Advances in Micromanipulation Actuated by Vibration-Induced Acoustic Waves and Streaming Flow



Abstract
1. Introduction

2. Forces Induced by Acoustic Wave and Streaming Flow
2.1. Acoustic Radiation Force on the Targets
2.2. Force Acting on the Target in Streaming Flow
3. Micromanipulation by Vibration-Induced Acoustic Wave
3.1. Manipulation by SAW
3.1.1. TSAW Devices
3.1.2. SSAW Devices
3.2. Manipulation by BAW
3.2.1. UTW Devices (Ultrasonic Acoustic Beam Tweezers)
3.2.2. USW Devices (Ultrasonic Transducers Array)
4. Micromanipulation by Vibration-Induced Steaming Flow
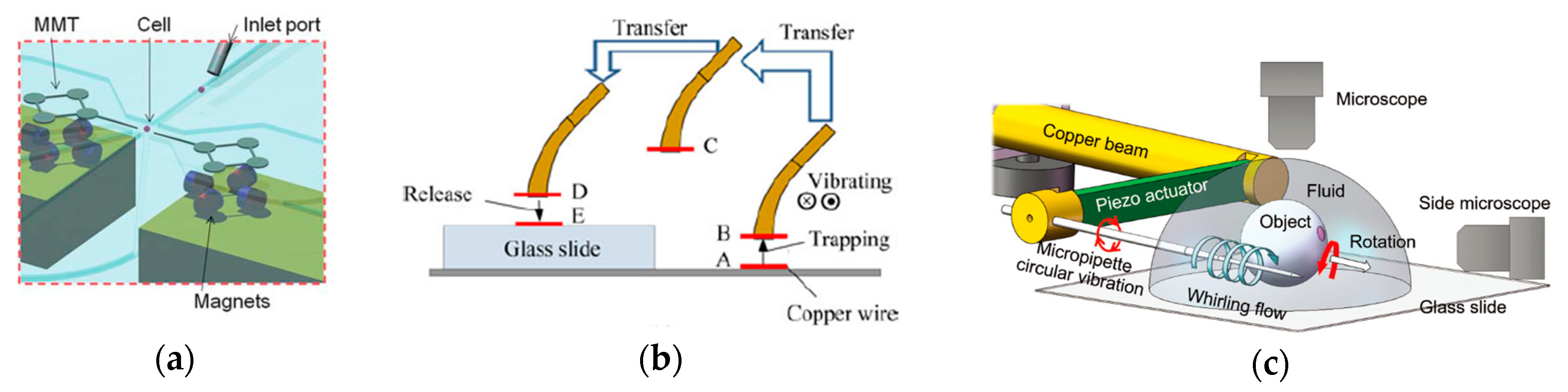
4.1. Vibrated Needles
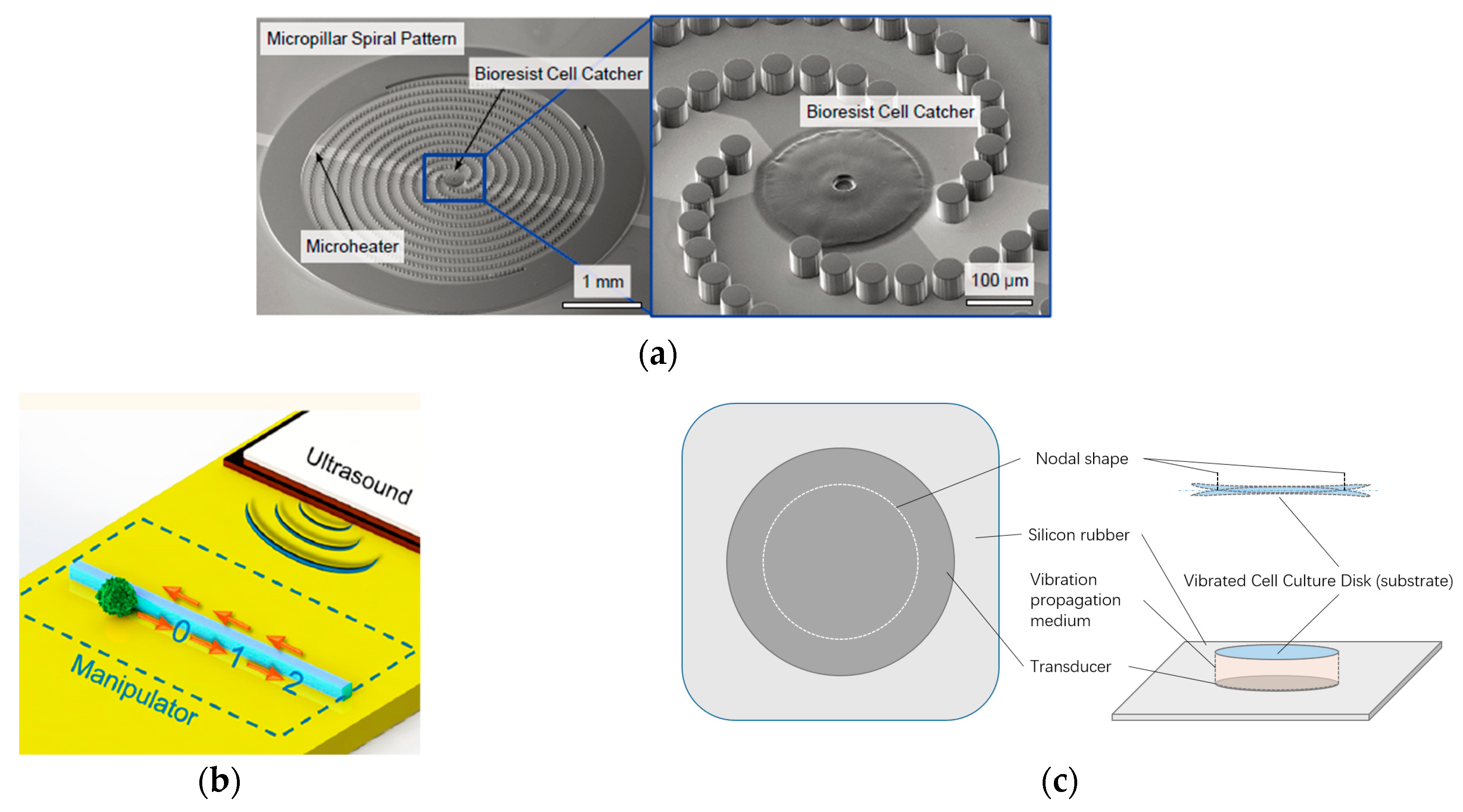
4.2. Vibrated Geometric Substrates
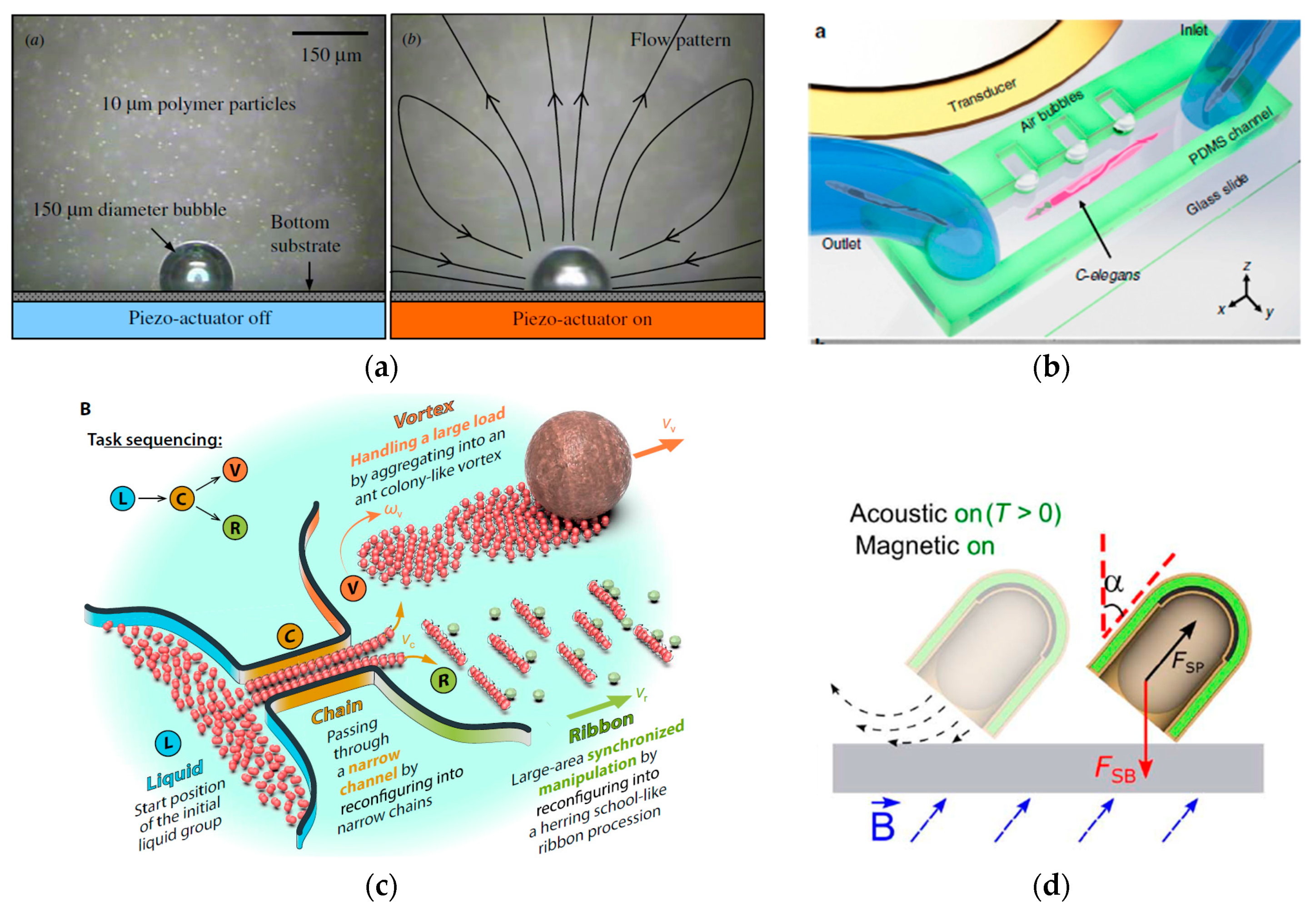
4.3. Vibrated Microbubbles and Microrobots

5. Discussion and Future Prospects
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, M.B.; Oddershede, L.; Siegumfeldt, H. Optical Tweezers Cause Physiological Damage to Escherichia coli and Listeria Bacteria. Appl. Environ. Microbiol. 2008, 74, 2441–2446. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.-C.S.; Mao, X.; Huang, T.J. Surface acoustic wave (SAW) acoustophoresis: now and beyond. Lab on a Chip 2012, 12, 2766–2770. [Google Scholar] [CrossRef] [PubMed]
- Alexey, S.; Aranson, I.S. Magnetic manipulation of self-assembled colloidal asters. Nature Mater. 2011, 10, 698–703. [Google Scholar] [CrossRef]
- Gascoyne, P.R.C.; Wang, W.; Huang, Y.; Becker, F.F. Dielectrophoretic separation of cancer cells from blood. In Proceedings of the IAS ’95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 8–12 October 1995; Volume 1362, pp. 1366–1373. [Google Scholar]
- Ohta, A.; Chiou, P.-Y.; Han, T.; Liao, J.; Bhardwaj, U.; McCabe, E.; Yu, F.; Sun, R.; Wu, M. Dynamic Cell and Microparticle Control via Optoelectronic Tweezers. Microelectromech. Syst. J. 2007, 169, 491–499. [Google Scholar] [CrossRef]
- Marzo, A.; Drinkwater, B.W. Holographic acoustic tweezers. Proc. Nat. Acad. Sci. 2019, 116, 84–89. [Google Scholar] [CrossRef]
- Neuman, K.C.; Lionnet, T.; Allemand, J.-F. Single-Molecule Micromanipulation Techniques. Ann. Rev. Mater. Res. 2007, 37, 33–67. [Google Scholar] [CrossRef]
- Shi, C.; Luu, D.K.; Yang, Q.; Liu, J.; Chen, J.; Ru, C.; Xie, S.; Luo, J.; Ge, J.; Sun, Y. Recent advances in nanorobotic manipulation inside scanning electron microscopes. Microsyst. Nanoeng. 2016, 2, 16024. [Google Scholar] [CrossRef]
- Fakhfouri, A.; Devendran, C.; Ahmed, A.; Soria, J.; Neild, A. The size dependant behaviour of particles driven by a travelling surface acoustic wave (TSAW). Lab on a Chip 2018, 18, 3926–3938. [Google Scholar] [CrossRef]
- Beyer, R.T. Radiation pressure—the history of mislabeled tensor. J. Acoust. Soc. Am. 1976, 60, S21. [Google Scholar] [CrossRef]
- Lighthill, S.J. Acoustic streaming. J. Sound Vib. 1978, 61, 391–418. [Google Scholar] [CrossRef]
- Guo, F.; Li, P.; French, J.B.; Mao, Z.; Zhao, H.; Li, S.; Nama, N.; Fick, J.R.; Benkovic, S.J.; Huang, T.J. Controlling cell–cell interactions using surface acoustic waves. Proc. Nat. Acad. Sci. 2015, 112, 43–48. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Wang, H.; Demore, C.E.M.; Hughes, D.A.; Glynne-Jones, P.; Gebhardt, S.; Bolhovitins, A.; Poltarjonoks, R.; Weijer, K.; Schönecker, A.; et al. Acoustic Devices for Particle and Cell Manipulation and Sensing. Sensors 2014, 14, 14806–14838. [Google Scholar] [CrossRef] [PubMed]
- Kozuka, T.; Tuziuti, T.; Mitome, H.; Fukuda, T. Acoustic micromanipulation using a multi-electrode transducer. In Proceedings of the MHS’96 Proceedings of the Seventh International Symposium on Micro Machine and Human Science, Nagoya, Japan, 2–4 October 1996; pp. 163–170. [Google Scholar]
- Franke, T.; Braunmüller, S.; Schmid, L.; Wixforth, A.; Weitz, D.A. Surface acoustic wave actuated cell sorting (SAWACS). Lab on a Chip 2010, 10, 789–794. [Google Scholar] [CrossRef] [PubMed]
- Fakhfouri, A.; Devendran, C.; Collins, D.J.; Ai, Y.; Neild, A. Virtual membrane for filtration of particles using surface acoustic waves (SAW). Lab on a Chip 2016, 16, 3515–3523. [Google Scholar] [CrossRef] [PubMed]
- Baudoin, M.; Gerbedoen, J.-C.; Riaud, A.; Matar, O.B.; Smagin, N.; Thomas, J.-L. Folding a focalized acoustical vortex on a flat holographic transducer: Miniaturized selective acoustical tweezers. Sci. Adv. 2019, 5, eaav1967. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Teh, S.-Y.; Lee, A.; Kim, H.H.; Lee, C.; Shung, K.K. Single beam acoustic trapping. Appl. Phys. Lett. 2009, 95, 073701. [Google Scholar] [CrossRef]
- Valverde, J.M. Pattern-formation under acoustic driving forces. Contemp. Phys. 2015, 56, 338–358. [Google Scholar] [CrossRef]
- Collins, D.J.; Morahan, B.; Garcia-Bustos, J.; Doerig, C.; Plebanski, M.; Neild, A. Two-dimensional single-cell patterning with one cell per well driven by surface acoustic waves. Nat. Commun. 2015, 6, 8686. [Google Scholar] [CrossRef]
- Caleap, M.; Drinkwater, B.W. Acoustically trapped colloidal crystals that are reconfigurable in real time. Proc. Nat. Acad. Sci. 2014, 111, 6226–6230. [Google Scholar] [CrossRef]
- Brenker, J.C.; Collins, D.J.; Van Phan, H.; Alan, T.; Neild, A. On-chip droplet production regimes using surface acoustic waves. Lab on a Chip 2016, 16, 1675–1683. [Google Scholar] [CrossRef] [PubMed]
- Sesen, M.; Alan, T.; Neild, A. Microfluidic on-demand droplet merging using surface acoustic waves. Lab on a Chip 2014, 14, 3325–3333. [Google Scholar] [CrossRef] [PubMed]
- Hahn, P.; Leibacher, I.; Baasch, T.; Dual, J. Numerical simulation of acoustofluidic manipulation by radiation forces and acoustic streaming for complex particles. Lab on a Chip 2015, 15, 4302–4313. [Google Scholar] [CrossRef] [PubMed]
- Glynne-Jones, P.; Demore, C.E.M.; Ye, C.; Qiu, Y.; Cochran, S.; Hill, M. Array-controlled ultrasonic manipulation of particles in planar acoustic resonator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1258–1266. [Google Scholar] [CrossRef]
- Qiu, Y.; Wang, H.; Gebhardt, S.; Bolhovitins, A.; Démoré, C.E.M.; Schönecker, A.; Cochran, S. Screen-printed ultrasonic 2-D matrix array transducers for microparticle manipulation. Ultrasonics 2015, 62, 136–146. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Fukuda, T.; Huang, Q.; Arai, T. Multifunctional Noncontact Micromanipulation Using Whirling Flow Generated by Vibrating a Single Piezo Actuator. Small 2019, 15, 1804421. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Kojima, M.; Wang, H.; Sun, T.; Mae, Y.; Huang, Q.; Arai, T.; Fukuda, T. Non-contact high-speed rotation of micro targets by vibration of single piezoelectric actuator. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1564–1569. [Google Scholar]
- Li, N.; Hu, J.; Li, H.; Bhuyan, S.; Zhou, Y. Mobile acoustic streaming based trapping and 3-dimensional transfer of a single nanowire. Appl. Phys. Lett. 2012, 101, 093113. [Google Scholar] [CrossRef]
- Chung, S.K.; Cho, S.K. On-chip manipulation of objects using mobile oscillating bubbles. J. Micromech. Microeng. 2008, 18, 125024. [Google Scholar] [CrossRef]
- Lutz, B.R.; Chen, J.; Schwartz, D.T. Microfluidics without microfabrication. Proc. Nat. Acad. Sci. 2003, 100, 4395–4398. [Google Scholar] [CrossRef]
- Mobadersany, N.; Sarkar, K. Acoustic microstreaming near a plane wall due to a pulsating free or coated bubble: velocity, vorticity and closed streamlines. J. Fluid Mech. 2019, 875, 781–806. [Google Scholar] [CrossRef]
- Tho, P.; Manasseh, R.; Ooi, A. Cavitation microstreaming patterns in single and multiple bubble systems. J. Fluid Mech. 2007, 576, 191–233. [Google Scholar] [CrossRef]
- Combriat, T.; Mekki-Berrada, F.; Thibault, P.; Marmottant, P. Trapping and exclusion zones in complex streaming patterns around a large assembly of microuidic bubbles under ultrasound. Phys. Rev. Fluids 2018, 3. [Google Scholar] [CrossRef]
- Xie, Y.; Zhao, C. An optothermally generated surface bubble and its applications. Nanoscale 2017, 9, 6622–6631. [Google Scholar] [CrossRef]
- Lord Rayleigh, J.W.S.I. On the circulation of air observed in Kundt’s tubes, and on some allied acoustical problems. Philos. Trans. Royal Soc. London 1884, 175, 1–21. [Google Scholar] [CrossRef]
- Lord Rayleigh, J.W.S., IX. On the compressibility of gases between one atmosphere and half an atmosphere of pressure. Philos. Trans. R. Soc. London Series A Contain. Papers A Math. Phys. Character 1905, 204, 351–372. [Google Scholar] [CrossRef][Green Version]
- Gor’kov, L. On the Forces Acting on a Small Particle in an Acoustic Field in an Ideal Fluid. Soviet Phys. Doklady 1962, 6, 773. [Google Scholar]
- Glynne-Jones, P.; Boltryk, R.J.; Hill, M. Chapter 7 Modelling and Applications of Planar Resonant Devices for Acoustic Particle Manipulation. In Microscale Acoustofluidics; The Royal Society of Chemistry: Cambridge, UK, 2015; pp. 127–147. [Google Scholar]
- Drinkwater, B.W. Dynamic-field devices for the ultrasonic manipulation of microparticles. Lab on a Chip 2016, 16, 2360–2375. [Google Scholar] [CrossRef]
- Skowronek, V.; Rambach, R.W.; Schmid, L.; Haase, K.; Franke, T. Particle Deflection in a Poly(dimethylsiloxane) Microchannel Using a Propagating Surface Acoustic Wave: Size and Frequency Dependence. Anal. Chem. 2013, 85, 9955–9959. [Google Scholar] [CrossRef]
- Hasegawa, T.; Hino, Y.; Annou, A.; Noda, H.; Kato, M.; Inoue, N. Acoustic radiation pressure acting on spherical and cylindrical shells. J. Acoust. Soc. Am. 1993, 93, 154–161. [Google Scholar] [CrossRef]
- Hasegawa, T.; Yosioka, K. Acoustic-Radiation Force on a Solid Elastic Sphere. J. Acoust. Soc. Am. 1969, 46, 1139–1143. [Google Scholar] [CrossRef]
- Collins, D.J.; Ma, Z.; Han, J.; Ai, Y. Continuous micro-vortex-based nanoparticle manipulation via focused surface acoustic waves. Lab on a Chip 2017, 17, 91–103. [Google Scholar] [CrossRef] [PubMed]
- Gendelman, O.V.; Vakakis, A.F. Introduction to a topical issue ‘nonlinear energy transfer in dynamical and acoustical Systems’. Philos. Trans. A 2018, 376, 20170129. [Google Scholar] [CrossRef] [PubMed]
- Erbaş, A.; Podgornik, R.; R Netz, R. Viscous compressible hydrodynamics at planes, spheres and cylinders with finite surface slip. Eur. Phys. J. E Soft Matter. 2010, 32, 147–164. [Google Scholar] [CrossRef]
- Manor, O.; Rezk, A.R.; Friend, J.R.; Yeo, L.Y. Dynamics of liquid films exposed to high-frequency surface vibration. Phys. Rev. E 2015, 91, 053015. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, T.; Hirano, M.; Tanabe, F.; Kamo, H. The effect of the virtual mass force term on the numerical stability and efficiency of system calculations. Nucl. Eng. Design 1990, 120, 181–192. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, C.; Guo, F.; Philippe, J.; Gu, Y.; Tian, Z.; Bachman, H.; Ren, L.; Yang, S.; Zhong, Z.; et al. Contactless, programmable acoustofluidic manipulation of objects on water. Lab on a Chip 2019, 19. [Google Scholar] [CrossRef]
- Ding, X.; Lin, S.-C.S.; Kiraly, B.; Yue, H.; Li, S.; Chiang, I.-K.; Shi, J.; Benkovic, S.J.; Huang, T.J. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Nat. Acad. Sci. 2012, 109, 11105–11109. [Google Scholar] [CrossRef]
- Guo, F.; Mao, Z.; Chen, Y.; Xie, Z.; Lata, J.P.; Li, P.; Ren, L.; Liu, J.; Yang, J.; Dao, M.; et al. Three-dimensional manipulation of single cells using surface acoustic waves. Proc. Nat. Acad. Sci. 2016, 113, 1522–1527. [Google Scholar] [CrossRef]
- Chen, Y.; Ding, X.; Steven Lin, S.-C.; Yang, S.; Huang, P.-H.; Nama, N.; Zhao, Y.; Nawaz, A.A.; Guo, F.; Wang, W.; et al. Tunable Nanowire Patterning Using Standing Surface Acoustic Waves. ACS Nano 2013, 7, 3306–3314. [Google Scholar] [CrossRef]
- Ng, J.W.; Devendran, C.; Neild, A. Acoustic tweezing of particles using decaying opposing travelling surface acoustic waves (DOTSAW). Lab on a Chip 2017, 17. [Google Scholar] [CrossRef]
- Wu, M.; Chen, C.; Wang, Z.; Bachman, H.; Ouyang, Y.; Huang, P.-H.; Sadovsky, Y.; Huang, T.J. Separating extracellular vesicles and lipoproteins via acoustofluidics. Lab on a Chip 2019, 19, 1174–1182. [Google Scholar] [CrossRef] [PubMed]
- Wu, J. Acoustical tweezers. J. Acoust. Soc. Am. 1991, 89, 2140–2143. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Ha, K.; Shung, K.K. A theoretical study of the feasibility of acoustical tweezers: Ray acoustics approach. J. Acoust. Soc. Am. 2005, 117, 3273–3280. [Google Scholar] [CrossRef] [PubMed]
- Baresch, D.; Thomas, J.-L.; Marchiano, R. Observation of a Single-Beam Gradient Force Acoustical Trap for Elastic Particles: Acoustical Tweezers. Phys. Rev. Lett. 2014. [Google Scholar] [CrossRef]
- Baresch, D.; Marchiano, R.; Thomas, J.-L. Orbital Angular Momentum Transfer to Stably Trapped Elastic Particles in Acoustical Vortex Beams. Phys. Rev. Lett. 2018, 121. [Google Scholar] [CrossRef]
- Baresch, D.; Thomas, J.-L.; Marchiano, R. Three-dimensional Acoustic Radiation Force on an Arbitrarily Located Elastic Sphere. J. Acoust. Soc. Am. 2013, 133, 25–36. [Google Scholar] [CrossRef]
- Marzo, A.; Seah, S.A.; Drinkwater, B.W.; Sahoo, D.R.; Long, B.; Subramanian, S. Holographic acoustic elements for manipulation of levitated objects. Nature Commun. 2015, 6, 8661. [Google Scholar] [CrossRef]
- Fushimi, T.; Marzo, A.; Drinkwater, B.W.; Hill, T.L. Acoustophoretic volumetric displays using a fast-moving levitated particle. Appl. Phys. Lett. 2019, 115, 064101. [Google Scholar] [CrossRef]
- Tang, Q.; Liu, P.; Hu, J. Analyses of acoustofluidic field in ultrasonic needle–liquid–substrate system for micro-/nanoscale material concentration. Microfluidics Nanofluidics 2018, 22, 46. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Arai, F. Local streamline generation by mechanical oscillation in a microfluidic chip for noncontact cell manipulations. Appl. Phys. Lett. 2012, 101, 074102. [Google Scholar] [CrossRef]
- Hagiwara, M.; Kawahara, T.; Yamanishi, Y.; Masuda, T.; Feng, L.; Arai, F. On-chip magnetically actuated robot with ultrasonic vibration for single cell manipulations. Lab on a Chip 2011, 11, 2049–2054. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Li, N.; Hu, J. Capture of Individual Micrometal Wires in Air by Ultrasonic Tweezers. IEEE/ASME Trans. Mech. 2015, 20, 3053–3059. [Google Scholar] [CrossRef]
- Liu, X.; Shi, Q.; Lin, Y.; Kojima, M.; Mae, Y.; Huang, Q.; Fukuda, T.; Arai, T. Hydrodynamic Tweezers: Trapping and Transportation in Microscale Using Vortex Induced by Oscillation of a Single Piezoelectric Actuator. Sensors 2018, 18, 2002. [Google Scholar] [CrossRef]
- Hu, J.; Ong, L.; Yeo, C.; Liu, Y. Trapping, transportation and separation of small particles by an acoustic needle. Sens. Actuators A Phys. 2007, 138, 187–193. [Google Scholar] [CrossRef]
- Hayakawa, T.; Akita, Y.; Arai, F. Parallel trapping of single motile cells based on vibration-induced flow. Microfluidics Nanofluidics 2018, 22, 42. [Google Scholar] [CrossRef]
- Hayakawa, T.; Sakuma, S.; Fukuhara, T.; Yokoyama, Y.; Arai, F. A Single Cell Extraction Chip Using Vibration-Induced Whirling Flow and a Thermo-Responsive Gel Pattern. Micromachines 2014, 5, 681–696. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, K.; Liu, W.; Yang, D.; Shen, H.; Peng, H.; Guo, X.; Li, J.; Wang, J. A Human Microrobot Interface Based on Acoustic Manipulation. ACS Nano 2019. [Google Scholar] [CrossRef]
- Imashiro, C.; Kurashina, Y.; Takemura, K.; Miyata, S.; Komotori, J. Cell manipulation by nodal circle resonance vibration of a cell cultivation substrate. In Proceedings of the 2015 IEEE International Ultrasonics Symposium (IUS), Taipei, Taiwan, 21–24 October 2015; pp. 1–4. [Google Scholar]
- Imashiro, C.; Kurashina, Y.; Kuribara, T.; Hirano, M.; Totani, K.; Takemura, K. Cell Patterning Method on a Clinically Ubiquitous Culture Dish Using Acoustic Pressure Generated From Resonance Vibration of a Disk-Shaped Ultrasonic Transducer. IEEE Trans. Biomed. Eng. 2019, 66, 111–118. [Google Scholar] [CrossRef]
- Fan, Q.; Hu, W.; Ohta, A.T. Efficient single-cell poration by microsecond laser pulses. Lab on a Chip 2015, 15, 581–588. [Google Scholar] [CrossRef]
- Hu, W.; Fan, Q.; Ohta, A. An Opto-Thermocapillary Cell Micromanipulator. Lab on a chip 2013, 13. [Google Scholar] [CrossRef]
- Rahman, M.A.; Cheng, J.; Wang, Z.; Ohta, A.T. Cooperative Micromanipulation Using the Independent Actuation of Fifty Microrobots in Parallel. Sci. Rep. 2017, 7, 3278. [Google Scholar] [CrossRef] [PubMed]
- Läubli, N.; Shamsudhin, N.; Vogler, H.; Munglani, G.; Grossniklaus, U.; Ahmed, D.; Nelson, B. 3D Manipulation and Imaging of Plant Cells using Acoustically Activated Microbubbles. Small Methods 2019, 1800527. [Google Scholar] [CrossRef]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 11085. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Liu, J.; Huang, C.; Su, M.; Xu, T. 3-D Path Following of Helical Microswimmers With an Adaptive Orientation Compensation Model. IEEE Trans. Auto. Sci. Eng. 2019, 1–10. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Vong, C.; Wang, B.; Wu, X.; Zhang, L. Dynamic Morphology and Swimming Properties of Rotating Miniature Swimmers With Soft Tails. IEEE/ASME Trans. Mech. 2019, 24, 924–934. [Google Scholar] [CrossRef]
- Xinjian, F.; Mengmeng, S.; Zhihua, L.; Jianmin, S.; He, Q.; Sun, L.; Xie, H. Automated Noncontact Micromanipulation Using Magnetic Swimming Microrobots. IEEE Trans. Nanotechnol. 2018, 17, 666–669. [Google Scholar]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable magnetic microrobot swarm: Multimode transformation, locomotion, and manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]
- Ren, L.; Nama, N.; McNeill, J.M.; Soto, F.; Yan, Z.; Liu, W.; Wang, W.; Wang, J.; Mallouk, T.E. 3D steerable, acoustically powered microswimmers for single-particle manipulation. Sci. Adv. 2019, 5, eaax3084. [Google Scholar] [CrossRef]
- Greenhall, J.; Vasquez, F.G.; Raeymaekers, B. Ultrasound directed self-assembly of user-specified patterns of nanoparticles dispersed in a fluid medium. Appl. Phys. Lett. 2016, 108, 103103. [Google Scholar] [CrossRef]
- Glynne-Jones, P.; Hill, M. Acoustofluidics 23: Acoustic manipulation combined with other force fields. Lab Chip 2013, 13. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, F.; Zhao, J.; Talaat, W.; Soto, F.; Karshalev, E.; Chen, C.; Hu, Z.; Lu, X.; Li, J.; et al. Structure-Dependent Optical Modulation of Propulsion and Collective Behavior of Acoustic/Light-Driven Hybrid Microbowls. Adv. Funct. Mater. 2019, 29, 1809003. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Function | Particles | Size (μm) | Freq. 3 (MHz) | Acous 4 Wave Form | Power (mW) |
|---|---|---|---|---|---|---|---|
| Ding et al. [51] | 2012 | Transport | Bovine RBC 1 | 6 | 18.5–37 | SSAW | 320 |
| PS 2 | 10 | ||||||
| Guo et al. [13,52] | 2014 | Transport and rotation | HEK 293T, HeLa, and HMVEC | ~15 | 13.35–13.45 | SSAW | 10–30 |
| Collins et al. [45] | 2017 | Transport | PS | 0.1–0.3 | 633 | TSAW | 126–251 |
| Fakhfouri et al. [10] | 2018 | Swirling, transport, and patterning | PS | 0.1–6 | 155 | TSAW | 320 |
| Chen et al. [53] | 2013 | Patterning | Silver nanowires | Φ 0.06, Length 40 | 12.6 | SSAW | 10–250 |
| Collins et al. [21] | 2015 | 2D capture and patterning | Human LYMPH | 6–10 | 101–229 | SSAW | 220–520 |
| Human RBC | 6.5 | ||||||
| PS | 5.1–10 | ||||||
| Fakhfouri et al. [17] | 2016 | Sorting | PS | 5–10.36 | 129.5–258 | TSAW | >43.4 |
| Ng et al. [54] | 2017 | Sorting | PS | 5–10 | 75.8–76.2 | TSAW | 508–1040 |
| Wu et al. [55] | 2019 | Sorting | Extracellular vesicles and lipoproteins | 0.04–2 | ~20 | SSAW | Input voltage 20–40 Vpp |
| Brenker et al. [23] | 2016 | Droplet generation | Water-in-oil droplet | >200 fL | 129 | TSAW | 1500 |
| Sesen et al. [24] | 2014 | Droplet merging | Water-in-oil droplet | 100–150 | 48.5 | TSAW | 500–2500 |
| Zhang et al. [50] | 2019 | Patterning, transport, trapping, and droplet transport | PS, zebrafish larvae, water-in-oil droplet | 10–1000 | 24–24.2 | TSAW and SSAW | 630–5000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Liu, X.; Kojima, M.; Huang, Q.; Arai, T. Advances in Micromanipulation Actuated by Vibration-Induced Acoustic Waves and Streaming Flow. Appl. Sci. 2020, 10, 1260. https://doi.org/10.3390/app10041260
Chen Z, Liu X, Kojima M, Huang Q, Arai T. Advances in Micromanipulation Actuated by Vibration-Induced Acoustic Waves and Streaming Flow. Applied Sciences. 2020; 10(4):1260. https://doi.org/10.3390/app10041260
Chicago/Turabian StyleChen, Zhuo, Xiaoming Liu, Masaru Kojima, Qiang Huang, and Tatsuo Arai. 2020. "Advances in Micromanipulation Actuated by Vibration-Induced Acoustic Waves and Streaming Flow" Applied Sciences 10, no. 4: 1260. https://doi.org/10.3390/app10041260
APA StyleChen, Z., Liu, X., Kojima, M., Huang, Q., & Arai, T. (2020). Advances in Micromanipulation Actuated by Vibration-Induced Acoustic Waves and Streaming Flow. Applied Sciences, 10(4), 1260. https://doi.org/10.3390/app10041260