Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV


Abstract
Featured Application
Abstract
1. Introduction
2. Design of Structure and Main Parameters
2.1. Agronomic Requirements for Rapeseed Sowing
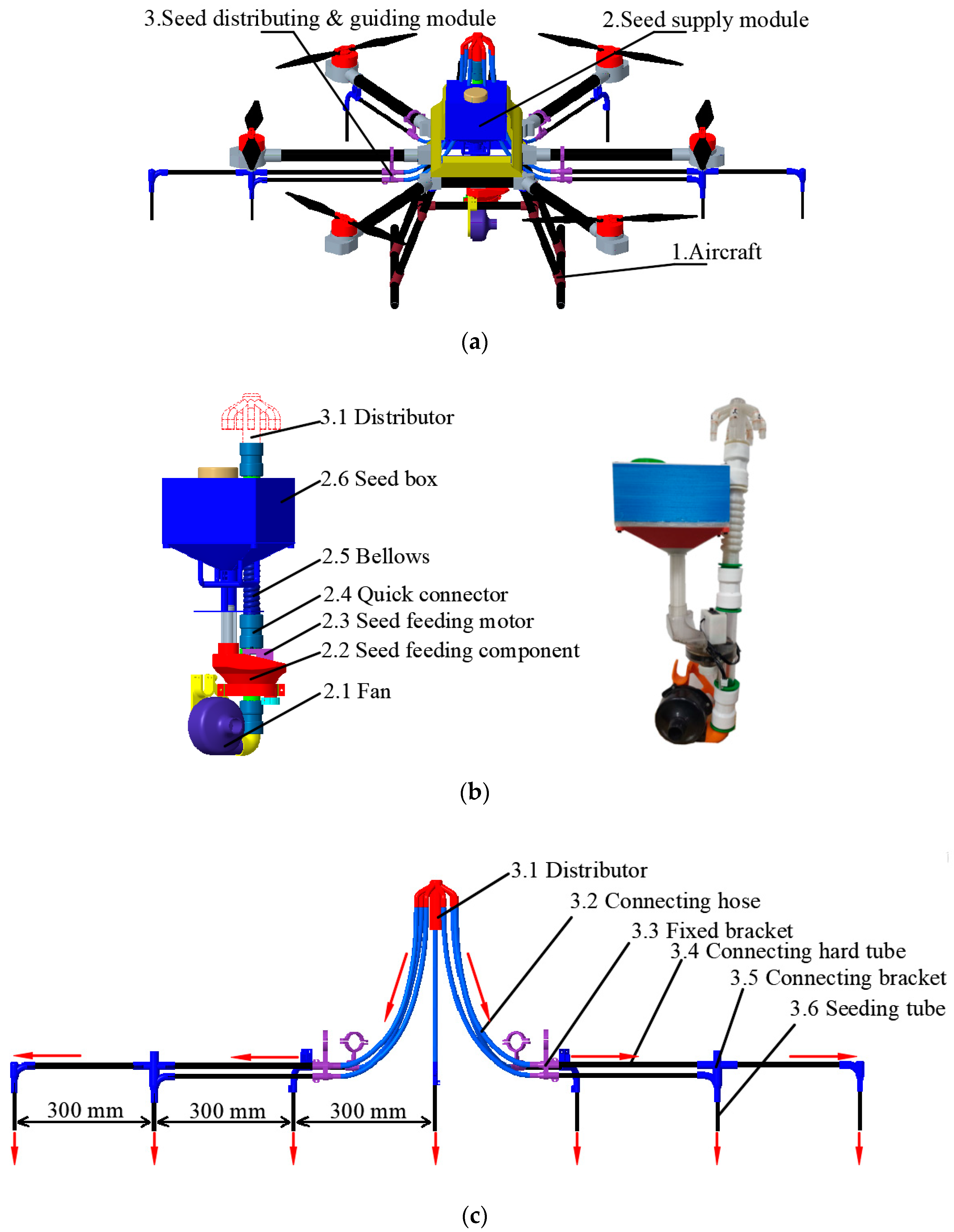
2.2. Overall Structure and Working Principle
2.3. Seed Feeding Component
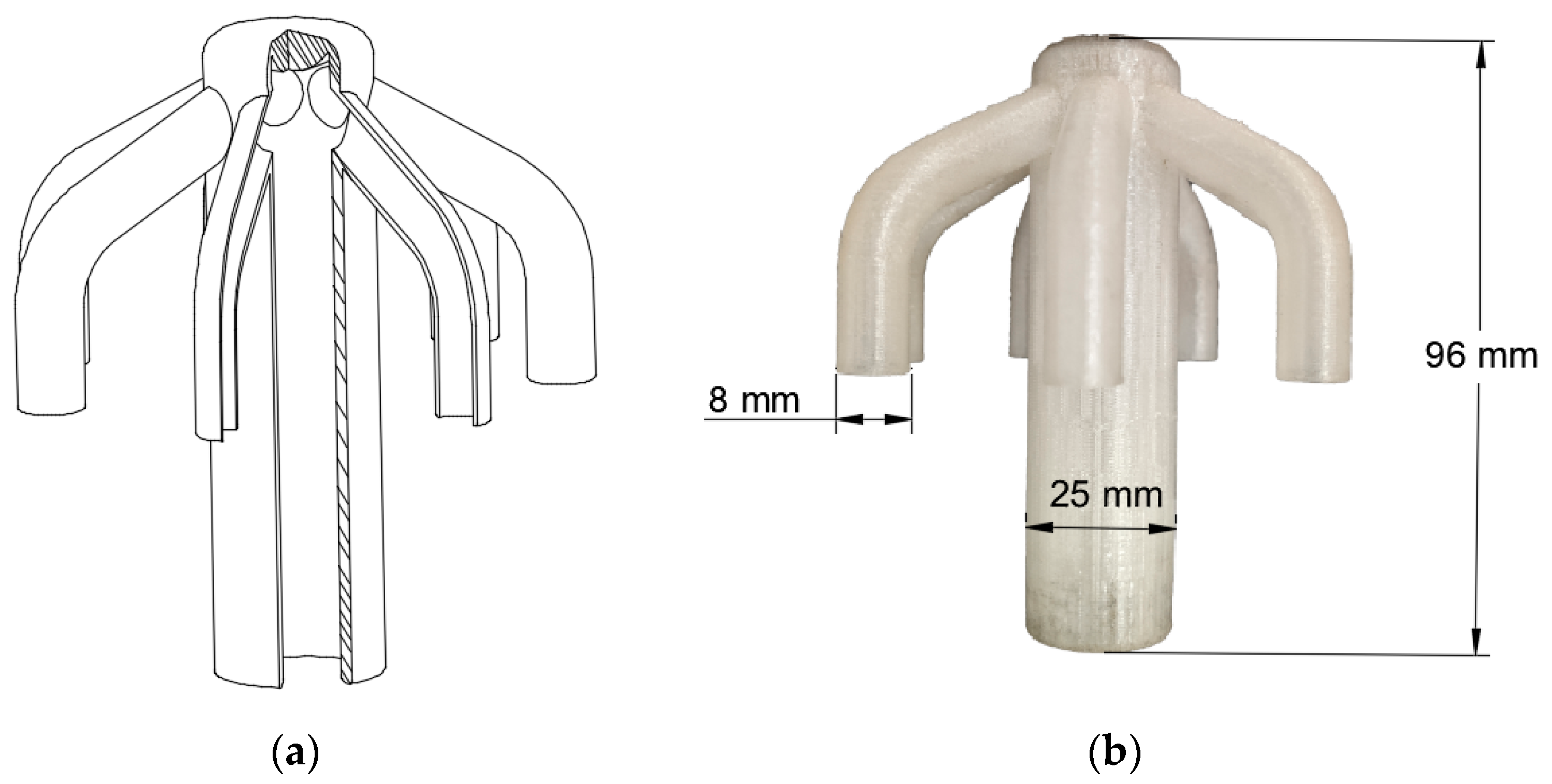
2.4. Distributor and Fan
3. Experiments
4. Results and Discussion
4.1. Standard Orthogonal Experiment
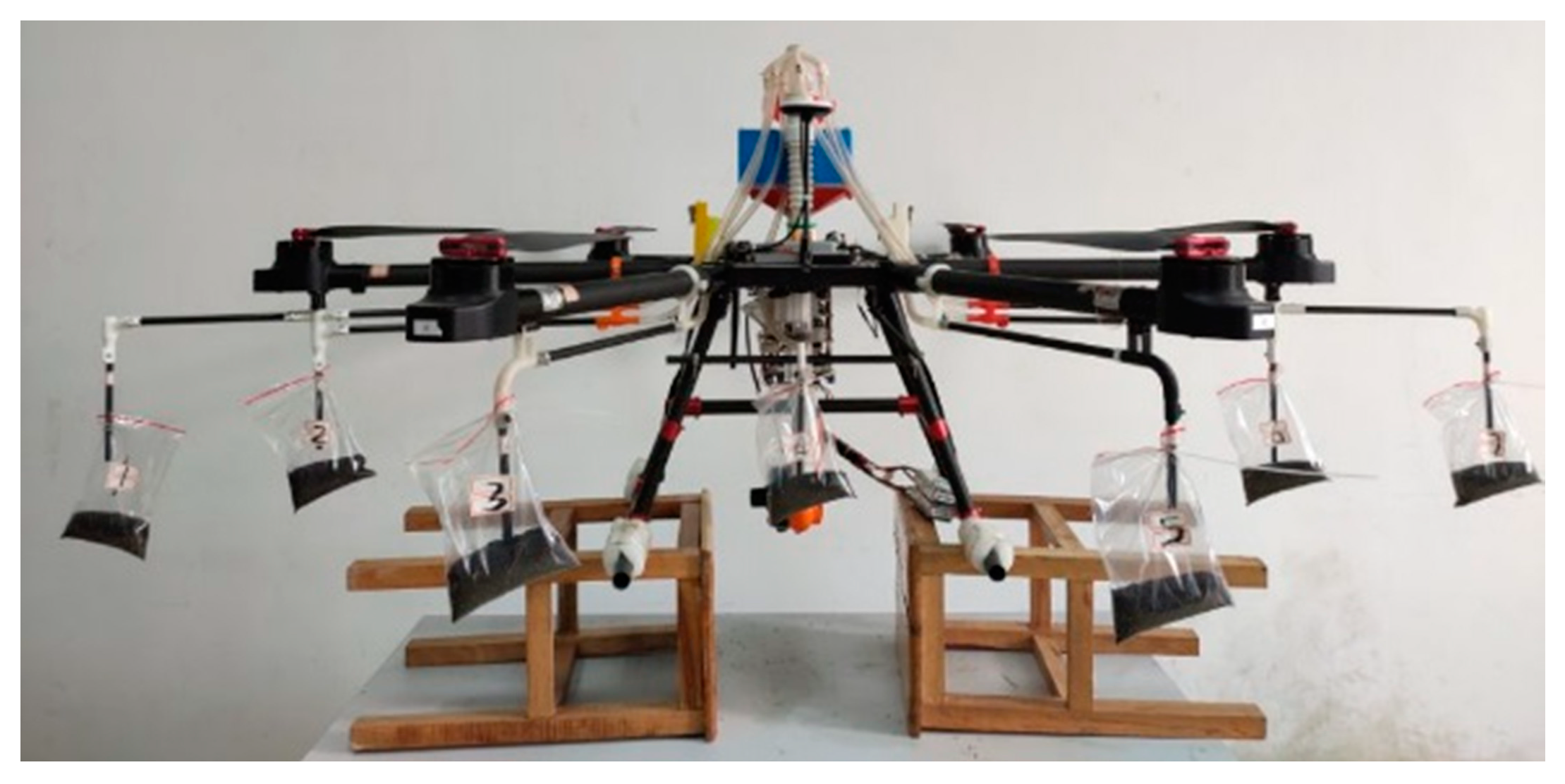
4.2. Static Workbench Experiment
- (i)
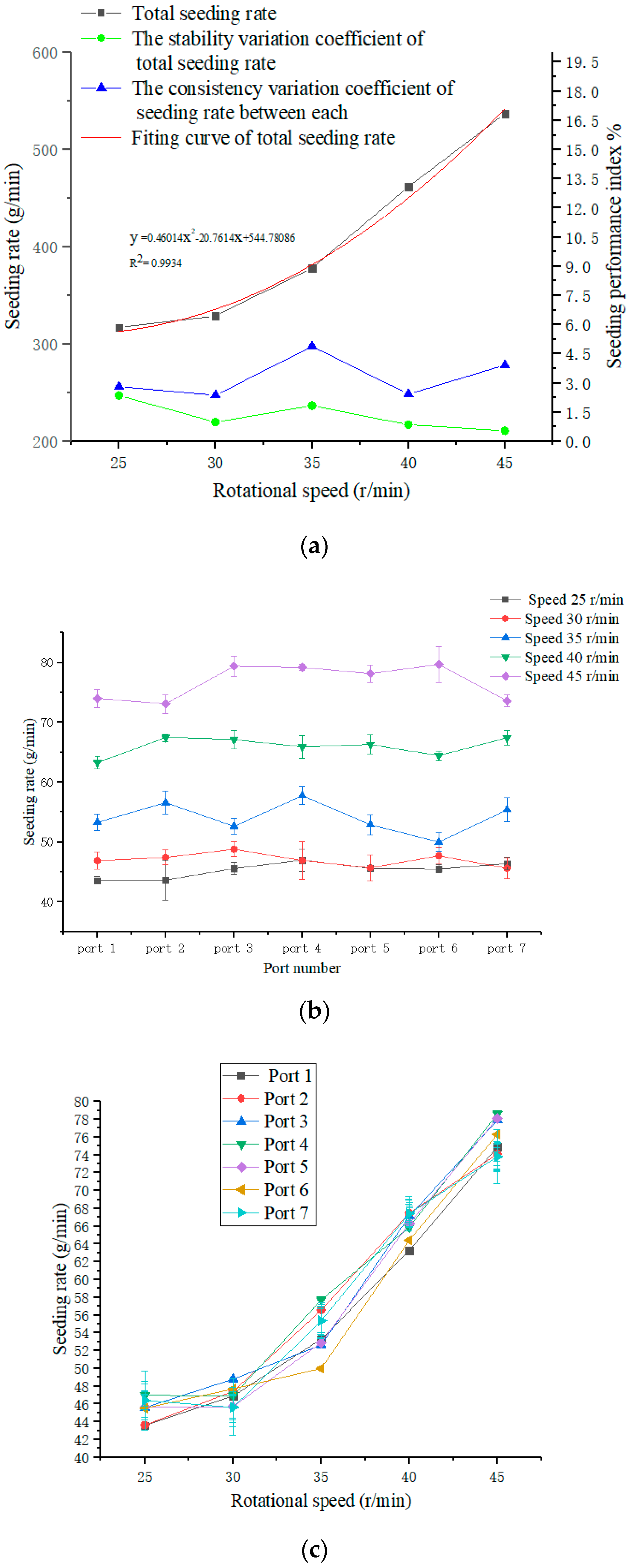
- The maximum average total seeding rate was 537.17 g/min when the rotational speed of the gear disc was 45 r/min, equivalent to 8.95 g/s, which indicated that the agronomic requirement of quantity of seeds per unit area could be met when the flying speed of the aircraft is 7.11 m/s theoretically.
- (ii)
- Both the stability variation coefficient of the total seeding rate and the consistency variation coefficient of the seeding rate between each port were very low, with the maximum values being 2.37% and 4.89%, respectively. This means that the system can ensure stability and uniformity in both the total seeding rate and the seeding rate of individual ports.
- (iii)
- The total seeding rate Y (g/min) increased with the rotational speed of the gear disc X (r/min) according to a polynomial fitting Y = 0.46014X2 − 20.7614X + 544.78086 with R2 = 0.9934.
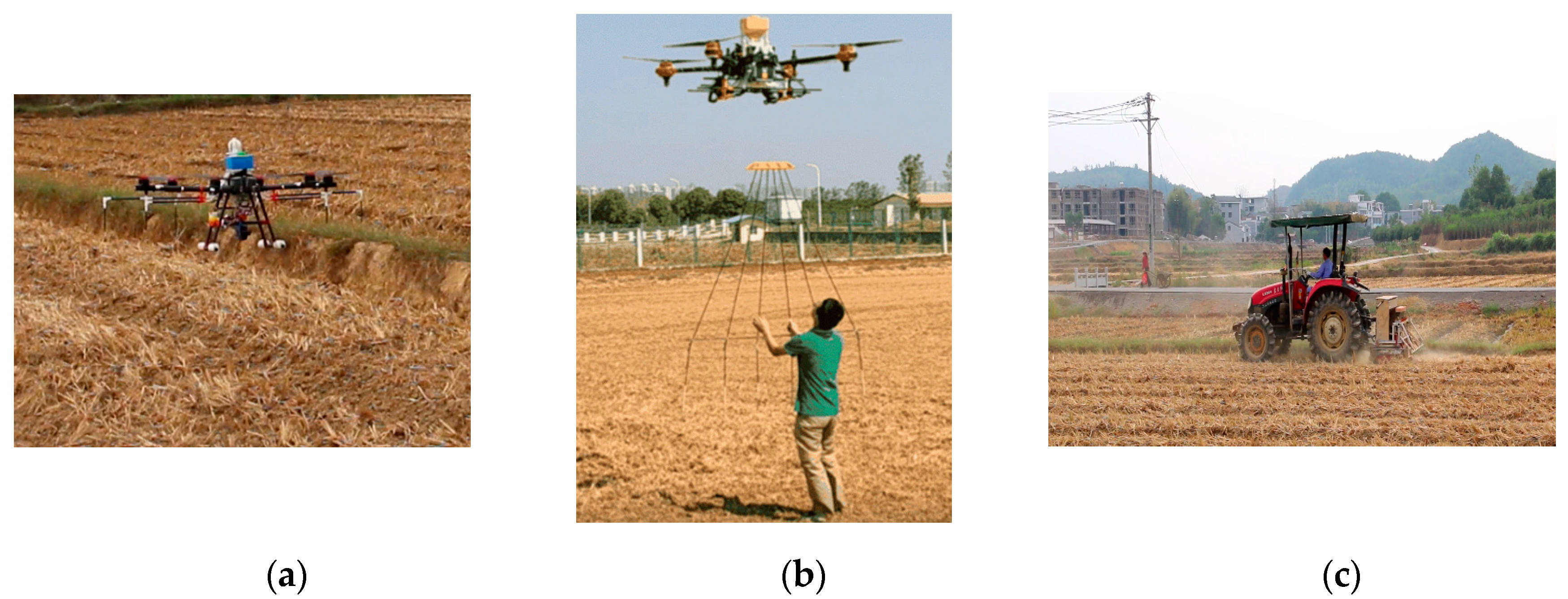
4.3. Field Experiment
- (i)
- The area of fields tested for three different systems were similar from 928.0 m2 to 997.4 m2 with corresponding yields of 135.15 kg to 168.3 kg.
- (ii)
- Further calculations resulted in estimated average yields from 1192.13 to 1409.56 kg/hm2, in which the first mode had a slightly superior performance (5.30% and 18.24% greater) to the other two modes. The yields of all three modes were lower than the normal value in general for this rape variety of Huayouza-62. This might be due to some uncertain common problems in the field management and the relatively low soil fertility of the original fields.
- (iii)
- Average crop numbers per hectare, which was estimated by converting the stubble number while removing the area of the drainage ditch, were equal within error and met the agronomic technical requirements of seedling number per hectare. The first mode had the highest value of crop number and the best average yield. The second mode had the smallest value but the second average yield. The third mode had the second value of crop number, but the worst average yield. Two factors might be the cause of the above results. One would be the counting errors and sampling spot differences. The other might be the differences in soil fertility between fields.
5. Conclusions
- (i)
- The designed aerial seeding system could work stably, uniformly, and efficiently, well meeting the agronomic requirements of rapeseed planting. It resulted in an equivalent average yield and crop numbers per hectare compared with the other two seeding modes.
- (ii)
- Results from the standard orthogonal experiment showed that the rotational speed of the gear disc was the main influencing factor, followed by the fan air pressure, and the seed layer thickness. The best combination of parameter levels for the seed filling effect was B3A3C2 (i.e., the seed layer thickness was 45 mm, the rotation speed was 45 r/min, and the fan air pressure was 2450 Pa).
- (iii)
- Both the stability variation coefficients of the total seeding rate and the consistency variation coefficient of the seeding rate between each port were very low, with the maximum value being 2.37% and 4.89%, respectively. The total seeding rate Y (g/min) increased with the rotational speed of the gear disc X (r/min) according to a polynomial fitting relationship Y = 0.46014X2 − 20.7614X + 544.78086 with R2 = 0.9934.
6. Patent
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liao, Y.; Wang, L.; Liao, Q. Design and test of an inside-filling pneumatic precision centralized seed-metering device for rapeseed. Int. J. Agric. Biol. Eng. 2017, 10, 56–62. [Google Scholar]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Cai, G.; Dias, J.; Seneviratne, L. A Survey of small-scale unmanned aerial vehicles: Recent advances and future development trends. Unmanned Syst. 2014, 2, 175–199. [Google Scholar] [CrossRef]
- Novikov, A.I.; Ersson, B.T. Aerial seeding of forests in Russia: A selected literature analysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 226, 012051. [Google Scholar] [CrossRef]
- Anderson, G.W.; Batini, F.E. Pasture, sheep and timber production from agro-forestry systems with subterranean clover sown under 15-year-old Pinusradiata by a method simulating aerial seeding. Aust. J. Exp. Agric. 1983, 23, 123–130. [Google Scholar] [CrossRef]
- Zhang, R.; Wen, Y.; Li, L.; Chen, L.; Xu, G.; Huang, Y.; Tang, Q.; Yi, T. Method for UAV spraying pattern measurement with PLS model based spectrum analysis. Int. J. Agric. Biol. Eng. 2020, 13, 22–28. [Google Scholar] [CrossRef]
- Wang, C.; Zeng, A.; He, X.; Song, J.; Herbst, A.; Gao, W. Spray drift characteristics test of unmanned aerial vehicle spray unit under wind tunnel conditions. Int. J. Agric. Biol. Eng. 2020, 13, 13–21. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 278–292. [Google Scholar] [CrossRef]
- DJ Innovation Co. Ltd. Available online: https://ag.dji.com/zh-tw?site=brandsite&from=nav (accessed on 20 May 2020).
- Guangzhou XAG Co. Ltd. Available online: https://www.xa.com/en/jetseed (accessed on 20 May 2020).
- Li, J.; Lan, Y.; Zhou, Z.; Zeng, S.; Huang, C.; Yao, W.; Zhang, Y.; Zhu, Q. Design and test of operation parameters for rice air broadcasting by unmanned aerial vehicle. Int. J. Agric. Biol. Eng. 2016, 9, 24–32. [Google Scholar]
- Song, C.; Zhou, Z.; Luo, W.; Jiang, R.; Lan, Y.; Zhang, H. Thoughts on application of agricultural material spreading technology in unmanned helicopter. J. Agric. Mech. Res. 2018, 40, 1–9. (In Chinese) [Google Scholar]
- Huang, X.; Xu, H.; Zhang, S.; Li, W.; Luo, C.; Deng, Y. Design and experiment of a rape aerial seeding in lines device. Trans. CSAE 2020, 36, 78–87. (In Chinese) [Google Scholar]
- Lei, X.; Liao, Y.; Liao, Q. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Ma, N.; Yuan, J.; Li, M.; Li, J.; Zhang, L.; Liu, L.; Naeem, M.; Zhang, C. Ideotype population exploration: Growth, photosynthesis, and yield components at different planting densities in winter oilseed rape (Brassica napus L.). PLoS ONE 2014, 9, e114232. [Google Scholar] [CrossRef] [PubMed]
- Lei, X.; Yang, W.; Liu, L.; Liu, H.; Ren, W.; Chen, Y. Design and experiment of seed hill feeding device in pneumatic centralized metering device for hybrid rice. Trans. CSAM 2018, 49, 58–67. (In Chinese) [Google Scholar]
- Chen, J.; Ding, S.; Gong, Z.; Lian, Y. Simulation and experimental research on automatic supplying-seeds device of pneumatic and vibratory precision seeder. J. CSAM 2019, 41, 114–118. (In Chinese) [Google Scholar]
- Han, B.; Meng, F.; Liang, L.; Yang, Y.; Wang, B. Numerical simulation and experiment on performance of supplying seeds mechanism of directional precision seeding device for japonica rice. Trans. CSAE 2016, 32, 22–29. (In Chinese) [Google Scholar]
- Chen, L. Design and Experimental Research on Cleaning Device of Rape Combine Harvester. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2013. (In Chinese). [Google Scholar]
- Lei, X. Design and Working Mechanism of Air-Assisted Centralized Metering Device for Rapeseed and Wheat. Ph. D. Thesis, Huazhong Agricultural University, Wuhan, China, 2017. (In Chinese). [Google Scholar]
- Lü, J.; Yang, Y.; Li, Z.; Qin, S.; Li, J.; Liu, Z. Design and experiment of an air-suction potato seed metering device. Int. Agric. Biol. Eng. 2016, 9, 33–42. [Google Scholar]
- Roy, R.K. Design of Experiments Using the Taguchi Approach: 16 Steps to Product and Process Improvement; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor Level | Seed Layer Thickness (mm) | Rotational Speed (r/min) | Air Pressure (Pa) |
|---|---|---|---|
| 1 | 15 | 25 | 1960 |
| 2 | 30 | 35 | 2450 |
| 3 | 45 | 45 | 2940 |
| Test Number | A/Seed Layer Thickness | B/Rotational Speed | C/Fan Air Pressure | D/Blank Column | Seed Feeding Rate (g/min) |
|---|---|---|---|---|---|
| 1 | 1(15) | 1(25) | 1(1960) | 1 | 355.90 |
| 2 | 1 | 2(35) | 2(2450) | 2 | 352.00 |
| 3 | 1 | 3(45) | 3(2940) | 3 | 501.30 |
| 4 | 2(30) | 1 | 2 | 3 | 359.70 |
| 5 | 2 | 2 | 3 | 1 | 345.30 |
| 6 | 2 | 3 | 1 | 2 | 478.30 |
| 7 | 3(45) | 1 | 3 | 2 | 326.50 |
| 8 | 3 | 2 | 1 | 3 | 354.70 |
| 9 | 3 | 3 | 2 | 1 | 547.80 |
| k1 | 403.07 | 347.37 | 396.30 | 416.33 | |
| k2 | 394.43 | 350.67 | 419.83 | 385.60 | |
| k3 | 409.67 | 509.13 | 391.03 | 405.23 | |
| Range | 15.23 | 161.77 | 28.80 | 30.73 | |
| Ranking | B D C A | ||||
| Optimal parameters | B3 C2A3 | ||||
| Seeding Rotational Speed (r/min) | Seeding Rate of Each Port (g/min) | Total Seeding Rate (the Sum of Seven Ports) (g/min) | Stability Variation Coefficient of Total Seeding Rate CVT (%) | Consistency Variation Coefficient of Seeding Rate between each Port CVE (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Test No. | Port 1 | Port 2 | Port 3 | Port 4 | Port 5 | Port 6 | Port 7 | ||||
| 25 | 1 | 44.10 | 45.70 | 46.70 | 49.10 | 46.30 | 45.50 | 47.20 | 324.60 | 2.37 | 2.83 |
| 2 | 43.80 | 39.80 | 45.30 | 46.10 | 43.20 | 46.20 | 45.20 | 309.60 | |||
| 3 | 42.90 | 45.40 | 44.80 | 45.70 | 47.40 | 44.90 | 46.80 | 317.90 | |||
| Average | 43.60 | 43.63 | 45.60 | 46.97 | 45.63 | 45.53 | 46.40 | 317.37 | |||
| 30 | 1 | 48.50 | 46.70 | 49.30 | 47.60 | 43.30 | 48.30 | 47.20 | 330.90 | 1.00 | 2.38 |
| 2 | 45.70 | 48.90 | 49.70 | 43.50 | 47.60 | 46.10 | 43.80 | 325.30 | |||
| 3 | 46.50 | 46.70 | 47.40 | 49.70 | 46.20 | 48.70 | 45.90 | 331.10 | |||
| Average | 46.90 | 47.43 | 48.80 | 46.93 | 45.70 | 47.70 | 45.63 | 329.10 | |||
| 35 | 1 | 54.80 | 58.60 | 52.90 | 59.40 | 54.70 | 51.60 | 53.80 | 385.80 | 1.85 | 4.89 |
| 2 | 52.10 | 56.20 | 51.20 | 56.40 | 51.40 | 49.80 | 54.70 | 371.80 | |||
| 3 | 53.00 | 54.90 | 53.80 | 57.40 | 52.60 | 48.60 | 57.60 | 377.90 | |||
| Average | 53.30 | 56.57 | 52.63 | 57.73 | 52.90 | 50.00 | 55.37 | 378.50 | |||
| 40 | 1 | 63.80 | 67.40 | 68.20 | 66.30 | 67.90 | 64.50 | 66.10 | 464.20 | 0.87 | 2.44 |
| 2 | 62.10 | 66.90 | 67.80 | 63.80 | 64.70 | 63.60 | 68.40 | 457.30 | |||
| 3 | 63.90 | 68.10 | 65.40 | 67.60 | 66.30 | 65.20 | 67.80 | 464.30 | |||
| Average | 63.27 | 67.47 | 67.13 | 65.90 | 66.30 | 64.43 | 67.43 | 461.93 | |||
| 45 | 1 | 72.30 | 71.30 | 81.20 | 79.60 | 79.60 | 82.10 | 72.50 | 538.60 | 0.56 | 3.93 |
| 2 | 74.80 | 73.90 | 79.10 | 79.40 | 76.80 | 80.70 | 74.50 | 539.20 | |||
| 3 | 74.90 | 74.10 | 77.90 | 78.60 | 78.10 | 76.30 | 73.80 | 533.70 | |||
| Average | 74.00 | 73.10 | 79.40 | 79.20 | 78.17 | 79.70 | 73.60 | 537.17 | |||
| Seeding Mode No. | Seeding System | Area (m2) | Yield (kg) | Estimated Average Yield (kg/hm2) | Crop Stubble Number per Square Meter N1 | Estimated Average Crop Number per Hectare N2 |
|---|---|---|---|---|---|---|
| 1 | Aerial seeding system in this study | 997.4 | 168.3 | 1409.56 | 46.0 ± 7.2 | 4.19 × 105 × (1 ± 14.1%) |
| 2 | Aerial seeding system in study [13] | 986.0 | 165.9 | 1338.54 | 42.7 ± 6.8 | 3.84 × 105 × (1 ± 14.4%) |
| 3 | Ground planter (Weiye 2BFG-4) | 928.0 | 135.15 | 1192.13 | 45.5 ± 7.8 | 4.10 × 105 × (1 ± 15.4%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Zhang, S.; Luo, C.; Li, W.; Liao, Y. Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV. Appl. Sci. 2020, 10, 8854. https://doi.org/10.3390/app10248854
Huang X, Zhang S, Luo C, Li W, Liao Y. Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV. Applied Sciences. 2020; 10(24):8854. https://doi.org/10.3390/app10248854
Chicago/Turabian StyleHuang, Xiaomao, Shun Zhang, Chengming Luo, Wencheng Li, and Yitao Liao. 2020. "Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV" Applied Sciences 10, no. 24: 8854. https://doi.org/10.3390/app10248854
APA StyleHuang, X., Zhang, S., Luo, C., Li, W., & Liao, Y. (2020). Design and Experimentation of an Aerial Seeding System for Rapeseed Based on an Air-Assisted Centralized Metering Device and a Multi-Rotor Crop Protection UAV. Applied Sciences, 10(24), 8854. https://doi.org/10.3390/app10248854