A Noniterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissues †


Abstract
Featured Application
Abstract
1. Introduction
2. Related Works
3. Noniterative Simultaneous Rigid Registration Method (NSRR)
3.1. Problem Definition
3.2. Decoupling Rotation from Translation
3.3. Estimation of Rotation Matrix
3.4. Estimation of the Translation Vector
3.5. Algorithm Workflow
| Algorithm 1: Non-iterative Simultaneous Rigid Registration (NSRR). |
| Input: original serial section images |
| 1: ⟵ landmarks of () |
| 2: ⟵ centralized () |
| 3: ⟵ () |
| 4: ,, ⟵ SVD of () |
| 5: ⟵ () |
| 6: ⟵ solution of Equation (5) () |
| 7: ⟵ () |
| 8: ⟵ () |
| 9: ⟵ , ⟵ () |
| 10: ⟵ () |
| 11: ⟵ () |
| 12: ⟵ , ⟵ () |
| 13: ⟵ transformed by and () |
| Output: registered serial section images |
3.6. Optimality Conditions
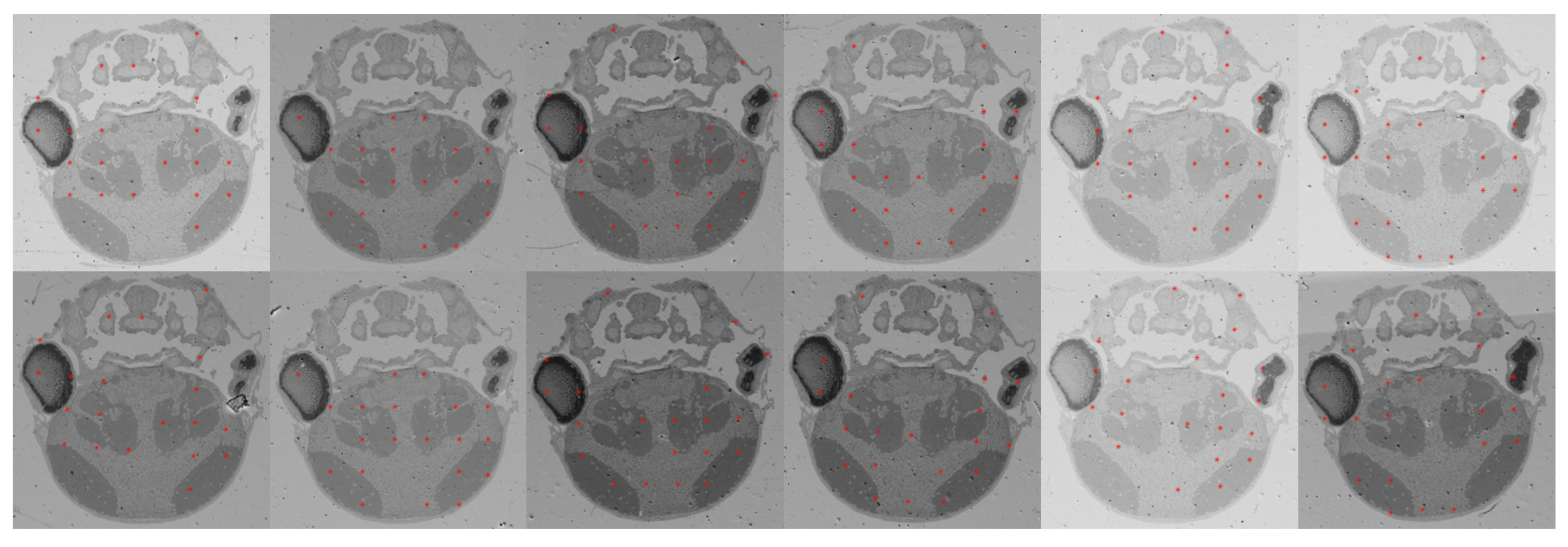
4. Experiments
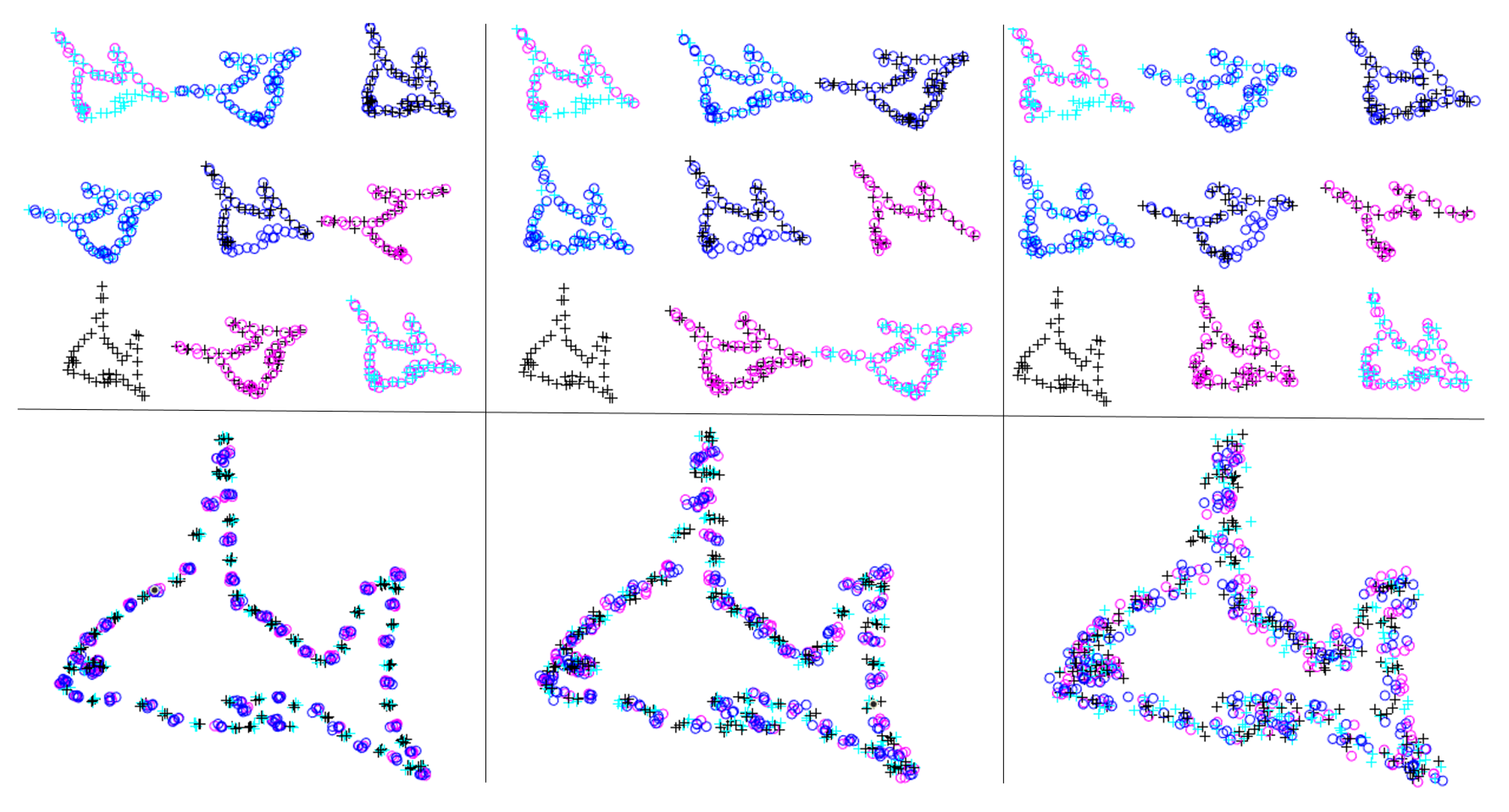
4.1. Robustness Test
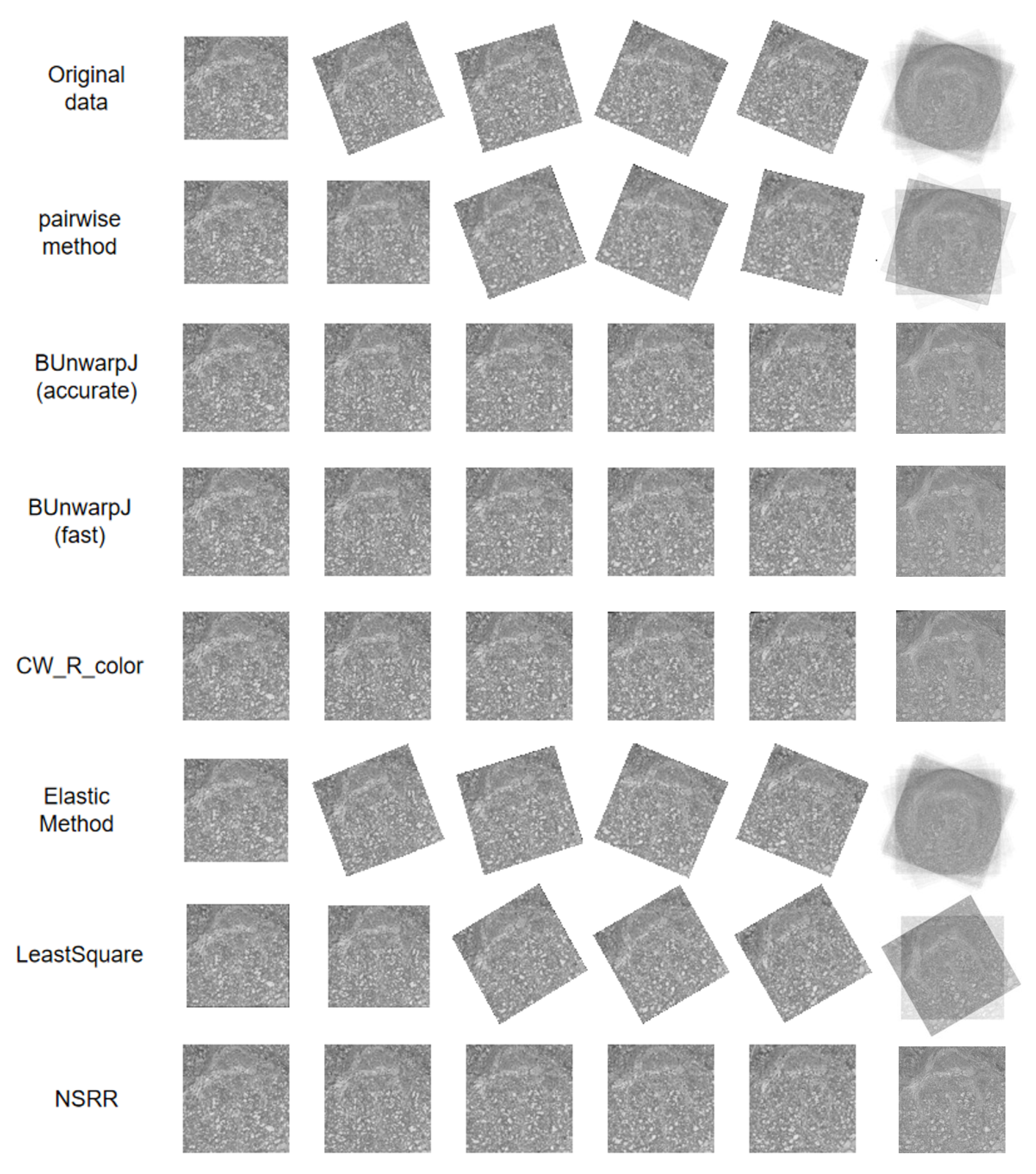
4.2. Comparison with State-of-the-Art Methods
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proofs
References
- Briggman, K.L.; Bock, D.D. Volume electron microscopy for neuronal circuit reconstruction. Curr. Opin. Neurobiol. 2012, 22, 154–161. [Google Scholar] [CrossRef] [PubMed]
- Helmstaedter, M. Cellular-resolution connectomics: Challenges of dense neural circuit reconstruction. Nat. Methods 2013, 10, 501–507. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.W.; Gosno, E.B.; Li, Y.S. Fully automatic and robust 3D registration of serial-section microscopic images. Sci. Rep. 2015, 5, 15051. [Google Scholar] [CrossRef] [PubMed]
- Rossetti, B.J.; Wang, F.; Zhang, P.; Teodoro, G.; Brat, D.J.; Kong, J. Dynamic registration for gigapixel serial whole slide images. In Proceedings of the IEEE International Symposium on Biomedical Imaging, Melbourne, Australia, 18–21 April 2017; p. 424. [Google Scholar]
- Ourselin, S.; Roche, A.; Subsol, G.; Pennec, X.; Ayache, N. Reconstructing a 3D structure from serial histological sections. Image Vis. Comput. 2001, 19, 25–31. [Google Scholar] [CrossRef]
- Schmitt, O.; Modersitzki, J.; Heldmann, S.; Wirtz, S.; Fischer, B. Image registration of sectioned brains. Int. J. Comput. Vis. 2007, 73, 5–39. [Google Scholar] [CrossRef]
- Pichat, J.; Modat, M.; Yousry, T.; Ourselin, S. A multi-path approach to histology volume reconstruction. In Proceedings of the IEEE International Symposium on Biomedical Imaging, New York, NY, USA, 16–19 April 2015; pp. 1280–1283. [Google Scholar]
- Schindelin, J.; Arganda-Carreras, I.; Frise, E.; Kaynig, V.; Longair, M.; Pietzsch, T.; Preibisch, S.; Rueden, C.; Saalfeld, S.; Schmid, B.; et al. Fiji: An open-source platform for biological-image analysis. Nat. Methods 2012, 9, 676. [Google Scholar] [CrossRef] [PubMed]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Arganda-Carreras, I.; Sorzano, C.O.; Marabini, R.; Carazo, J.M.; Ortiz-de Solorzano, C.; Kybic, J. Consistent and elastic registration of histological sections using vector-spline regularization. In Proceedings of the International Workshop on Computer Vision Approaches to Medical Image Analysis, Graz, Austria, 12 May 2006; pp. 85–95. [Google Scholar]
- Wang, C.W.; Ka, S.M.; Chen, A. Robust image registration of biological microscopic images. Sci. Rep. 2014, 4, 6050. [Google Scholar] [CrossRef] [PubMed]
- Saalfeld, S.; Fetter, R.; Cardona, A.; Tomancak, P. Elastic volume reconstruction from series of ultra-thin microscopy sections. Nat. Methods 2012, 9, 717–720. [Google Scholar] [CrossRef] [PubMed]
- Jaderberg, M.; Simonyan, K.; Zisserman, A. Spatial transformer networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; pp. 2017–2025. [Google Scholar]
- Shu, C.; Chen, X.; Xie, Q.; Han, H. An unsupervised network for fast microscopic image registration. In Proceedings of the Medical Imaging 2018: Digital Pathology, Houston, TX, USA, 10–15 February 2018; Volume 10581, p. 105811D. [Google Scholar]
- Yoo, I.; Hildebrand, D.G.; Tobin, W.F.; Lee, W.C.A.; Jeong, W.K. ssemnet: Serial-section electron microscopy image registration using a spatial transformer network with learned features. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support; Springer: Berlin/Heidelberg, Germany, 2017; pp. 249–257. [Google Scholar]
- Zhou, S.; Xiong, Z.; Chen, C.; Chen, X.; Liu, D.; Zhang, Y.; Zha, Z.J.; Wu, F. Fast and Accurate Electron Microscopy Image Registration with 3D Convolution. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Shenzhen, China, 13–17 October 2019; pp. 478–486. [Google Scholar]
- Dosovitskiy, A.; Fischer, P.; Ilg, E.; Hausser, P.; Hazirbas, C.; Golkov, V.; Van Der Smagt, P.; Cremers, D.; Brox, T. Flownet: Learning optical flow with convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2758–2766. [Google Scholar]
- Ilg, E.; Mayer, N.; Saikia, T.; Keuper, M.; Dosovitskiy, A.; Brox, T. Flownet 2.0: Evolution of optical flow estimation with deep networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2462–2470. [Google Scholar]
- Sun, D.; Yang, X.; Liu, M.Y.; Kautz, J. PWC-net: CNNs for optical flow using pyramid, warping, and cost volume. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8934–8943. [Google Scholar]
- Liu, C.; Yuen, J.; Torralba, A. Sift flow: Dense correspondence across scenes and its applications. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 978–994. [Google Scholar] [CrossRef] [PubMed]
- Hager, W.W. Updating the Inverse of a Matrix. Siam Rev. 1989, 31, 221–239. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-Squares Fitting of Two 3-D Point Sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 698. [Google Scholar] [CrossRef] [PubMed]
- Knott, G.; Marchman, H.; Wall, D.; Lich, B. Serial section scanning electron microscopy of adult brain tissue using focused ion beam milling. J. Neurosci. 2008, 28, 2959–2964. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | SSIM | Time |
|---|---|---|
| BUnwarpJ(fast) [10] | 0.6523 ± 0.1235 | 3.6 min |
| BUnwarpJ(accurate) [10] | 0.7037 ± 1.2717 | 4.3 min |
| LeastSquare [8] | 0.8046 ± 0.1578 | 11.729 s |
| Elastic Method [12] | 0.6118 ± 0.0968 | 1.4 min |
| CW_R_color [3] | 0.6721 ± 0.9013 | 36.4 min |
| Pairwise method [23] | 0.7331 ± 0.1283 | 0.937 s |
| NSRR (ours) | 0.8297 ± 0.0706 | 0.2813 s |
| Method | EPE | Time |
|---|---|---|
| BUnwarpJ(fast) [10] | 16.6243 | 3.4 min |
| BUnwarpJ(accurate) [10] | 14.3140 | 5.5 min |
| LeastSquare [8] | 15.4013 | 5.462 s |
| Elastic Method [12] | 17.6141 | 10.323 s |
| CW_R_color [3] | 12.7754 | 8.1 min |
| Pairwise method [23] | 14.5277 | 0.368 s |
| NSRR (ours) | 11.1903 | 0.289 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, C.; Li, L.-L.; Li, G.; Chen, X.; Han, H. A Noniterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissues. Appl. Sci. 2020, 10, 1156. https://doi.org/10.3390/app10031156
Shu C, Li L-L, Li G, Chen X, Han H. A Noniterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissues. Applied Sciences. 2020; 10(3):1156. https://doi.org/10.3390/app10031156
Chicago/Turabian StyleShu, Chang, Lin-Lin Li, Guoqing Li, Xi Chen, and Hua Han. 2020. "A Noniterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissues" Applied Sciences 10, no. 3: 1156. https://doi.org/10.3390/app10031156
APA StyleShu, C., Li, L.-L., Li, G., Chen, X., & Han, H. (2020). A Noniterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissues. Applied Sciences, 10(3), 1156. https://doi.org/10.3390/app10031156