A New Cascaded Framework for Lithium-Ion Battery State and Parameter Estimation





Abstract
1. Introduction
- Why is the convergence speed of the battery usable capacity so slow?A similar problem can also be found in other research works such as [2,14], etc. Although they explained that the capacity estimation is faster than the capacity degradation, the slow convergence speed of battery usable capacity in classical monitoring structures, usually several hours, still needs to be explored.
- Why will the smaller initial value of battery usable capacity lead to a rapid convergence speed?As can be observed from Figure 1a–d, although the steady state error was similar for 1 Ah or 2 Ah, the convergence speed of the estimation was faster with the lowest initial value.
- Are there other observability conditions that can guarantee a rapid convergence speed for the battery usable capacity?Based on the above question, how to find the other observability conditions to improve the battery monitoring result is of great importance. Indeed, the convergence rate can be adjusted by varying the process and measurement noise covariance during the observer design process [24]. However, intrinsic characteristics from the battery or the used model should be mastered, whether we can take advantage of them or effectively avoid them.
- How can we improve the battery monitoring performance based on the classical extended ECM, if the answers to the aforementioned questions are found?That is, how can we take advantage of the existing literature, including the validated model and experimental information, to propose a new battery monitoring structure that can overcome the drawbacks of the traditional joint and dual estimation frameworks?
- Thanks to the superposition principle, two sub-models are extracted. For the nonlinear one, an observability analysis is conducted. The local observability for battery ECM parameters and battery usable capacity are analyzed separately.
- The necessary observability conditions for the extended ECM are derived and clearly listed. It shows that the necessary conditions for local observability depend on the battery current value, the initial value of the battery capacity, and the square of the derivative of the OCV with respect to the SOC.
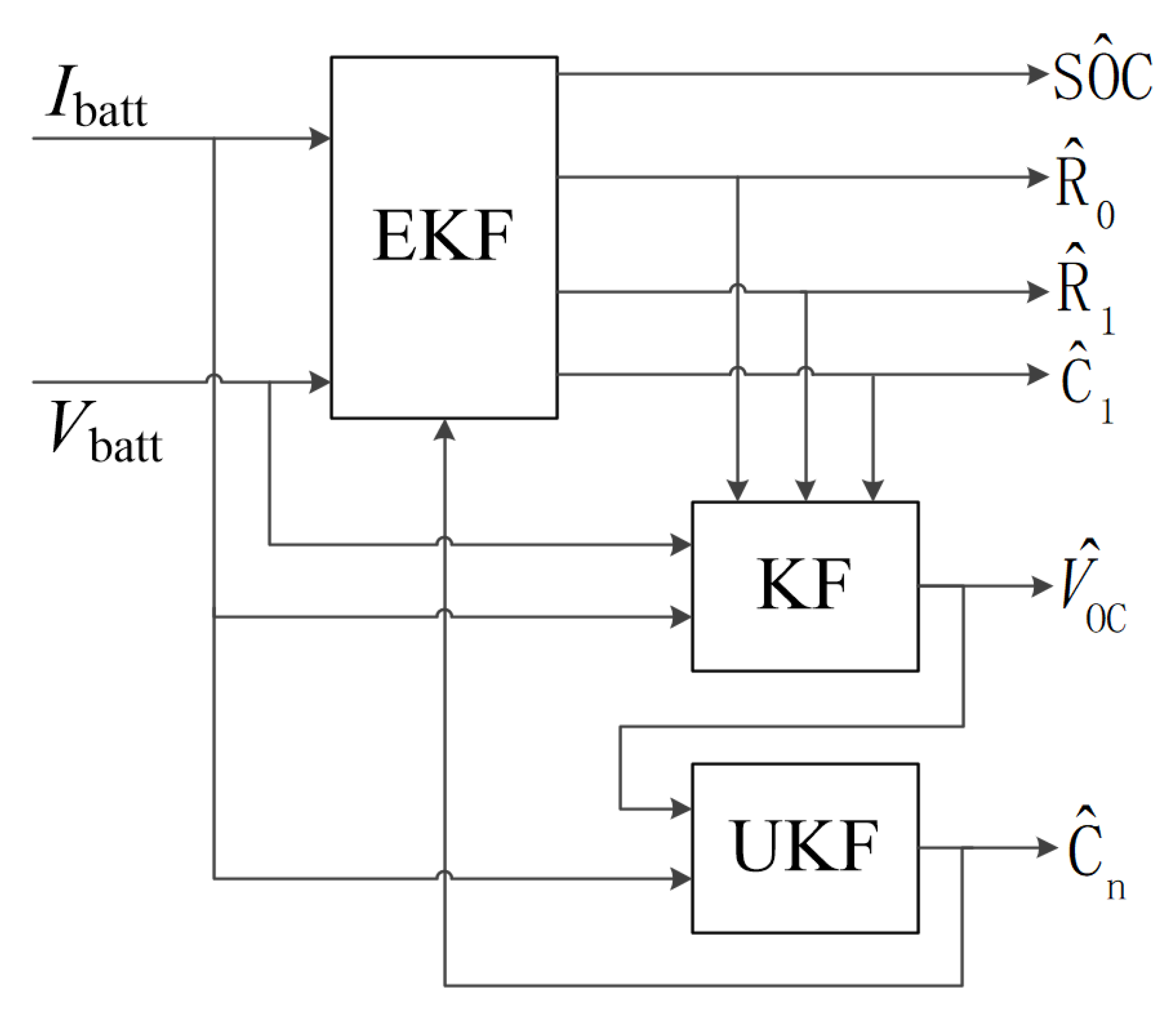
- A new cascaded framework for the LIB state and parameter estimation is proposed based on the obtained theoretical analysis results. The battery ECM parameter estimation and battery capacity estimation are divided into two parts. A simultaneous estimation of OCV will connect these two parts.
- The derived local observability conditions and the new proposed framework extend the traditional battery monitoring study.
2. Battery ECM and Extended Battery ECM
2.1. Battery ECM
2.2. Extended Battery ECM
3. Local Observability Conditions for the Extended Battery ECM
3.1. Battery ECM Decomposition
3.2. Observability Analysis for the Extended Sub-Models
- 1.
- The term induces the inherent weaker observability environment for the battery capacity . Because is usually smaller than one, this means its square is always smaller than itself.
- 2.
- The input appears in the numerator of det(), which means the current value will also affect the observability condition. It has been indicated in [32] that a higher absolute value of the determinant will lead to a better observability. Hence, the larger the current is, the better is the observability condition. However, the selected current level should be adequate, namely it should make a compromise between the convergence speed and the battery high-rate charging current.
- 3.
- As is in the denominator of det(), then its impact cannot be ignored. A very practical problem in reality is how to choose the initial value for the estimation algorithm, namely an initial value that is larger than the reference one or smaller than the reference one, and the reason why we make that decision. With our demonstration, an initial capacity value that is smaller than the reference value is recommended when the battery capacity is estimated under the extended model framework, because this will enhance the observability condition.
4. New Cascaded Framework
4.1. Battery Usable Capacity Estimation
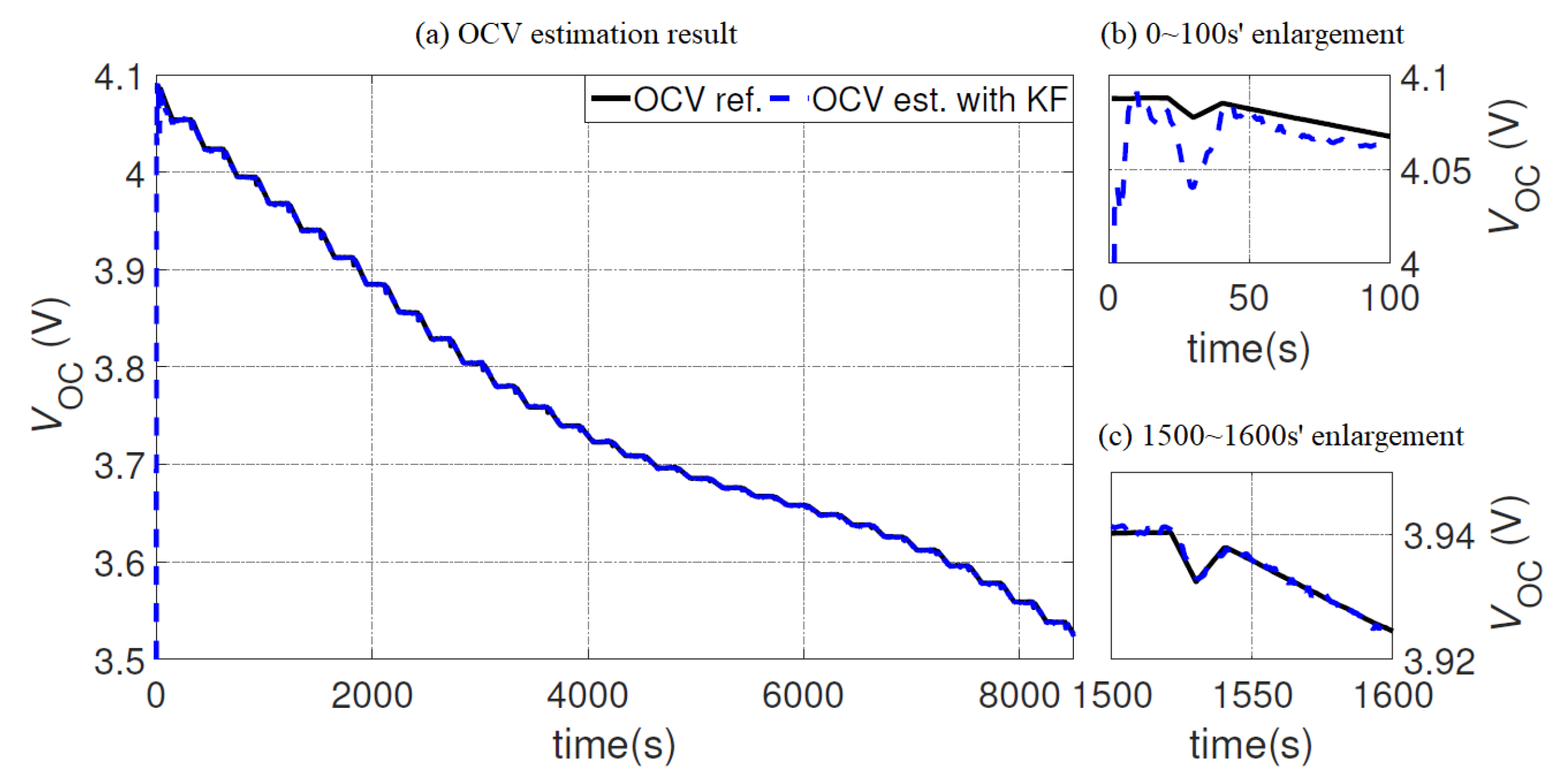
4.2. Battery OCV Estimation
4.3. Battery SOC and ECM Parameter Estimation
5. Simulation Studies
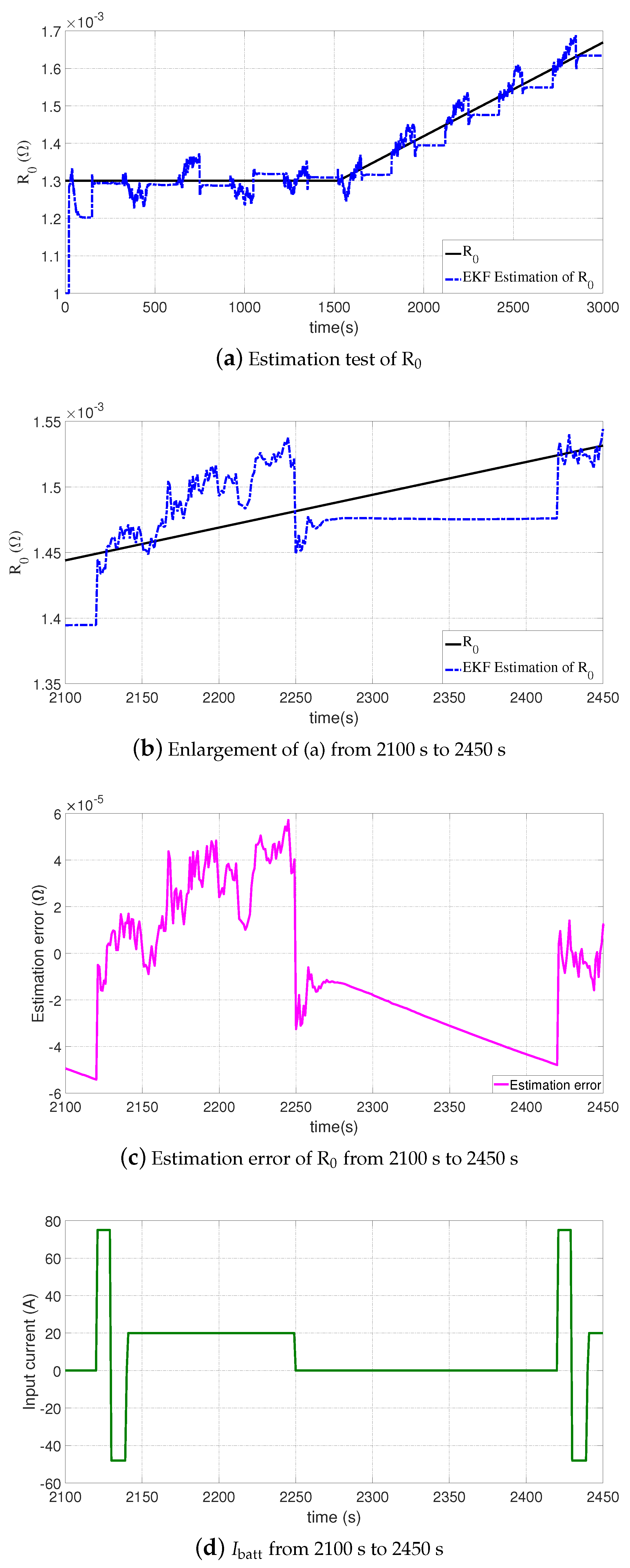
5.1. Observability Conditions’ Assessment
- (variable battery input current)
- Battery input current level
- Initial capacity value
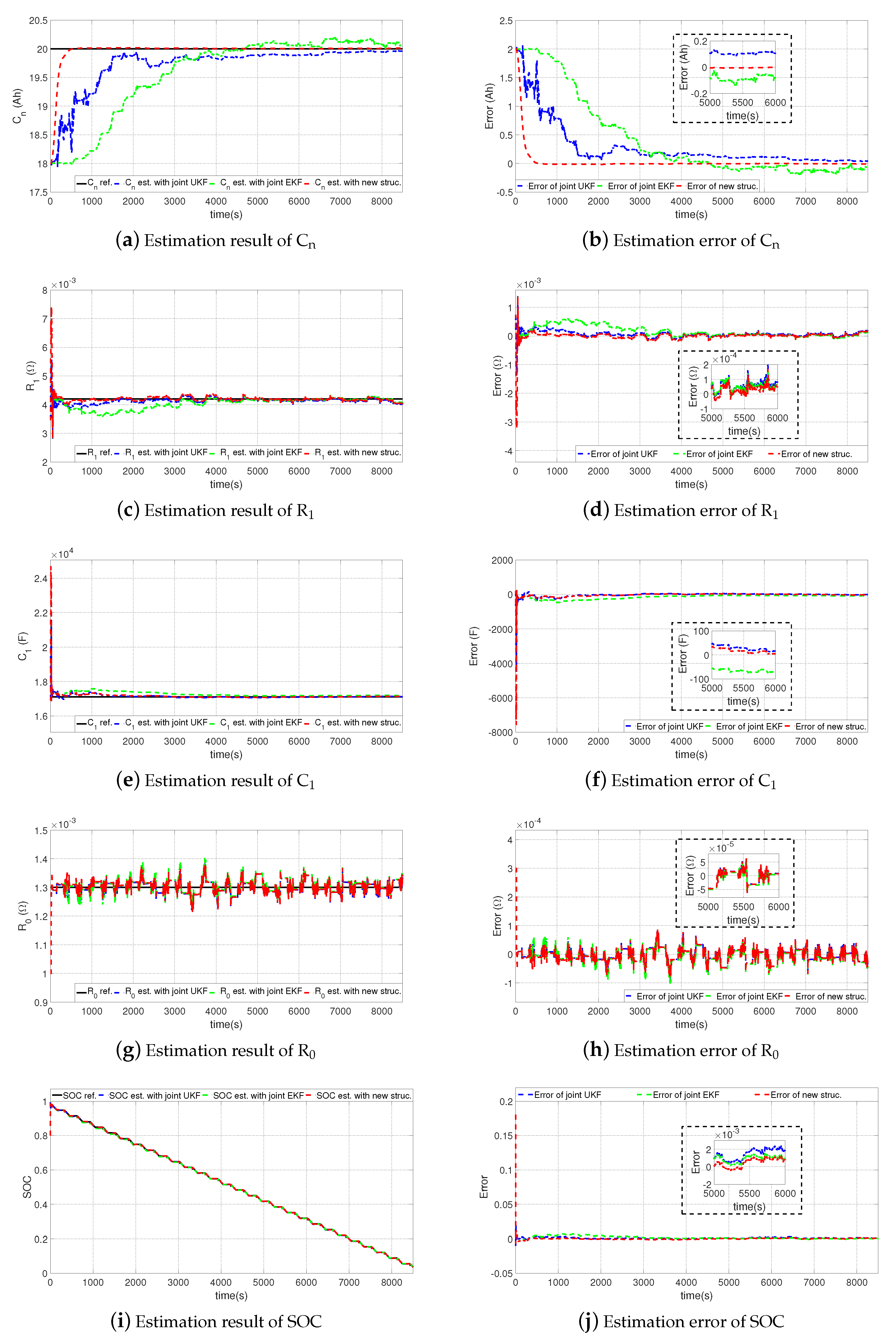
5.2. Evaluation of the New Estimation Structure
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tang, L.; Rizzoni, G.; Onori, S. Energy management strategy for HEVs including battey life optimization. IEEE Trans. Transp. Electrif. 2015, 1, 211–222. [Google Scholar] [CrossRef]
- Zou, Y.; Hu, X.; Ma, H.; Li, S.E. Combined state of charge and state of health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2014, 273, 793–803. [Google Scholar] [CrossRef]
- Ouddah, N.; Boukhnifer, M.; Raisemche, A. Two control energy management schemes for electrical hybrid vehicle. In Proceedings of the 10th International Multi-Conferences on Systems, Signals & Devices 2013 (SSD13), Hammamet, Tunisia, 18–21 March 2013. [Google Scholar]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.J. A multi-timescale estimator for battery state of charge and capacity dual estimation based on an online identified model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Zou, C.; Klintberg, A.; Wei, Z.; Fridholm, B.; Wik, T.; Egardt, B. Power capacity prediction for lithium-ion batteries using economic nonlinear model predictive control. J. Power Sources 2018, 396, 580–589. [Google Scholar] [CrossRef]
- Zhao, S.; Duncan, S.R.; Howey, D.A. Observability analysis ans state estimation of lithium-ion batteries in the presence of sensor biases. IEEE Trans. Control Syst. Technol. 2017, 25, 326–333. [Google Scholar] [CrossRef]
- Duong, V.; Bastawrous, H.A.; Lim, K.; See, K.W.; Zhang, P.; Dou, S.X. Online state of charge and model parameters estimation of the LiFePO4 battery in electric vehicles using multiple adaptive forgetting factors recursive least-squares. J. Power Sources 2015, 296, 215–224. [Google Scholar] [CrossRef]
- Lin, X. Theoretical analysis of battery SOC estimation errors under sensor bias and variance. IEEE Trans. Ind Electron. 2018, 65, 7138–7148. [Google Scholar] [CrossRef]
- Xia, B.; Lao, Z.; Zhang, R.; Tian, Y.; Chen, G.; Sun, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. Online parameter identification and state of charge estimation of lithium-ion batteries based on forgetting factor recursive least squares and nonlinear Kalman filter. Energies 2018, 11, 3. [Google Scholar] [CrossRef]
- Wei, Z.; Meng, S.; Xiong, B.; Ji, D.; Tseng, K.J. Enhanced online model identification and state of charge estimation for lithium-ion battery with a FBCRLS based observer. Appl. Energy 2016, 181, 332–341. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Xiong, R.; Dong, G.; Pou, J.; Tseng, K.J. Online estimation of power capacity with noise effect attenuation for lithium-ion battery. IEEE Trans. Ind. Electron. 2018, 66, 5724–5735. [Google Scholar] [CrossRef]
- Wei, Z.; Dong, G.; Zhang, X.; Pou, J.; Quan, Z.; He, H. Noise-immune model identification and state of charge estimation for lithium-ion battery using bilinear parameterization. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Åström, K.J.; Wittenmark, B. Adaptive Control, 2nd ed.; Dover Publications: New York, NY, USA, 2013. [Google Scholar]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Plett, G.L. Dual and joint EKF for simultaneous SOC and SOH estimation. In Proceedings of the 21st Electric Vehicle Symposium, Berlin, Germany, 2–6 April 2005. [Google Scholar]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs Part 2: Simultaneous state and parameter estimation. J. Power Sources 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H. Online estimation of model parameters and state-of-charge of LiFePO4 batteries in electric vehicles. Appl. Energy 2012, 89, 413–420. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, Z.; Ji, G. Lithium-ion battery state of charge estimation with model parameters adaption using H∞ extended Kalman filter. Control Eng. Pract. 2018, 81, 114–128. [Google Scholar] [CrossRef]
- Kim, I.-S. A technique for estimating the state of health of lithium batteries through a dual-sliding-mode observer. IEEE Trans. Power Electron. 2010, 25, 1013–1022. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Shen, W. A lithium-ion battery-in-the-loop approach to test and validate multiscale dual H infinity filters for state-of-charge and capacity estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M.G. A double-scale, particle-filtering, energy state prediction algorithm for lithium-ion batteries. IEEE Trans. Ind. Electron. 2018, 65, 1526–1538. [Google Scholar] [CrossRef]
- Yu, Q.; Xiong, R.; Lin, C.; Shen, W.; Deng, J. Lithium-ion battery parameters and state-of-charge joint estimation based on H-infinity and unscented Kalman filters. IEEE Trans. Veh. Technol. 2017, 66, 8693–8701. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Lin, X.; Perez, H.E.; Mohan, S.; Siegel, J.B.; Stefanopoulou, A.G.; Ding, Y.; Castanier, M.P. A lumped-parameter electro-thermal model for cylindrical batteries. J. Power Sources 2014, 257, 1–11. [Google Scholar] [CrossRef]
- Einhorn, M.; Conte, F.V.; Kral, C.; Fleig, J. Comparison, selection, and parameterization of electrical battery models for automotive applications. IEEE Trans. Power Electron. 2013, 28, 1429–1437. [Google Scholar] [CrossRef]
- Yu, Q.; Xiong, R.; Wang, L.; Lin, C. A comparative study on open circuit voltage models for lithium-ion batteries. Chin. J. Mech. Eng. 2018, 31, 1–8. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C.C. State of charge estimation of lithium-ion batteries in electric drive vehicles using exended Kalman filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar] [CrossRef]
- Chiang, Y.H.; Sean, W.Y.; Ke, J.C. Online estimation of internal resistance and open-circuit voltage of lithium-ion batteries in electric vehicles. J. Power Sources 2011, 196, 3921–3932. [Google Scholar] [CrossRef]
- Ogata, K. Control System Design in State Space. In Modern Control Engineering, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2009; pp. 751–792. [Google Scholar]
- Shi, Z.; Auger, F.; Schaeffer, E.; Guillemet, P.; Loron, L. Interconnected observers for online supercapacitor ageing monitoring. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Hua, Y.; Cordoba-Arenas, A.; Warner, N.; Rizzoni, G. A multi time-scale state-of-charge and state-of-health estimation framework using nonlinear predictive filter for lithium-ion battery pack with passive balance control. J. Power Sources 2015, 280, 293–312. [Google Scholar] [CrossRef]
- Hauser, A.; Kuhn, R. High-voltage battery management systems (BMS) for electric vehicles. In Advances in Battery Technologies for Electric Vehicles; Woodhead Publishing: Sawston, UK, 2015; pp. 265–282. [Google Scholar]
- Meng, J.; Boukhnifer, M.; Diallo, D. A comparative study of open-circuit-voltage estimation algorithms for lithium-ion batteries in battery management systems. In Proceedings of the 6th IEEE Internal conference on Control, Decision and Information Technologies, Paris, France, 23–26 April 2019. [Google Scholar]
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint EKF | Joint UKF | New Structure | |
|---|---|---|---|
| Average calculation time (s) | 0.264 | 3.813 | 1.986 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, J.; Boukhnifer, M.; Diallo, D.; Wang, T. A New Cascaded Framework for Lithium-Ion Battery State and Parameter Estimation. Appl. Sci. 2020, 10, 1009. https://doi.org/10.3390/app10031009
Meng J, Boukhnifer M, Diallo D, Wang T. A New Cascaded Framework for Lithium-Ion Battery State and Parameter Estimation. Applied Sciences. 2020; 10(3):1009. https://doi.org/10.3390/app10031009
Chicago/Turabian StyleMeng, Jianwen, Moussa Boukhnifer, Demba Diallo, and Tianzhen Wang. 2020. "A New Cascaded Framework for Lithium-Ion Battery State and Parameter Estimation" Applied Sciences 10, no. 3: 1009. https://doi.org/10.3390/app10031009
APA StyleMeng, J., Boukhnifer, M., Diallo, D., & Wang, T. (2020). A New Cascaded Framework for Lithium-Ion Battery State and Parameter Estimation. Applied Sciences, 10(3), 1009. https://doi.org/10.3390/app10031009