Analysis of Influencing Mechanism of Subgrade Frost Heave on Vehicle-Track Dynamic System


Abstract
1. Introduction
2. Materials and Methods
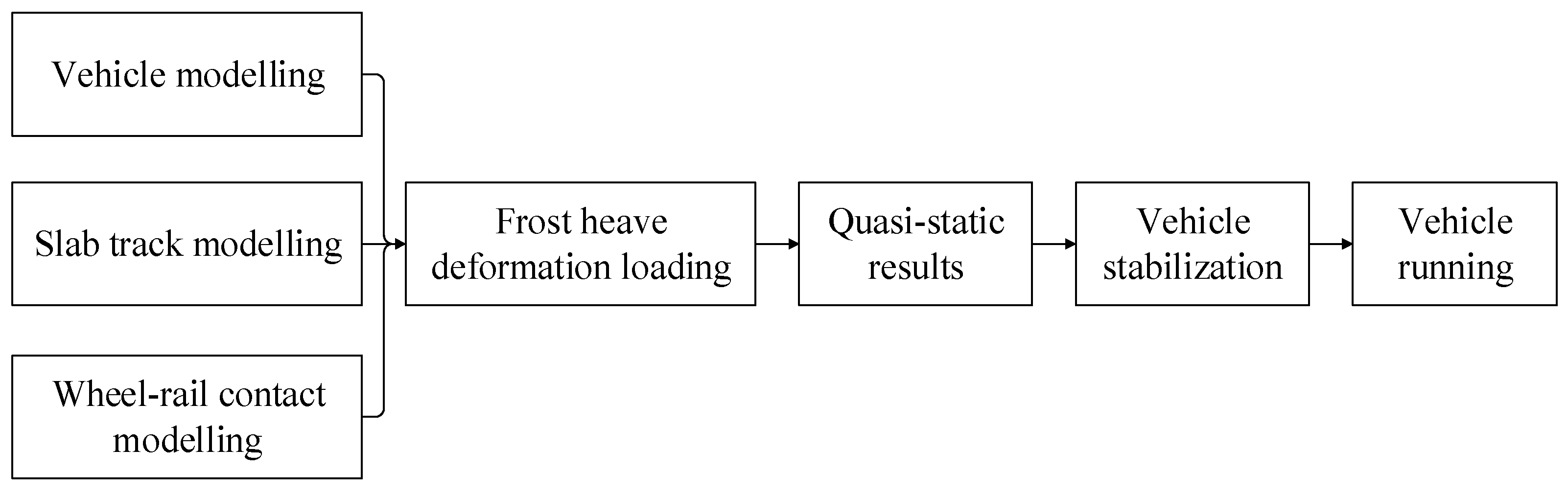
2.1. Modelling Method of a Vehicle-Slab Track Dynamic System
2.1.1. Vehicle Model
- (1)
- There was no eccentricity effect considered during the modelling of the multi-rigid-body system.
- (2)
- The bogie was assumed to be connected by rigid beams.
- (3)
- The primary and secondary suspension systems were simulated by non-linear connector elements which consider both the stiffness and damping in the longitudinal, lateral and vertical directions.
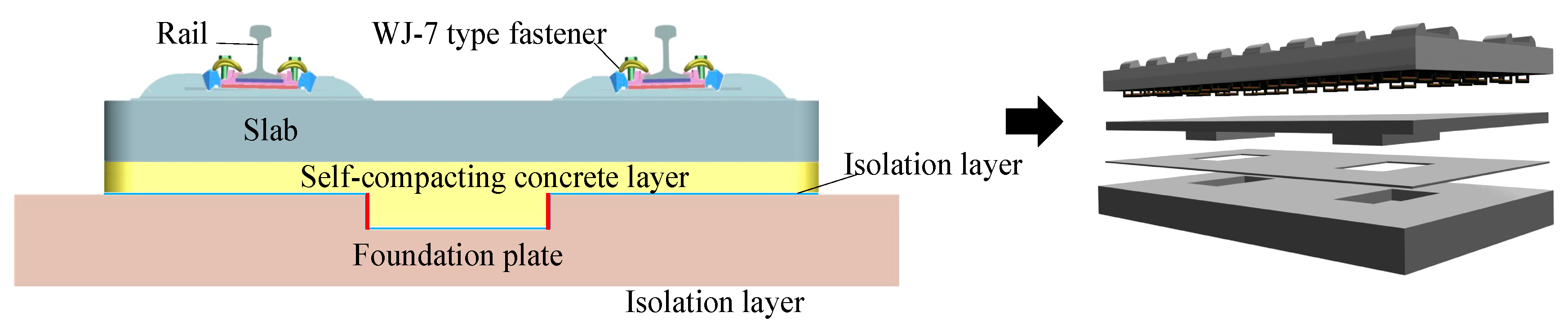
2.1.2. Slab Track Model
2.1.3. Wheel-Rail Contact
2.2. Simulation of Frost Heave in the Dynamic Models
2.2.1. Simulation of Frost Heave in Existing Dynamic Models
- Model-B was built according to the method produced by Yang et al. [24]; the irregularity of rail as well as the contact loss underneath the foundation plate were both imported into the dynamic model, as shown in Figure 5b. Compared with Model-A, this model is more reasonable in the case of a short wavelength of frost heave.
2.2.2. A Novel FEM Model Based on Explicit Algorithm
2.3. Model Validation
2.3.1. Validation of Subgrade Frost Heave Process Calculated by Explicit Algorithm
2.3.2. Validation of Vehicle-Track Dynamics Response
3. Results
3.1. Comparison of Results between Model-A and No Frozen Case
3.2. Comparison of Results between Model-A and Model-B
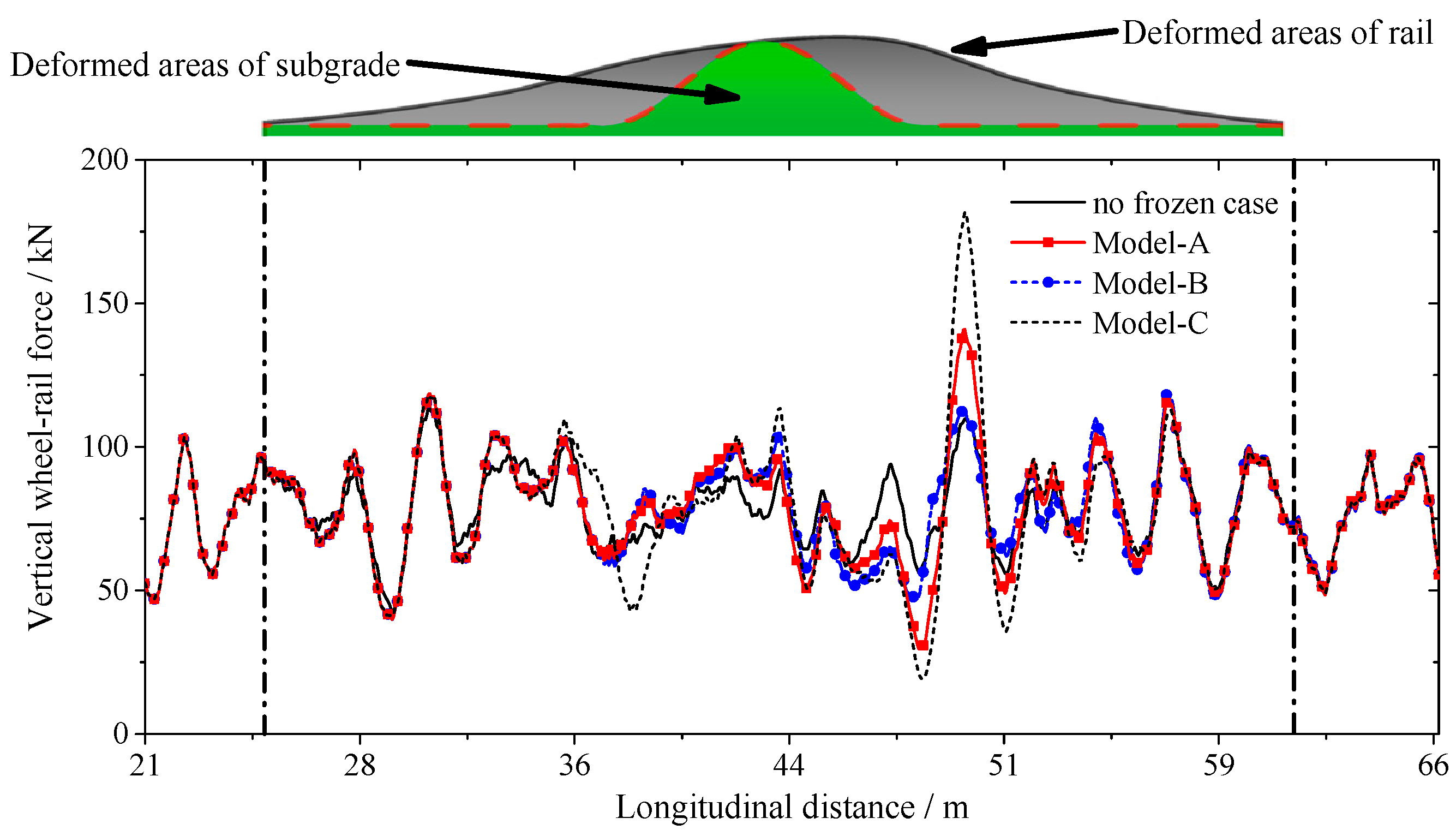
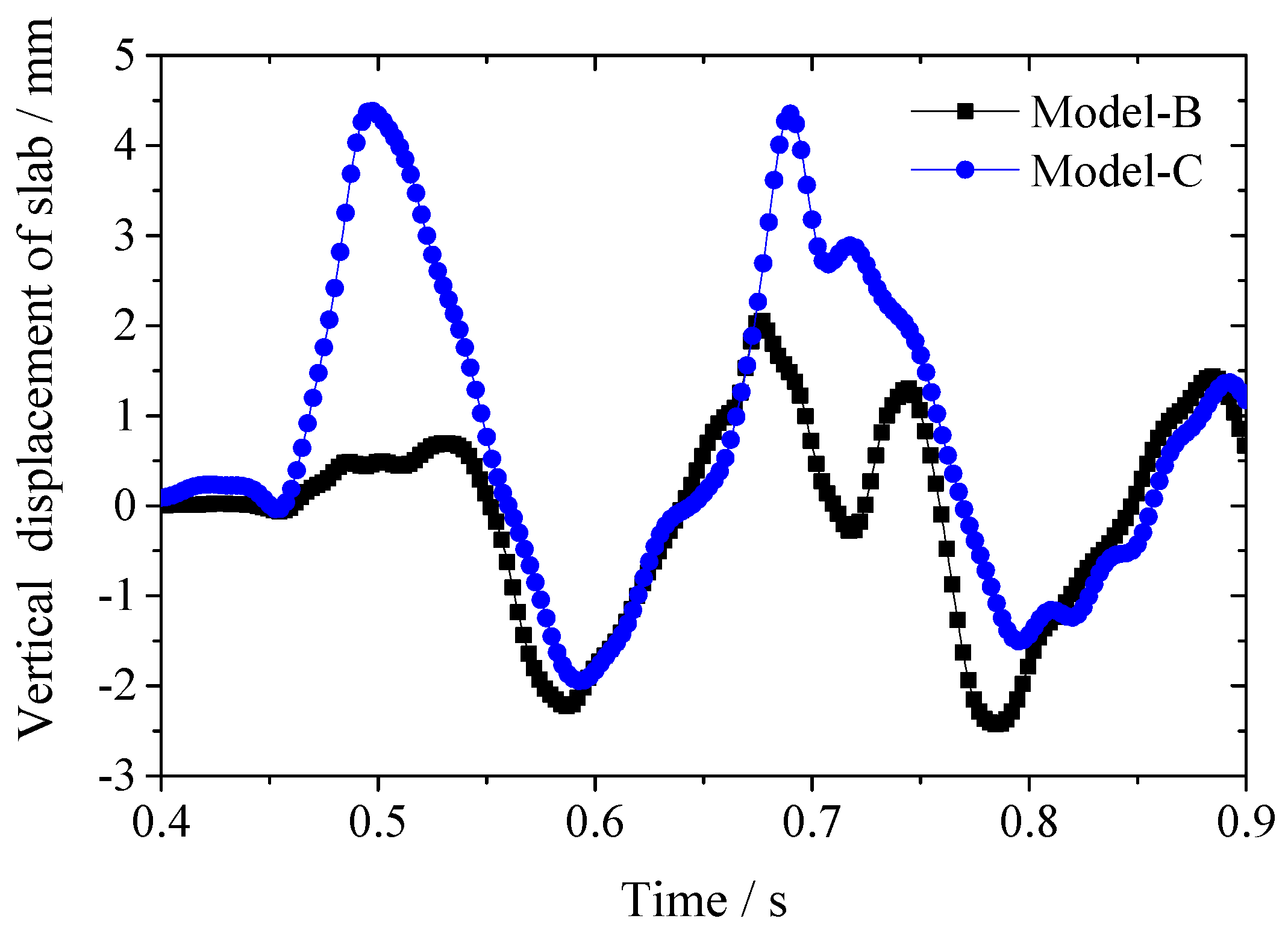
3.3. Comparison of Results between Model-C and Other Models
4. Discussion
4.1. Discussion of the Influencing Mechanism of Frost Heave on Vehicle-Track Coupling System
- (a)
- Track irregularity, which is responsible for the changes in the dynamic response and for determining the length of the affected area of wheel-rail force.
- (b)
- Contact loss area underneath the structure, which may change the dynamic irregularity (increasing or decreasing for different wheelsets) and increase the vibration of the slab track;
- (c)
- Leverage effect of slab track caused by the constraint condition and the bending stiffness itself, which further increases the short-wavelength dynamic irregularity.
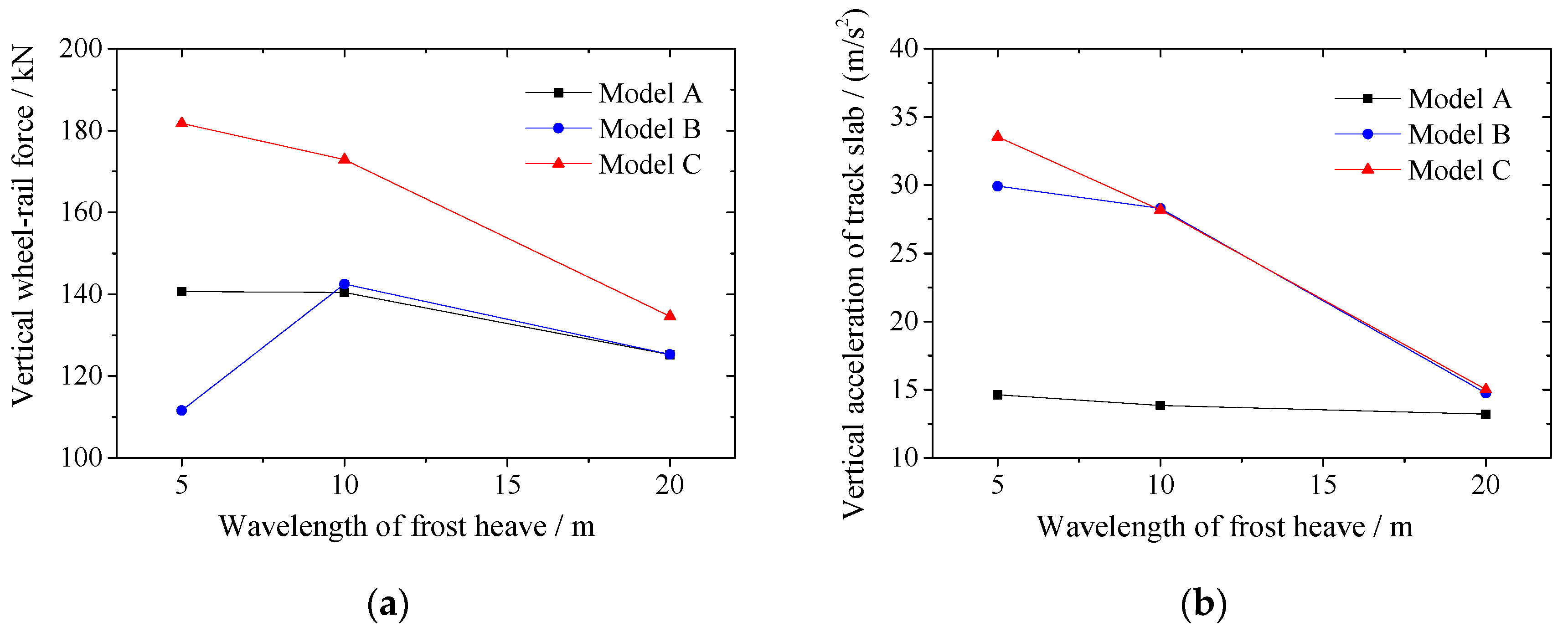
4.2. The Extension of the Influencing Mechanism in Different Ratios of Wavelength to Amplitude
5. Conclusions
- The influencing mechanism of frost heave on the vehicle-track system can be separated into three parts: track irregularity, contact loss area underneath the structure and leverage effect of the bent slab track.
- Track irregularity caused by frost heave produces a fluctuation in the vehicle dynamic response, and the affected distance of track irregularity determines the effect distance of the vehicle dynamics index.
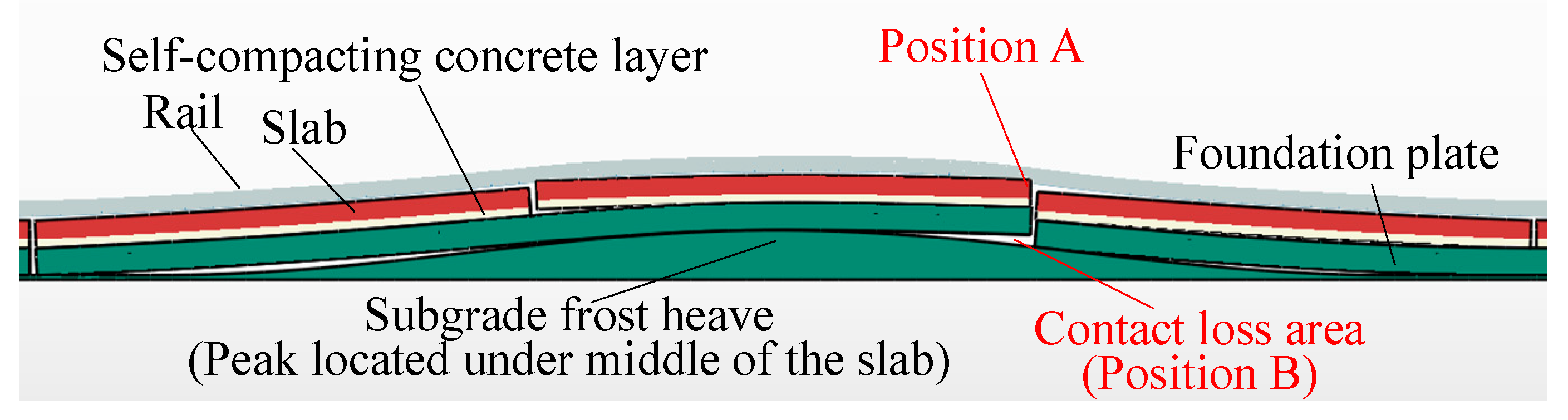
- A short-wavelength frost heave might cause a large amplitude of the contact loss area underneath the slab track. The contact loss area weakens the constraint of the slab track, which also produces an increase in slab track vibration. There is contact pressure in the contact loss area when the vehicle passes by.
- The slab track is lifted by the crest of frost. We observed a leverage effect, which might cause larger dynamic irregularity and lead to a greater dynamic response in the wheel-rail system. The initial bending condition caused by frost heave and the weak vertical constraint of the slab track amplify the leverage effect.
- With the ratio of wavelength to amplitude increasing, the contact loss area and the leverage effect are reduced. The influence mechanism of frost heave on the vehicle-track coupling system gradually tends to be dominated by track irregularity.
Author Contributions
Funding
Conflicts of Interest
References
- Niu, F.; Li, A.; Luo, J.; Lin, Z.; Yin, G.; Liu, M.; Zheng, H.; Liu, H. Soil moisture, ground temperatures, and deformation of a high-speed railway embankment in Northeast China. Cold Reg. Sci. Technol. 2017, 133, 7–14. [Google Scholar] [CrossRef]
- Tong, F.; Gao, L.; Cai, X.; Zhong, Y.; Zhao, W.; Huang, Y. Experimental and Theoretical Determination of the Frost-Heave Cracking Law and the Crack Propagation Criterion of Slab Track with Water in the Crack. Appl. Sci. 2019, 9, 4592. [Google Scholar] [CrossRef]
- Hu, X.; Wu, Y.; Li, X. A Field Study on the Freezing Characteristics of Freeze-Sealing Pipe Roof Used in Ultra-Shallow Buried Tunnel. Appl. Sci. 2019, 9, 1532. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Du, Y.L.; Sun, B.C.; Hao, G.J. Analysis of High-Speed Railway Roadbed Deformation in Seasonally Frozen Region. Appl. Mech. Mater. 2014, 505, 121–124. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, R.; Zhao, X. Frost Heaving Monitoring System and Frost Heaving Rules for the High-Speed Railway Embankment in the Seasonally Frozen Soil Regions. J. Glaciol. Geocryol. 2014, 36, 962–968. [Google Scholar]
- Zhao, S.; Liu, H.; Li, X.M.; Li, A.Y.; Niu, Y.H.; Niu, F.J. Intelligent monitoring system for embankment deformation of high-speed railway in cold regions: Design and implementation. J. Glaciol. Geocryol. 2014, 4, 944–952. [Google Scholar]
- Hou, J.F.; Wang, Y.L.; Feng, J. Field Test Study on Frost-Heave of Subgrade in Seasonal Frozen Region along Haerbin-Dalian Passenger Dedicate Line. Adv. Mater. Res. 2013, 671, 45–49. [Google Scholar] [CrossRef]
- Zhao, G.; Liu, X.; Gao, L.; Cai, X. Characteristic analysis of track irregularity in subgrade frost heave area of harbin-dalian high-speed railway. J. China Railw. Soc. 2016, 38, 105–109. [Google Scholar]
- Hwang, S.H.; Kim, S.-I.; Lee, K.-C.; Jang, S. Effects of Long-Wavelength Track Irregularities Due to Thermal Deformations of Railway Bridge on Dynamic Response of Running Train. Appl. Sci. 2018, 8, 2549. [Google Scholar] [CrossRef]
- Lei, X.; Mao, L. Dynamic response analyses of vehicle and track coupled system on track transition of conventional high speed railway. J. Sound Vib. 2004, 271, 1133–1146. [Google Scholar] [CrossRef]
- Wang, Z.C.; Song, Y.; Jian-Xi, W. Relation between Track Irregularity of Speed-Increased Railway and Dynamic Speed Limits through Simulation. Mech. Eng. J. 2014, 8, 197–200. [Google Scholar] [CrossRef]
- Gao, L.; Zhao, L.; Qu, C.; Cai, X. Analysis on Design Scheme of CRTS Ⅲ Slab Track Structure on Roadbed. J. Tongji Univ. Nat. Sci. 2013, 41, 848–855. [Google Scholar]
- Wang, P.; Gao, L.; Zhao, L.; Qu, C. Study on setting method of position-limitation recess of CRTS Ⅲ slab track on subgrade. J. Eng. Mech. 2014, 161, 221–224. [Google Scholar]
- Zhao, G.; Zhao, L.; Zhang, L.-S. Mechanical Characteristics of Ballastless Track under Subgrade Frost Heaving in High-speed Railway. J. Railw. Eng. Soc. 2017, 227, 53–61. [Google Scholar]
- Niu, F.; Zheng, H.; Li, A. The study of frost heave mechanism of high-speed railway foundation by field-monitored data and indoor verification experiment. Acta Geotech. 2018, 15, 581–593. [Google Scholar] [CrossRef]
- Zhang, S.; Sheng, D.; Zhao, G.; Niu, F.; He, Z. Analysis of frost heave mechanisms in a high-speed railway embankment. Can. Geotech. J. 2016, 53, 520–529. [Google Scholar] [CrossRef]
- Wu, X.; Niu, F.; Lin, Z.; Luo, J.; Zheng, H.; Shao, Z. Delamination frost heave in embankment of high speed railway in high altitude and seasonal frozen region. Cold Reg. Sci. Technol. 2018, 153, 25–32. [Google Scholar] [CrossRef]
- Wang, Q.; Tai, B.; Liu, Z.; Liu, J. Study on the sunny-shady slope effect on the subgrade of a high-speed railway in a seasonal frozen region. Sci. Cold Arid Reg. 2015, 7, 513–519. [Google Scholar]
- Zhang, Y.-Z.; Du, Y.; Sun, B.-C. Temperature distribution analysis of high-speed railway roadbed in seasonally frozen regions based on empirical model. Cold Reg. Sci. Technol. 2015, 114, 61–72. [Google Scholar] [CrossRef]
- Zhao, G. Study on Management Standard of Frost Heaving of Ballastless Track Subgrade on High-speed Railway in Severe Cold Region. J. China Railw. Soc. 2018, 38, 1–8. [Google Scholar]
- Cai, X.; Liang, Y.; Tan, S.; Shen, Y. Deformation and seam characteristics analysis of CRTS I slab ballastless track in subgrade frost heaving zone. J. Beijing Jiaotong Univ. 2017, 41, 7–13. [Google Scholar]
- Cai, X.; Liang, Y.; Xin, T.; Ma, C.; Wang, H. Assessing the effects of subgrade frost heave on vehicle dynamic behaviors on high-speed railway. Cold Reg. Sci. Technol. 2019, 158, 95–105. [Google Scholar] [CrossRef]
- Luo, B.; Lai, H.; Ishikawa, T.; Tokoro, T. Frost heave analysis of ballasted track above box culvert and its influence on train vibration. Sci. Cold Arid Regions. 2017, 9, 0229–0235. [Google Scholar]
- Yang, G.; Gao, L.; Liu, X.; Zhao, W. Research on division standard of subgrade frost heave for CRTS Ⅲ slab track based on dynamic analysis. J. China Railw. Soc. 2017, 39, 111–117. [Google Scholar]
- Ford, R. Differential Ballast Settlement, and Consequent Undulations in Track, Caused by Vehicle-Track Interaction. Veh. Syst. Dyn. 1995, 24, 222–233. [Google Scholar] [CrossRef]
- Lundqvist, A.; Dahlberg, T. Dynamic train/track interaction including model for track settlement evolvement. Veh. Syst. Dyn. 2004, 41, 667–676. [Google Scholar]
- Nguyen, K.; José, M.G.; Gabaldon, F. Dynamic effect of high speed railway traffic loads on the ballast track settlement. In Proceedings of the Congresso de Métodos Numéricos em Engenharia, Coimbra, Portugal, 14 June 2011. [Google Scholar]
- Grossoni, I.; Powrie, W.; Zervos, A.; Bezin, Y.; Le Pen, L. Modelling railway ballasted track settlement in vehicle-track interaction analysis. Transp. Geotech. 2020, 26, 100433. [Google Scholar] [CrossRef]
- Paixão, A.; Fortunato, E.; Calçada, R. The effect of differential settlements on the dynamic response of the train–track system: A numerical study. Eng. Struct. 2015, 88, 216–224. [Google Scholar] [CrossRef]
- Zhao, G.; Gao, L.; Lei, Z.; Zhong, Y. Analysis of dynamic effect of gap under CRTS Ⅱ track slab and operation evaluation. J. China Railw. Soc. 2017, 39, 1–10. [Google Scholar]
- Zhou, J.; Chen, X.; Zhou, J.; Xu, G.; Cai, D. Dynamic Responses of Asphalt Concrete Waterproofing Layer in Ballastless Track. Appl. Sci. 2019, 9, 375. [Google Scholar] [CrossRef]
- Song, Y.; Du, Y.; Zhang, Y.; Sun, Z. Evaluating the Effect of Wheel Polygons on Dynamic Track Performance in High-Speed Railway Systems Using Co-Simulation Analysis. Appl. Sci. 2019, 9, 4165. [Google Scholar] [CrossRef]
- Muñoz, S.; Aceituno, J.F.; Urda, P.; Escalona, J.L. Multibody model of railway vehicles with weakly coupled vertical and lateral dynamics. Mech. Syst. Signal. Process. 2019, 115, 570–592. [Google Scholar] [CrossRef]
- Gao, L.; Qu, C.; Qiao, S.; Cai, X.; Liu, W. Analysis on the influencing factors of mechanical characteristics of jointless turnout group in ballasted track of high-speed railway. Sci. China Ser. E Technol. Sci. 2012, 56, 499–508. [Google Scholar] [CrossRef]
- Jorge, A. Train kinematics for the design of railway vehicle components. Mech Mach. Theory. 2010, 45, 1035–1049. [Google Scholar]
- Zhai, W. Vehicle–Track Dynamics, 5th ed.; Science Press: Beijing, China, 2015. [Google Scholar]
- Li, H.; Wu, G. Fatigue Evaluation of Steel Bridge Details Integrating Multi-Scale Dynamic Analysis of Coupled Train-Track-Bridge System and Fracture Mechanics. Appl. Sci. 2020, 10, 3261. [Google Scholar] [CrossRef]
- Aggestam, E.; Nielsen, J.C.; Bolmsvik, R. Simulation of vertical dynamic vehicle-track interaction using a two-dimensional slab track model. Veh. Syst. Dyn. 2018, 56, 1633–1657. [Google Scholar] [CrossRef]
- Lesgidis, N.; Sextos, A.; Moschen, L.; Gomez, J.S.G.; Pistone, E. Rigorous vehicle-soil-track simulation of high-speed rail through optimization-based model order reduction. Transp. Geotech. 2020, 23, 100350. [Google Scholar] [CrossRef]
- Zeng, Z.; He, X.; Meng, X.; Zhu, K. Experimental study on the mechanical characteristics of CRTS Ⅲ slab ballastless track under train load. J. Railw. Sci. Eng. 2016, 13, 1229–1233. [Google Scholar]
- Poveda, E.; Yu, R.C.; Lancha, J.C.; Ruiz, G. A numerical study on the fatigue life design of concrete slabs for railway tracks. Eng. Struct. 2015, 100, 455–467. [Google Scholar] [CrossRef]
- Madhkhan, M.; Entezam, M.; Torki, M. Mechanical properties of precast reinforced concrete slab tracks on non-ballasted foundations. Sci. Iran. 2012, 19, 20–26. [Google Scholar] [CrossRef]
- Xin, T.; Zhang, Q.; Gao, L.; Zhao, L. Dynamic effects and structure optimization of damping layers of CRTS III slab ballastless track for high speed railway. China Railw. Sci. 2016, 37, 1–7. [Google Scholar]
- Kalker, J.J. On the rolling contact of two elastic bodies in the presence of dry friction. Ph.D. Dissertation, Delft University of Technology, Delft, The Netherlands, 1967. [Google Scholar]
- Ishida, M.; Ban, T.; Iida, K.; Ishida, H.; Aoki, F. Effect of moderating friction of wheel/rail interface on vehicle/track dynamic behaviour. Wear 2008, 265, 1497–1503. [Google Scholar] [CrossRef]
- Yankovskii, A. Modelling of the elastoplastic dynamics of longitudinally reinforced wall beams based on a time-explicit central difference method. J. Appl. Math. Mech. 2017, 81, 36–51. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Values |
|---|---|---|
| Car body/bogie/wheelset mass | kg | 48,000/3200/2400 |
| Car body rolling/nodding/yawing inertia | 105 kg × m2 | 1.15/2.70/2.70 |
| Bogie rolling/nodding/yawing inertia | kg × m2 | 3200/7200/6800 |
| Wheelset rolling/ yawing inertia | kg × m2 | 1200/1200 |
| Longitudinal/lateral/vertical stiffness of primary suspension | 103 kN/m | 9.00/3.00/1.04 |
| Longitudinal/lateral/vertical damping of primary suspension | kN × s/m | 0/0/45 |
| Longitudinal/lateral/vertical stiffness of secondary suspension | 103 kN/m | 0.24/0.24/0.40 |
| Longitudinal/lateral/vertical damping of secondary suspension | kN × s/m | 500/30/50 |
| Axle distance | m | 2.50 |
| Bogie distance | m | 17.375 |
| Wheel rolling radius | m | 0.46 |
| Parts | Parameters | Units | Values |
|---|---|---|---|
| Rail | Density | kg/m3 | 7830 |
| Elastic modulus | GPa | 205 | |
| Poisson’s ratio | / | 0.30 | |
| Slab | Size | m | 5.60 × 2.50 × 0.21 |
| Density | kg/m3 | 2500 | |
| Elastic modulus | GPa | 36.50 | |
| Poisson’s ratio | / | 0.20 | |
| Self-compacting concrete layer | Depth | m | 0.10 |
| Density | kg/m3 | 2500 | |
| Elastic modulus | GPa | 32.50 | |
| Poisson’s ratio | / | 0.20 | |
| Foundation plate | Width × Depth | m | 3.10 × 0.10 |
| Density | kg/m3 | 2500 | |
| Elastic modulus | GPa | 32.5 | |
| Poisson’s ratio | / | 0.20 | |
| Concave groove | Size | m | 0.60 × 0.40 × 0.10 |
| Cushion | Stiffness | kN/mm | 250 |
| Dynamic Response | Measured Results | Model-A | Model-B | Model-C |
|---|---|---|---|---|
| Vertical acceleration of car body(m·s−2) | −0.6–0.8 | −0.36–0.40 | −0.35–0.42 | −0.40–0.44 |
| Lateral wheel-rail force (kN) | −22–31 | −24.5–32.5 | −25.5–32.1 | −27.50–31.7 |
| Peak derailment coefficient | 0.26 | 0.42 | 0.42 | 0.31 |
| Peak rate of wheel load reduction | 0.62 | 0.63 | 0.55 | 0.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, L.; Zhao, W.; Hou, B.; Zhong, Y. Analysis of Influencing Mechanism of Subgrade Frost Heave on Vehicle-Track Dynamic System. Appl. Sci. 2020, 10, 8097. https://doi.org/10.3390/app10228097
Gao L, Zhao W, Hou B, Zhong Y. Analysis of Influencing Mechanism of Subgrade Frost Heave on Vehicle-Track Dynamic System. Applied Sciences. 2020; 10(22):8097. https://doi.org/10.3390/app10228097
Chicago/Turabian StyleGao, Liang, Wenqiang Zhao, Bowen Hou, and Yanglong Zhong. 2020. "Analysis of Influencing Mechanism of Subgrade Frost Heave on Vehicle-Track Dynamic System" Applied Sciences 10, no. 22: 8097. https://doi.org/10.3390/app10228097
APA StyleGao, L., Zhao, W., Hou, B., & Zhong, Y. (2020). Analysis of Influencing Mechanism of Subgrade Frost Heave on Vehicle-Track Dynamic System. Applied Sciences, 10(22), 8097. https://doi.org/10.3390/app10228097