1. Introduction
Permanent magnet synchronous motors (PMSM) have been widely used in the fields of electric vehicle drive system, robot, aerospace, intelligent manufacture, and other fields because of the advantages of excellent efficiency, high power density, low inertia, high torque-current ratio, no excitation loss, et al. [
1]. In order to ensure the smooth running of the motor, it is very important to adopt efficient and stable control strategies for each part of the three-phase permanent magnet synchronous motor system, such as speed control [
2], current control [
3], and pulse width modulation [
4]. Besides, sensor-less control also needs observer strategy or other control methods [
5]. Among them, speed control is particularly important.
The control of current loop can be simply divided into current control in static coordinate system and current control in synchronous rotating coordinate system. For the current control in synchronous rotation coordinates, hysteresis current control and PI current control are commonly used at present. Hysteresis current control can meet the requirements of motor operation, but the electromagnetic torque fluctuates greatly during the whole starting process, and PI regulator has good dynamic performance and anti-disturbance ability, which can meet the needs of actual motor control performance [
6]. The pulse width demodulation technology of three-phase voltage source inverter mainly includes two-level space vector pulse width modulation (SVPWM) and sinusoidal pulse width modulation (SPWM). SVPWM has better harmonic elimination effect and torque ripple resistance than SPWM [
7].
In recent years, many control technologies are used in the research of speed control for PMSM, which can be divided into linear control and nonlinear control [
8]. As is known to us all, many linear control methods based on transfer functions (the most popular one is PI control [
9]) are sensitive to the system model accuracy, which is highly susceptible to external disturbances and internal parameter mismatch. Therefore, many scholars draw attention on nonlinear control design for PMSM, such as robust control [
10], adaptive control [
11], and sliding mode control [
12].
Among these speed control strategies for PMSM, sliding mode control with the merits of simple structure and fast response has become one of the most popular methods. In reference [
13], a nonlinear speed-control algorithm for the PMSM control systems using sliding-mode control (SMC) is proposed to optimize the dynamic performance of speed regulation system. In which, the new sliding-mode reaching law (NSMRL) using the system state variable and the power term of sliding surface function can be expressed in two different forms during the reaching. This method can not only effectively suppress the inherent chattering, but also increases the velocity of the system state reaching to the sliding-mode surface. A new adaptive terminal sliding mode reaching law (ATSMRL) is proposed with continuous fast terminal sliding mode control (CFTSMC) in reference [
14]. It aims to enhance the speed control performance of the permanent magnet synchronous motor (PMSM) with internal and external disturbances. In reference [
15], a novel sliding mode control (NSMC) strategy is developed to improve the robustness, disturbance rejection, and dynamic response performance of permanent magnet synchronous motor (PMSM) speed servo system. The integral of speed error is introduced into sliding mode surface to avoid the requirements of acceleration signal and reduce the steady-state error of the system. It can be found in the existing literature that many scholars focus on the design of new sliding mode reaching law and novel sliding mode surface. One cannot deny that these literatures have achieved good control performance. However, sometimes it is hard to know how to get a new reaching law or a new sliding mode surface, that is, it requires more professional and profound knowledge of sliding-mode control theories.
Nowadays, to get better performance, the integration of control categories with other methods have been a hotspot. The authors propose a speed observer based on back-stepping and sliding mode for low-speed operation in [
16]. The reference [
17] develops a low-order adaptive instantaneous speed estimator (AISE) and a self-tuning control strategy to improve the speed control performance in a wide speed range with unknown inertia parameters. In reference [
10], a model predictive direct speed control (MPDSC) method is proposed to get a good anti-disturbance ability for PMSM. It depends both on full parameter disturbances and load torque observer and the precise mathematical model parameters are not needed. Actually, these methods combine the advantages of various algorithms so as to get good performance.
This paper develops a sliding mode control strategy associated with a load disturbance estimator to enhance the dynamic performance of PMSM in full speed range. The proposed estimator can reconstruct the disturbance in load caused by the variation of load environments. Then, PD control is employed to decrease the overshoot. Finally, the speed tracking performance can be improved by designing an equivalent control law. Further, numerical examples are proposed to verify the effectiveness of the presented method under both high speed and low speed.
The rest of this paper is organized as follows.
Section 2 describes the model of PMSM, in which, the disturbance and uncertainties are discussed and modeled. An estimator and control strategies are designed in
Section 3. Then the main theoretical results are shown in
Section 4. Finally,
Section 5 summarizes the innovations of this thesis and makes a prospect of this paper.
2. Materials and Methods
In this section, PMSM mathematical model is constructed to support the design of control strategy. Disturbance and uncertainties are modeled to clarify its impact on the system. Hence, one can understand how disturbance and uncertainties affect the performance of the PMSM system. Then, the estimator and controller are designed to deal with the corresponding problems and achieve speed regulation goals.
2.1. PMSM Mathematical Model
PMSM plays an increasingly important role in the speed regulation system because of its significant advantages in structure, efficiency, and so on compared with other types of motors. In existing literatures, all the PMSM mathematical model are based on the conventional assumption [
15]. In order to improve the effectiveness of the speed controller, this paper considers the mathematical model in the
d-q synchronous rotating reference. The stator’s voltage equation is shown as follows.
in which, subscript
d and
q refer to the
d-component and
q-component.
u,
i, and
represent the stator’s voltage, stator’s current, and stator’s flux, respectively. Then
is the electrical angular velocity and
R is the stator resistor.
For surface-mounted PMSM, it can be obtained that stator inductor
. The following mathematical model with the assumption that
B = 0 is as following:
in which,
is the flux of magnet,
is the pole pairs of PMSM,
is the mechanical angular velocity,
J is the inertia,
B is the friction coefficient, and
is the load torque.
Based on the characters of PMSM, one can get that , , and are variables and bounded. Thus, the nonlinear term in (2) is bounded and the varying range is determined by the value of mentioned parameters above.
As is known to all scholars, the controller can achieve better performance according to using rotor field orientation control (
) strategy. Then, the mathematical model in Equation (2) can be written as follows.
Therefore, the complex nonlinear mathematical model function is simplified and linearized.
2.2. System Model for Disturbance Estimator Design
It can be easily found that equation is obtained by the common assumptions. The rotor’s magnetic field is sinusoidal in the air gap space. The saturation of stator core, core Eddy current, hysteresis loss, and damping of rotor windings are ignored. It is also assumed that the magnetic circuit is linear. However, these factors will affect the performance of PMSM in the actual operating environment. Simultaneously, the nonlinear terms in system (2) also deteriorate the operating effects. Linearizing the nonlinear system with linear equation will make the research relatively simple, but it cannot completely reflect the complicated actual situation, so the accuracy of the calculation result is relatively low [
18].
In this subsection, we will discuss the effects by modeling and quantifying these factors.
Define that
,
,
, then one can get that
in which, the parameters can be obtained by Equation (6) as
,
,
,
,
,
,
.
Then, it can be assumed that the influence of fore-mentioned factors, including saturation of stator core, hysteresis loss, and so on, can be quantified in the system load disturbances. The details of considering the factors are as follows.
where
represents the load disturbances. Define that
. One can get that
Based on the model (6), the observer and estimator can be constructed to get the load, disturbance value, and the estimation of . It will be further discussed in the next section.
In practice, the dynamic change of load will cause load disturbance, and the output speed of motor will also shake, which greatly affects the motion accuracy and working stability of PMSM drive system [
19]. How to suppress this load disturbance caused by load change is what this paper is doing.
2.3. System Model Design for Combined Controller
To get better control performance, we redefined the state variables and constructed another system function in this subsection.
First, the state variable is defined as:
in which,
is the reference speed of PMSM, usually, it is set as a constant value. Hence, one can get that
Then, one can obtain the system as follows.
where
and
.
Conventionally, sliding surface and reaching law are designed to construct the control strategy in order to achieve good performance. But abundant experiences and knowledge are needed to improve them. To solve the mentioned problems above, this paper proposes a novel combined control approach based on the principle of equivalent control.
3. Main Results
This section may be divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation, as well as the experimental conclusions that can be drawn.
3.1. Design of the Combined Estimator
In speed regulation of PMSM, model simplification and operating environments may cause the parameter uncertainties and load disturbances. Hence, the dynamic and steady-state performance of PMSM will be reduced. In this paper, a compensational estimator is presented to reconstruct the modeled disturbance signal, which contains the influence of both parameter uncertainties and load disturbance. They can be used in controller design to improve the capability for anti-jamming.
Based on the system (5), state observer is proposed as follows.
where
and
are the estimation of
and
d.
represents the observer gain matrix.
The compensational estimator is presented as Equation (11) if
is a slow time-varying signal.
in which,
is the estimator gain matrix, and the parameters in
are positive. Then it is followed by the stability analysis of the proposed method.
Lemma 1. Based on system (9) and the estimator (11), one can get that the observer (10) and estimator (11) can achieve good performance if the following inequality holds [20]. Hence, one can get that the proposed method can achieve stable convergence.
Proof 1: The Lyapunov function is defined as
where
,
. The derivative can be written as
Under the assumption that is a slow time-varying signal, it can be obtained that . Hence, holds if and only if inequality (12) holds.
In fact, disturbance signals always show the characteristic of non-stationary in many systems. To enhance the tracking performance, the proposed estimator in Equation (11) can be rewritten as
where
,
, and
are the gain matrices. It can be also obtained that the estimating signal can track actual signal well if Theorem 1 holds. The parameter
is a correction term of estimating results error due to the simplifications and constraint assumptions.
is determined by the experience and the bounds of disturbance signal. □
Theorem 1. Based on system (9) and the estimator (15), set thatand assume that,
,
,
one can get that the observer (10) and estimator (15) can achieve good performance if the following inequality holds. That is, the estimator (15) can be applied in some time-varying disturbance reconstructions if the derivativeof disturbance signal is bounded.
Proof 2: Define that
where
is the Lyapunov function,
,
. Then one can get the derivative as follows.
Thus, the inequality holds if the Theorem 1 holds. The derivative should be bounded to that , . □
3.2. The Combined Controller for Speed Regulation
To obtain better speed regulation performance, a combined controller is designed for PMSM based on the system function (9) in this subsection.
First, the sliding mode surface is introduced as
where
is the sliding parameter. Then, one can get that the derivative of Equation (19) is shown in Equation (20).
The exponential reaching law is employed to ensure the dynamic performance, thus it can be obtained that
in which,
and
are corresponding parameters. Hence, the current at
axis can be rewritten as
Note that, the integral term in Equation (22) is used to reduce the chattering of sliding mode surface and eliminate system steady state error. However, the response ability of the system will be decreased. In this paper, PD control and sliding control are combined to get better dynamic performance. That is, the control law in (22) is presented as
in which,
and
are gain parameters. Specially, one can set that
. It should be pointed out that the control law in Equation (23) is equal to the sliding mode control with general reaching technique.
In other words, , and the value of K can be adjusted to improve the response speed.
Theorem 2. Based on system (9) and reaching technique (24), it can be obtained that the designed control law can get good performance if and only if the following principles holds and the stable state error will be uniform convergent.
Proof 3: The Lyapunov function is defined as
One can get that holds if inequalities (25) holds. □
3.3. The Equivalent Controller Design
To achieve better speed regulation results, the equivalent controller can be presented as
where,
is the common control signal and
is the compensation signal. Then one can get that
Based on the discussion above, one can get better speed regulation performance by using the estimation result in Equation (11).
4. Simulation Results and Discussions
Because of the limited experimental conditions, only simulation verification was carried out rather than actual experiment. Therefore, the simulation results may not be so accurate. After the follow-up funds are sufficient, some practical verification studies will be done. As for the selection methods of these parameters, they are artificially selected according to the conditions calculated in the theoretical part, which is not necessarily the best. In the follow-up, it is considered to use those optimization algorithms such as genetic algorithm and particle swarm optimization algorithm for adaptive selection.
In this section, the surface-mounted three phase PMSM is used as the simulation model. The parameters are shown in
Table 1. The solve method is selected as variable-step ode23tb algorithm, the relative tolerance is set as 0.0001, and the simulation duration is set as 0.4s.
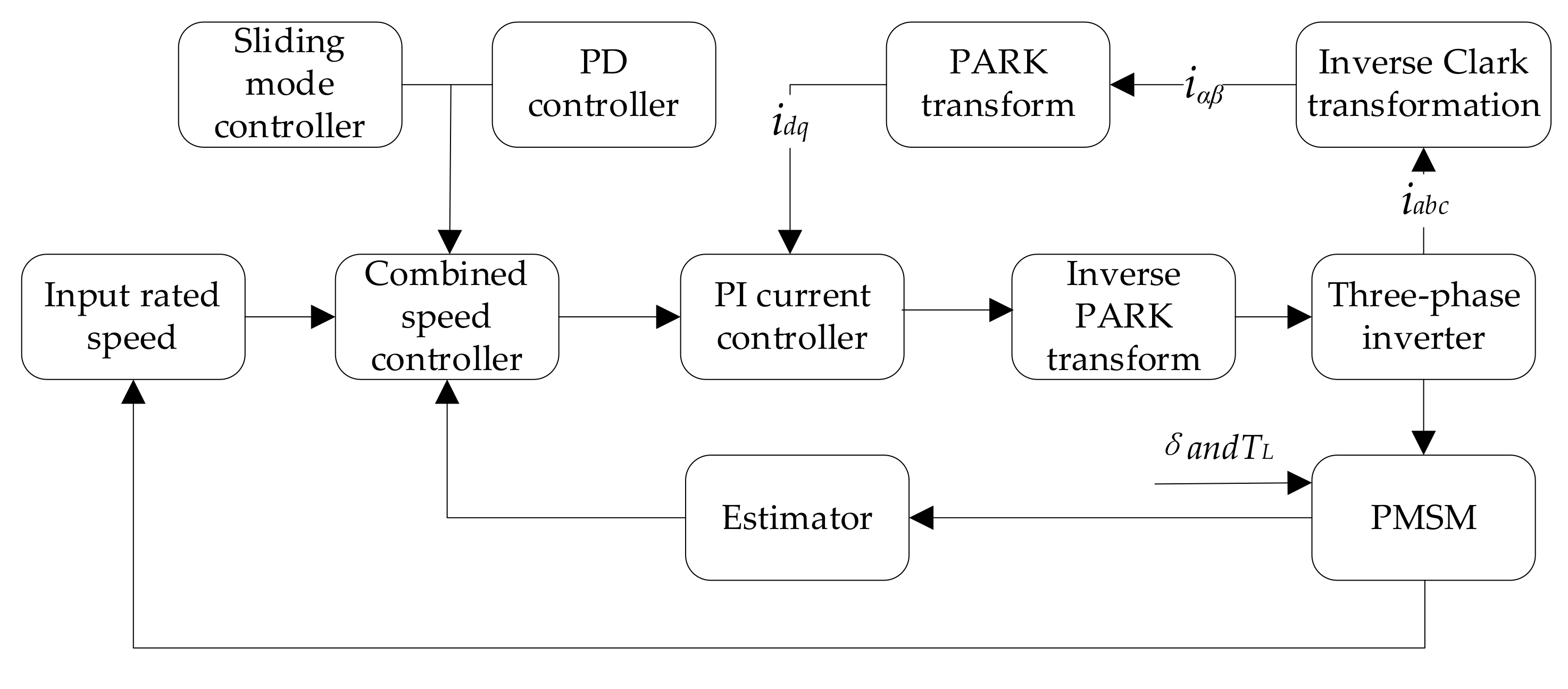
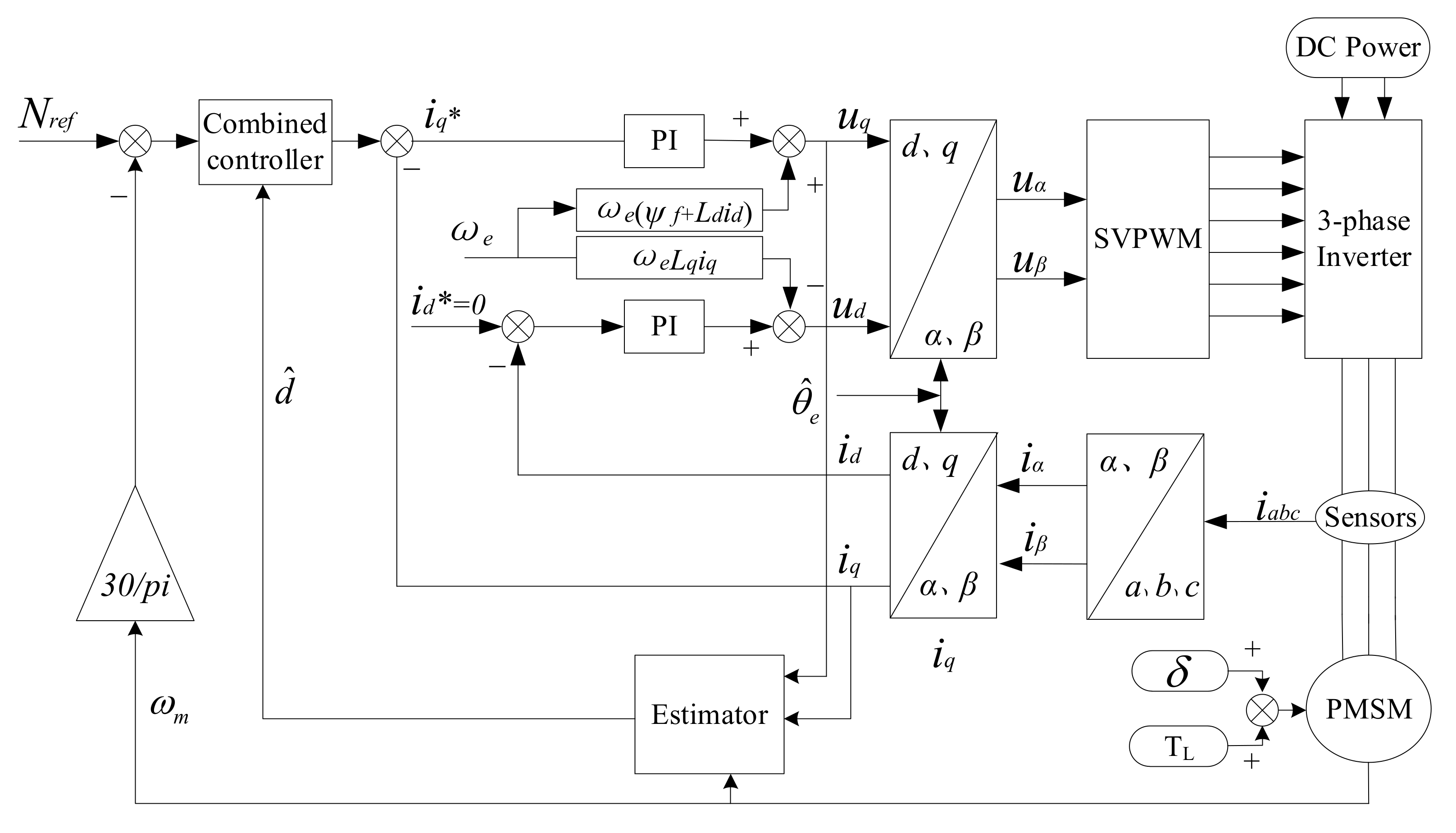
The flowchart and the Simulink block diagram of speed control and estimator are shown in
Figure 1 and
Figure 2. As seen from
Figure 1, estimator is used to reconstruct the disturbance and uncertainties and the combined controller is designed to achieve better dynamic performance and reduce the influence of the disturbances.
It can be seen from
Figure 2 that the control method proposed in this paper is based on
id = 0 strategy. The vector control of three-phase PMSM mainly includes four parts: state observer, speed loop combined controller, current loop PI regulator, and SVPWM algorithm. The design of this paper is mainly embodied in the state observer and speed loop combined controller, and its control effect will be reflected in the following simulation. According to the existing examples [
21] with good control effect, the traditional PI control strategy is adopted for current control, and the SVPWM control strategy is adopted for pulse width demodulation.
4.1. Simulation Results at Low Speed
In this subsection, the reference speed is set as r/s, then it can be obtained that . The load and disturbance are set as N·m and , respectively.
To obtain better speed response, the gain parameters are set as follows. The parameters of sliding mode controller are set as
,
, and
. The PD controller parameters are set as
and
. The observer parameters are set as
and
. The estimator gain is set as
,
. In addition, the correction parameter
. The simulation results are shown in
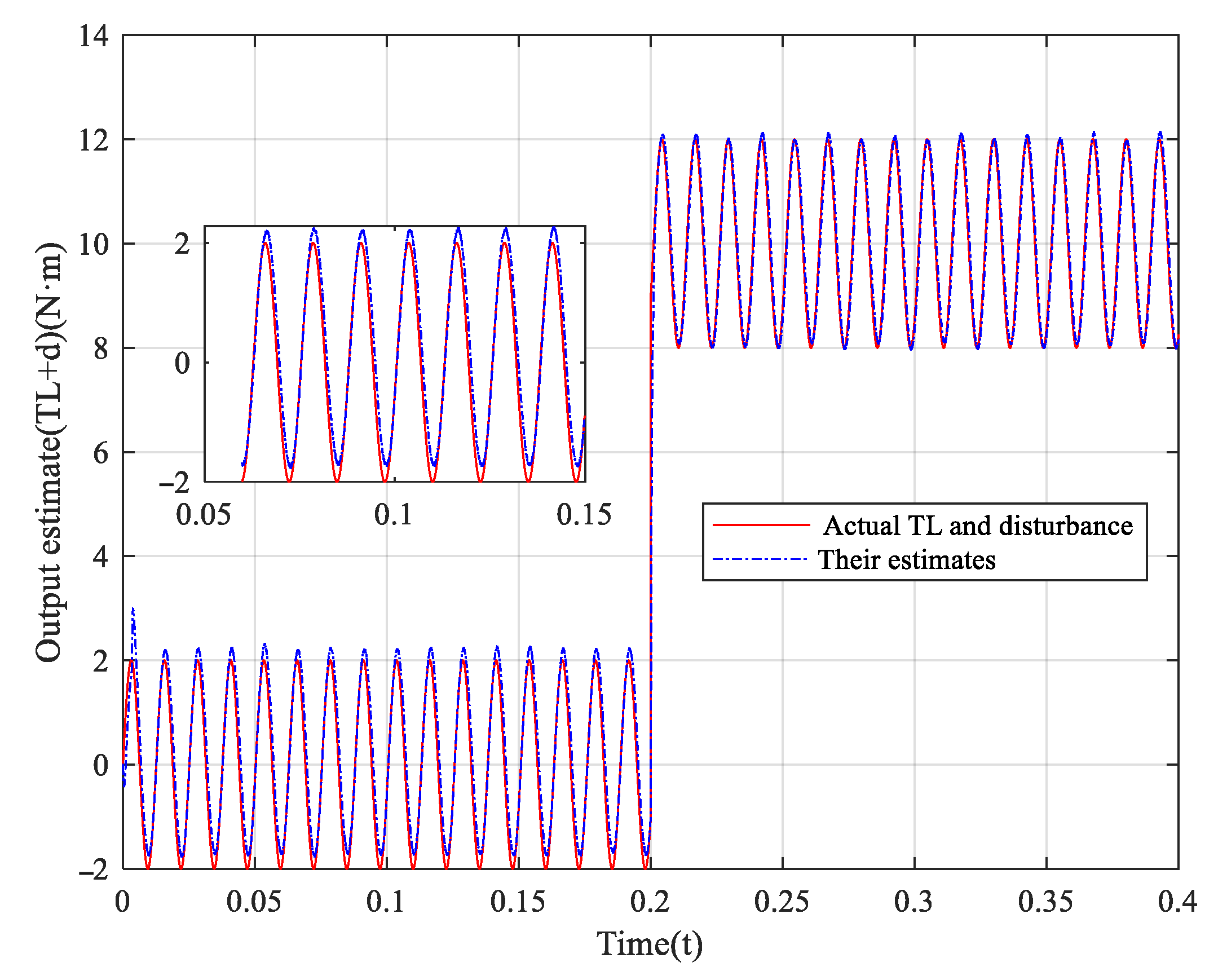
Figure 2,
Figure 3 and
Figure 4.
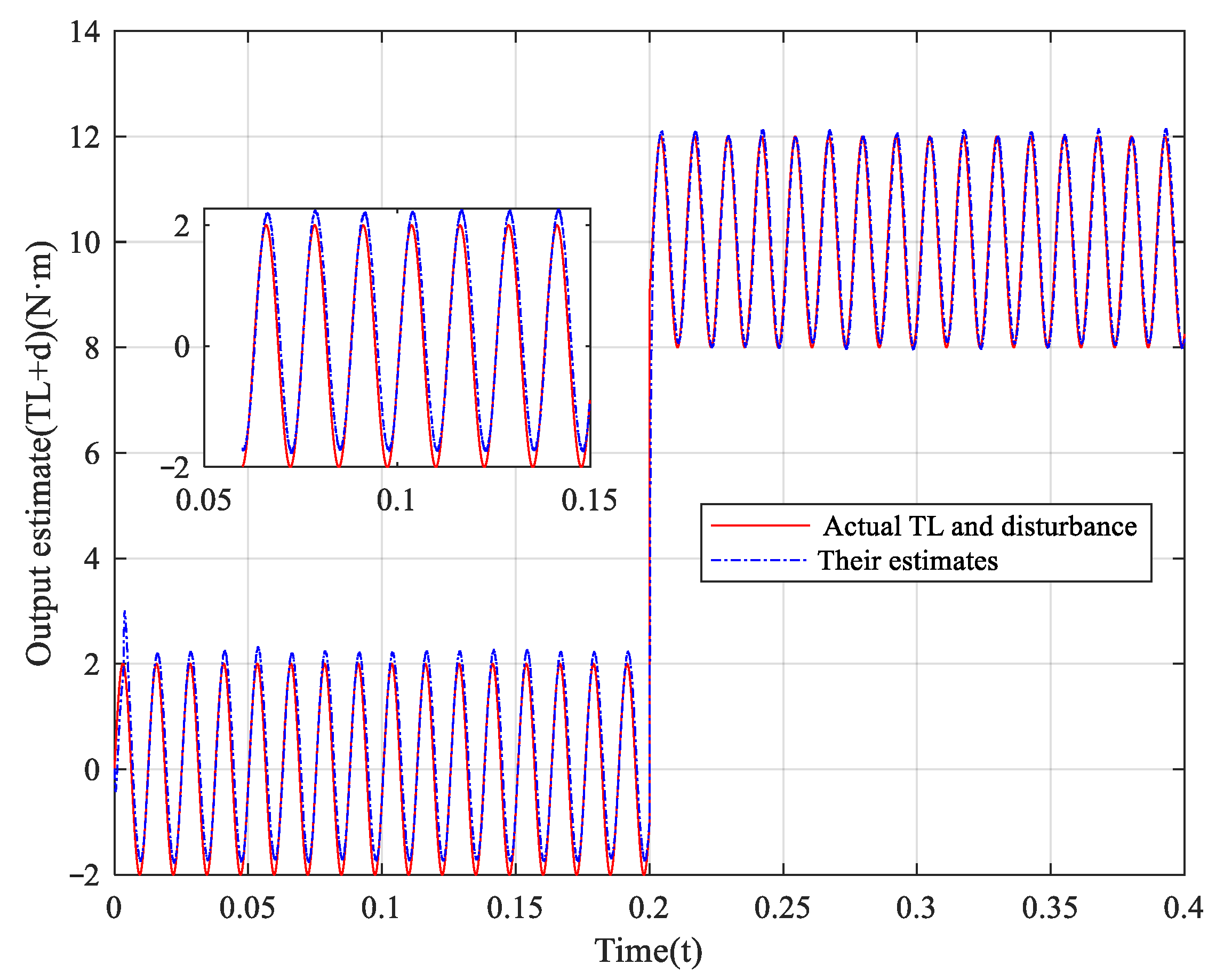
Figure 3 shows the estimation results of load and disturbance. It can be seen that the estimate signal has some slight errors with the actual signal before t = 0.02s and can track the actual signal well after t = 0.02s. This means that the proposed method can well suppress the load disturbance caused by load change. Also, one can find out that the estimate signal has some noise. The reason of the phenomenon is that the numeral model is simplified from Simulink model. Some uncertainties are ignored and operating states are in ideal condition.
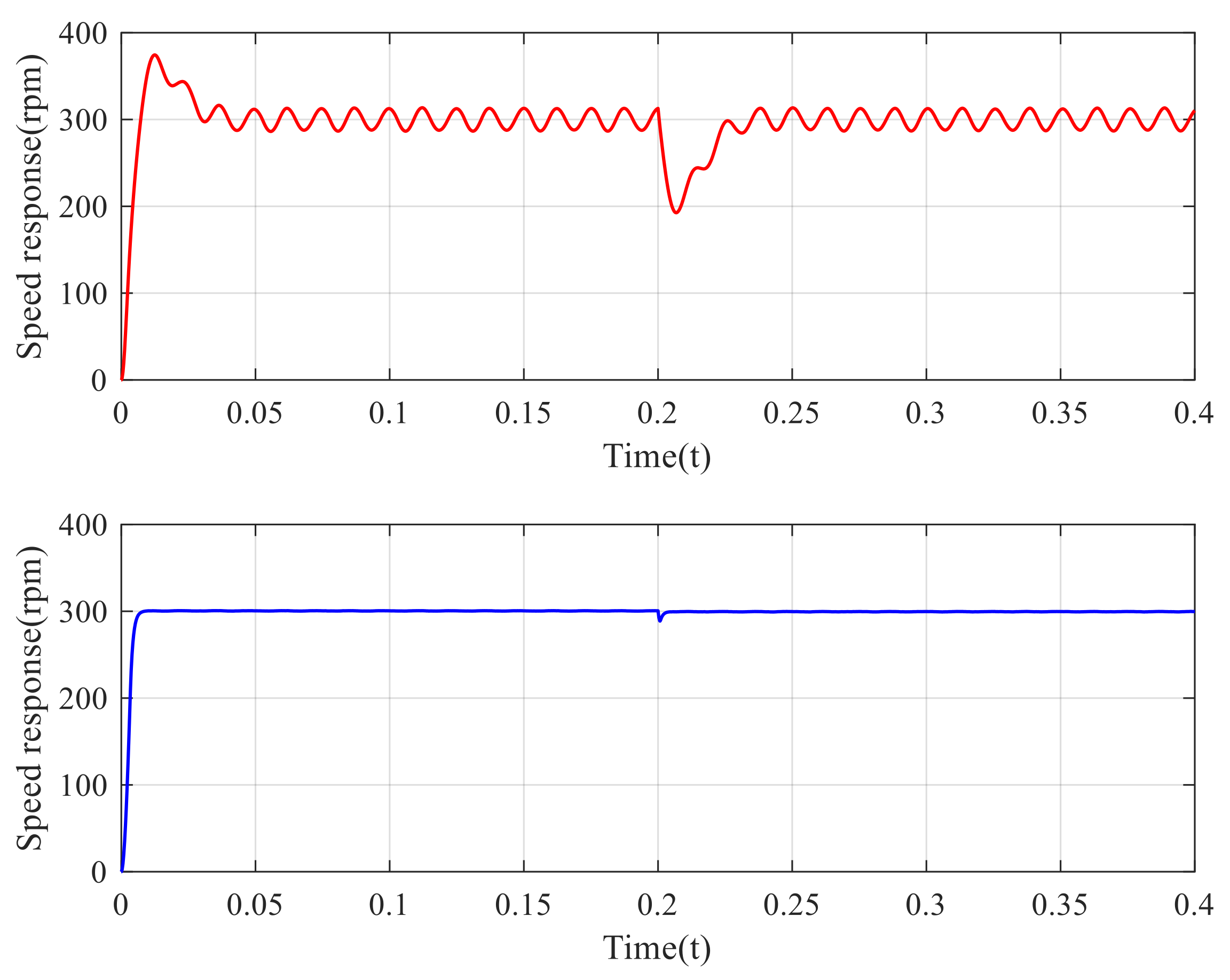
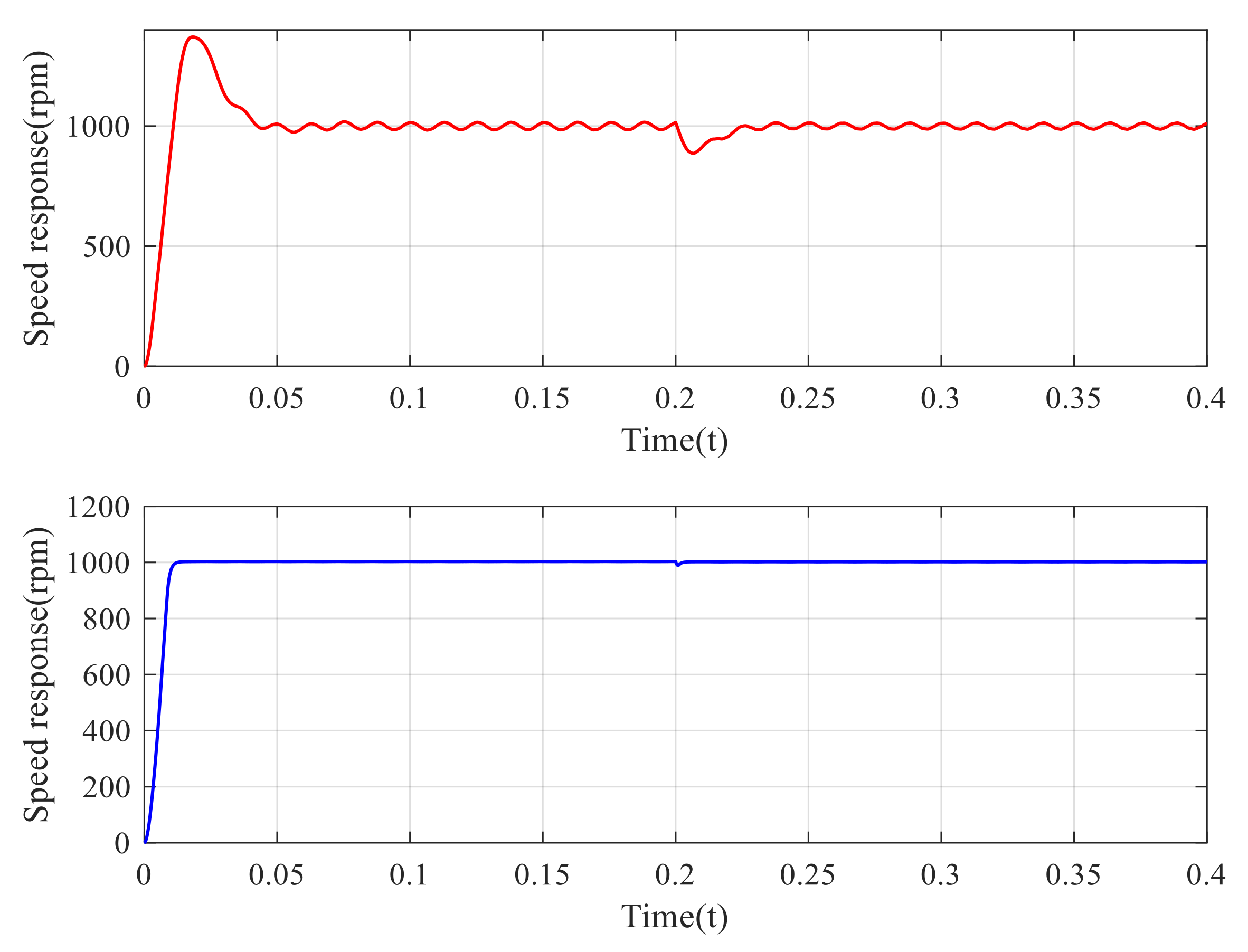
The speed response results with compensation and without compensation are shown in
Figure 4, respectively. One can obtain that the results with compensation are better than that without compensation. The PD control is added to reduce overshoot. In addition, the estimates of load and disturbance are utilized to reduce the impact of noise on the system.
From
Figure 4, the
Table 2 can be obtained. In the first column of the table, are the rising time, setting time, overshoot of the speed curve, the lowest speed dropped when encountering torque interference in 0.02 s, and the time to restore to the rated speed. The second and third columns of the table are the values corresponding to the first column of the combined controller and the traditional sliding mode controller designed in this paper. All the five indexes show that the control effect of the proposed combined controller is very good.
4.2. Simulation Results at High Speed
In this subsection, the parameters are set as same as the low speed condition. The ideal speed is set as
. While, the correction parameter
. Then the simulation results are shown in
Figure 5 and
Figure 6.
One can find out that the estimating result is worse than that under low-speed condition. It can be concluded that the proposed method has better estimating performance under low-speed condition. However, the speed-tracking performances are better than sliding mode control under both high-speed condition and low-speed condition. In practical, the factors of load disturbance and measurement noise can cause the change of system performance, even cause safety accident. Through the proposed method, these problems can be reduced or avoided and maintain normal operation of the system.
The
Table 3 can be obtained from
Figure 6. It also shows that the control effect of the proposed combined controller is very good. The decrease of overshoot is due to the addition of PD controller based on sliding mode controller. The anti-torque capability is enhanced because the state observer is used to estimate the torque disturbance, and then compensate it into the combined controller.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}