A Novel Joint Localization Method for Acoustic Emission Source Based on Time Difference of Arrival and Beamforming


Abstract
:1. Introduction
2. Principle of TDOA Method and Beamforming Method
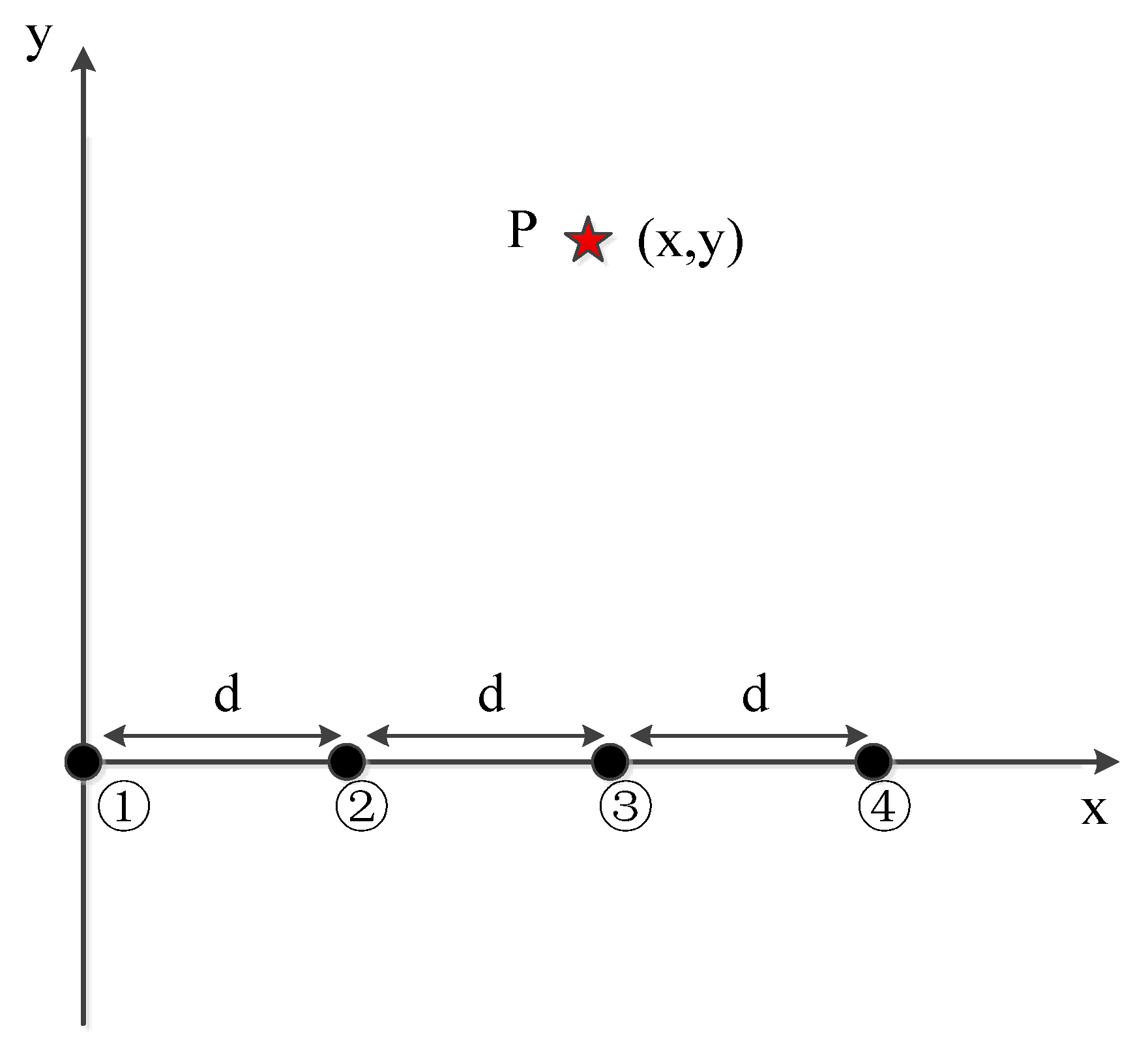
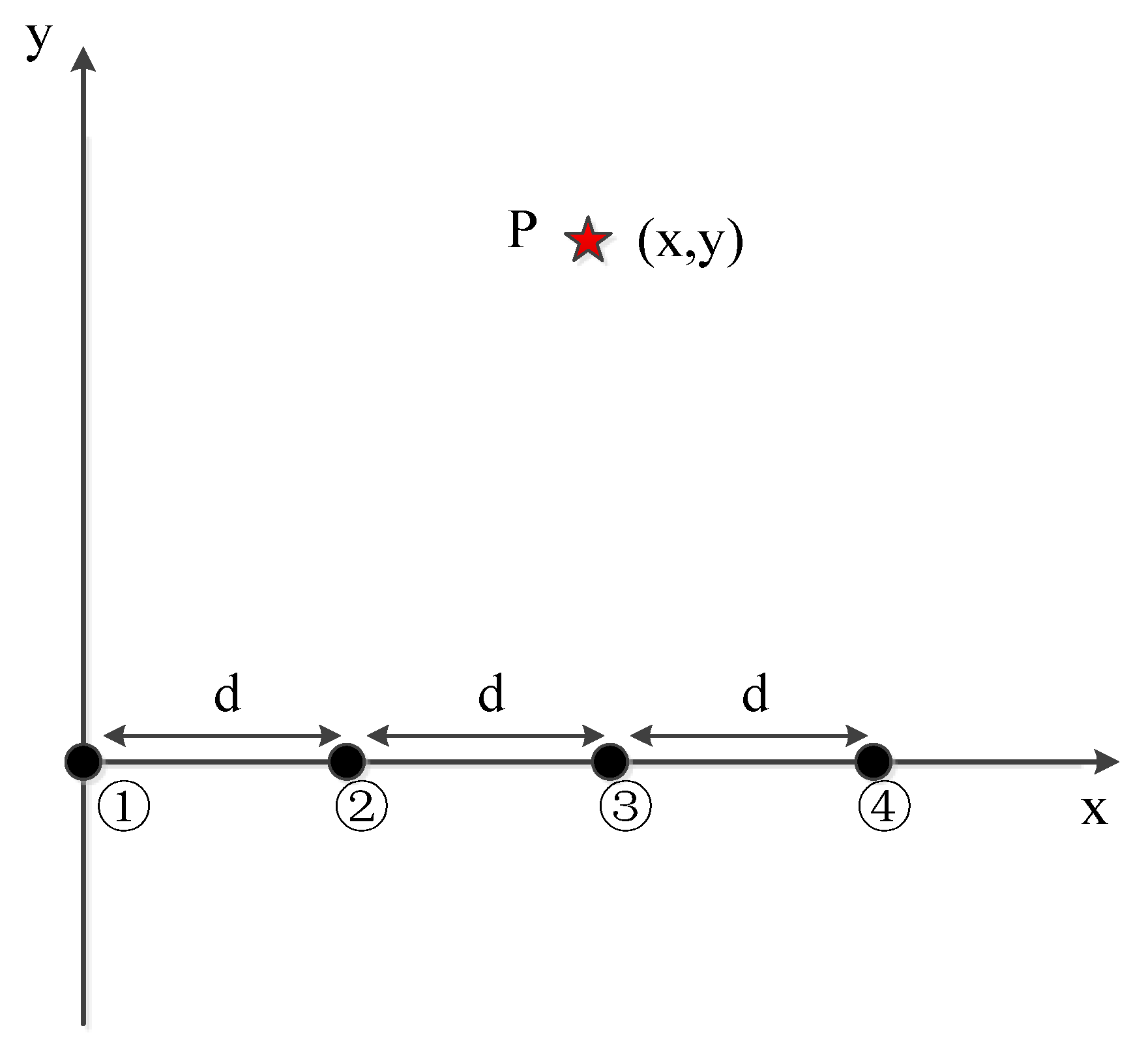
2.1. TDOA Method for Four Sensors
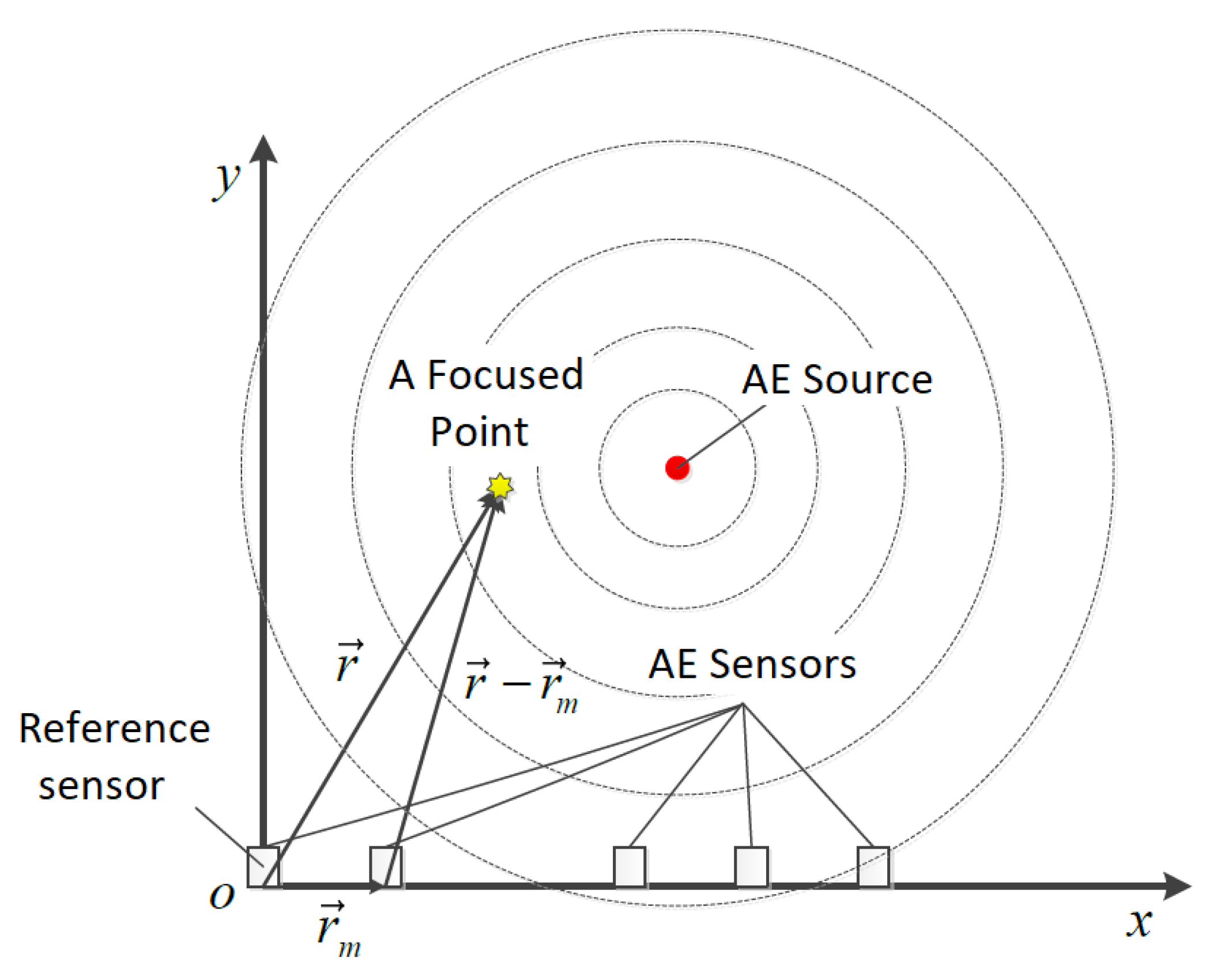
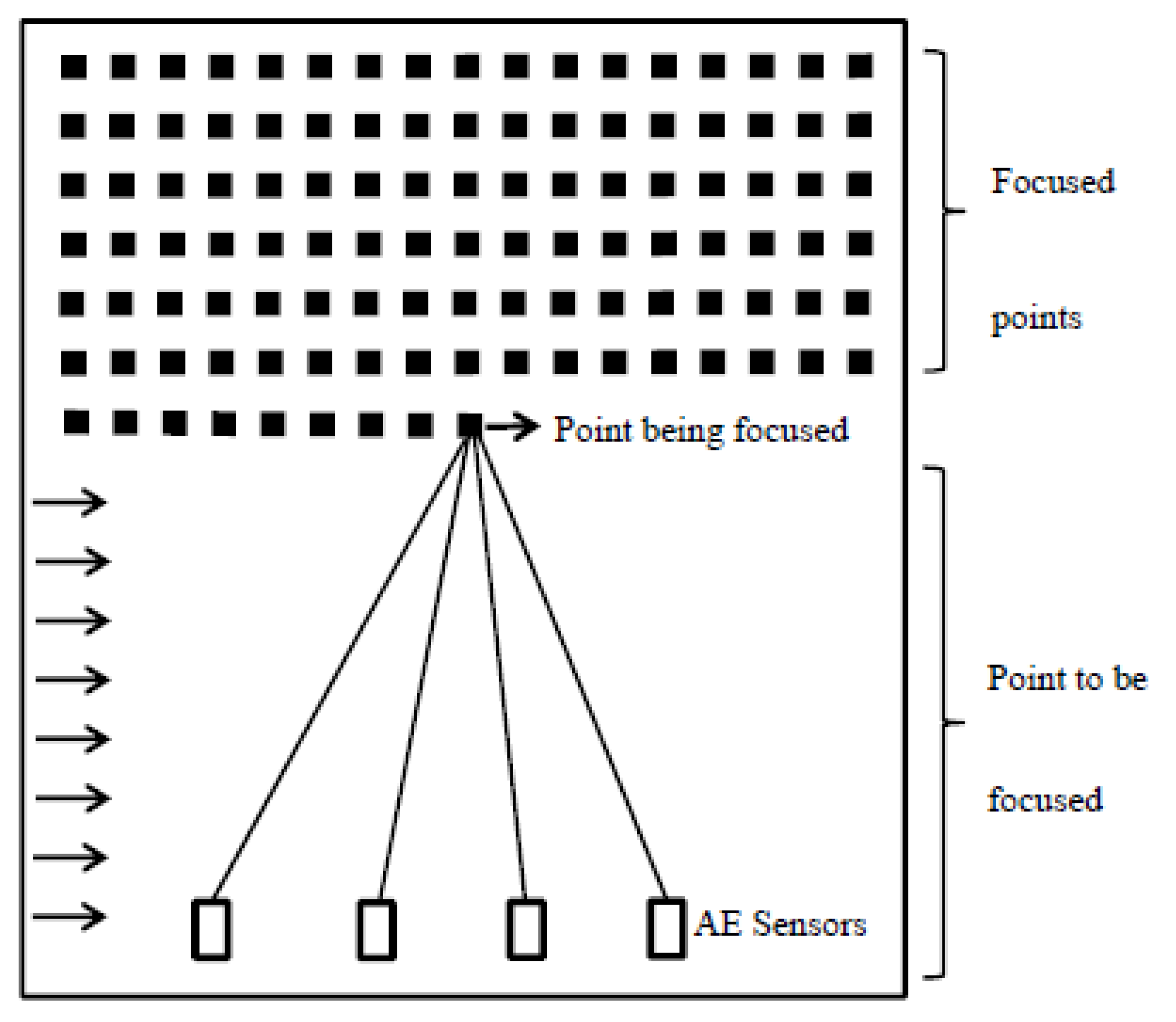
2.2. Beamforming Method
3. Performance Analysis of TDOA Method and Beamforming Method Based on the Simulated Signals
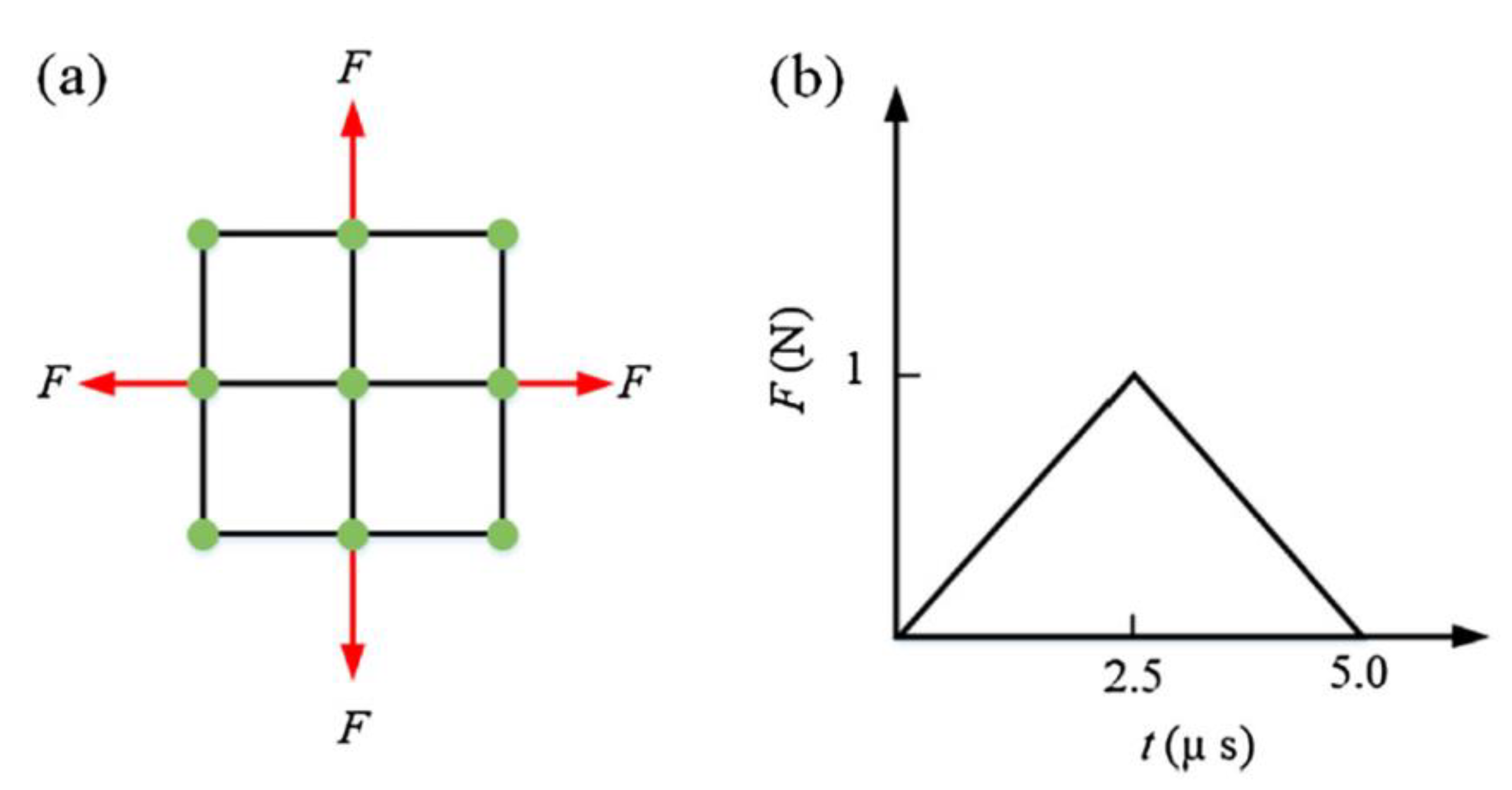
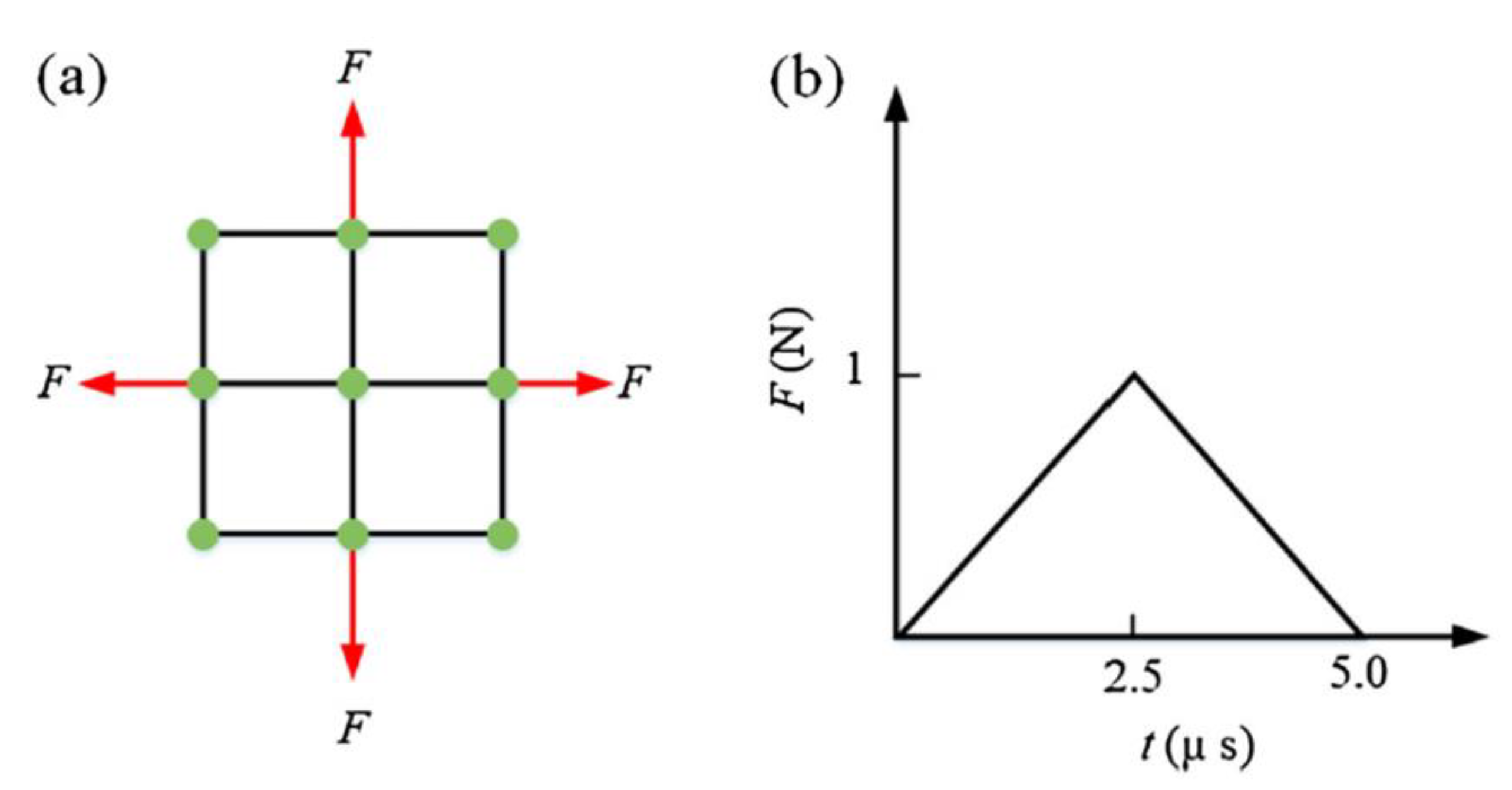
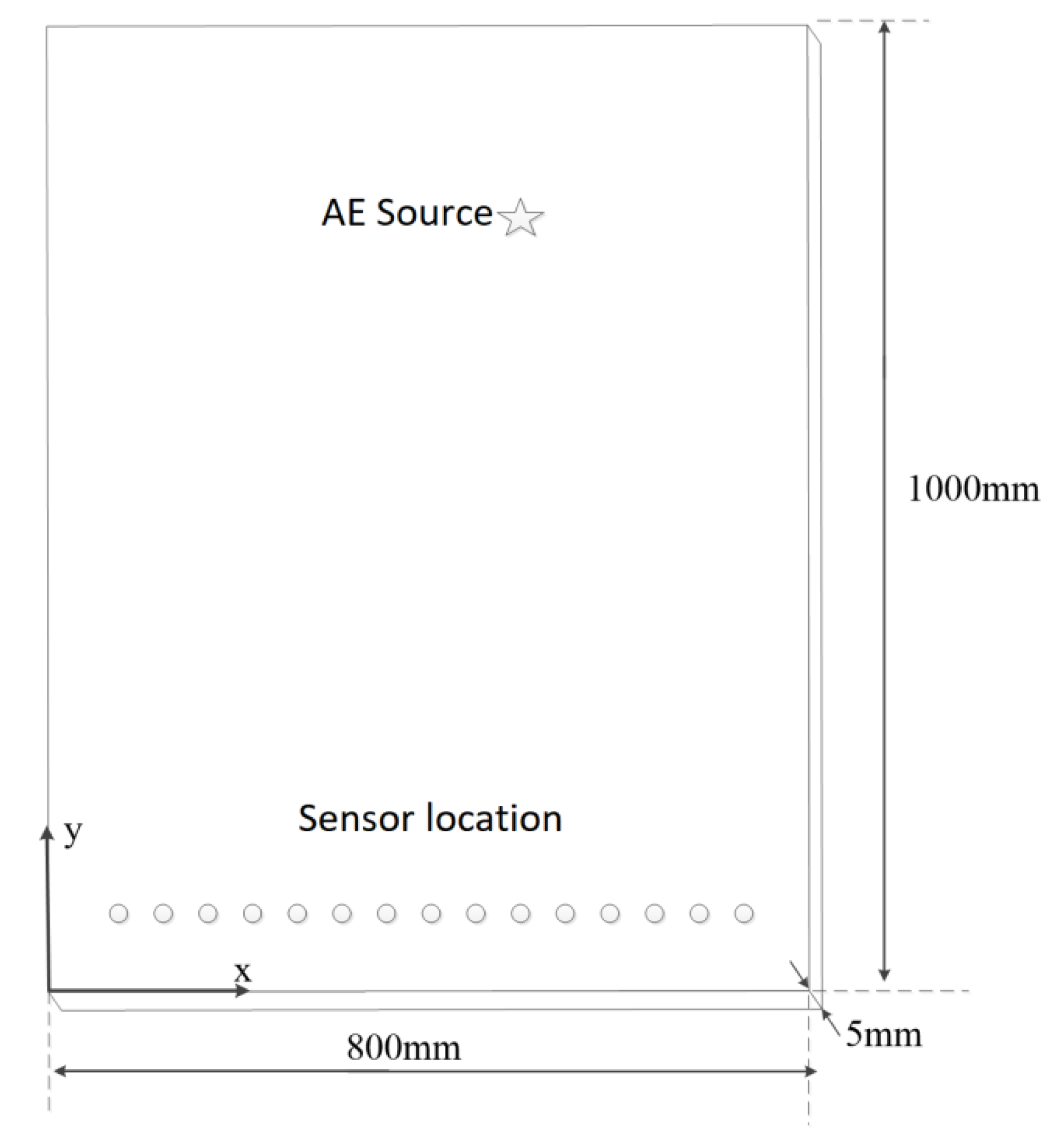
3.1. Simulation of AE Source
3.2. Performance Analysis of TDOA Method
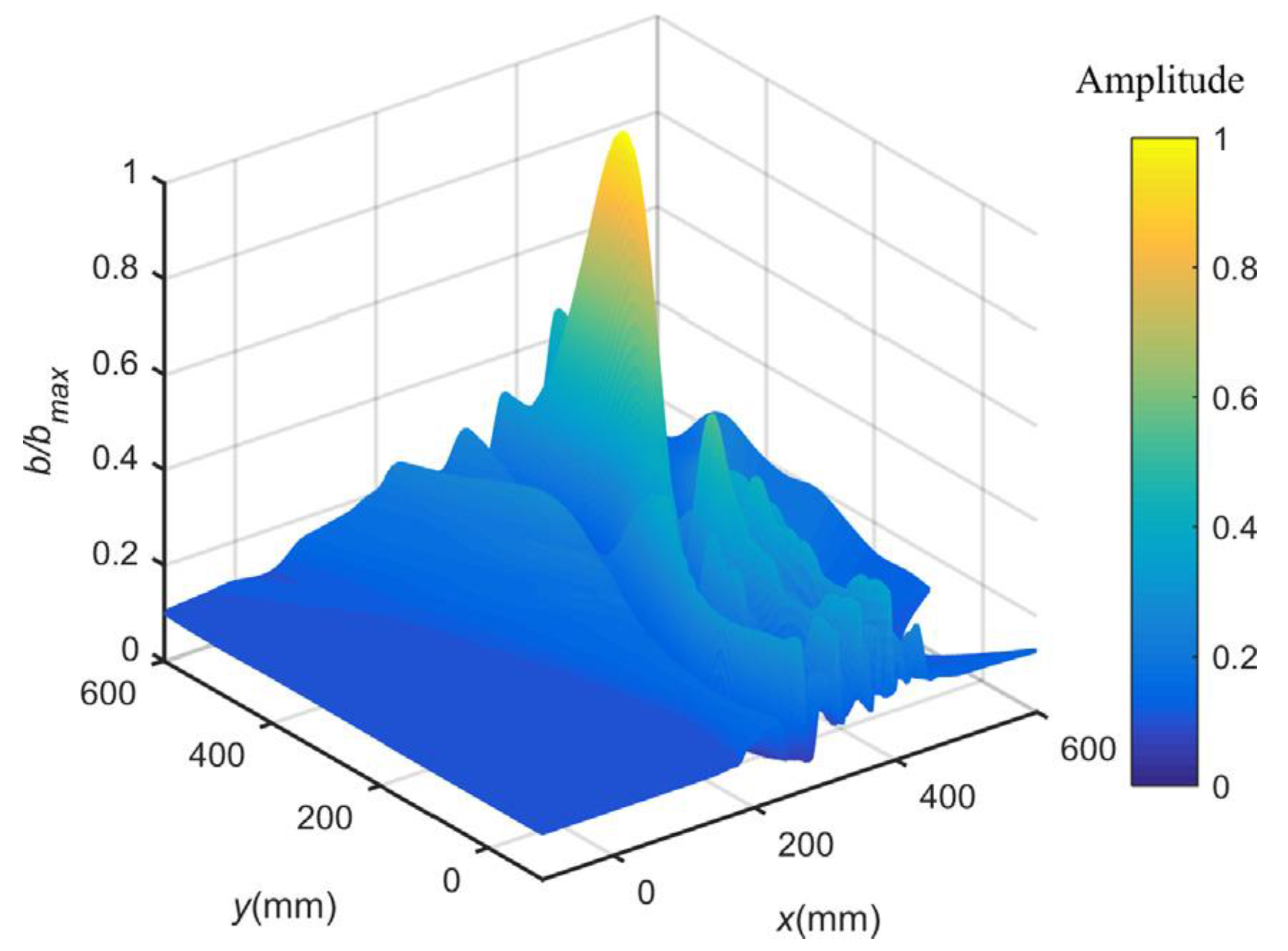
3.3. Performance Analysis of Beamforming Method
4. Joint Localization Method for TDOA and Beamforming
- (1)
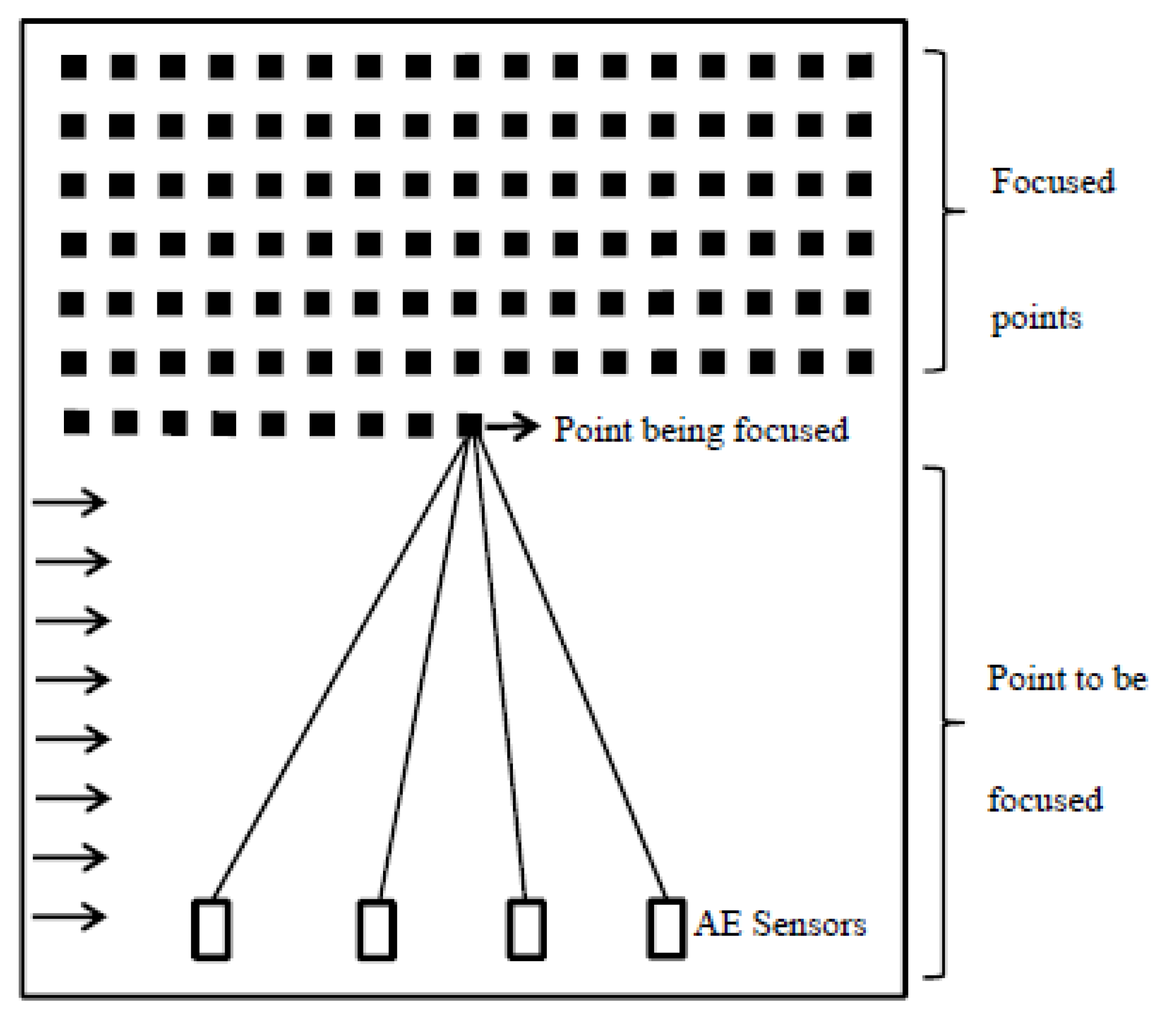
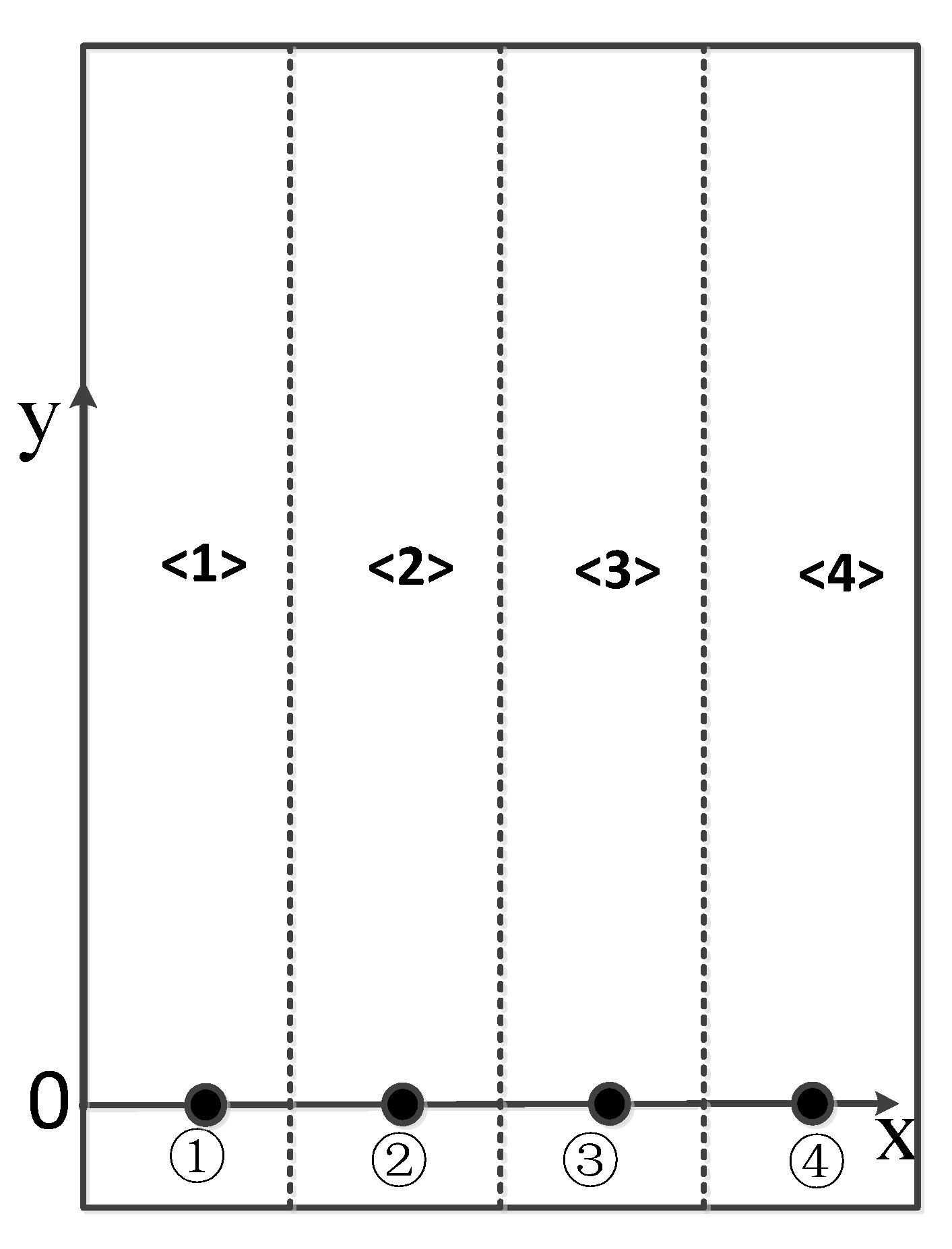
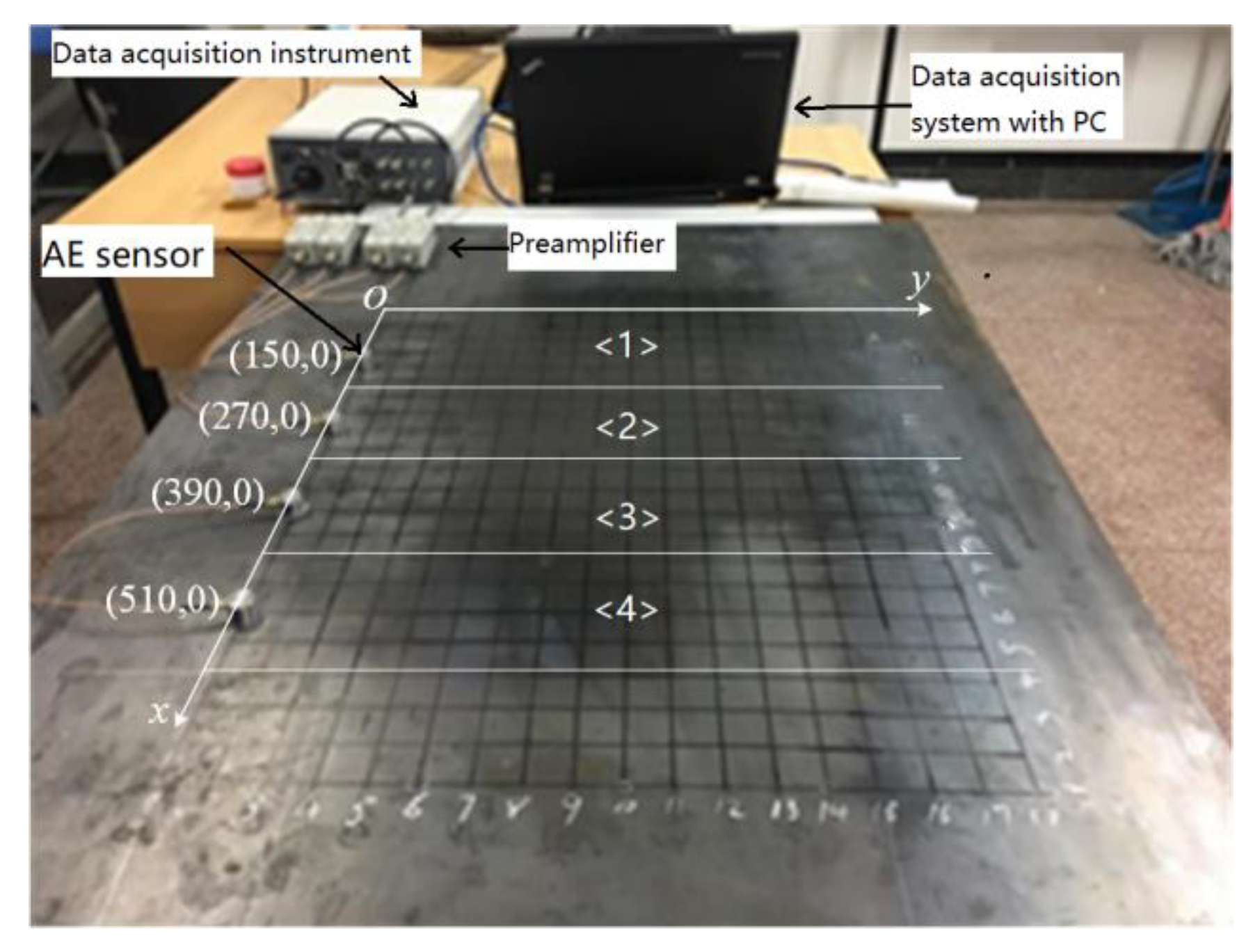
- As shown in Figure 7, four sensors are placed on the plate which is divided according to the midpoint of each two adjacent sensors. Then the plate can be divided into four regions: <1>, <2>, <3>, and <4>. The sensors ➀–➃ are used for TDOA locating. The x-coordinate of the AE source can be obtained.
- (2)
- The localization based on the beamforming method is performed on the corresponding region according to the x coordinate. For example, if the x-coordinate of the TDOA locating is in the region <1>, the region <1> is subjected to the beamforming elaborate scanning for locating.
5. Simulation and Experimental Verification
5.1. Simulation Verification
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wells, R.; Hamstad, M.A.; Mukherjee, A.K. On the origin of the first peak of acoustic emission in 7075 aluminum alloy. J. Mater. Sci. 1983, 18, 1015–1020. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Horn, S. Simulation of lamb wave excitation for different elastic properties and acoustic emission source geometries. J. Acoust. Emiss. 2010, 28, 142–154. [Google Scholar]
- Lin, L.; Chu, F. HHT-based AE characteristics of natural fatigue cracks in rotating shafts. Mech. Syst. Signal Process. 2012, 26, 181–189. [Google Scholar] [CrossRef]
- Wang, Q.; Chu, F. Experimental determination of the rubbing location by means of acoustic emission and wavelet transform. J. Sound Vibr. 2001, 248, 91–103. [Google Scholar] [CrossRef]
- Kundu, T.; Das, S.; Martin, S.A.; Jata, K.V. Locating point of impact in anisotropic fiber reinforced composite plates. Ultrasonics 2008, 48, 193–201. [Google Scholar] [CrossRef] [PubMed]
- Kundu, T. Acoustic Source Localization. Ultrasonics 2014, 54, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Tobias, A. Acoustic-Emission Source Location in Two Dimensions by an Array of Three Sensors. Non-Destr. Test. 1976, 9, 9–12. [Google Scholar] [CrossRef]
- Ahadi, M.; Bakhtiar, M.S. Leak Detection in Water-Filled Plastic Pipes through the Application of Tuned Wavelet Transforms to Acoustic Emission Signals. Appl. Acoust. 2010, 71, 634–639. [Google Scholar] [CrossRef]
- McLaskey, G.C.; Glaser, S.D.; Grosse, C.U. Beamforming Array Techniques for Acoustic Emission Monitoring of Large Concrete Structures. J. Sound Vib. 2010, 329, 2384–2394. [Google Scholar] [CrossRef]
- He, T.; Pan, Q.; Liu, Y.; Liu, X.; Hu, D. Near-field beamforming analysis for acoustic emission source localization. Ultrasonics 2012, 52, 587–592. [Google Scholar] [CrossRef] [PubMed]
- Nakatani, H.; Hajzargarbashi, T.; Ito, K.; Kundu, T.; Takeda, N. Impact localization on a cylindrical plate by near-field beamforming analysis. In Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2012; International Society for Optical Engineering: San Diego, CA, USA, 2012; Volume 8345, p. 83450Y. [Google Scholar] [CrossRef]
- Nakatani, H.; Hajzargarbashi, T.; Ito, K.; Kundu, T.; Takeda, N. Locating Point of Impact On An Anisotropic Cylindrical Surface Using Acoustic Beamforming Technique. Key Eng. Mater. 2013, 558, 331–340. [Google Scholar] [CrossRef]
- Kundu, T.; Das, S.; Jata, K.V. Point of impact prediction in isotropic and anisotropic plates from the acoustic emission data. J. Acoust. Soc. Am. 2007, 122, 2057–2066. [Google Scholar] [CrossRef] [PubMed]
- Kundu, T.; Das, S.; Jata, K.V. Detection of the Point of Impact on a Stiffened Plate by the Acoustic Emission Technique. Smart Mater. Struct. 2009, 18, 35006. [Google Scholar] [CrossRef]
- Hajzargerbashi, T.; Kundu, T.; Bland, S. An Improved Algorithm for Detecting Point of Impact in Anisotropic Inhomogeneous Plates. Ultrasonics 2011, 51, 317–324. [Google Scholar] [CrossRef] [PubMed]
- Koabaz, M.; Hajzargarbashi, T.; Kundu, T.; Deschamps, M. Locating the Acoustic Source in An Anisotropic Plate. Struct. Health Monit. 2011, 11, 315–323. [Google Scholar] [CrossRef]
- Kundu, T. A New Technique for Acoustic Source Localization in an Anisotropic Plate without Knowing Its Material Properties. In Proceedings of the 6th European Workshop on Structural Health Monitoring, Dresden, Germany, 3–6 July 2012; pp. 37–45. [Google Scholar]
- Kundu, T.; Nakatani, H.; Takeda, N. Acoustic Source Localization in Anisotropic Plates. Ultrasonics 2012, 52, 740–746. [Google Scholar] [CrossRef] [PubMed]
- Nakatani, H.; Kundu, T.; Takeda, N. Improving accuracy of acoustic source localization in anisotropic plates. Ultrasonics 2014, 54, 1776–1788. [Google Scholar] [CrossRef] [PubMed]
- He, T.; Xiao, D.; Pan, Q.; Liu, X. Analysis on accuracy improvement of rotor–stator rubbing localization based on acoustic emission beamforming method. Ultrasonics 2014, 54, 318–329. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Xiao, D.; Shan, Y.; Pan, Q.; He, T.; Gao, Y. Solder joint failure localization of welded joint based on acoustic emission beamforming. Ultrasonics 2017, 74, 221–232. [Google Scholar] [CrossRef] [PubMed]
- He, T.; Tai, J.; Shan, Y.; Wang, X.; Liu, X. A Fast Acoustic Emission Beamforming Localization Method Based on Hilbert Curve. Mech. Syst. Signal Process. 2019, 133, 106291. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | E | ρ | V |
|---|---|---|---|
| Value | 209 | 7800 | 0.3 |
| Units | GPa | Kg/m3 | / |
| Sensor Spacing (mm) | Actual Location of #1 (mm) | Localization (mm) | Actual Location of #2 (mm) | Localization (mm) |
|---|---|---|---|---|
| 50 | (300, 600) | (286, 281) | (500, 800) | (650, 762) |
| 100 | (300, 600) | (300, 334) | (500, 800) | (534, 1010) |
| 150 | (300, 600) | (301, 381) | (500, 800) | (495, 757) |
| 200 | (300, 600) | (300, 586) | (500, 800) | (503, 834) |
| AE Source Location | Change in TODA (%) | Change ∆t2 Unchange ∆t3, ∆t4 | Change ∆t3 Unchange ∆t2, ∆t4 | Change ∆t4 Unchange ∆t2, ∆t3 |
|---|---|---|---|---|
| (350, 600) | −10 | N.A. | (345, 310) | (351, 383) |
| −8 | N.A. | (346, 340) | (351, 413) | |
| −6 | N.A. | (347, 377) | (351, 447) | |
| −4 | N.A. | (348, 426) | (350, 488) | |
| −2 | (351, 1020) | (349, 495) | (350, 538) | |
| 2 | (349, 456) | (351, 801) | (350, 683) | |
| 4 | (348, 376) | (352, 1529) | (350, 800) | |
| 6 | (348, 323) | N.A. | (349, 992) | |
| 8 | (347, 284) | N.A. | (349, 1400) | |
| 10 | (347, 253) | N.A. | (349, 5150) | |
| (550, 600) | −10 | (560, 243) | N.A. | (525, 365) |
| −8 | (558, 280) | N.A. | (530, 396) | |
| −6 | (556, 326) | N.A. | (534, 432) | |
| −4 | (554, 386) | N.A. | (539, 476) | |
| −2 | (552, 468) | (554, 1222) | (544, 530) | |
| 2 | (548, 880) | (547, 429) | (556, 696) | |
| 4 | (546, 4811) | (544, 338) | (563, 840) | |
| 6 | N.A. | (542, 279) | (570, 1096) | |
| 8 | N.A. | (540, 236) | (578, 1801) | |
| 10 | N.A. | (538, 202) | N.A. | |
| (750, 600) | −10 | (660, 112) | N.A. | (638, 299) |
| −8 | (675, 168) | N.A. | (653, 330) | |
| −6 | (691, 233) | N.A. | (670, 369) | |
| −4 | (709, 315) | N.A. | (691, 421) | |
| −2 | (728, 427) | (835, 1702) | (717, 492) | |
| 2 | (774, 940) | (702, 372) | (795, 784) | |
| 4 | (802, 2844) | (672, 262) | (861, 1195) | |
| 6 | N.A. | (651, 195) | (965, 4644) | |
| 8 | N.A. | (637, 146) | N.A. | |
| 10 | N.A. | (626, 108) | N.A. |
| Sensor Spacing (mm) | Actual Location of #1 (mm) | Localization (mm) | Actual Location of #2 (mm) | Localization (mm) |
|---|---|---|---|---|
| 50 | (300, 600) | (330, 690) | (500, 800) | (560, 940) |
| 100 | (300, 600) | (300, 610) | (500, 800) | (490, 800) |
| 150 | (300, 600) | (300, 610) | (500, 800) | (500, 820) |
| 200 | (300, 600) | (300, 610) | (500, 800) | (500, 820) |
| Actual Location | TDOA Localization Result (mm) | Beamforming Scanning Region | Beamforming Localization Result (mm) | |
|---|---|---|---|---|
| x (mm) | y (mm) | |||
| 350 | 600 | (350, 614) | <2> | (350, 610) |
| 450 | (450, 614) | <3> | (450, 610) | |
| 550 | (550, 608) | <3> | (550, 610) | |
| 650 | (549, 579) | <4> | (650, 620) | |
| 750 | (647, 571) | <4> | (750, 630) | |
| 350 | 500 | (350, 486) | <2> | (350, 510) |
| 450 | (450, 486) | <3> | (450, 510) | |
| 550 | (550, 508) | <3> | (550, 510) | |
| 650 | (650, 522) | <4> | (650, 520) | |
| 750 | (746, 470) | <4> | (750, 530) | |
| 350 | 400 | (350, 410) | <2> | (350, 410) |
| 450 | (450, 410) | <3> | (450, 410) | |
| 550 | (550, 404) | <3> | (550, 410) | |
| 650 | (649, 390) | <4> | (650, 420) | |
| 750 | (748, 393) | <4> | (760, 440) | |
| 350 | 300 | (350, 284) | <2> | (350, 310) |
| 450 | (450, 284) | <3> | (450, 310) | |
| 550 | (550, 292) | <3> | (550, 310) | |
| 650 | (650, 305) | <4> | (650, 320) | |
| 750 | (750, 294) | <4> | (750, 330) | |
| Actual Location | TDOA Localization Result (mm) | Beamforming Scanning Region | Beamforming Localization Result (mm) | |
|---|---|---|---|---|
| x (mm) | y (mm) | |||
| 100 | 600 | (−42, N.A.) | <1> | (100, 560) |
| 160 | 600 | (113, N.A.) | (160, 590) | |
| 220 | 210 | (215, 71) | <2> | (220, 200) |
| 450 | (220, N.A.) | (220, 440) | ||
| 510 | (196, N.A.) | (220, 500) | ||
| 280 | 270 | (280, 394) | (280, 260) | |
| 390 | (283, 598) | (280, 390) | ||
| 340 | 330 | (343, N.A.) | <3> | (340, 330) |
| 500 | (344, N.A.) | (340, 500) | ||
| 400 | 270 | (402, 224) | (400, 250) | |
| 390 | (403, 253) | (410, 400) | ||
| 560 | 210 | (460, 169) | <4> | (560, 190) |
| 450 | (467, 229) | (570, 450) | ||
| 510 | (454, 212) | (570, 530) | ||
| Localization Accuracy (mm) | Beamforming Method (s) | Joint Localization Method (s) |
|---|---|---|
| 10 | 2.03 | 0.53 |
| 5 | 8.49 | 2.46 |
| 2 | 49.16 | 12.08 |
| 1 | 193.26 | 50.67 |
| 0.5 | 780.19 | 198.16 |
| 0.2 | 4887.19 | 1234.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Liu, X.; He, T.; Tai, J.; Shan, Y. A Novel Joint Localization Method for Acoustic Emission Source Based on Time Difference of Arrival and Beamforming. Appl. Sci. 2020, 10, 8045. https://doi.org/10.3390/app10228045
Wang X, Liu X, He T, Tai J, Shan Y. A Novel Joint Localization Method for Acoustic Emission Source Based on Time Difference of Arrival and Beamforming. Applied Sciences. 2020; 10(22):8045. https://doi.org/10.3390/app10228045
Chicago/Turabian StyleWang, Xiaoran, Xiandong Liu, Tian He, Junfei Tai, and Yingchun Shan. 2020. "A Novel Joint Localization Method for Acoustic Emission Source Based on Time Difference of Arrival and Beamforming" Applied Sciences 10, no. 22: 8045. https://doi.org/10.3390/app10228045
APA StyleWang, X., Liu, X., He, T., Tai, J., & Shan, Y. (2020). A Novel Joint Localization Method for Acoustic Emission Source Based on Time Difference of Arrival and Beamforming. Applied Sciences, 10(22), 8045. https://doi.org/10.3390/app10228045