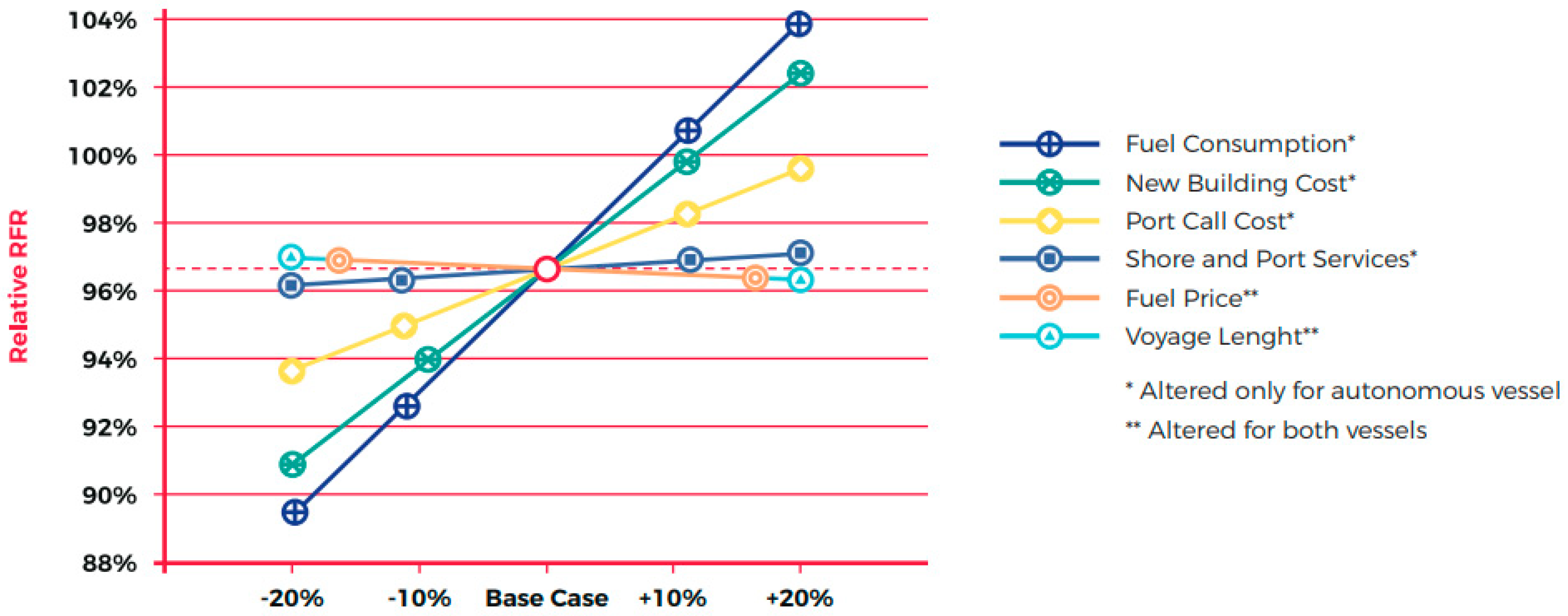
3.4. Sensitivity Analysis of a Life-Time Cost Assessment
4. Discussion
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

| Author(s) | Reference | Year |
|---|---|---|
| Burmeister, Wilko, Rødseth and Porathe | Burmeister, Hans-Christoph, Wilko C Bruhn, Ørnulf Jan Rødseth, and Thomas Porathe. 2014. “Can Unmanned Ships Improve Navigational Safety?” Transport Research Arena, 1–10. http://publications.lib.chalmers.se/records/fulltext/198207/local_198207.pdf. | 2014 |
| Banda and Kannos | Banda, O.A. Valdez, and S. Kannos. 2017. “Hazard Analysis Process for Autonomous Vessels.” 69. | 2017 |
| Kretschmann, Burmeister, and Jahn | Kretschmann, Lutz, Hans Christoph Burmeister, and Carlos Jahn. 2017. “Analyzing the Economic Benefit of Unmanned Autonomous Ships: An Exploratory Cost-Comparison between an Autonomous and a Conventional Bulk Carrier.” Research in Transportation Business and Management 25 (April): 76–86. https://doi.org/10.1016/j.rtbm.2017.06.002. | 2017 |
| Rødseth | Rødseth, Ørnulf Jan. 2017. “From Concept to Reality: Unmanned Merchant Ship Research in Norway.” 2017 IEEE OES International Symposium on Underwater Technology, UT 2017. https://doi.org/10.1109/UT.2017.7890328. | 2017 |
| Rodseth and Nordahl | Rodseth, Ornulf Jan, and Håvard Nordahl. 2017. “Definitions for Autonomous Merchant Ships”, Norwegian Forum for Unmanned Ships, Version 1.0. Norwegian Forum for Unmanned Ships, 21. http://nfas.autonomous-ship.org/resources/autonom-defs.pdf. | 2017 |
| Allal et al. | Allal, Abdelmoula Ait, Khalifa Mansouri, Mohamed Youssfi, and Mohammed Qbadou. 2018. “Toward a Review of Innovative Solutions in the Ship Design and Performance Management for Energy-Saving and Environmental Protection.” 19th IEEE Mediterranean Eletrotechnical Conference, MELECON 2018—Proceedings, 115–18. https://doi.org/10.1109/MELCON.2018.8379078. | 2018 |
| Imset, Haavardtun, and Tannum | Imset, Marius, Per Haavardtun, and Marius Tannum. 2018. “Exploring the Use of Stakeholder Analysis Methodology in the Establishment of a Living Lab.” Technology Innovation Management Review 8 (12): 26–39. https://doi.org/10.22215/timreview/1203. | 2018 |
| Kooij, Colling, and Benson | Kooij, C, A P Colling, and C L Benson. 2018. “When Will Autonomous Ships Arrive? A Technological Forecasting Perspective.” Proceedings of the International Naval Engineering Conference and Exhibition (INEC) 14. https://doi.org/10.24868/issn.2515-818x.2018.016. | 2018 |
| Santos and Guedes Soares | Santos, T. A., and C. Guedes Soares. 2018. “Economic Feasibility of an Autonomous Container Ship.” Maritime Transportation and Harvesting of Sea Resources 2: 861–70. | 2018 |
| Vervoort, Van Casteren, and Decorte | Vervoort, Marc, Ruben Van Casteren, and Colin Decorte. 2018. “Embedding Teaching-Student-Research Nexus in 2018: A Case Study in Big Data Analysis in Nautical Services.” EDULEARN18 Proceedings 1 (November): 4204–9. https://doi.org/10.21125/edulearn.2018.1062. | 2018 |
| Allianz Global Corporate | Allianz Global Corporate and Specialty. 2019. “Safety and Shipping Review 2019,” no. December 2019: 36. http://www.agcs.allianz.com/assets/PDFs/Reports/Shipping-Review-2015.pdf. | 2019 |
| Colling and Hekkenberg | Colling, Alina, and Robert Hekkenberg. 2019. Autonomous Ships—Changing Perceptions and Expectations. A Multi-Scenario Simulation Transport Model to Assess the Economics of Semi-Autonomous Platooning Concepts, 18th Conference on Computer Applications and Information Technology in the Maritime Industries. | 2019 |
| Gu et al. | Gu, Yewen, Julio Cesar Goez, Mario Guajardo, and Stein W. Wallace. 2020. “Autonomous Vessels: State of the Art and Potential Opportunities in Logistics.” International Transactions in Operational Research 00: 1–34. https://doi.org/10.1111/itor.12785. | 2019 |
| Houston Inc. | Houston Inc. 2019. “Devops in Maritime Industry Digitalization.” https://houston-inc.com/work/devops-in-maritime-industry-digitalization. | 2019 |
| James et al. | James, K. J., Vikas V. Shenoy, M. Bhasi, and C. G. Nandakumar. 2019. “Automated ICT Systems in Inland Waterways by Developing a Multi-Flow River Information Services System.” International Journal of Advanced Research in Engineering and Technology 10 (2): 389–402. https://doi.org/10.34218/IJARET.10.2.2019.038. | 2019 |
| Valdez Banda et al. | Valdez Banda, Osiris A., S. Kannos, Floris Goerlandt, Pieter H.A.J.M. van Gelder, Martin Bergström, and Pentti Kujala. 2019. “A Systemic Hazard Analysis and Management Process for the Concept Design Phase of an Autonomous Vessel.” Reliability Engineering and System Safety 191 (December 2017): 106584. https://doi.org/10.1016/j.ress.2019.106584. | 2019 |
| Vojković and Milenković 2019 | Vojković, Goran, and Melita Milenković. 2019. “Autonomous Ships and Legal Authorities of the Ship Master.” Case Studies on Transport Policy, no. September 2018: 0–1. https://doi.org/10.1016/j.cstp.2019.12.001. | 2019 |
| Akbar et al. | Akbar, Abeera, Anna K A Aasen, Mohamed Msakni, Kjetil Fagerholt, Elizabeth Lindstad, and Frank Meisel. 2020. “An Economic Analysis of Introducing Autonomous Ships in a Short-Sea Liner Shipping Network” 00: 1–25. https://doi.org/10.1111/itor.12788. | 2020 |
| Msakni et al. | Msakni, Mohamed Kais, Abeera Akbar, Anna K. A. Aasen, Kjetil Fagerholt, Frank Meisel, and Elizabeth Lindstad. 2020. “Can Autonomous Ships Help Short-Sea Shipping Become More Cost-Efficient?” In, 389–95. https://doi.org/10.1007/978-3-030-48439-2_47. | 2020 |
References
- (International Maritime Organisation MSC (MSC 99/WP.9). Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); International Maritime Organisation: London, UK, 2018; pp. 1–5. [Google Scholar]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A Framework to Identify Factors Influencing Navigational Risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020. [Google Scholar] [CrossRef]
- Chae, C.J.; Kim, M.; Kim, H. A Study on Identification of Development Status of MASS Technologies and Directions of Improvement. Appl. Sci. 2020, 10, 4564. [Google Scholar] [CrossRef]
- Li, S.; Fung, K.S. Maritime Autonomous Surface Ships (MASS): Implementation and Legal Issues. Marit. Bus. Rev. 2019, 4, 330–339. [Google Scholar] [CrossRef]
- Vojković, G.; Milenković, M. Autonomous Ships and Legal Authorities of the Ship Master. Case Stud. Transp. Policy 2020, 8, 333–340. [Google Scholar] [CrossRef]
- Kooij, C.; Colling, A.P.; Benson, C.L. When Will Autonomous Ships Arrive? A Technological Forecasting Perspective. In Proceedings of the International Naval Engineering Conference and Exhibition (INEC), Glasgow, UK, 2–4 October 2018. [Google Scholar] [CrossRef]
- Rodseth, J.O.; Nordahl, H. Definitions for Autonomous Merchant Ships, Norwegian Forum for Unmanned Ships, Version 1.0. Nor. Forum Unmanned Ships 2017, 21. Available online: http://nfas.autonomous-ship.org/resources/autonom-defs.pdf (accessed on 22 November 2020).
- Gil, M.; Wróbel, K.; Montewka, J.; Goerlandt, F. A Bibliometric Analysis and Systematic Review of Shipboard Decision Sup-port Systems for Accident Prevention. Saf. Sci. 2020, 128, 104717. [Google Scholar] [CrossRef]
- Rødseth, Ø.J. From Concept to Reality: Unmanned Merchant Ship Research in Norway. In Proceedings of the 2017 IEEE OES International Symposium on Underwater Technology, Busan, Korea, 21–24 February 2017. [Google Scholar] [CrossRef]
- Munim, H.Z.; Dushenko, M.; Jimenez, V.J.; Shakil, M.H.; Imset, M. Big Data and Artificial Intelligence in the Maritime In-dustry: A Bibliometric Review and Future Research Directions. Marit. Policy Manag. 2020. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing Ship Risk Model Applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Chaal, M.; Banda, O.A.V.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. A Framework to Model the STPA Hierarchical Control Structure of an Autonomous Ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Imset, M.; Haavardtun, P.; Tannum, M. Exploring the Use of Stakeholder Analysis Methodology in the Establishment of a Living Lab. Technol. Innov. Manag. Rev. 2018, 8, 26–39. [Google Scholar] [CrossRef]
- Etges, A.P.; Souza, J.S.; Kliemann Neto, F.J. Risk Management for Companies Focused on Innovation Processes. Production 2017. [Google Scholar] [CrossRef]
- Haider, J.; Ou, Z.; Pettit, S. Predicting Corporate Failure for Listed Shipping Companies. Marit. Econ. Logist. 2019, 21, 415–438. [Google Scholar] [CrossRef]
- Porathe, T. A Navigating Navigator Onboard or a Monitoring Operator Ashore? Towards Safe, Effective, and Sustainable Maritime Transportation: Findings from Five Recent EU Projects. Transp. Res. Procedia 2016, 14, 233–242. [Google Scholar] [CrossRef]
- DNV GL. Position Paper-Remote-Controlled and Autonomous Ships; DNV GL: Berrum, Norway, 2018. [Google Scholar]
- Autonomous Ship Project, Key Facts about YARA Birkeland-Kongsberg Maritime. 2017. Available online: https://www.kongsberg.com/maritime/support/themes/autonomous-ship-project-key-facts-about-yara-birkeland/ (accessed on 15 May 2020).
- Yara Birkeland Press Kit | Yara International. 2020. Available online: https://www.yara.com/news-and-media/press-kits/yara-birkeland-press-kit/ (accessed on 22 November 2020).
- Rolls-Royce. Autonomous Ships: The next Step; AAWA Position Pap. Roll. Royce Plc.: London, UK, 2016; Volume 7. [Google Scholar]
- Kretschmann, L.; Burmeister, H.C.; Jahn, C. Analyzing the Economic Benefit of Unmanned Autonomous Ships: An Explora-tory Cost-Comparison between an Autonomous and a Conventional Bulk Carrier. Res. Transp. Bus. Manag. 2017. [Google Scholar] [CrossRef]
- Bhalodi, A. Transportation Management Research Paper. 2019.
- Akbar, A.; Aasen, A.K.; Msakni, M.; Fagerholt, K.; Lindstad, E.; Meisel, F. An Economic Analysis of Introducing Autonomous Ships in a Short-Sea Liner Shipping Network. Int. Trans. Oper. Res. 2020, 28, 1740–1764. [Google Scholar] [CrossRef]
- Goerlandt, F. Maritime Autonomous Surface Ships from a Risk Governance Perspective: Interpretation and Implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Li, X.K.; Cullinane, K. An Economic Approach to Maritime Risk Management and Safety Regulation. Marit. Econ. Logist. 2003, 5, 268–284. [Google Scholar] [CrossRef]
- Gou, X.; Lam, J.S.L. Risk Analysis of Marine Cargoes and Major Port Disruptions. Marit. Econ. Logist. 2019, 21, 497–523. [Google Scholar] [CrossRef]
- Kiiski, T.; Solakivi, T.; Töyli, J.; Ojala, L. Long-Term Dynamics of Shipping and Icebreaker Capacity along the Northern Sea Route. Marit. Econ. Logist. 2018, 20, 375–399. [Google Scholar] [CrossRef]
- Acanfora, M.; Krata, P.; Montewka, J.; Kujala, P. Towards a Method for Detecting Large Roll Motions Suitable for Oceango-ing Ships. Appl. Ocean Res. 2018, 79, 49–61. [Google Scholar] [CrossRef]
- Acanfora, M.; Montewka, J.; Hinz, T.; Matusiak, J. Towards Realistic Estimation of Ship Excessive Motions in Heavy Weath-er. A Case Study of a Containership in the Pacific Ocean. Ocean Eng. 2017, 138, 140–150. [Google Scholar] [CrossRef]
- Wróbel, K.; Gil, M.; Chae, C.J. On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels. Appl. Sci. 2021, 11, 1145. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship-Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Zhang, M.; Montewka, J.; Manderbacka, T.; Kujala, P.; Hirdaris, S. A Big Data Analytics Method for Evaluation of Ship-Ship Collision Risk Reflecting Real Operational Conditions. Reliab. Eng. Syst. Saf. 2021, 213, 107674. [Google Scholar] [CrossRef]
- Burmeister, H.C.; Bruhn, W.C.; jan Rødseth, Ø.; Porathe, T. Can Unmanned Ships Improve Navigational Safety? Transp. Res. Arena. 2014. Available online: http://publications.lib.chalmers.se/records/fulltext/198207/local_198207.pdf (accessed on 24 November 2020).
- Banda, O.A.V.; Kannos, S. Hazard Analysis Process for Autonomous Vessels. 2017. Available online: https://www.aboamare.fi/_media_25402_/R&D%20kuvat/%C3%83%E2%80%9ElyVESI/Tulokset%20201805/Hazard-Analysis-Process-for-Autonomous-Vessels.pdf (accessed on 24 November 2020).
- Allianz Global Corporate and Specialty. Safety and Shipping Review 2019. 2019. Available online: http://www.agcs.allianz.com/assets/PDFs/Reports/Shipping-Review-2015.pdf (accessed on 24 November 2020).
- Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.; Bergström, M.; Kujala, P. A Systemic Hazard Analysis and Man-agement Process for the Concept Design Phase of an Autonomous Vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- James, K.J.; Shenoy, V.V.; Bhasi, M.; Nandakumar, C.G. Automated ICT Systems in Inland Waterways by Developing a Multiflow River Information Services System. Int. J. Adv. Res. Eng. Technol. 2019, 10, 389–402. [Google Scholar] [CrossRef]
- Gu, Y.; Goez, J.C.; Guajardo, M.; Wallace, S.W. Autonomous Vessels: State of the Art and Potential Opportunities in Logistics. Int. Trans. Oper. Res. 2020. [Google Scholar] [CrossRef]
- Msakni, K.M.; Akbar, A.; Aasen, A.K.A.; Fagerholt, K.; Meisel, F.; Lindstad, E. Can Autonomous Ships Help Short-Sea Ship-ping Become More Cost-Efficient? Oper. Res. Proc. 2020. [Google Scholar] [CrossRef]
- Colling, A.P.; Hekkenberg, R.G. A Multi-Scenario Simulation Transport Model to Assess the Economics of Semi-Autonomous Platooning Concepts. In Proceedings of the 18th Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT 2019), Tullamore, Ireland, 25–27 March 2019; pp. 132–145. [Google Scholar]
- Santos, T.A.; Guedes Soares, C. Economic Feasibility of an Autonomous Container Ship. Marit. Transp. Harvest. Sea Resour. 2018, 2, 861–870. [Google Scholar]
- Rodseth, O.J.; Kvamstad, B.; Porathe, T.; Burmeister, H.C. Communication Architecture for an Unmanned Merchant Ship. In Proceedings of the OCEANS 2013 MTS/IEEE Bergen: The Challenges of the Northern Dimension, Bergen, Norway, 10–14 June 2013. [Google Scholar] [CrossRef]
- Kretschmann, L.; Rødseth, Ø.J.; Fuller, B.S.; Noble, H.; Horahan, J.; McDowell, H. D9.3: Quantitative Assessment. Marit. Unmanned Navig. Intell. Netw. 2015, 12–20. [Google Scholar]
- ABS. Ship Energy Efficiency Measures -Status and Guidance. 2012. Available online: https://www.eagle.org/eagleExternalPortalWEB/ShowProperty/BEA/Repository/References/Capability/Brochures/ShipEnergyEfficiency (accessed on 15 May 2020).
- Priftis, A.; Boulougouris, E.; Turan, O.; Papanikolaou, A. Parametric Design and Multi-Objective Optimisation of Container-ships. Ocean Eng. 2018, 156, 347–357. [Google Scholar] [CrossRef]
- A Commercial Reality Check for Autonomous Shipping in 2018 | Seatrade Maritime. 2018. Available online: https://www.seatrade-maritime.com/asia/commercial-reality-check-autonomous-shipping-2018 (accessed on 22 November 2020).
- Autonomous Ships-Redefining the Industry? General Insurance-Marine. 2016. Available online: https://www.asiainsurancereview.com/Magazine/ReadMagazineArticle?aid=38465 (accessed on 24 November 2020).
- Levander, O. Ship Intelligence—A New Era. Smart Ship Technol. 2016, 25–32. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the Assessment of Potential Impact of Unmanned Vessels on Maritime Trans-portation Safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Hogg, T.; Ghosh, S. Autonomous Merchant Vessels: Examination of Factors That Impact the Effective Implementation of Unmanned Ships. Aust. J. Marit. Ocean Aff. 2016, 8, 206–222. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Martio, J. Integrated Satellite-Terrestrial Connectivity for Autonomous Ships: Survey and Future Research Directions. Remote Sens. 2020, 12, 2507. [Google Scholar] [CrossRef]
- Kobyliński, L. Smart Ships–Autonomous or Remote Controlled? Zesz. Nauk. Akad. Mor. W Szczec. 2018, 53, 28–34. [Google Scholar] [CrossRef]
- Ottesen, A.E. Situation Awareness in Remote Operation of Autonomous Ships Shore Control Center Guidelines; Department of Product Design, Norwegian University of Science and Technology: Trondheim, Norway, 2015; pp. 1–12. [Google Scholar]
- Christiansen, M.; Hellsten, E.; Pisinger, D.; Sacramento, D.; Vilhelmsen, C. Liner Shipping Network Design. Eur. J. Oper. Res. 2020, 286, 1–20. [Google Scholar] [CrossRef]
- Meersman, H.; Moschouli, E.; Sys, C.; van de Voorde, E.; Vanelslander, T.; van Hassel, E.; Friedhoff, B.; Hoyer, K.; Tenzer, M.; Hekkenberg, R. Identifying Cost Performance Indicators for a Logistics Model for Vessel Trains. In Maritime Supply Chains; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Munim, Z.H. Autonomous Ships: A Review, Innovative Applications and Future Maritime Business Models. Supply Chain Forum 2019, 20, 266–279. [Google Scholar] [CrossRef]
- Colling, A.; Hekkenberg, R. Autonomous Ships–Changing Perceptions and Expectations; 2019. [Google Scholar]
- Žižlavský, O. Net Present Value Approach: Method for Economic Assessment of Innovation Projects. Procedia Soc. Behav. Sci. 2014, 156, 506–512. [Google Scholar] [CrossRef]
- vom Saal, R.J.; Mizine, I.; Deschamps, L.C.; Thorpe, R.W. Dual-Use Short Sea Shipping Trimaran Trailership HSTT-180. Mar. Technol. SNAME News 2005, 42, 132–143. [Google Scholar] [CrossRef]
- Watson, D.G.M. Practical Ship Design. In Elsevier Ocean Engineering Book Series; Elsevier Science Ltd.: Oxford, UK, 1997. [Google Scholar]
- Psaraftis, H.N. Decarbonization of Maritime Transport: To Be or Not to Be? Marit. Econ. Logist. 2019, 21, 353–371. [Google Scholar] [CrossRef]
- Awoyomi, A.; Patchigolla, K.; Anthony, E.J. CO2/SO2 Emission Reduction in CO2 Shipping Infrastructure. Int. J. Greenh. Gas Control 2019, 88, 57–70. [Google Scholar] [CrossRef]
- Allal, A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Toward a Review of Innovative Solutions in the Ship Design and Perfor-mance Management for Energy-Saving and Environmental Protection. Mediterr. Eletrotechnical Conf. 2018. [Google Scholar] [CrossRef]
- Tam, K.; Jones, K. Cyber-Risk Assessment for Autonomous Ships. In Proceedings of the 2018 International Conference on Cyber Security and Protection of Digital Services, Cyber Security 2018, Abu Dhabi, UAE, 2 April 2018. [Google Scholar] [CrossRef]
- Kim, M.; Joung, T.; Jeong, B.; Park, H. Autonomous Shipping and Its Impact on Regulations, Technologies, and Industries. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Furuichi, M.; Shibasaki, R. Cascade Strategy of Container Terminals to Maximize Their Quantitative and Qualitative Capacity. In Proceedings of the IAME 2015 Conference, Kuala Lumpur, Malaysia, 23–27 August 2015. [Google Scholar]
- Vervoort, M.; Van Casteren, R.; Decorte, C. Embedding Teaching-Student-Research Nexus in 2018: A Case Study in Big Data Analysis in Nautical Services. Edulearn Proc. 2018, 1, 4204–4209. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}

| Degree of Autonomy | Description | |
|---|---|---|
| 1. | Ship with automated processes and decision support | Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated. |
| 2. | Remotely controlled ship with seafarers on board | The ship is controlled and operated from another location, but seafarers are on board. |
| 3. | Remotely controlled ship without seafarers on board | The ship is controlled and operated from another location. There are no seafarers on board. |
| 4. | Fully autonomous ship | The operating system of the ship is able to make decisions and determine actions by itself. |
| Year | Number of Papers | Type |
|---|---|---|
| 2014 | 1 | JA |
| 2015 | 0 | - |
| 2016 | 0 | - |
| 2017 | 4 | 2 technical reports 2 JA |
| 2018 | 5 | 4 CA 1 JA |
| 2019 | 7 | 1 CA, 4 JA 2 discussion papers |
| 2020 | 2 | 1 CA 1 JA |
| Total | 19 | |
| Author(s) | Year | Type of Article | Objective | Method |
|---|---|---|---|---|
| Kretschmann, Burmeister, and Jahn | 2017 | JA | Presenting operating, voyage, and capital costs for conventional and autonomous bulk carrier | Comparison between conventional and autonomous ship |
| Santos and Guedes Soares | 2018 | CA | Assessment of costs for autonomous short sea container ship | Case study |
| Gu et al. | 2019 | Discussion Paper | Short literature analysis on selected aspects of autonomous shipping in economic terms | Literature review |
| Colling and Hekkenberg | 2019 | CA | Cost modelling of vessel train concept with the use of an autonomous Lead Vessel (LV) | Case study |
| Akbar et al. | 2020 | JA | Short sea liner shipping network—the concept of vessel train—estimation of routes and vessel sizes (both autonomous and conventional) with the aspect of an autonomous container vessel in international traffic | Case study |
| Msakni et al. | 2020 | CA | Introduction of autonomous ships to a liner shipping network design problem. Economic considerations on a single mother route and daughter routes serving small ports. | Case study |
| DNV GL ReVolt (2013) | YARA Birkeland (2017) | Autonomous Short Sea Container Ship | |
|---|---|---|---|
| Length | 60 m | 80 m | 119.80 m |
| Width | - | 15 m | 20.0 m |
| Capacity | 100 TEU 1 | 120 TEU 1 | 600 TEU 1 |
| Service speed | 6 knots | Eco speed: 6–7 knots, max: 13 knots | 16 knots |
| Range | 100 nautical miles | - | 1937 nautical miles |
| Ship power supply | Battery (capacity of 3 MWh) | Battery (capacity of 7 MWh) | Generators |
| Cost Type | Includes | Savings/Additional Costs per Year per Vessel |
|---|---|---|
| Operating costs | ||
| Crew cost | Wages and related costs | −USD 945,000 |
| Cost for general stores | e.g., medical, cabin, safety equipment, maintenance of e.g., life rafts and spares for the hotel system | −USD 67,000 |
| Shore control centre | Overall personal costs | +USD 116,000 |
| Investment costs (mUSD 2.1) Operating costs per year per 90 ships (USD 875,000) | +USD 33,055 | |
| Maintenance crews in ports | Maintaining the propulsion plant, auxiliary plants, supply systems, electrical and autonomous systems, etc. | +USD 135,000 |
| Voyage costs | ||
| Fuel costs | Fuel consumption | −6% (12–15% according to (Hogg and Ghosh, 2016)) |
| Fuel consumption | Air resistance | −1% |
| Fuel consumption | Light ship weight | −2.6% |
| Fuel consumption | Removed hotel system | −33% |
| Boarding crew for port calls | Port call costs | +20% (approximately USD 20,000 per call) |
| Boarding crew | Unscheduled assistance | Not estimated |
| Capital costs | ||
| Deckhouse and hotel system | Removal of hotel, accommodation system, and deckhouse | −5% (hotel and accommodation) −approx. 1–10% (deckhouse) |
| Autonomous ship technology and redundant technical systems | Specific autonomous ship technology (e.g., Autonomous Navigation System), Redundancies (e.g., communication, electrical systems, propulsion) | +10% |
| Operating Costs | Voyage Costs | Capital Costs |
|---|---|---|
| Crew wages (−) 1 | Air resistance (−) | Deckhouse (−) |
| Crew related costs (−) | Light ship weight (−) | Hotel system (−) |
| Shore Control Centre (+) | Hotel system (−) | Redundant technical systems (+) |
| Maintenance crews (+) | Boarding crew for port calls (+) | Autonomous ship technology (+) |
| Scenario | Description | Summary of the Analysis |
|---|---|---|
| Scenario A | Reduced crew | Expected Present Value of the autonomous ship is 0.5 m USD lower than EPV of the conventional reference vessel |
| Scenario B | Reduced crew and increased fuel efficiency | Expected Present Value of the autonomous ship is 4.3 m USD lower than EPV of the conventional reference vessel |
| Scenario C | Reduced crew, increased fuel efficiency, and high-grade fuel | Expected Present Value of the autonomous ship is 19.2 m USD higher than EPV of the conventional reference vessel |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ziajka-Poznańska, E.; Montewka, J. Costs and Benefits of Autonomous Shipping—A Literature Review. Appl. Sci. 2021, 11, 4553. https://doi.org/10.3390/app11104553
Ziajka-Poznańska E, Montewka J. Costs and Benefits of Autonomous Shipping—A Literature Review. Applied Sciences. 2021; 11(10):4553. https://doi.org/10.3390/app11104553
Chicago/Turabian StyleZiajka-Poznańska, Ewelina, and Jakub Montewka. 2021. "Costs and Benefits of Autonomous Shipping—A Literature Review" Applied Sciences 11, no. 10: 4553. https://doi.org/10.3390/app11104553
APA StyleZiajka-Poznańska, E., & Montewka, J. (2021). Costs and Benefits of Autonomous Shipping—A Literature Review. Applied Sciences, 11(10), 4553. https://doi.org/10.3390/app11104553