DC Microgrid System Modeling and Simulation Based on a Specific Algorithm for Grid-Connected and Islanded Modes with Real-Time Demand-Side Management Optimization




Abstract
1. Introduction
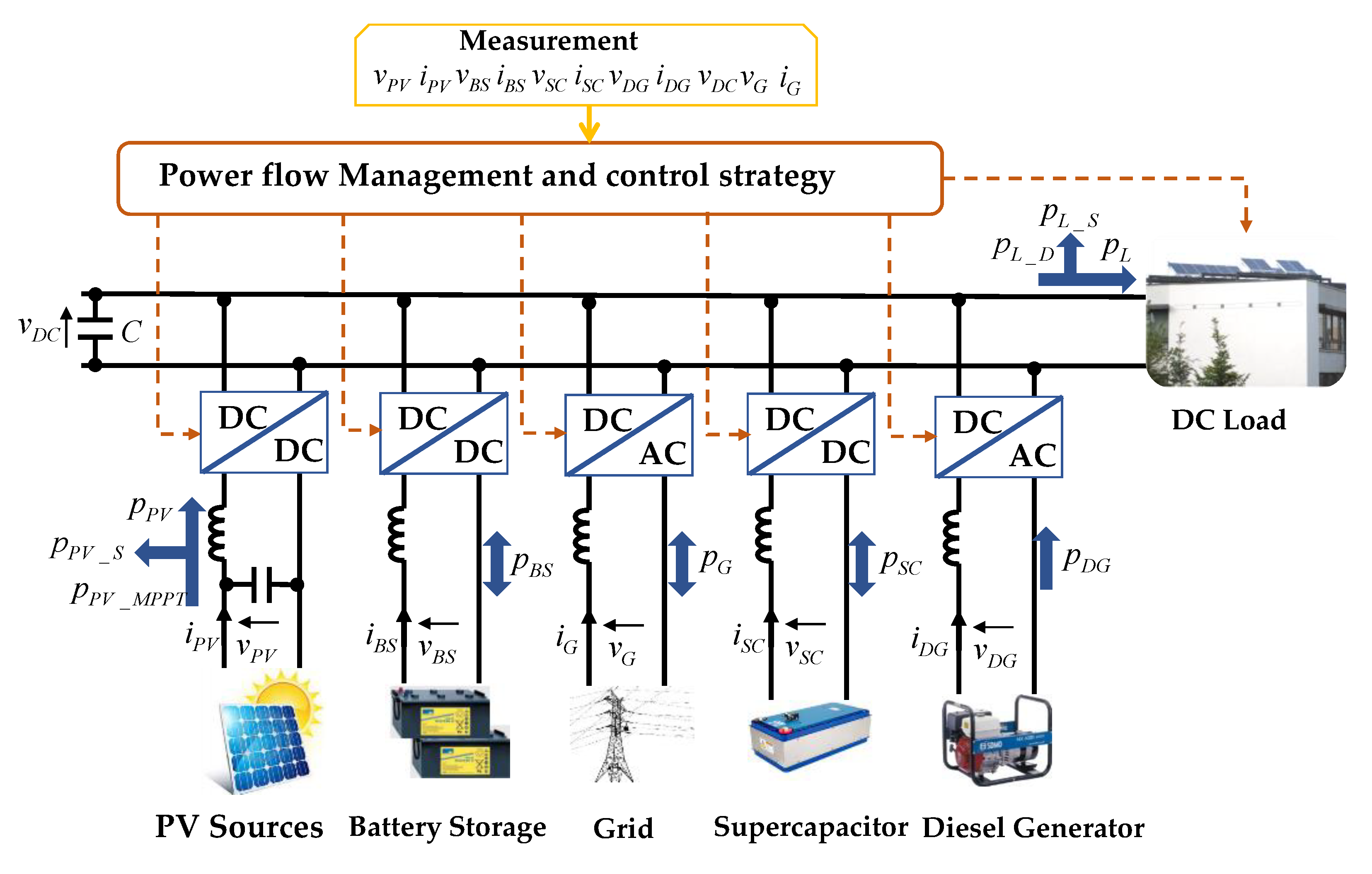
- This paper proposes an algorithm for both the power control and power management of a full DC microgrid building, integrated under the ruled based decision according to non-linear system modeling. The produced energy is dedicated to the self-consumption of the building’s electrical appliances, aiming to reach the maximal usage rate of renewable energy and to reduce the usage of the public grid. A battery storage (BS) system, a single phrase public grid connection, a group of PV panels, a DG-like backup source, an SC, and a load seen like a group of pre-defined controllable appliances are integrated into the full DC microgrid. The BS and the public grid can be the controllable sources to supply power deficiency and to absorb the excess power during the on-grid operation of the full DC microgrid. Furthermore, the BS has a higher priority than the public grid to supply the full DC microgrid, which can reduce the stress on the public grid by making full use of the local BS. The DG can make the microgrid more reliable in cases of a high load demand, insufficient PV power generation, exhausted BS power, and low power limitation or failure of the public grid.
- The constraints of PV sources, public grid, BS, DG, and SC are considered and defined according to the mathematical modeling of each component. The PV production capacity is considered according to the maximal load demand, and the PV power constraints can make it work at two operation modes: PV maximum power point tracking (MPPT) mode and the PV power shedding mode. The BS is constrained by its power limitation and state of charge to keep it working normally and safely for a long lifetime. The public grid is constrained by the power limitation received from the public grid distribution system operator to increase the stability and thus to reduce the cost. The DG can be turned on and turned off, respecting the constraints of its rated power and a duty time cycle, aiming to protect its lifetime and to reduce the usage and energy cost. The low dynamic power during the DG start-up can lead to power deficiency in the microgrid and this power is compensated for by the SC. The SC is limited by its state of charge and power to keep its lowest power to compensate for the DG. The SC can operate at power charging mode, power discharging mode, or self-discharging mode.
- A real-time load optimization method is applied in this paper. The controllable load is controlled by the user and the microgrid operator. The user can randomly turn on the load when the user needs the load to work. The microgrid power control decides automatically and optimally the load state by using the real-time load optimization algorithm based on the load priority, load time constraints, and load power characteristics. Moreover, the load optimization algorithm can operate in real-time to increase the decision efficiency, as well as to provide adequate time for the convergence time of the local controller.
2. Full DC Microgrid System Modeling
2.1. Microgrid System Modeling
2.2. PV Sources
2.3. Public Grid Connection
2.4. Battery Storage System
2.5. Diesel Generator and Supercapacitor
2.6. DC Load
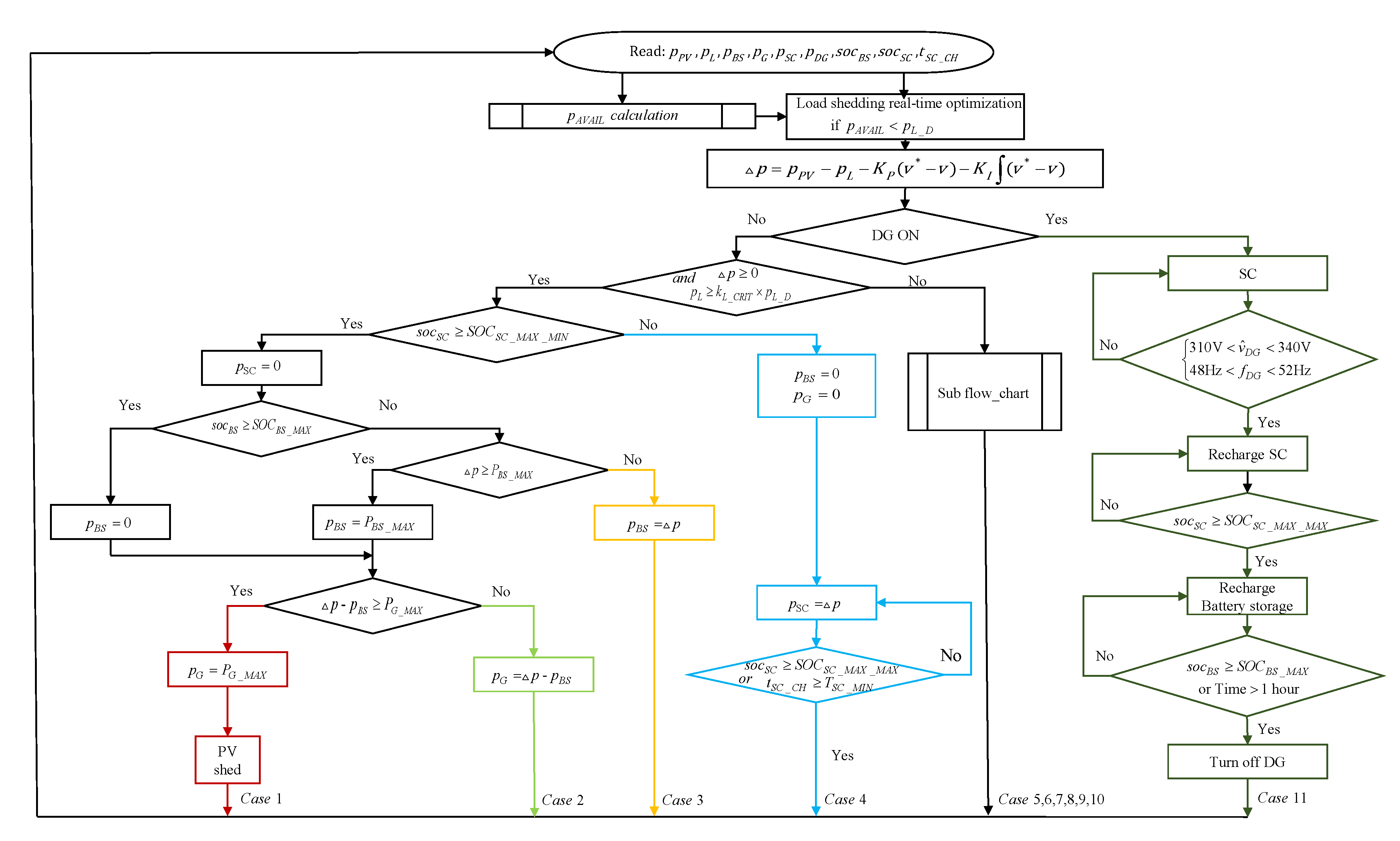
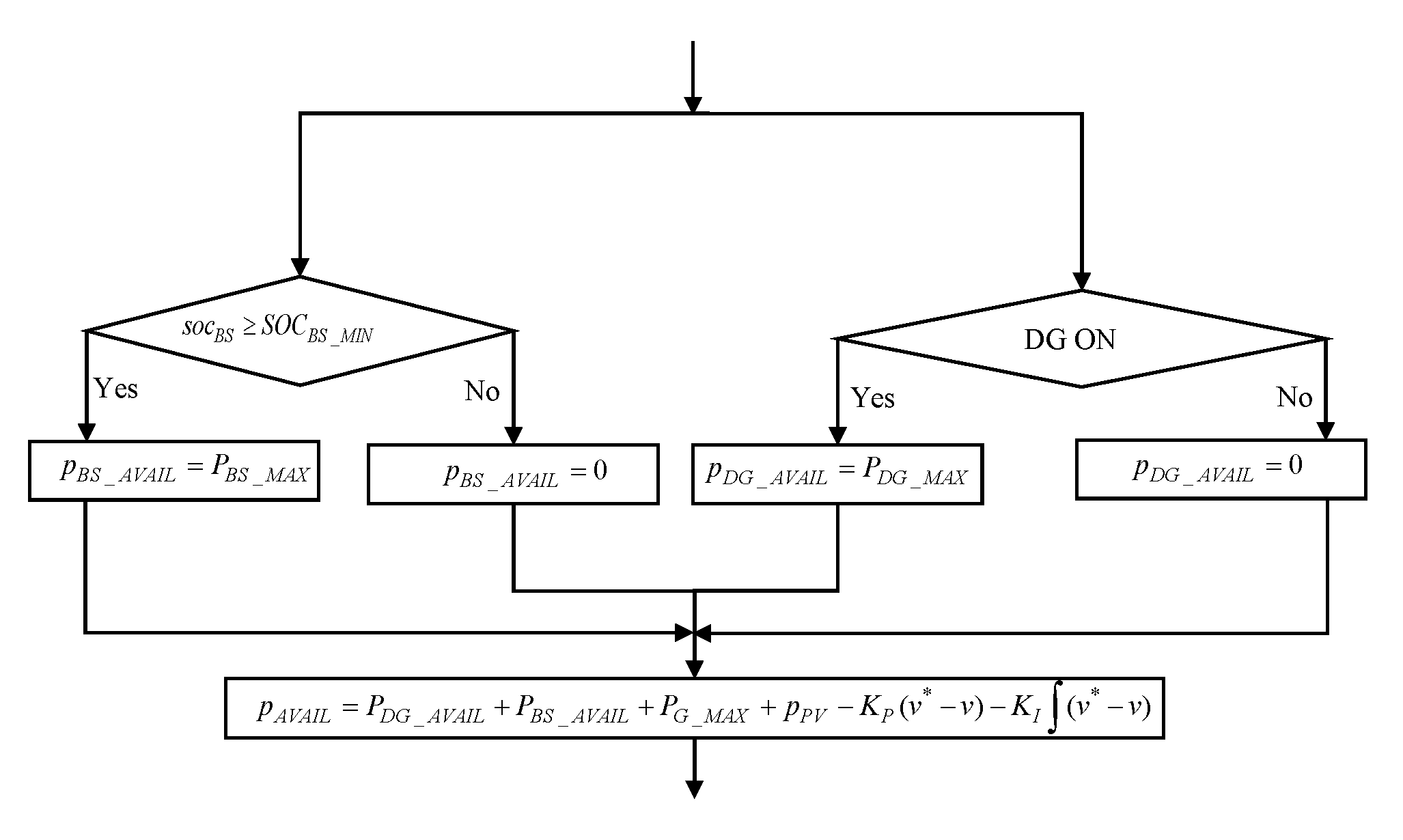
3. Algorithm for Power Control and Power Management
3.1. Case 1, 2, 3, 4
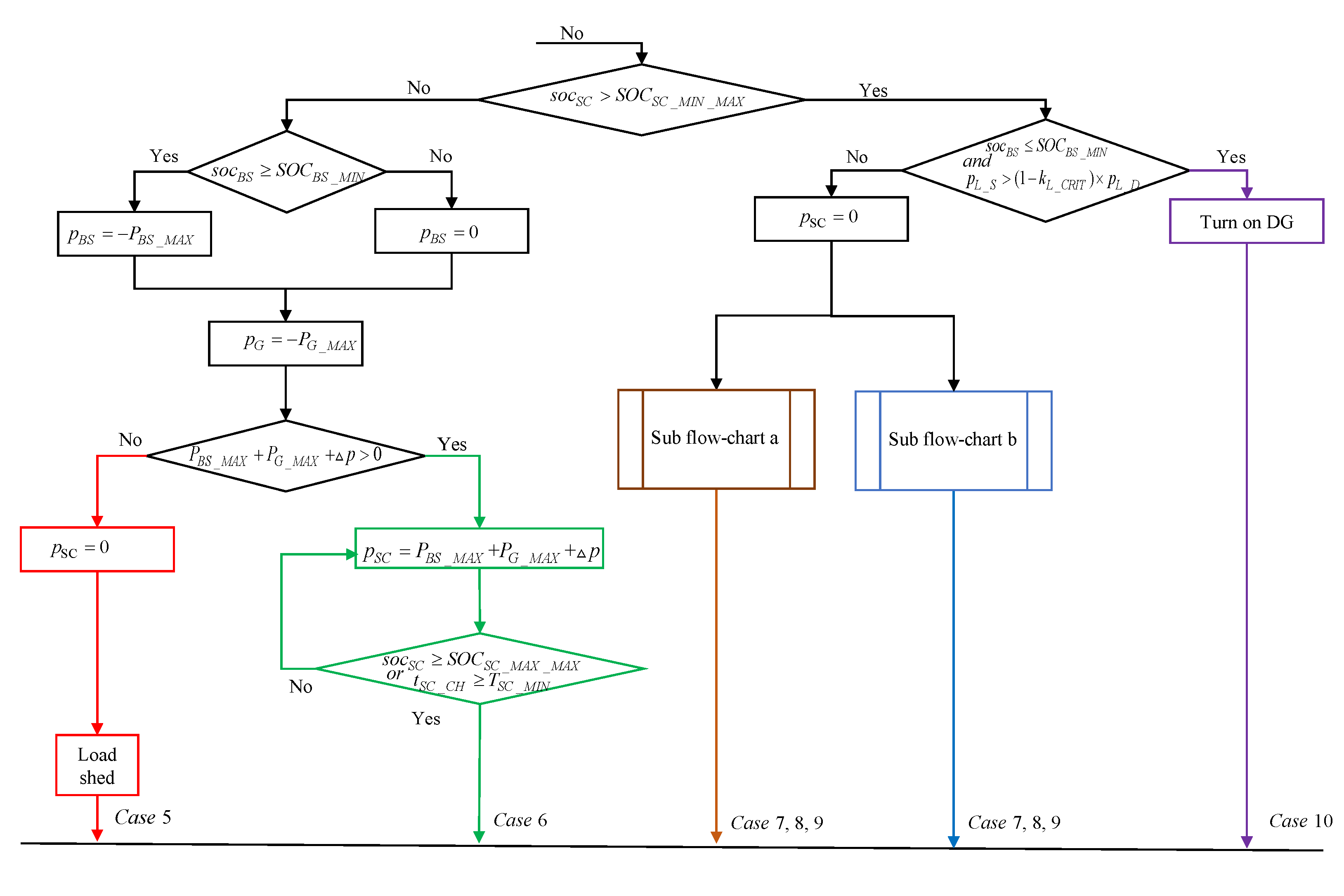
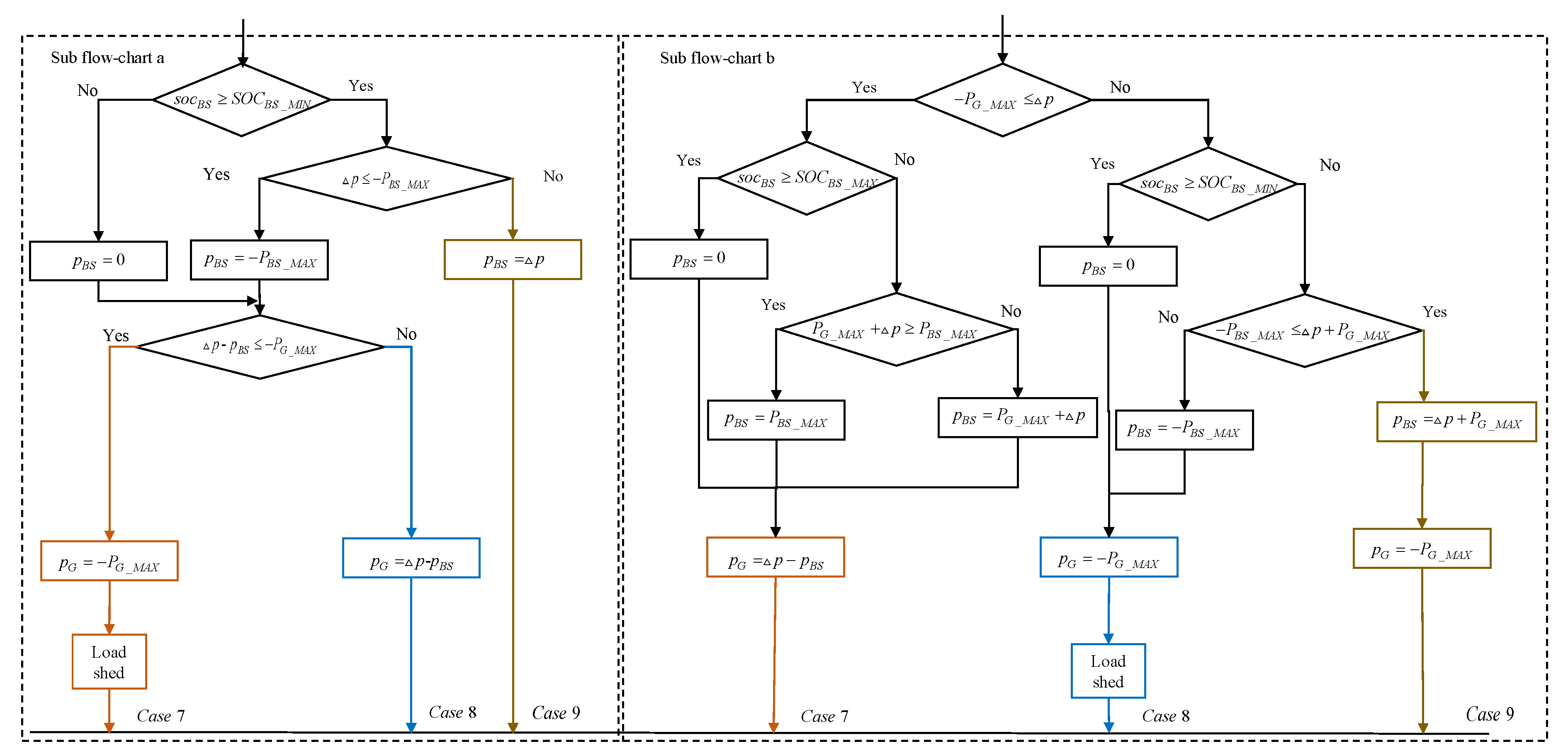
3.2. Case 5, 6, 7, 8, 9, 10
3.3. Case 11
4. Simulation Results and Analyses
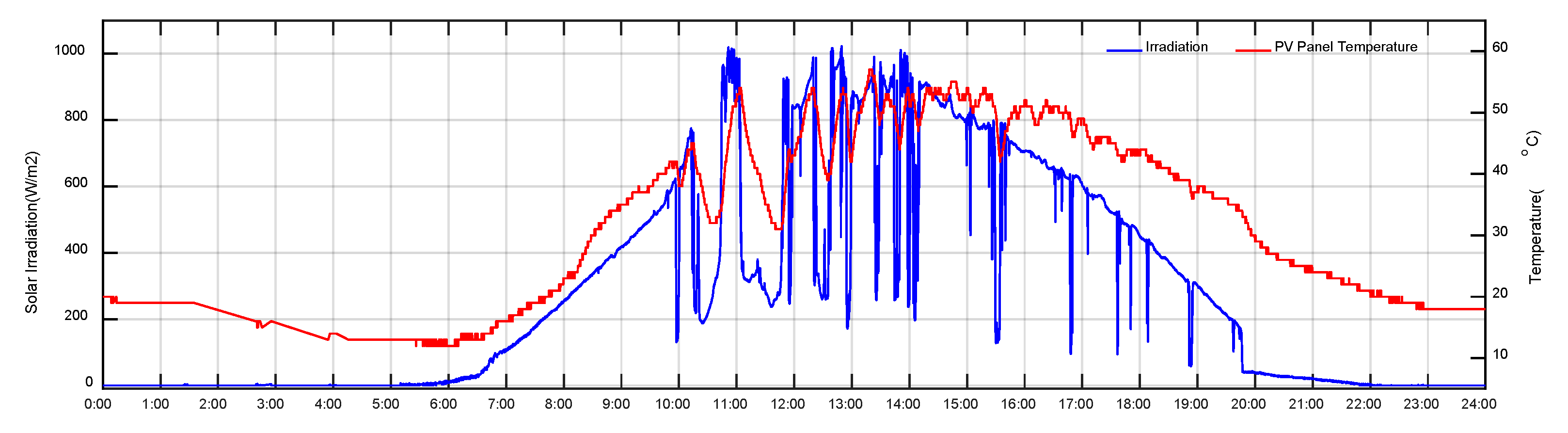
4.1. Simulation Case
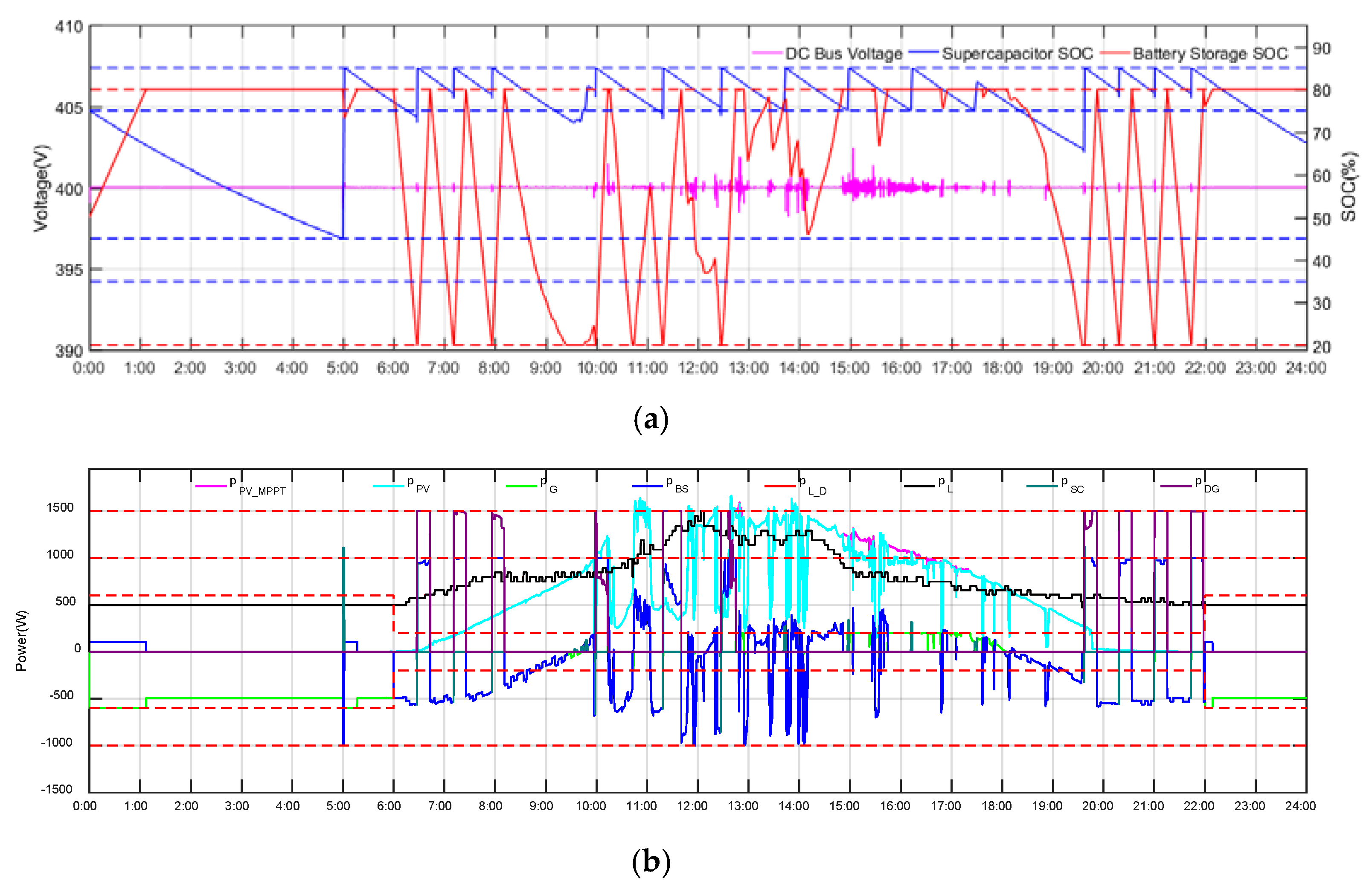
4.2. Results and Analyses
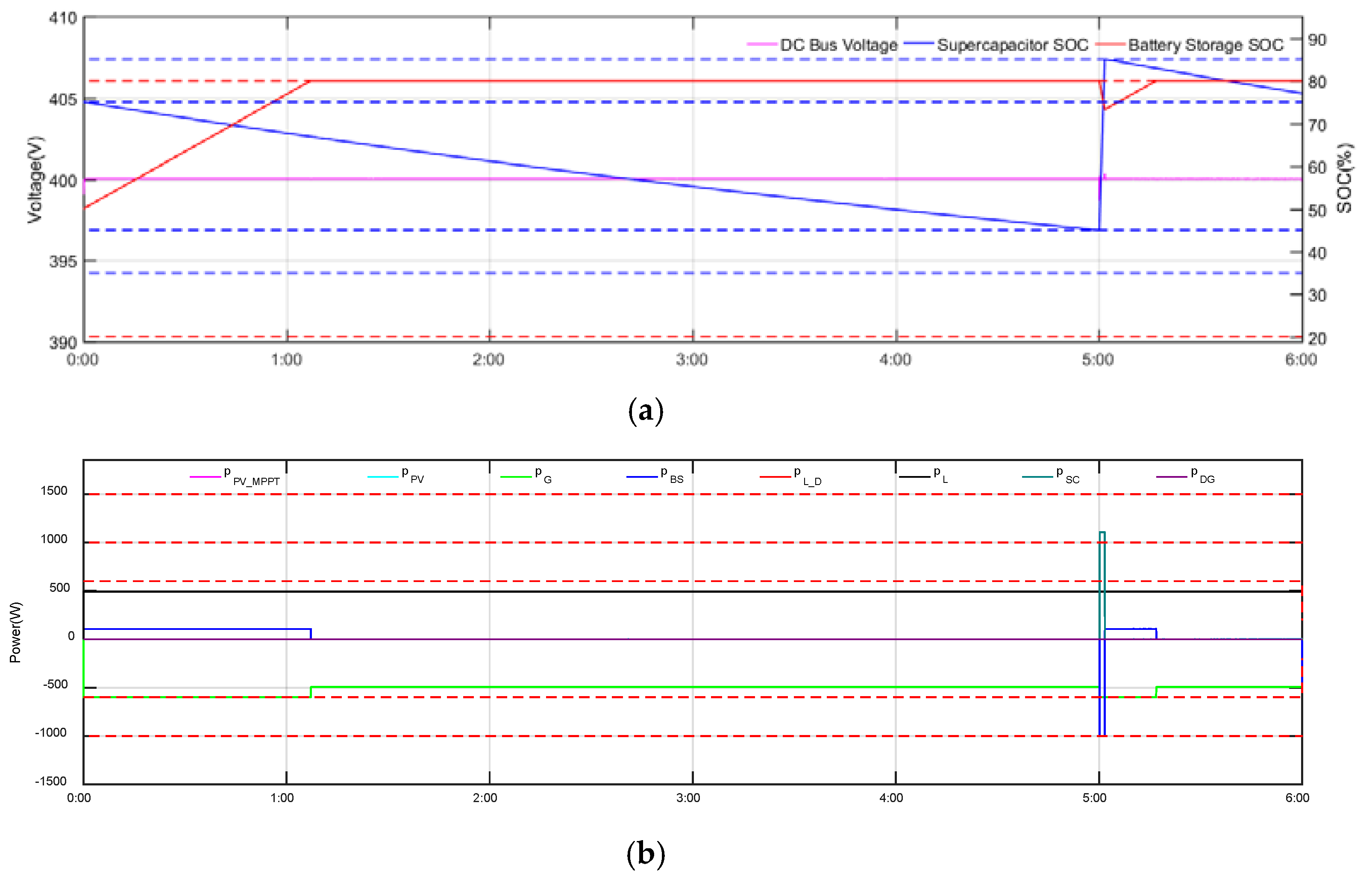
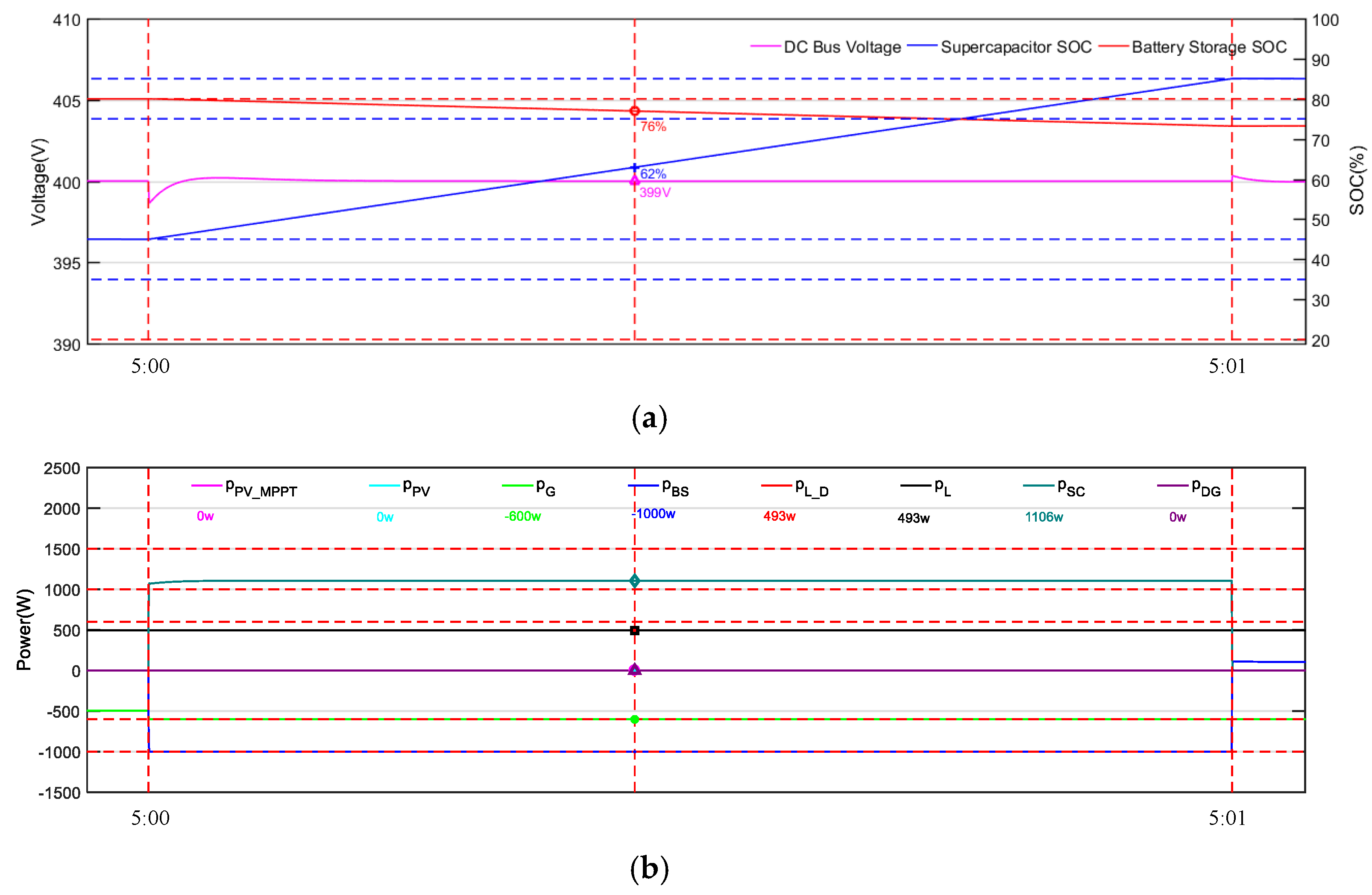
4.2.1. Simulation Results and Analyses for 0:00 to 6:00
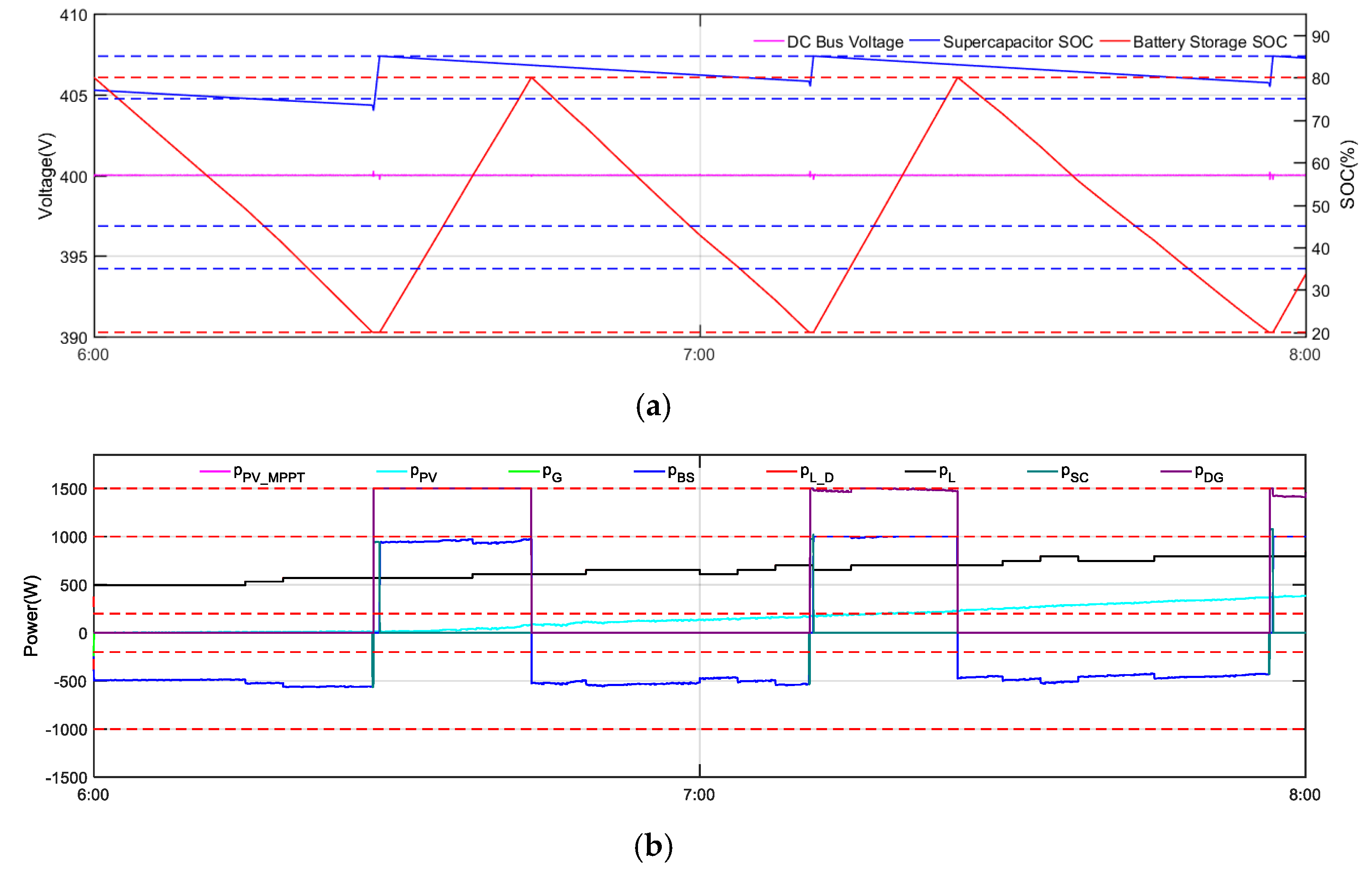
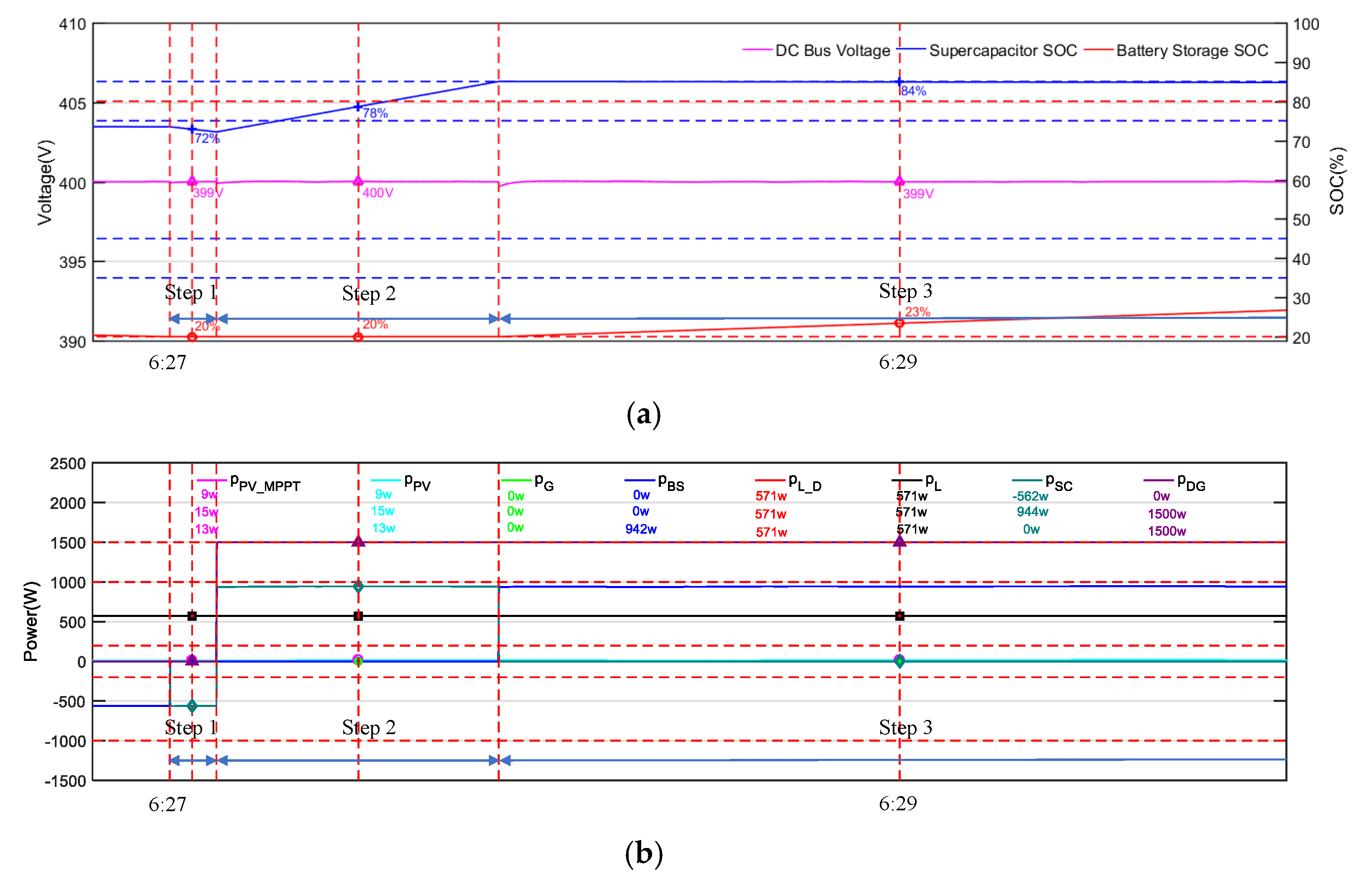
4.2.2. Simulation Results and Analyses for 6:00 to 8:00
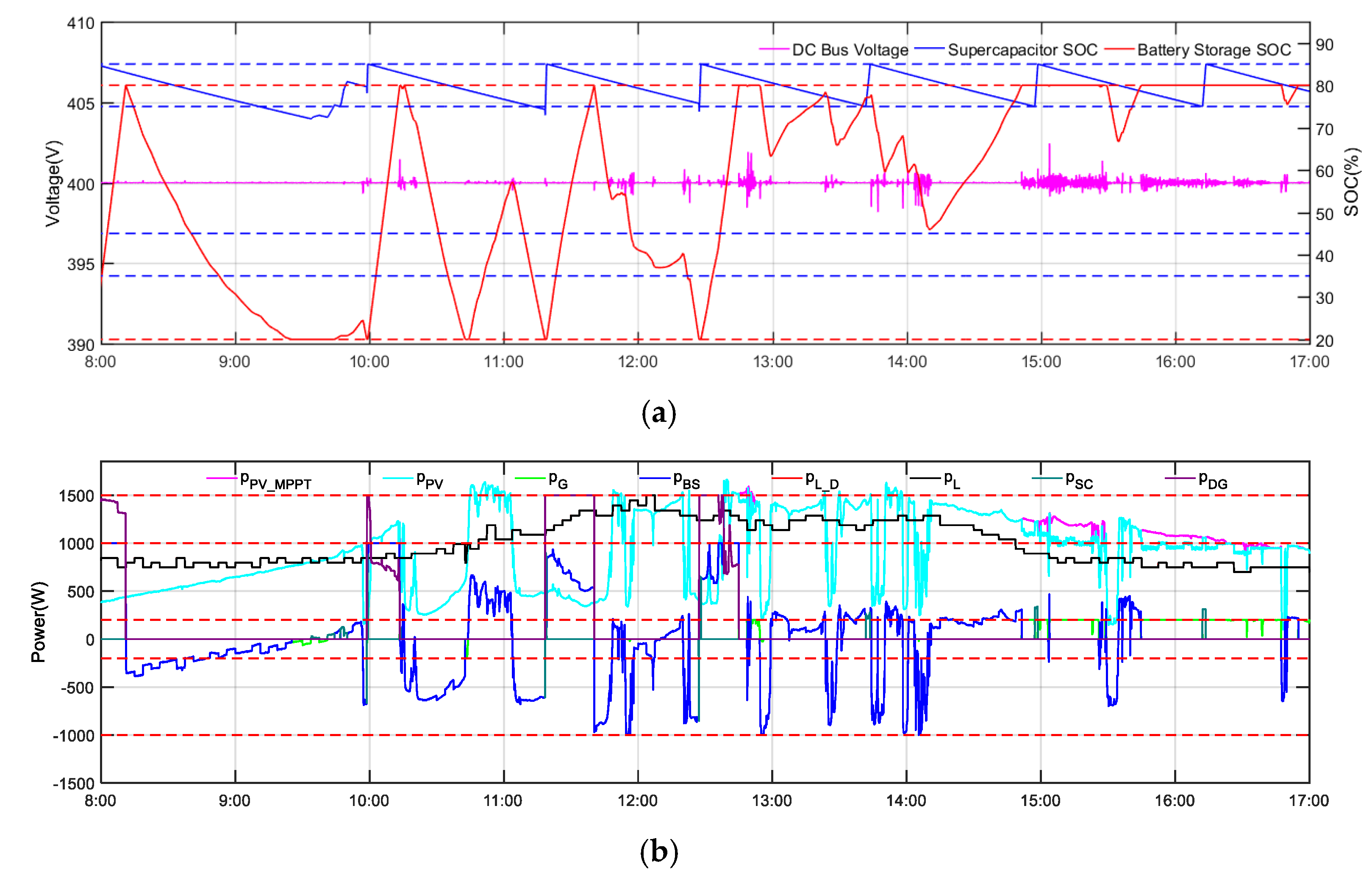
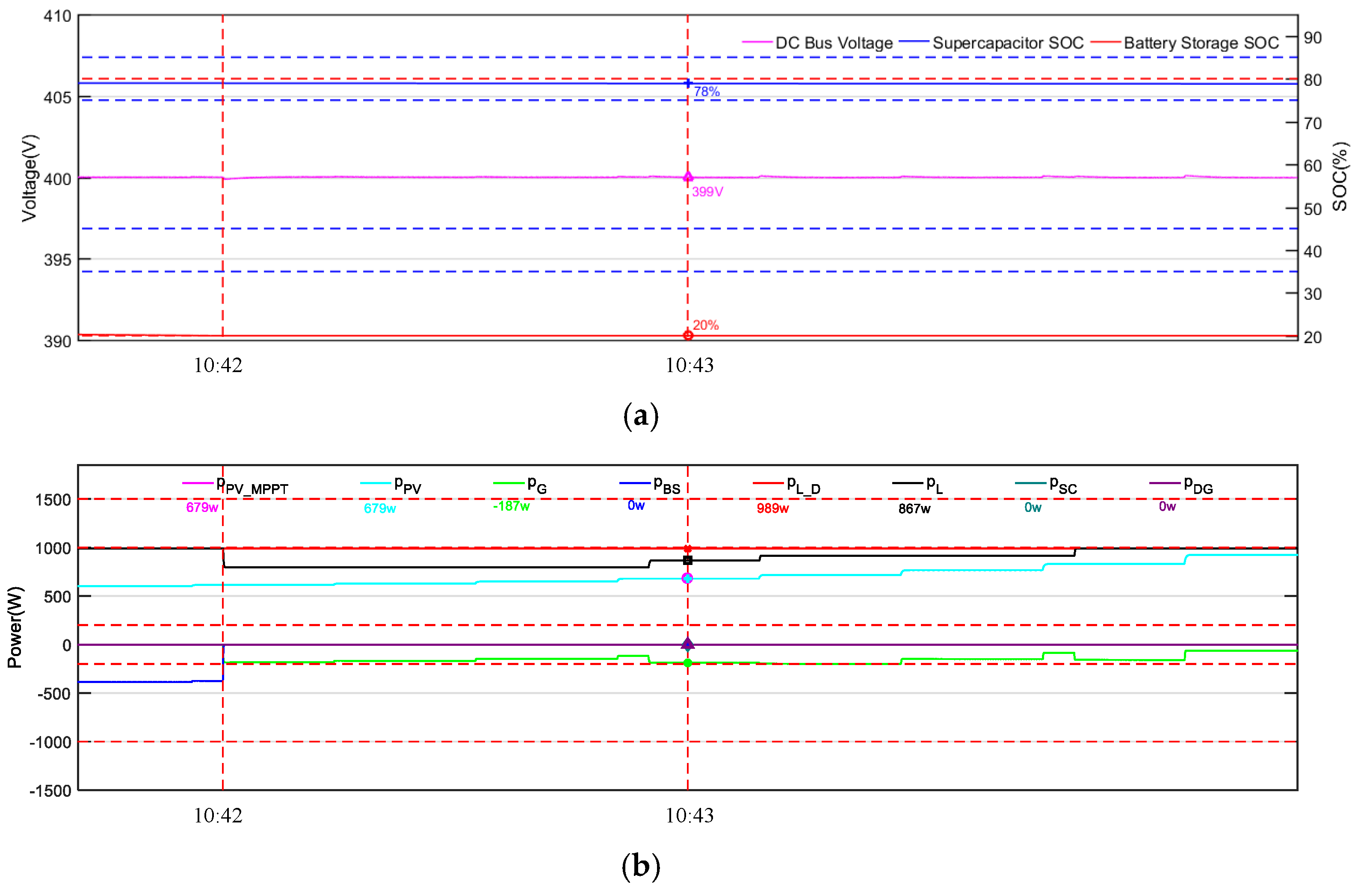
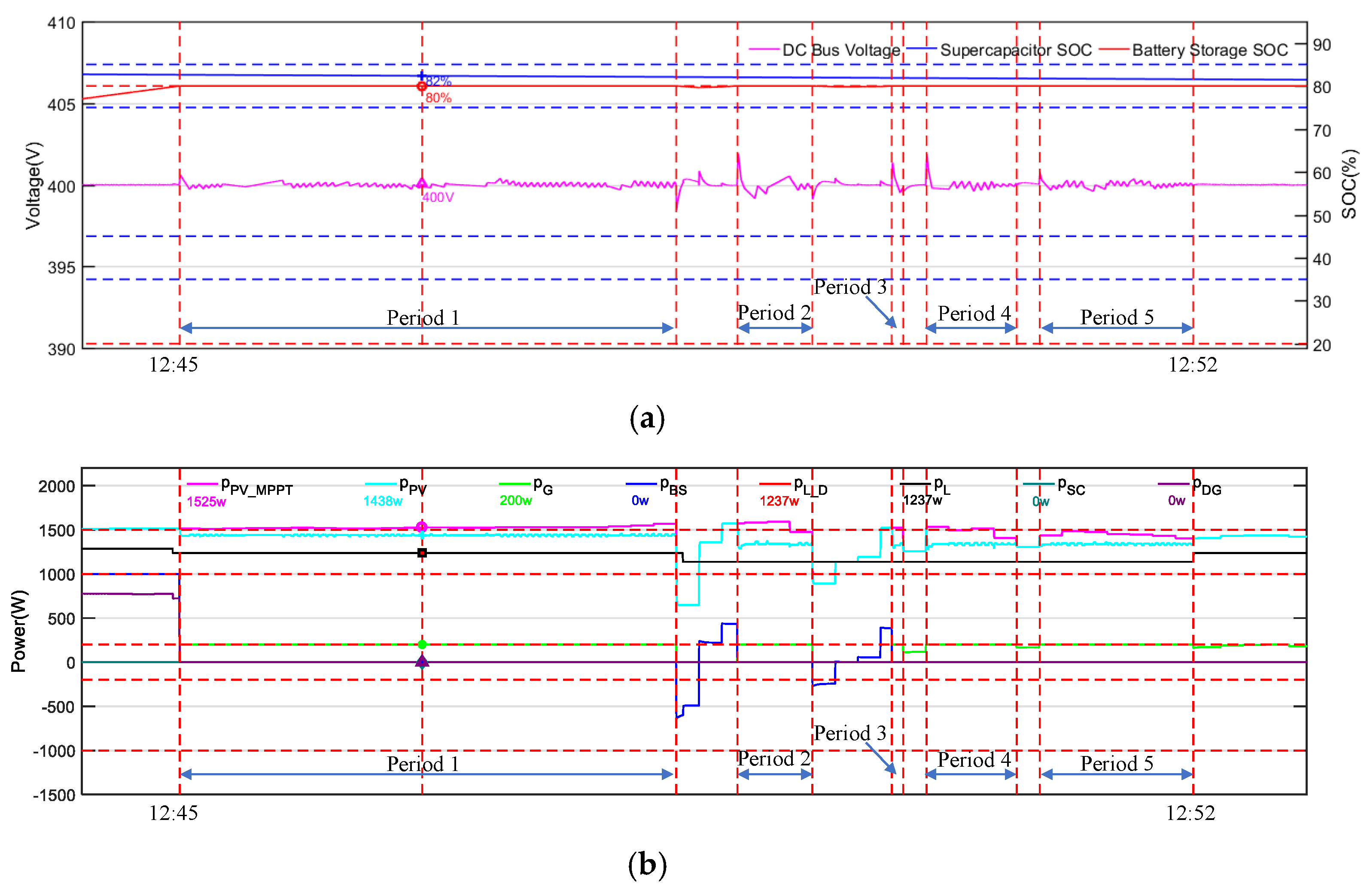
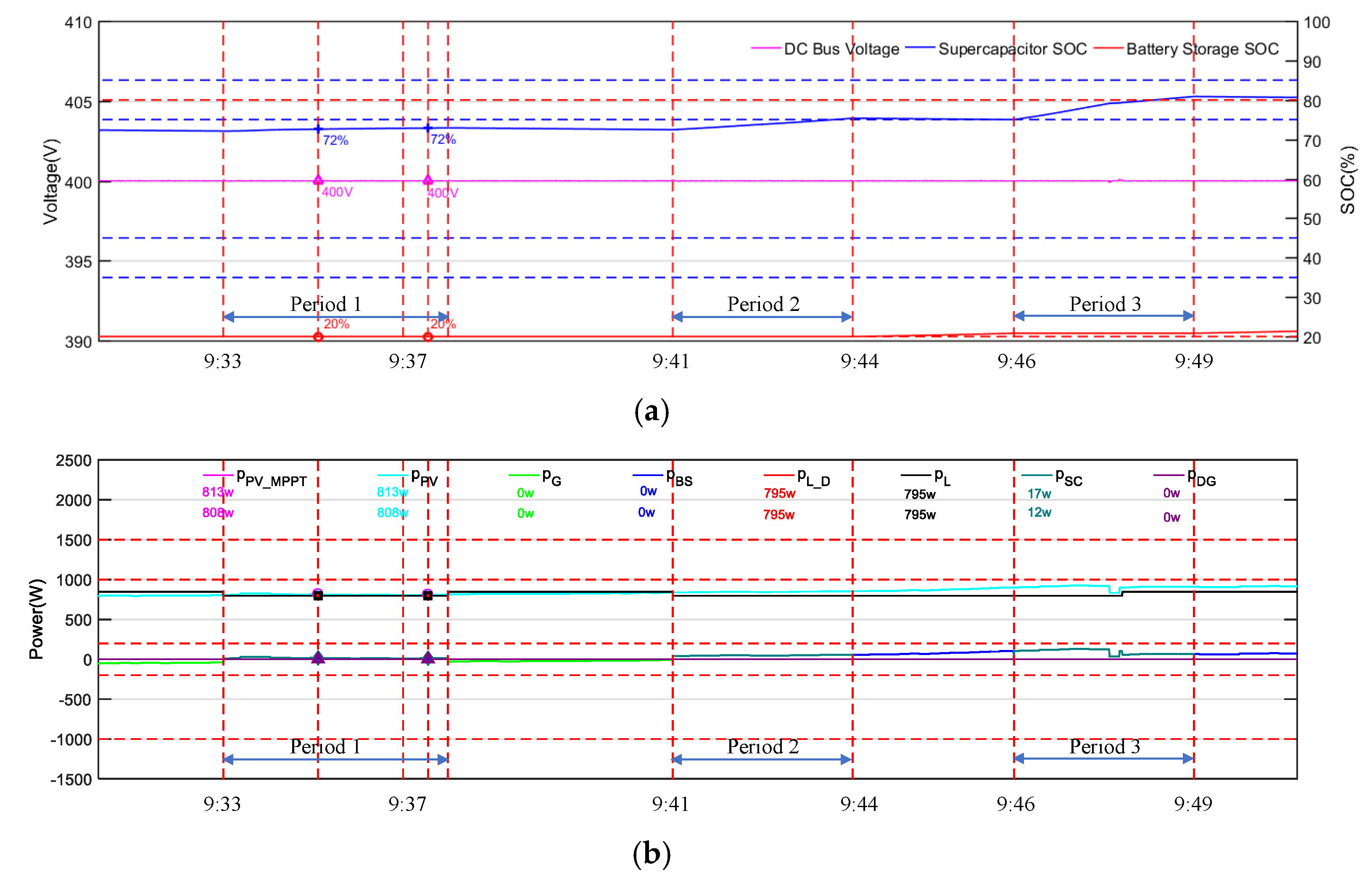
4.2.3. Simulation Results and Analyses for 8:00 to 17:00
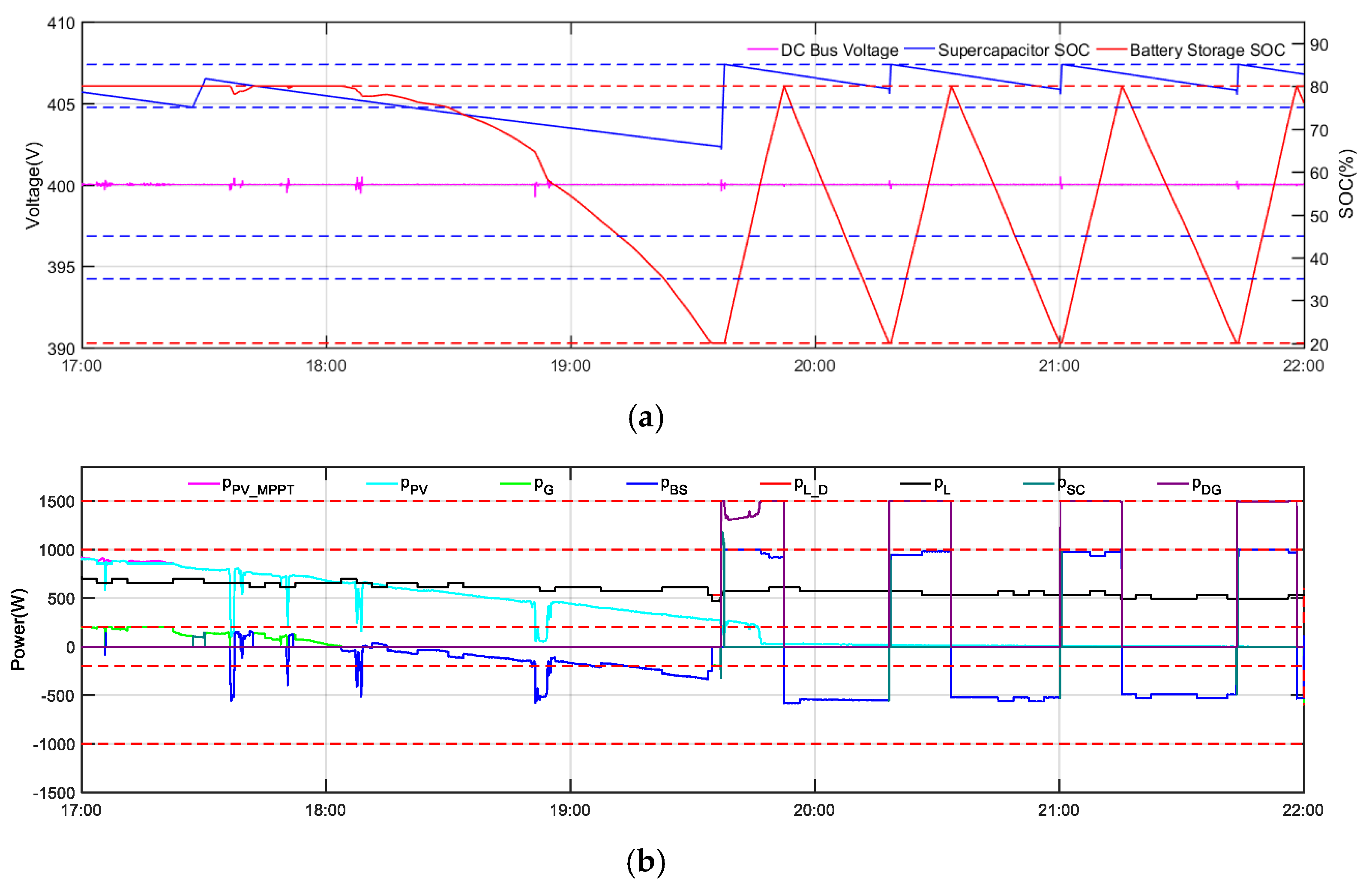
4.2.4. Simulation Results and Analyses for 17:00 to 22:00
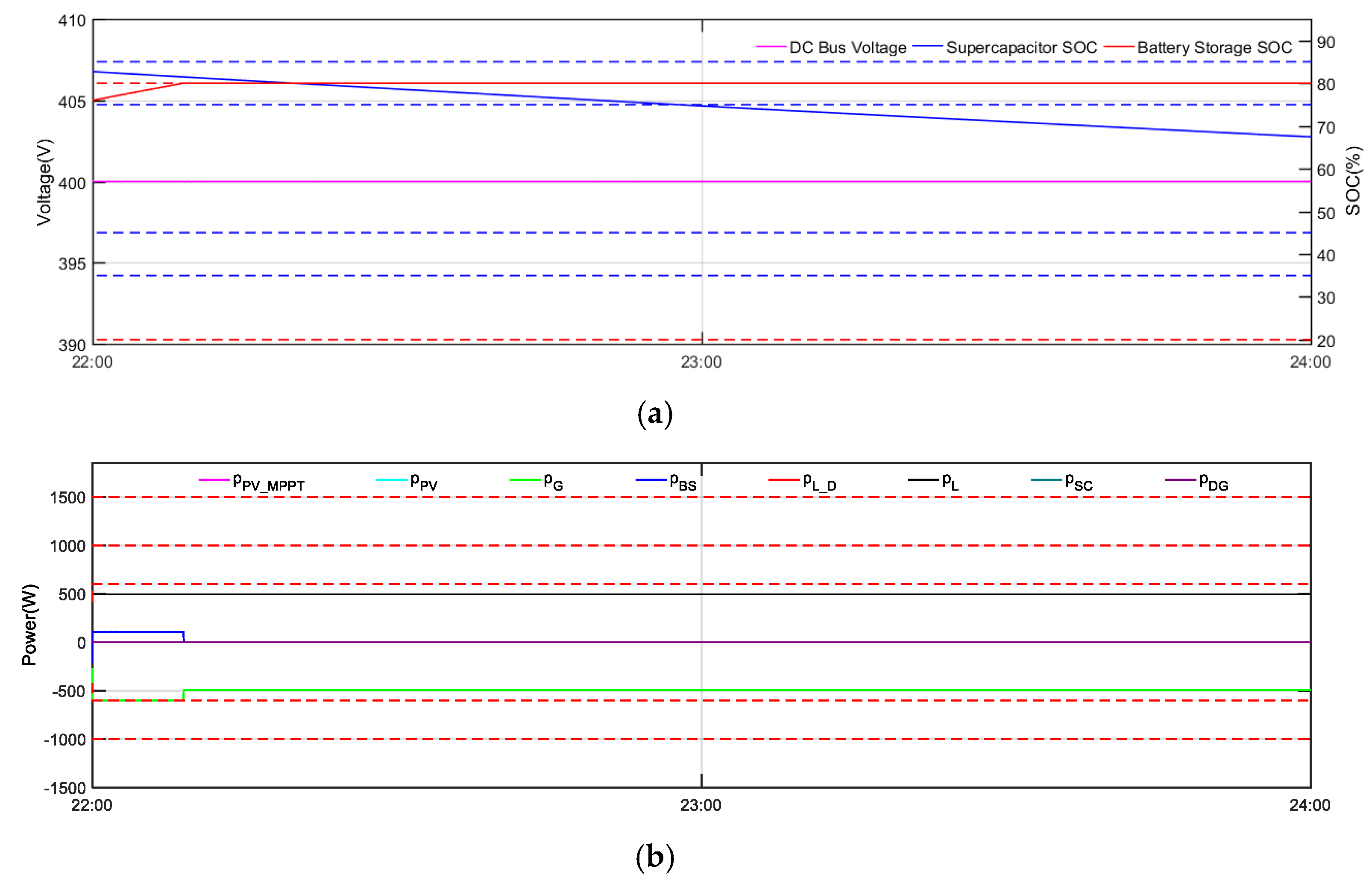
4.2.5. Simulation Results and Analyses for 22:00 to 24:00
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sechilariu, M.; Molines, N.; Richard, G.; Martell-Flores, H.; Locment, F.; Baert, J. Electromobility framework study: Infrastructure and urban planning for EV charging station empowered by PV-based microgrid. IET Electr. Syst. Transp. 2019, 9, 176–185. [Google Scholar] [CrossRef]
- Mariam, L.; Basu, M.; Conlon, M. Microgrid: Architecture, policy and future trends. Renew. Sustain. Energy Rev. 2016, 64, 477–489. [Google Scholar] [CrossRef]
- Kumar, M.; Tyagi, B. A state of art review of microgrid control and integration aspects. In Proceedings of the 2016 7th India International Conference on Power Electronics (IICPE), Patiala, India, 17–19 November 2016; pp. 1–6. [Google Scholar]
- Sechilariu, M.; Wang, B.; Locment, F.M.S.F.L. Power management and optimization for isolated DC microgrid. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Ischia, Italy, 18–20 June 2014; pp. 1284–1289. [Google Scholar]
- Sechilariu, M.; Locment, F.; Dos Santos, L.T. A conceptual framework for full optimal operation of a grid-connected DC microgrid. In Proceedings of the IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Hamilton, New Zealand, 31 January–2 February 2018; pp. 296–301. [Google Scholar]
- Lede, A.M.R.; Molina, M.; Martinez, M.; Mercado, P.E. Microgrid architectures for distributed generation: A brief review. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Quito, Ecuador, 20–22 September 2017; pp. 1–6. [Google Scholar]
- Sechilariu, M.; Locment, F. Urban DC Microgrid: Intelligent Control and Power Flow Optimization, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2016. [Google Scholar]
- Alseyat, A.; Park, J.-D. Multi-Agent System using JADE for Distributed DC Microgrid System Control. In Proceedings of the North American Power Symposium (NAPS), Wichita, KS, USA, 13–15 October 2019; pp. 1–5. [Google Scholar]
- Han, Y.; Ning, X.; Yang, P.; Xu, L. Review of Power Sharing, Voltage Restoration and Stabilization Techniques in Hierarchical Controlled DC Microgrids. IEEE Access 2019, 7, 149202–149223. [Google Scholar] [CrossRef]
- Amicarelli, E.; Tran, Q.T.; Bacha, S. Multi-agent system for day-ahead energy management of microgrid. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar]
- Dos Santos, L.T.; Sechilariu, M.; Locment, F. Prediction-based economic dispatch and online optimization for grid-connected DC microgrid. In Proceedings of the IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Dos Santos, L.T.; Sechilariu, M.; Locment, F. Prediction-based optimization for islanded microgrid resources scheduling and management. In Proceedings of the IEEE 24th International Symposium on Industrial Electronics (ISIE), Buzios, Brazil, 3–5 June 2015; pp. 760–765. [Google Scholar]
- Yi, Z.; Dong, W.; Etemadi, A.H. A Unified Control and Power Management Scheme for PV-Battery-Based Hybrid Microgrids for Both Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2017, 9, 5975–5985. [Google Scholar] [CrossRef]
- Sanjeev, P.; Padhy, N.P.; Agarwal, P. Autonomous Power Control and Management Between Standalone DC Microgrids. IEEE Trans. Ind. Inform. 2017, 14, 2941–2950. [Google Scholar] [CrossRef]
- Sharma, R.K.; Mishra, S. Dynamic Power Management and Control of a PV PEM Fuel-Cell-Based Standalone ac/dc Microgrid Using Hybrid Energy Storage. IEEE Trans. Ind. Appl. 2017, 54, 526–538. [Google Scholar] [CrossRef]
- Thirugnanam, K.; Kerk, S.K.; Yuen, C.; Liu, N.; Zhang, M. Energy Management for Renewable Microgrid in Reducing Diesel Generators Usage With Multiple Types of Battery. IEEE Trans. Ind. Electron. 2018, 65, 6772–6786. [Google Scholar] [CrossRef]
- Solanki, B.; Raghurajan, A.; Bhattacharya, K.; Cañizares, C. Including smart loads for optimal demand response in integrated energy management systems for isolated microgrids. IEEE Trans. Smart Grid 2017, 8, 1. [Google Scholar] [CrossRef]
- Picco, I.U.; Lotero, R.C. Photovoltaic system simulation model for steady-state microgrid energy management application. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Conference—Latin America (ISGT Latin America), Gramado, Brazil, 15–18 September 2019; pp. 1–6. [Google Scholar]
- Yin, C.; Sechilariu, M.; Locment, F. Diesel generator slow start-up compensation by supercapacitor for DC microgrid power balancing. In Proceedings of the IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Yin, C.; Wu, H.; Locment, F.; Sechilariu, M. Energy management of DC microgrid based on photovoltaic combined with diesel generator and supercapacitor. Energy Convers. Manag. 2017, 132, 14–27. [Google Scholar] [CrossRef]
- Yin, C.; Wu, H.; Sechilariu, M.; Locment, F. Power Management Strategy for an Autonomous DC Microgrid. Appl. Sci. 2018, 8, 2202. [Google Scholar] [CrossRef]
- Khoa, T.D.; Dos Santos, L.T.; Sechilariu, M.; Locment, F. Load shedding and restoration real-time optimization for DC microgrid power balancing. In Proceedings of the IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Dos Santos, L.T.; Sechilariu, M.; Locment, F. Optimized Load Shedding Approach for Grid-Connected DC Microgrid Systems under Realistic Constraints. Buildings 2016, 6, 50. [Google Scholar] [CrossRef]
- Ibm Ilog Cplex Optimizer. Available online: http://ibm.com (accessed on 1 April 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 1750 W | 3600 s | ||
| 1000 W | 85% | ||
| 80% | 75% | ||
| 20% | 45% | ||
| 50% | 35% | ||
| 6.6 Ah | 75% | ||
| 400 V | 1500 W | ||
| 80% or 100% | 200 W or 600 W | ||
| 1500 W | 3 min |
| Period | Description | Choose of Power Strategy | ||
|---|---|---|---|---|
| 0:00–6:00 | Low load demand | Sub-flowchart b | 100% | 600 W |
| 6:00–8:00 | Different according to the seasons | Sub-flowchart a | 80% | 200 W |
| 8:00–17:00 | Working time in building | Sub-flowchart a | 80% | 200 W |
| 17:00–22:00 | High load demand from the public grid | Sub-flowchart a | 80% | 200 W |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, W.; Sechilariu, M.; Locment, F. DC Microgrid System Modeling and Simulation Based on a Specific Algorithm for Grid-Connected and Islanded Modes with Real-Time Demand-Side Management Optimization. Appl. Sci. 2020, 10, 2544. https://doi.org/10.3390/app10072544
Bai W, Sechilariu M, Locment F. DC Microgrid System Modeling and Simulation Based on a Specific Algorithm for Grid-Connected and Islanded Modes with Real-Time Demand-Side Management Optimization. Applied Sciences. 2020; 10(7):2544. https://doi.org/10.3390/app10072544
Chicago/Turabian StyleBai, Wenshuai, Manuela Sechilariu, and Fabrice Locment. 2020. "DC Microgrid System Modeling and Simulation Based on a Specific Algorithm for Grid-Connected and Islanded Modes with Real-Time Demand-Side Management Optimization" Applied Sciences 10, no. 7: 2544. https://doi.org/10.3390/app10072544
APA StyleBai, W., Sechilariu, M., & Locment, F. (2020). DC Microgrid System Modeling and Simulation Based on a Specific Algorithm for Grid-Connected and Islanded Modes with Real-Time Demand-Side Management Optimization. Applied Sciences, 10(7), 2544. https://doi.org/10.3390/app10072544