Bayesian Filtering Multi-Baseline Phase Unwrapping Method Based on a Two-Stage Programming Approach

 ,
,  ,
,
Abstract
Featured Application
Abstract
1. Introduction
2. MBPU Theory and Phase Gradient Estimation
2.1. Mathematical Foundation of MBPU
2.2. Phase Gradient Estimation
3. Bayesian Filtering MBPU Method
3.1. Multi-Baseline EKFPU Algorithm
3.2. Multi-Baseline CKFPU Algorithm
3.3. Multi-Baseline UIFPU Algorithm
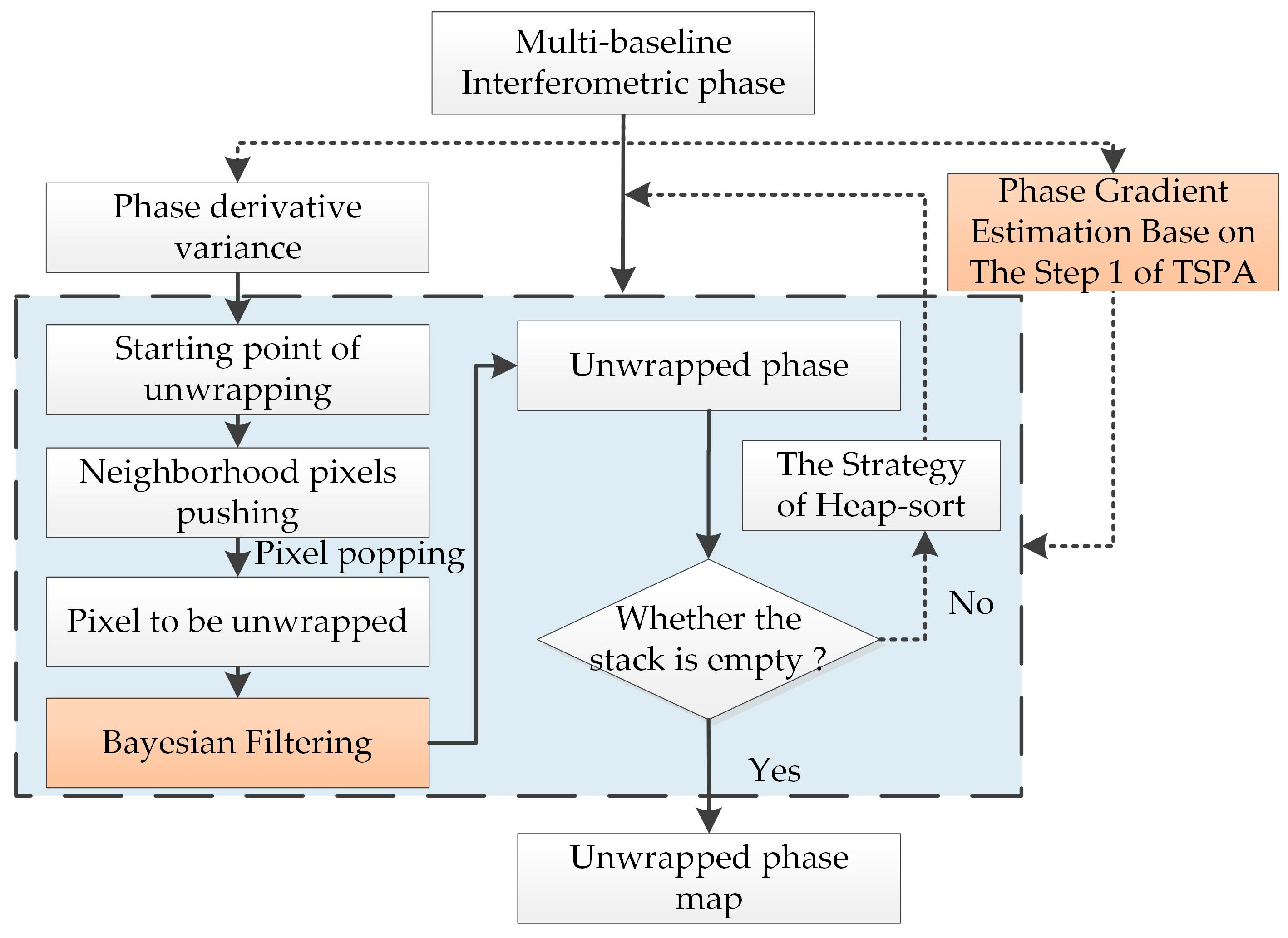
3.4. Framework of TSPA-Based Bayesian Filtering MBPU
4. Results and Discussion
4.1. Experiment 1
4.2. Experiment 2
4.3. Experiment 3
4.4. Experiment 4
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ferraiuolo, G.; Federica, M.; Pascazio, V.; Schirinzi, G. DEM Reconstruction Accuracy in Multichannel SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2009, 47, 191–201. [Google Scholar] [CrossRef]
- Ghiglia, D.C.; Wahl, D.E. Interferometric Synthetic Aperture Radar Terrain Elevation Mapping from Multiple Observations. In Proceedings of the IEEE 6th Digital Signal Processing Workshop, Albuquerque, NM, USA, 2–5 October 1994; pp. 33–36. [Google Scholar] [CrossRef]
- Baselice, F.; Ferraioli, G.; Pascazio, V.; Schirinzi, G. Contextual information-based multichannel synthetic aperture radar interferometry: Addressing DEM reconstruction using contextual information. IEEE Signal Process. Mag. 2014, 31, 59–68. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, S.; Li, T.; Guo, L.; Chen, Q.; Li, S. A novel two-step noise reduction approach for interferometric phase images. Opt. Lasers Eng. 2019, 121, 1–10. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Yuan, Z.; Xu, J.; Lee, H. A Review on Phase Unwrapping in In SAR Signal Processing. IEEE Geosci. Remote Sens. Mag. 2019, 15, 1887–1891. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Xu, J.; An, D.; Lee, H. Large-Scale L0-Norm and L1-Norm 2-D Phase Unwrapping. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4712–4728. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Bao, Z. Residues Cluster-Based Segmentation and Outlier-Detection Method for Large-Scale Phase Unwrapping. IEEE Trans. Image Process. 2011, 20, 2865–2875. [Google Scholar] [CrossRef]
- Xu, J.; An, D.; Huang, X.; Wang, G. Phase Unwrapping for Large-Scale P-Band UWB SAR Interferometry. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2120–2124. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Lee, H.; Cao, N. 2-D phase unwrapping using minimum infinity-norm. IEEE Geosci. Remote Sens. Lett. 2018, 7, 40–58. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Bao, Z. A Cluster-Analysis-Based Efficient Multibaseline Phase-Unwrapping Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 478–487. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F.; Guarnieri, A.M. Multibaseline SAR interferometry for automatic DEM reconstruction (DEM). In Proceedings of the 3rd ERS Symposium on Space at the Service of Our Environment, Florence, Italy, 17–21 March 1997; pp. 1809–1820. [Google Scholar]
- Yu, H.; Lan, Y. Robust Two-Dimensional Phase Unwrapping for Multibaseline SAR Interferograms A Two-Stage Programming Approach. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5217–5225. [Google Scholar] [CrossRef]
- Thompson, D.G.; Robertson, A.E.; Arnold, D.V.; Long, D.G. Multi-baseline interferometric SAR for iterative height estimation. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999; pp. 251–253. [Google Scholar] [CrossRef]
- Xu, W.; Chang, E.; Kwoh, L.; Lim, H.; Cheng, W. Phase-unwrappingof SAR interferogram with multi-frequency or multi-baseline. In Proceedings of the IGARSS ’94—1994 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 8–12 August 1994; pp. 730–732. [Google Scholar] [CrossRef]
- Fornaro, G.; Monti Guarnieri, A.; Pauciullo, A.; De-Zan, F. Maximum likelihood multi-baseline SAR interferometry. IET Radar Sonar Navig. 2006, 153, 279. [Google Scholar] [CrossRef]
- Ferraiuolo, G.; Pascazio, V.; Schirinzi, G. Maximum a posteriori estimation of height profiles in InSAR imaging. IEEE Geosci.Remote Sens. Lett. 2004, 1, 66–70. [Google Scholar] [CrossRef]
- Hong, F.; Tang, J.; Lu, P. Multichannel DEM reconstruction method based on Markov random fields for bistatic SAR. Sci. China Inform. Sci. 2015, 58, 1–14. [Google Scholar] [CrossRef][Green Version]
- Chirico, D.; Schirinzi, G. Multichannel interferometric SAR phase unwrapping using extended Kalman Smoother. Int. J. Microw. Wirel. Tech. 2013, 5, 429–436. [Google Scholar] [CrossRef]
- Dong, Y.; Jiang, H.; Zhang, L.; Liao, M. An Efficient Maximum Likelihood Estimation Approach of Multi-Baseline SAR Interferometry for Refined Topographic Mapping in Mountainous Areas. Remote Sens. 2018, 10, 454. [Google Scholar] [CrossRef]
- Li, X.; Xia, X. A Fast Robust Chinese Remainder Theorem Based Phase Unwrapping Algorithm. IEEE Signal Process. Lett. 2008, 15, 665–668. [Google Scholar] [CrossRef]
- Yuan, Z.; Deng, Y.; Li, F.; Wang, R.; Liu, G.; Han, X. Multichannel InSAR DEM reconstruction through improved closed-form robust Chinese remainder theorem. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1314–1318. [Google Scholar] [CrossRef]
- Liu, H.; Xing, M.; Bao, Z. A Cluster-Analysis-Based Noise-Robust Phase-Unwrapping Algorithm for Multibaseline Interferograms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 494–504. [Google Scholar] [CrossRef]
- Jin, B.; Guo, J.; Wei, P.; Su, B.; He, D. Multi-baseline InSAR phase unwrapping method based on mixed-integer optimisation model. IET Radar Sonar Navig. 2018, 12, 694–701. [Google Scholar] [CrossRef]
- Lan, Y.; Yu, H.; Xing, M. Refined Two-Stage Programming-Based Multi-Baseline Phase Unwrapping Approach Using Local Plane Model. Remote Sens. 2019, 11, 491. [Google Scholar] [CrossRef]
- Kim, M.G.; Griffiths, H.D. Phase unwrapping of multibaseline interferometry using Kalman filtering. In Proceedings of the 7th International Conference on Image Processing and its Applications, London, UK, 13–15 July 1999; pp. 251–253. [Google Scholar] [CrossRef]
- Nies, H.; Loffeld, O.; Wang, R. Phase unwrapping using 2D-Kalman filter—Potential and limitations. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 1213–1216. [Google Scholar] [CrossRef]
- Martinez-Espla, J.J.; Martinez-Marin, T.; Lopez-Sanchez, J.M. An Optimized Algorithm for InSAR Phase Unwrapping Based on Particle Filtering, Matrix Pencil, and Region-Growing Techniques. IEEE Geosci. Remote Sens. Lett. 2009, 6, 835–839. [Google Scholar] [CrossRef]
- Liu, W.; Bian, Z.; Liu, Z.; Zhang, Q. Evaluation of a Cubature Kalman Filtering-Based Phase Unwrapping Method for Differential Interferograms with High Noise in Coal Mining Areas. Sensors 2015, 15, 16336–16357. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Zeng, Q. Multi-baseline extended particle filtering phase unwrapping algorithm based on amended matrix pencil model and quantized path-following strategy. J. Syst. Eng. Electron. 2019, 30, 78–84. [Google Scholar] [CrossRef]
- Gao, Y.; Zhang, S.; Li, T.; Chen, Q.; Zhang, X.; Li, S. Refined Two-Stage Programming Approach of Phase Unwrapping for Multi-Baseline SAR Interferograms Using the Unscented Kalman Filter. Remote Sens. 2019, 11, 199. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit Altitude | Incidence Angle | Wavelength |
|---|---|---|
| 600 km | 30° | 0.24 m |
| Interferogram | Figure 3d | Figure 3e |
| Normal Baseline | 389.20 m | 112.10 m |
| Mean Correlation Coefficient | 0.95 | 0.95 |
| PU Method | Long Baseline | Short Baseline | ||
|---|---|---|---|---|
| Figure | RMSE | Figure | RMSE | |
| TSPA | Figure 3j | 3.2803 | Figure 3r | 0.5734 |
| TSPAEKF | Figure 3k | 1.6736 | Figure 3s | 0.4576 |
| TSPACKF | Figure 3l | 1.6856 | Figure 3t | 0.4489 |
| TSPAUIF | Figure 3m | 1.6530 | Figure 3u | 0.4442 |
| PU Method | Long Baseline | Short Baseline | ||
|---|---|---|---|---|
| Figure | RMSE | Figure | RMSE | |
| TSPA | Figure 4j | 2.5464 | Figure 4r | 1.7760 |
| TSPAEKF | Figure 4k | 0.2865 | Figure 4s | 0.2354 |
| TSPACKF | Figure 4l | 0.3731 | Figure 4t | 0.2795 |
| TSPAUIF | Figure 4m | 0.2929 | Figure 4u | 0.2408 |
| Orbit Altitude | Incidence Angle | Wavelength |
|---|---|---|
| 514.8 km | 36.60° | 0.0320 m |
| Interferogram | Figure 5b | Figure 5c |
| Normal Baseline | −370.46 m | −127.79 m |
| Image Size | 3040 × 2315 pixels | 3040 × 2315 pixels |
| PU Method | Long Baseline | Short Baseline |
|---|---|---|
| RMSE | RMSE | |
| TSPA | 3.73 | 3.25 |
| TSPAEKF | 3.08 | 3.04 |
| TSPACKF | 3.10 | 3.10 |
| TSPAUIF | 3.05 | 3.04 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Tang, X.; Li, T.; Chen, Q.; Zhang, X.; Li, S.; Lu, J. Bayesian Filtering Multi-Baseline Phase Unwrapping Method Based on a Two-Stage Programming Approach. Appl. Sci. 2020, 10, 3139. https://doi.org/10.3390/app10093139
Gao Y, Tang X, Li T, Chen Q, Zhang X, Li S, Lu J. Bayesian Filtering Multi-Baseline Phase Unwrapping Method Based on a Two-Stage Programming Approach. Applied Sciences. 2020; 10(9):3139. https://doi.org/10.3390/app10093139
Chicago/Turabian StyleGao, YanDong, XinMing Tang, Tao Li, QianFu Chen, Xiang Zhang, ShiJin Li, and Jing Lu. 2020. "Bayesian Filtering Multi-Baseline Phase Unwrapping Method Based on a Two-Stage Programming Approach" Applied Sciences 10, no. 9: 3139. https://doi.org/10.3390/app10093139
APA StyleGao, Y., Tang, X., Li, T., Chen, Q., Zhang, X., Li, S., & Lu, J. (2020). Bayesian Filtering Multi-Baseline Phase Unwrapping Method Based on a Two-Stage Programming Approach. Applied Sciences, 10(9), 3139. https://doi.org/10.3390/app10093139