Control strategies of gecko’s toe in response to reduced gravity




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Animals
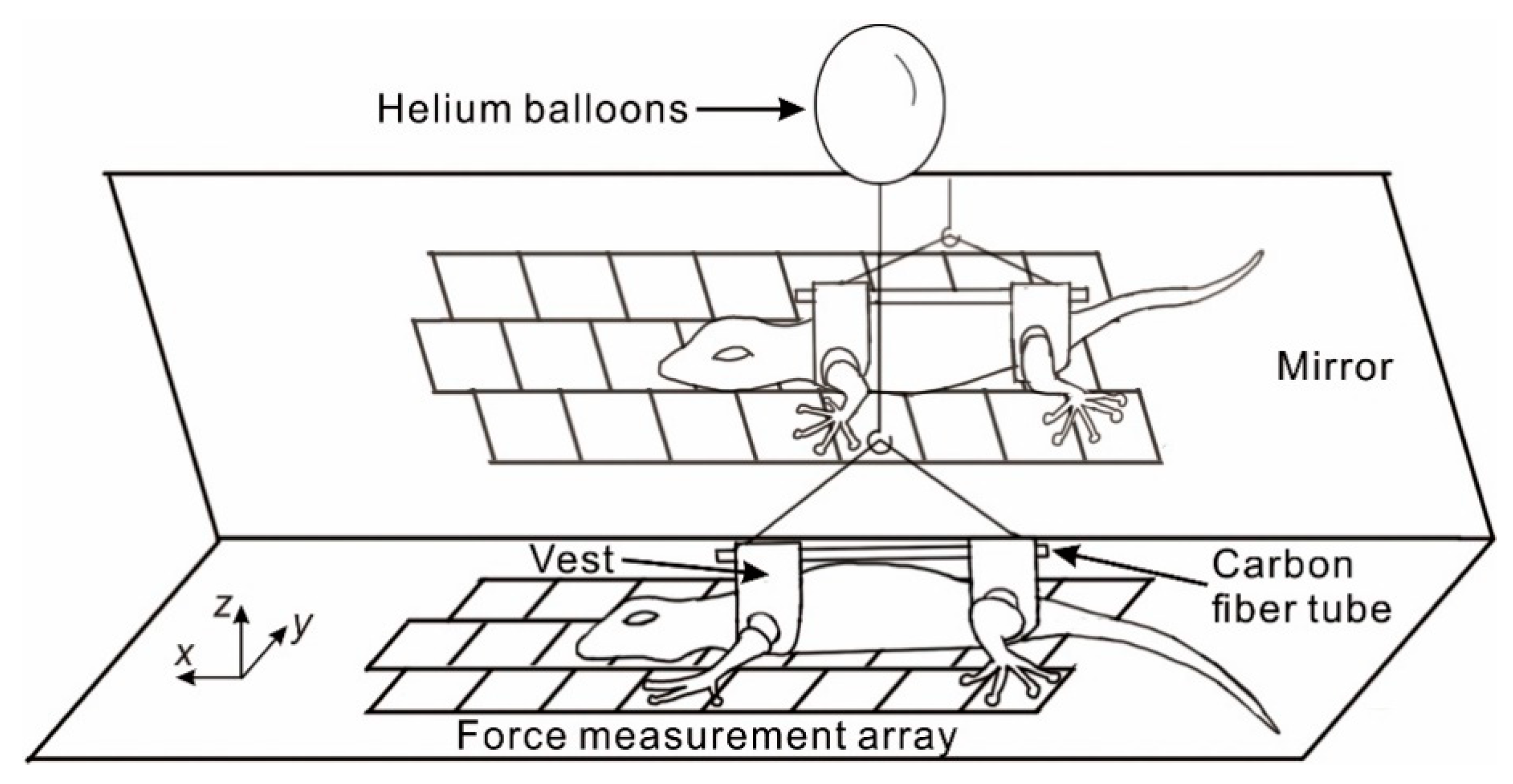
2.2. Force Measurement Set-up
2.3. Video Recording
2.4. Force Measurements
2.5. Analysis of Forces and Video Recordings
3. Statistics
4. Results
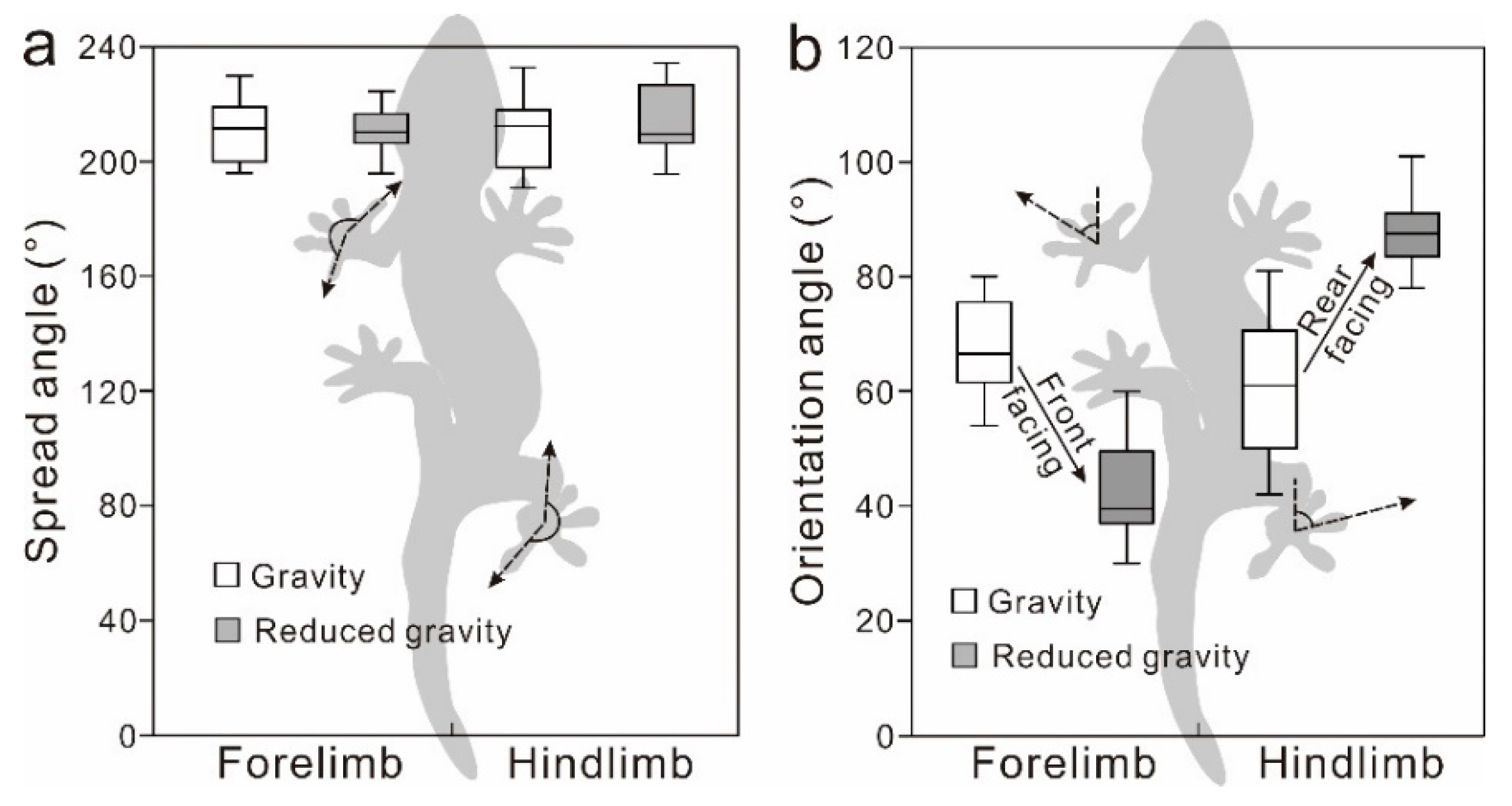
4.1. Foot Alignment
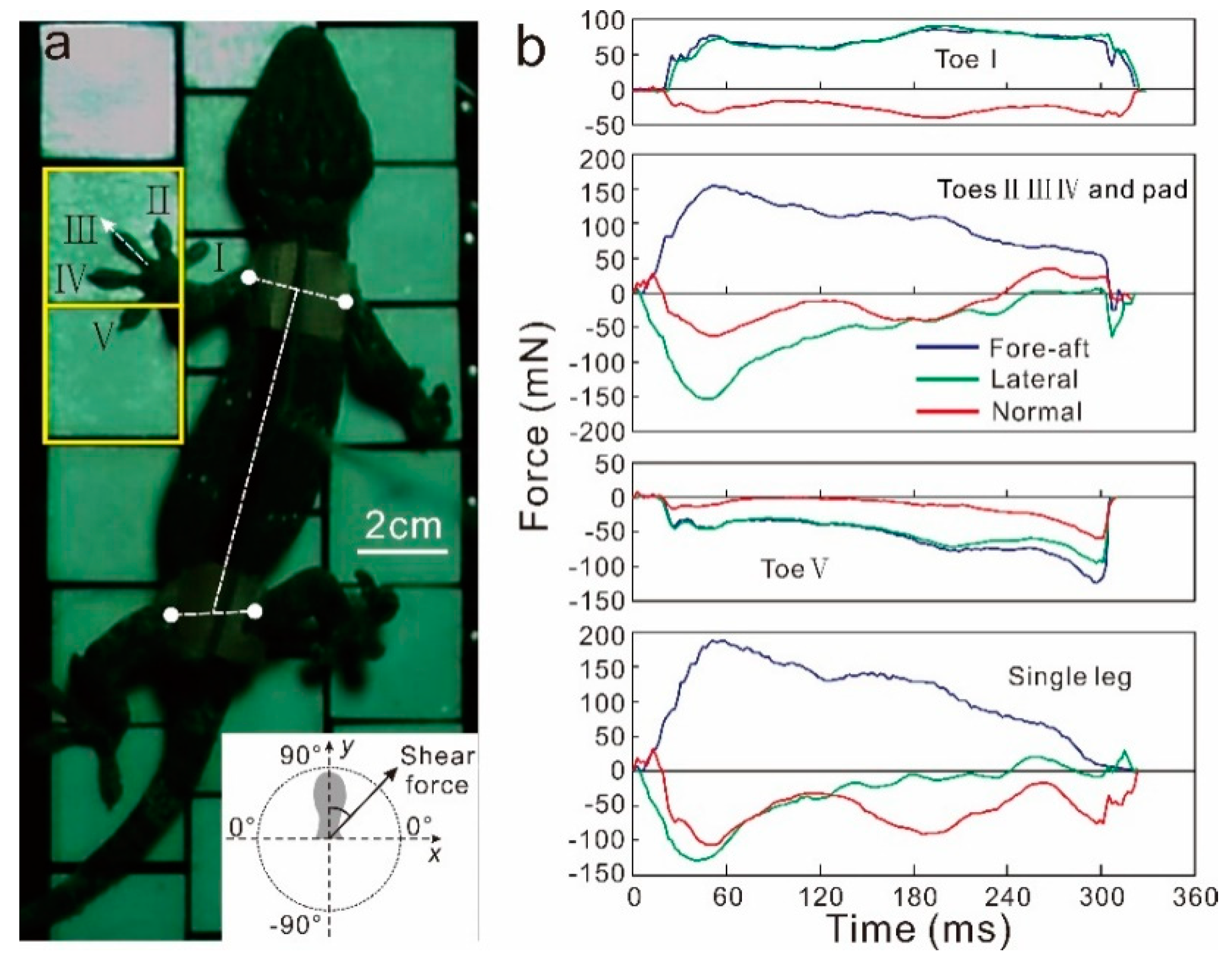
4.2. Ground Reaction Forces
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681–685. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M. Frictional adhesion: A new angle ongecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 2005, 37, 275–285. [Google Scholar] [CrossRef]
- Wang, Z.; Dai, Z.; Ji, A.; Ren, L.; Xing, Q.; Dai, L. Biomechanics of gecko locomotion: The patterns of reaction forces on inverted, vertical and horizontal substrates. Bioinsp. Biomim. 2015, 10, 016019. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Hsieh, S.T.; Dudek, D.M.; Chen, J.; Chitaphan, C.; Full, R.J. Dynamics of geckos running vertically. J. Exp. Biol. 2006, 209, 260–272. [Google Scholar] [CrossRef] [PubMed]
- Birn-Jeffery, A.V.; Higham, T.E. Geckos decouple fore-and hind limb kinematics in response to changes in incline. Front. Zool. 2016, 13, 11. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.J.; Peattie, A.M.; Autumn, K.; Full, R.J. Differential leg function in a sprawled-posture quadrupedal trotter. J. Exp. Biol. 2006, 209, 249–259. [Google Scholar] [CrossRef]
- Higham, T.E.; Birn-Jeffery, A.V.; Collins, C.E.; Hulsey, C.D.; Russell, A.P. Adaptive simplification and the evolution of gecko locomotion: Morphological and biomechanical consequences of losing adhesion. Proc. Natl. Acad. Sci. USA 2015, 112, 809–814. [Google Scholar] [CrossRef]
- Irschick, D.J.; Jayne, B.C. Effects of incline on speed, acceleration, body posture and hindlimb kinematics in two species of lizard Callisaurus draconoides and Uma scoparia. J. Exp. Biol. 1998, 201, 273–287. [Google Scholar]
- Irschick, D.J.; Jayne, B.C. Comparative three-dimensional kinematics of the hindlimb for high-speed bipedal and quadrupedal locomotion of lizards. J. Exp. Biol. 1999, 202, 1047–1065. [Google Scholar]
- Irschick, D.J.; Vanhooydonck, B.; Herrel, A.; Andronescu, A. Effects of loading and size on maximum power output and gait characteristics in geckos. J. Exp. Biol. 2003, 206, 3923–3934. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Zaaf, A.; Van Damme, R.; Herrel, A.; Aerts, P. Spatio-temporal gait characteristics of level and vertical locomotion in a ground-dwelling and a climbing gecko. J. Exp. Biol. 2001, 204, 1233–1246. [Google Scholar] [PubMed]
- Filippov, A.E.; Gorb, S.N. Spatial model of the gecko foot hair: Functional significance of highly specialized non-uniform geometry. Interface Focus 2015, 5, 20140065. [Google Scholar] [CrossRef] [PubMed]
- Daley, M.A.; Biewener, A.A. Running over rough terrain reveals limb control for intrinsic stability. Proc. Natl. Acad. Sci. USA 2006, 103, 15681–15686. [Google Scholar] [CrossRef]
- Dickinson, M.H.; Farley, C.T.; Full, R.J.; Koehl, M.A.R.; Kram, R.; Lehman, S. How animals move: An integrative view. Science 2000, 288, 100–106. [Google Scholar] [CrossRef]
- Full, R.J.; Koditschek, D.E. Templates and anchors: Neuromechanical hypotheses of legged locomotion on land. J. Exp. Biol. 1999, 202, 3325–3332. [Google Scholar]
- Jindrich, D.L.; Full, R.J. Dynamic stabilization of rapid hexapedallocomotion. J. Exp. Biol. 2002, 205, 2803–2823. [Google Scholar]
- Sponberg, S.; Full, R.J. Neuromechanical response of musculo-skeletal structures in cockroaches during rapid running on rough terrain. J. Exp. Biol. 2008, 211, 433–446. [Google Scholar] [CrossRef]
- Russell, A.P.; Higham, T.E. A new angle on clinging in geckos: Incline, not substrate, triggers the deployment of the adhesive system. Proc. R. Soc. B 2009, 276, 3705–3709. [Google Scholar] [CrossRef]
- Birn-Jeffery, A.V.; Higham, T.E. Geckos significantly alter foot orientation to facilitate adhesion during downhill locomotion. Biol. Lett. 2014, 10, 20140456. [Google Scholar] [CrossRef][Green Version]
- Zhuang, M.V.; Higham, T.E. Arboreal day geckos (Phelsuma madagascariensis) Differentially modulate fore- and hind limb kinematics in response to changes in habitat structure. PLoS ONE 2016, 11, e0153520. [Google Scholar] [CrossRef] [PubMed]
- Dai, Z.; Wang, Z.; Ji, A. Dynamics of gecko locomotion: A force-measuring array to measure 3D reaction forces. J. Exp. Biol. 2011, 214, 703–708. [Google Scholar] [CrossRef] [PubMed]
- Hedrick, T.L. Software techniques for two- and three-dimensional kinematic measurements of biological and biomimetic systems. Bioinsp. Biomim. 2008, 3, 034001. [Google Scholar] [CrossRef] [PubMed]
- Huber, G.; Gorb, S.N.; Spolenak, R.; Arzt, E. Resolving the nanoscale adhesion of individual gecko spatulae by atomic force microscopy. Biol. Lett. 2005, 1, 2–4. [Google Scholar] [CrossRef] [PubMed]
- Wan, J.; Tian, Y.; Zhou, M.; Zhang, X.J.; Meng, Y.G. Experimental research of load effect on the anisotropic friction behaviors of gecko seta array. Acta Phys. Sin. 2012, 61, 016202. [Google Scholar]
- Tian, Y.; Pesika, N.; Zeng, H.; Rosenberg, K.; Zhao, B.; McGuiggan, P.; Autumn, K. Adhesion and friction in gecko toe attachment and detachment. Proc. Natl. Acad. Sci. USA 2006, 103, 19320–19325. [Google Scholar] [CrossRef]
- Zhao, B.; Pesika, N.; Rosenberg, K.; Tian, Y.; Zeng, H.; McGuiggan, P.; Autumn, K.; Israelachvili, J. Adhesion and friction force coupling of gecko setal arrays: Implications for structured adhesive surfaces. Langmuir 2008, 24, 1517–1524. [Google Scholar] [CrossRef]
- Jeong, H.E.; Lee, J.K.; Kwak, M.K.; Moon, S.H.; Suh, K.Y. Effect of leaning angle of gecko-inspired slantedpolymer nanohairs on dry adhesion. Appl. Phys. Lett. 2010, 96, 043704. [Google Scholar] [CrossRef]
- Piccardo, M.; Chateauminois, A.; Fretigny, C.; Pugno, N.M.; Sitti, M. Contact compliance effects in the frictional response of bioinspired fibrillar adhesives. J. R. Soc. Interface 2013, 10, 20130182. [Google Scholar] [CrossRef]
- Shen, L.; Jagota, A.; Hui, C.Y. Mechanism of slidingfriction on a film-terminated fibrillar interface. Langmuir 2009, 25, 2772–2780. [Google Scholar] [CrossRef]
- Filippov, A.; Gorb, S.N. Frictional-anisotropy-based systems in biology: Structural diversity and numerical model. Sci. Rep. 2013, 3, 1240. [Google Scholar] [CrossRef] [PubMed]
- Hill, G.C.; Soto, D.R.; Peattie, A.M.; Full, R.J.; Kenny, T.W. Orientation angle and the adhesion of single gecko setae. J. R. Soc. Interface 2011, 8, 926–933. [Google Scholar] [CrossRef] [PubMed]
- Filippov, A.; Popov, V.L.; Gorb, S.N. Shear induced adhesion: Contact mechanics of biological spatula-like attachment devices. J. Theor. Biol. 2011, 276, 126–131. [Google Scholar] [CrossRef] [PubMed]
- Full, R.J.; Blickhan, R.; Ting, L. Leg design in hexapedal runners. J. Exp. Biol. 1991, 158, 369–390. [Google Scholar]
- Foster, K.L.; Higham, T.E. Context-dependent changes in motor control and kinematics during locomotion: Modulation and decoupling. Proc. R. Soc. B 2014, 281, 20133331. [Google Scholar] [CrossRef]
- Bußhardt, P.; Gorb, S.N. Walking on smooth and rough ground: Activity and timing of the claw retractor muscle in the beetle Pachnoda marginata peregrina (Coleoptera, Scarabaeidae). J. Exp. Biol. 2013, 216, 319–328. [Google Scholar] [CrossRef]
- Bußhardt, P.; Gorb, S.N. Ground reaction forces in vertically ascending beetles and corresponding activity of the claw retractor muscle on smooth and rough substrates. J. Comp. Physiol. A 2014, 200, 385–398. [Google Scholar] [CrossRef]
- Kubow, T.M.; Full, R.J. The role of the mechanical system in control: A hypothesis of self-stabilization in hexapedal runners. Philos. Trans. R. Soc. Lond. B 1999, 354, 849–861. [Google Scholar] [CrossRef]
- Frantsevich, L.; Gorb, S.N. Arcus as a tensegrity structure in the arolium of wasps (Hymenoptera: Vespidae). Zoology 2002, 105, 225–237. [Google Scholar] [CrossRef]
- Frantsevich, L.; Gorb, S.N. Structure and mechanics of the tarsal chain in the hornet, Vespa crabro (Hymenoptera: Vespidae): Implications on the attachment mechanism. Arthr. Struct. Dev. 2004, 33, 77–89. [Google Scholar] [CrossRef]
- Gladun, D.; Gorb, S.N. Insect walking techniques on thin stems. Arthr. Plant Interact. 2007, 1, 77–91. [Google Scholar] [CrossRef]
- Clemente, C.J.; Federle, W. Pushing versus pulling: Division of labour between tarsal attachment pads in cockroaches. Proc. R. Soc. B 2008, 275, 1329–1336. [Google Scholar] [CrossRef] [PubMed]
- Bußhardt, P.; Gorb, S.N.; Wolf, H. Activity of the claw retractor muscle in stick insects in wall and ceiling situations. J. Exp. Biol. 2011, 214, 1678–1684. [Google Scholar] [CrossRef] [PubMed]
- Labonte, D.; Federle, W. Functionally different pads on the same foot allow control of attachment: Stick insects have load-sensitive “heel” pads for friction and shear-sensitive “toe” pads for adhesion. PLoS ONE 2013, 8, e81943. [Google Scholar] [CrossRef] [PubMed]
- Niederegger, S.; Gorb, S.N. Friction and adhesion in the tarsal and metatarsal scopulae of spiders. J. Comp. Physiol. A 2006, 192, 1223–1232. [Google Scholar]
- Endlein, T.; Federle, W. On heels and toes: How ants climb with adhesive pads and tarsal friction hair arrays. PLoS ONE 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Russell, A.P.; Bauer, A.M.; Laroiya, R. Morphological correlates of the secondarily symmetrical pes of gekkotan lizards. J. Zool. 1997, 241, 767–790. [Google Scholar] [CrossRef]
- Russell, A.P.; Oetelaar, G.S. Limb and digit orientation during vertical clinging in Bibron’s gecko, Chondrodactylus bibronii (A. Smith, 1846) and its bearing on the adhesive capabilities of geckos. Acta Zool. 2015, 97, 345–360. [Google Scholar] [CrossRef]
- Hanna, G.; Barnes, W.J.P. Adhesion and detachment of the toe pads of tree frogs. J. Exp. Biol. 1991, 155, 103–125. [Google Scholar]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Gorb, S.N.; Dai, Z. Control strategies of gecko’s toe in response to reduced gravity. Appl. Sci. 2020, 10, 2257. https://doi.org/10.3390/app10072257
Wang Z, Gorb SN, Dai Z. Control strategies of gecko’s toe in response to reduced gravity. Applied Sciences. 2020; 10(7):2257. https://doi.org/10.3390/app10072257
Chicago/Turabian StyleWang, Zhongyuan, Stanislav N. Gorb, and Zhendong Dai. 2020. "Control strategies of gecko’s toe in response to reduced gravity" Applied Sciences 10, no. 7: 2257. https://doi.org/10.3390/app10072257
APA StyleWang, Z., Gorb, S. N., & Dai, Z. (2020). Control strategies of gecko’s toe in response to reduced gravity. Applied Sciences, 10(7), 2257. https://doi.org/10.3390/app10072257