Active Control Method Based on Equivalent Stiffness and Damping Coefficient for an Electromagnetic Isolation System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
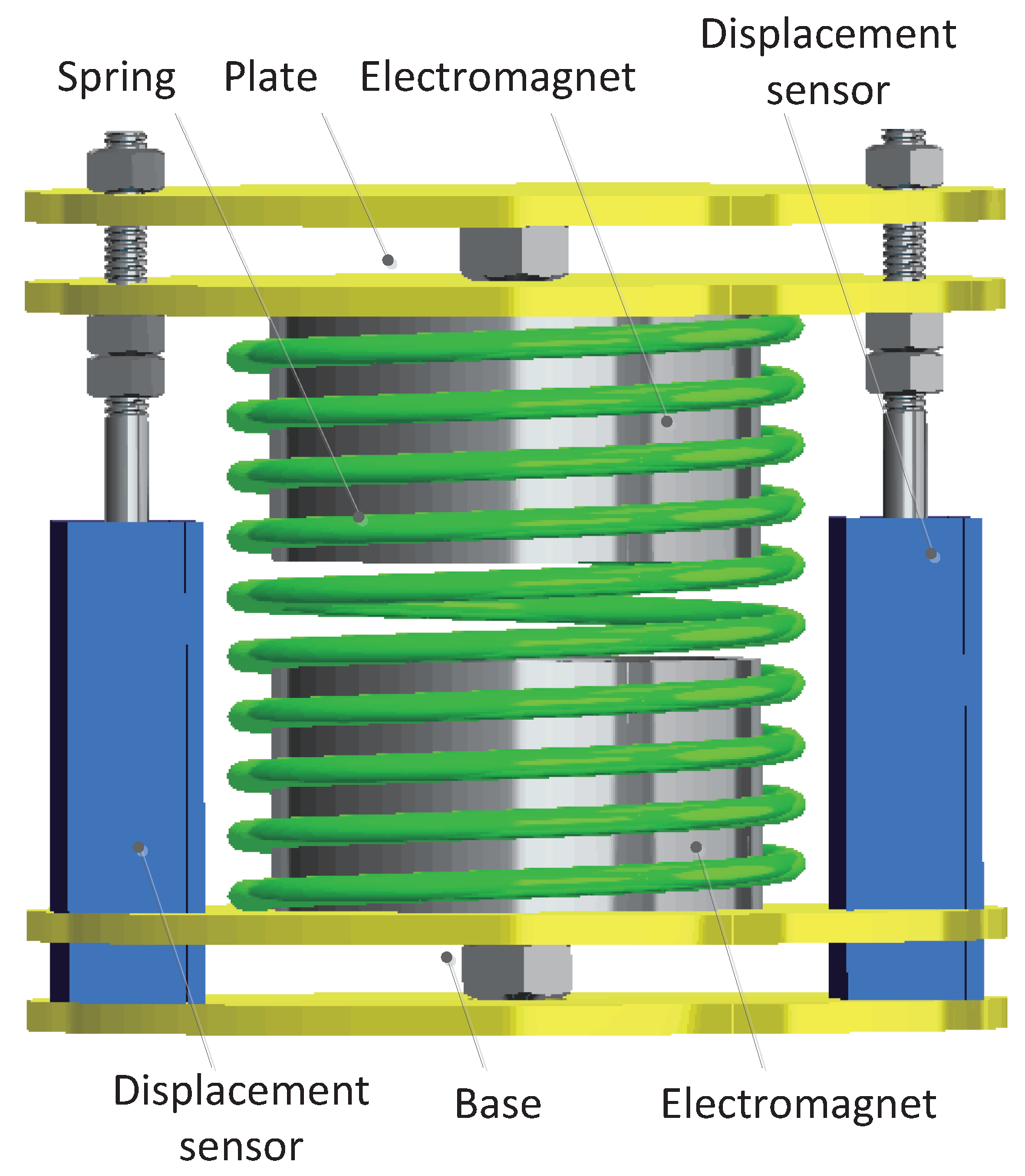
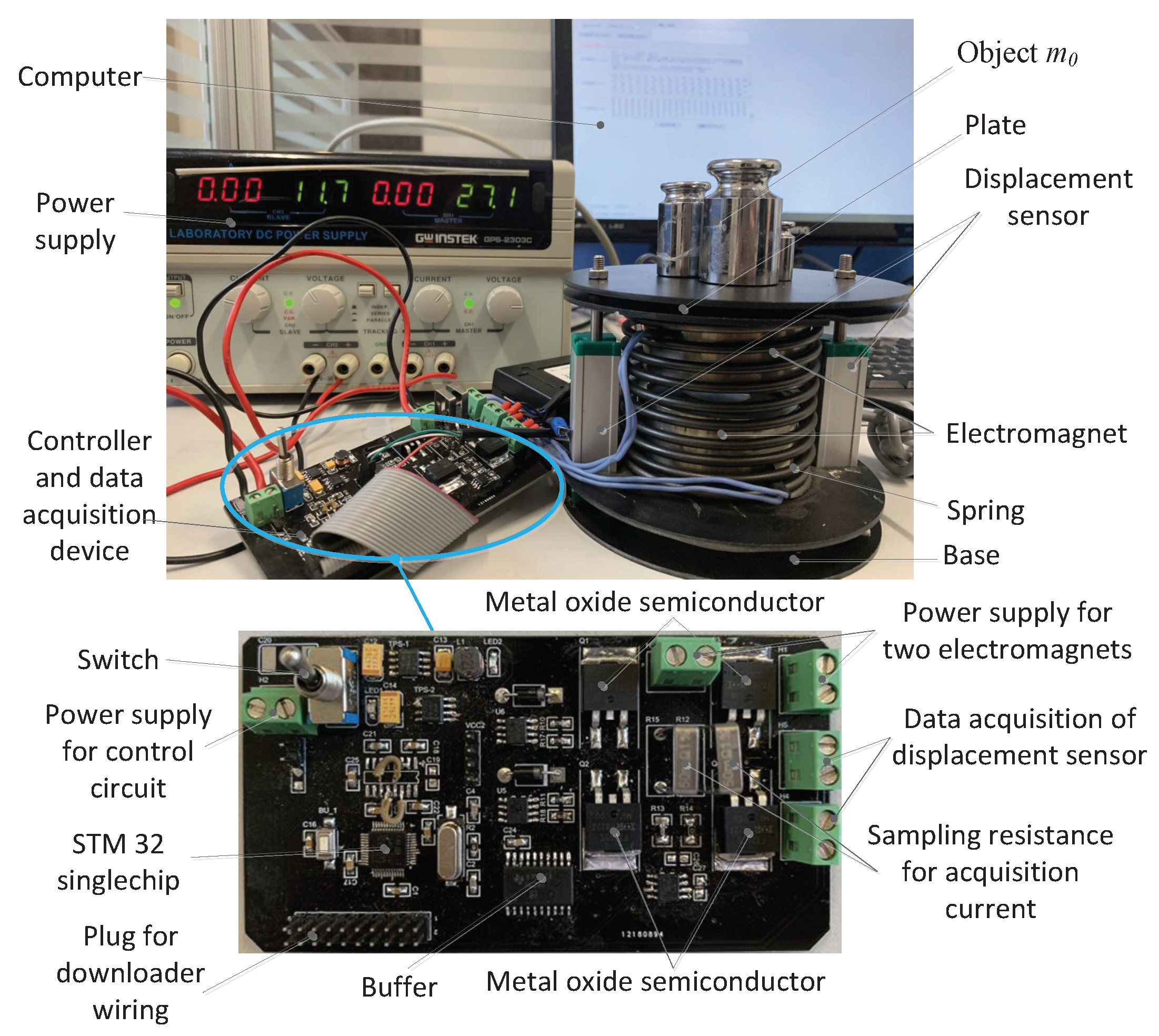
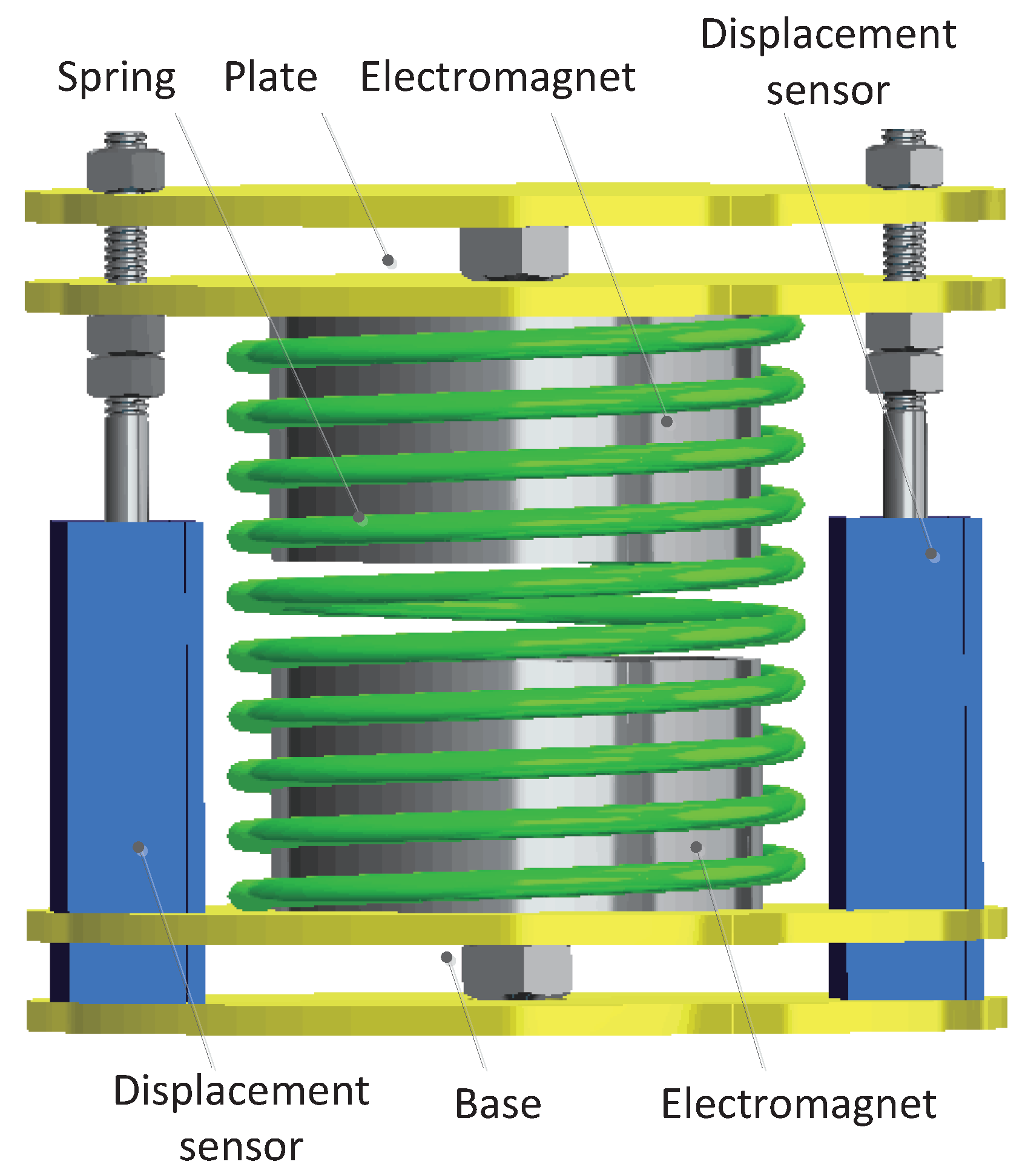
2. Isolation Structure and Electromagnetic Force
3. Performance Indexes of the Electromagnetic Isolation System
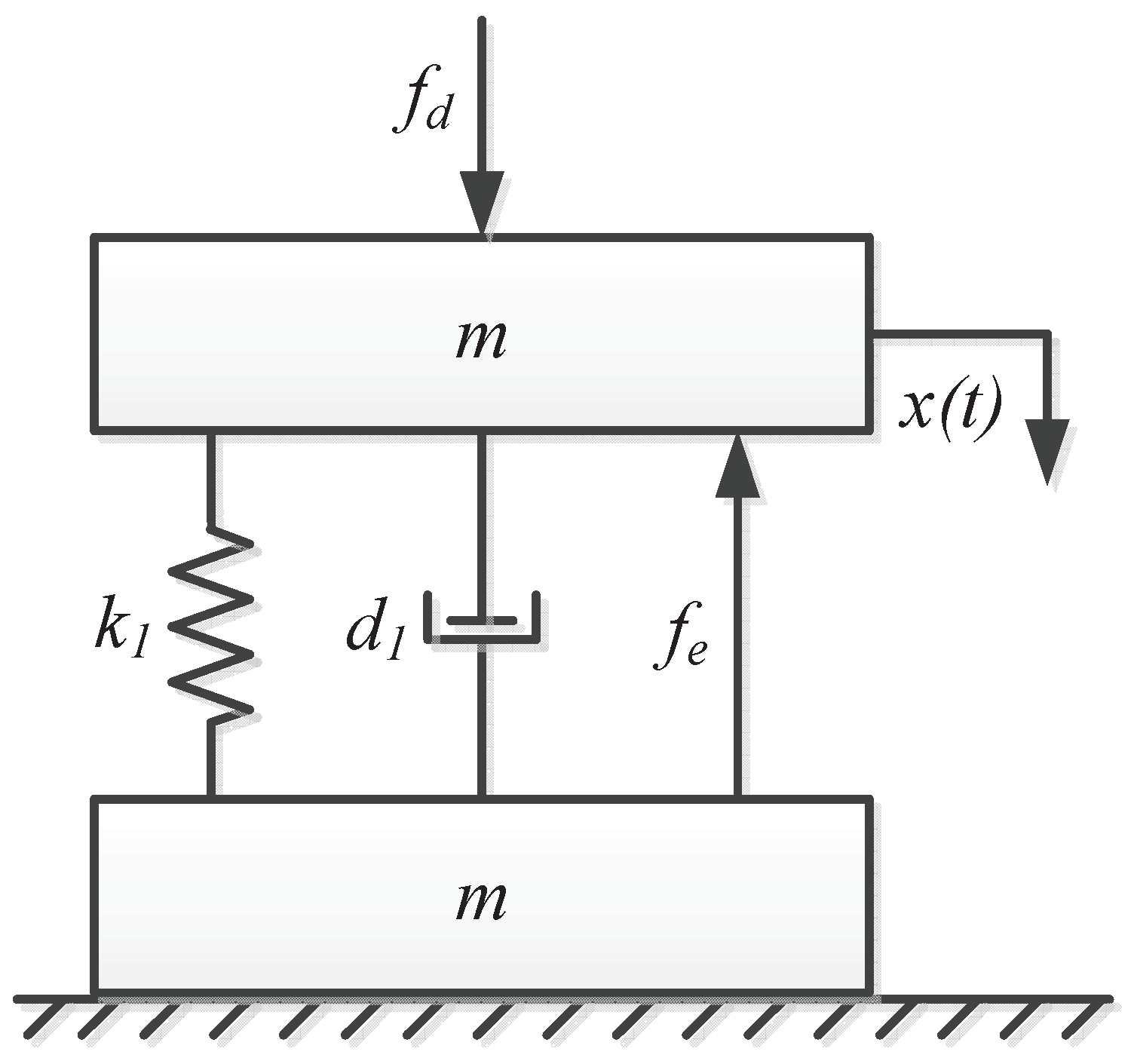
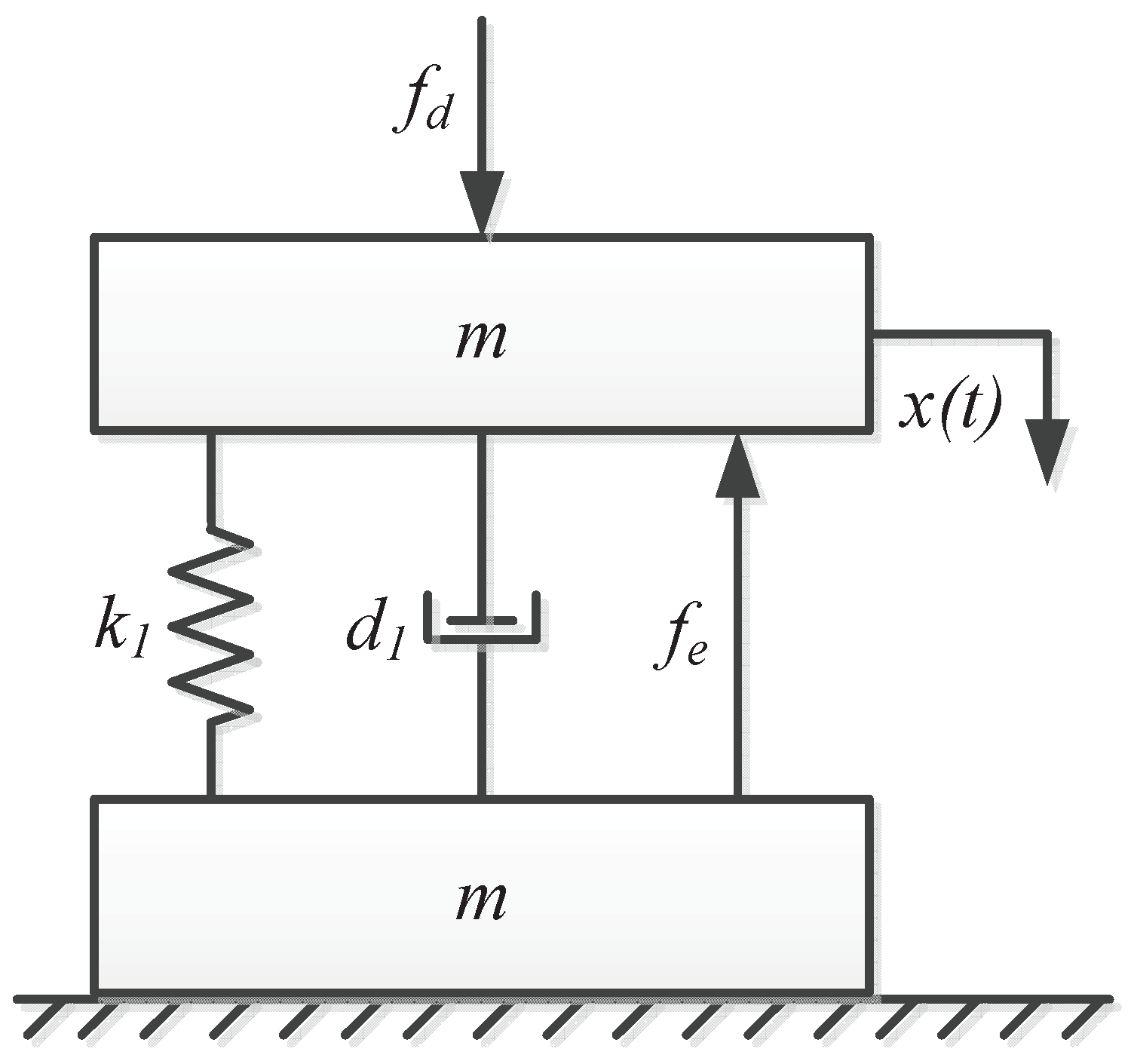
3.1. The Kinetic Equation of an Electromagnetic Isolation System
3.2. Relationship between Current and Stiffness and Damping Coefficient
- (1)
- , in which is the equivalent stiffness of the two electromagnets. It implies that the two electromagnets with the electromagnetic repulsion force can be simplified as a linear spring. Then, Equation (2) can be rewritten as follows:
- (2)
- , in which is the equivalent stiffness of the two electromagnets, is the equivalent damping coefficient of the two electromagnets and is the derivative of x. The can be calculated by , in which is the vibration displacement at time k and T is the control cycle of controller which is equal to .
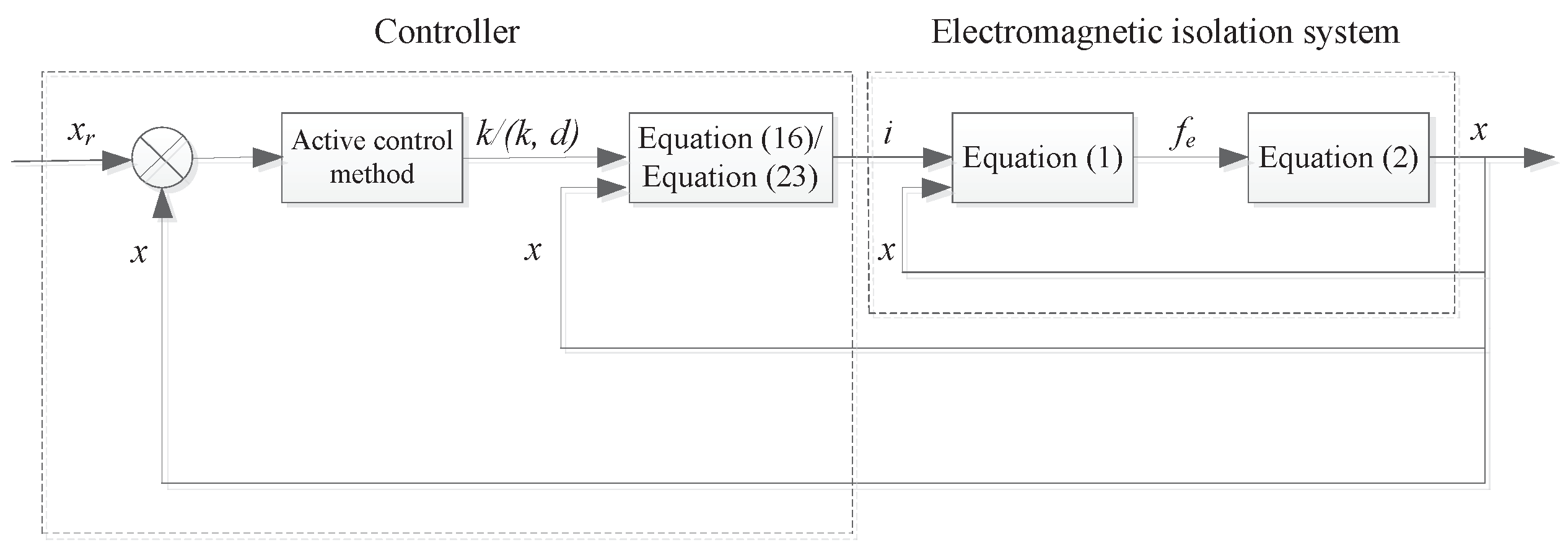
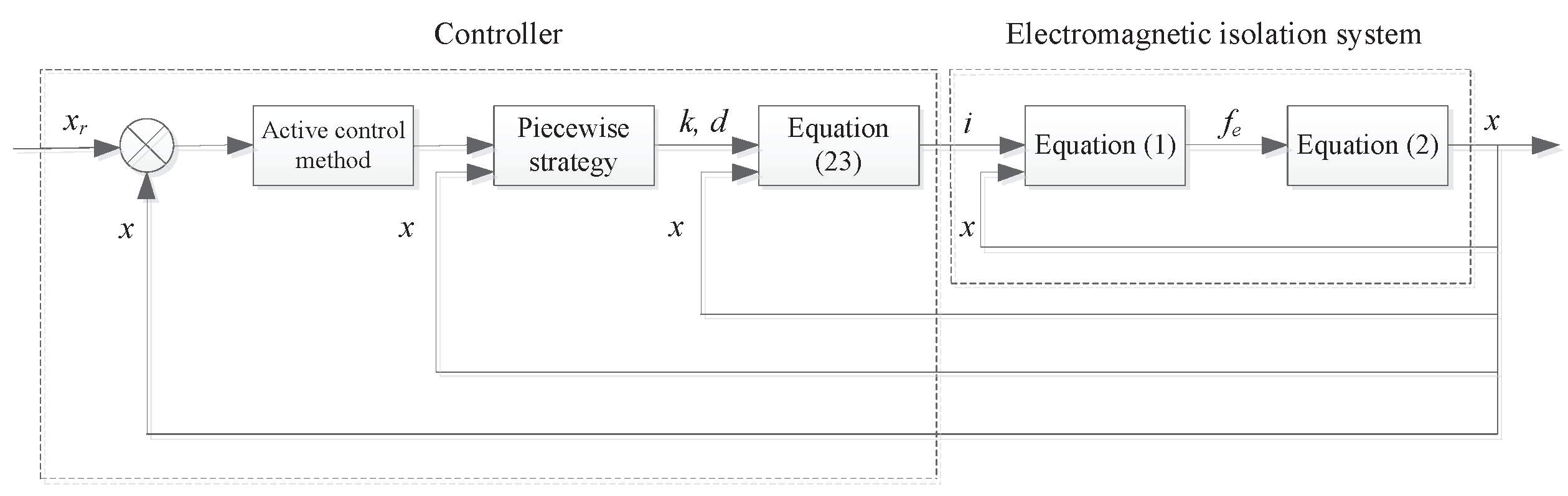
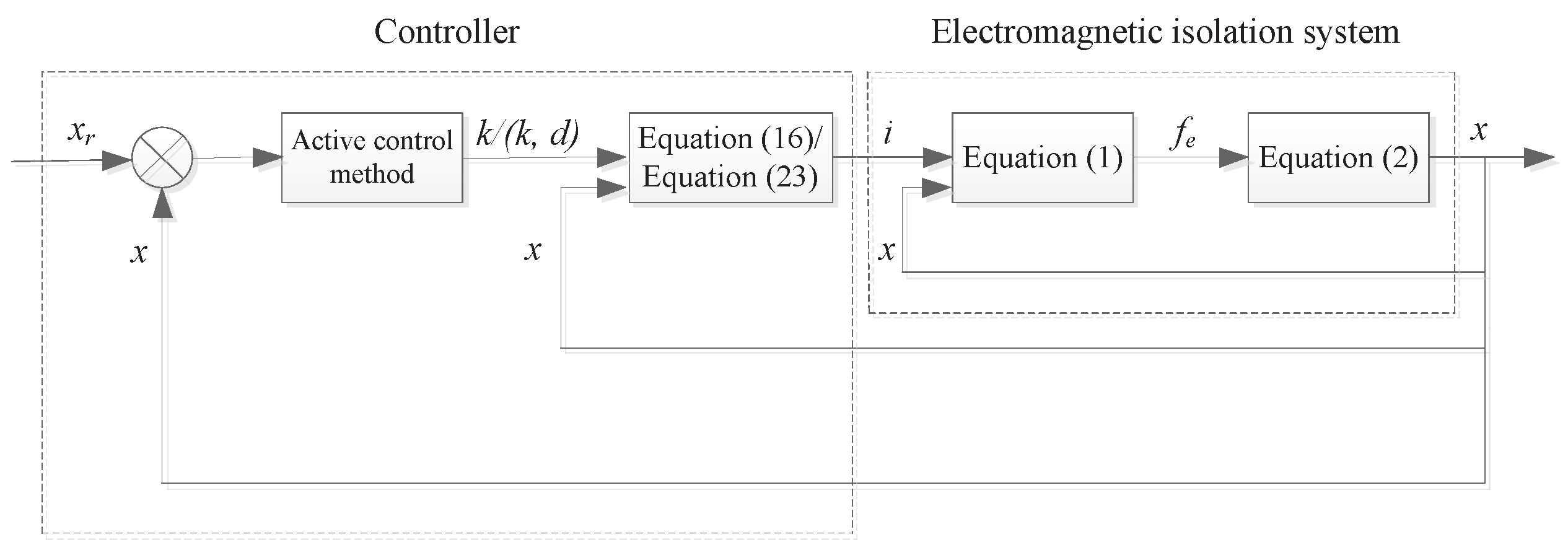
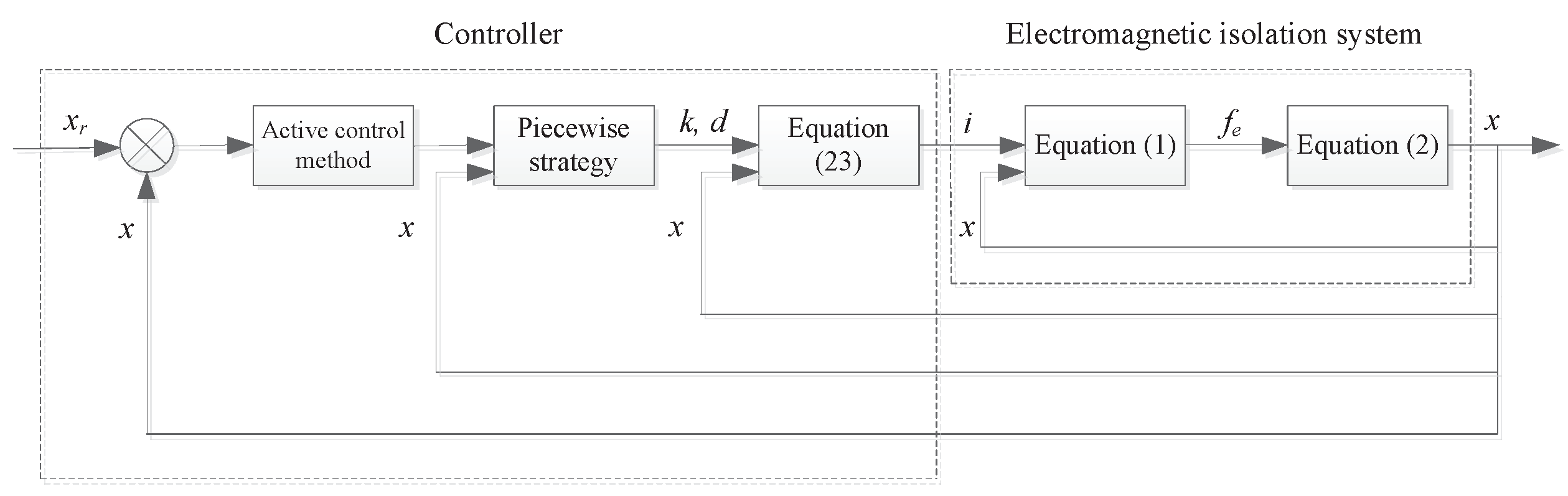
4. The Control Diagram
5. Simulation and Experimentation
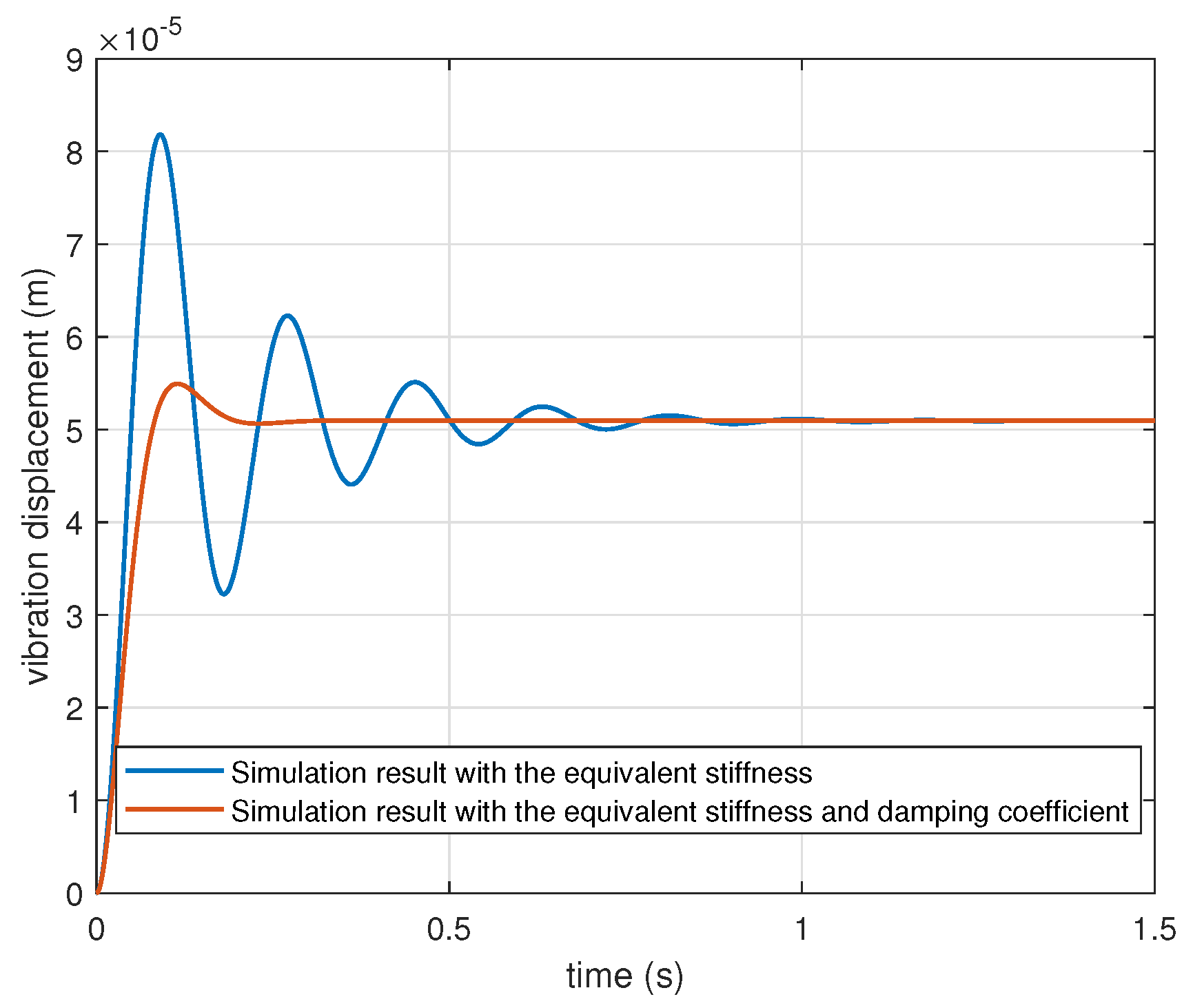
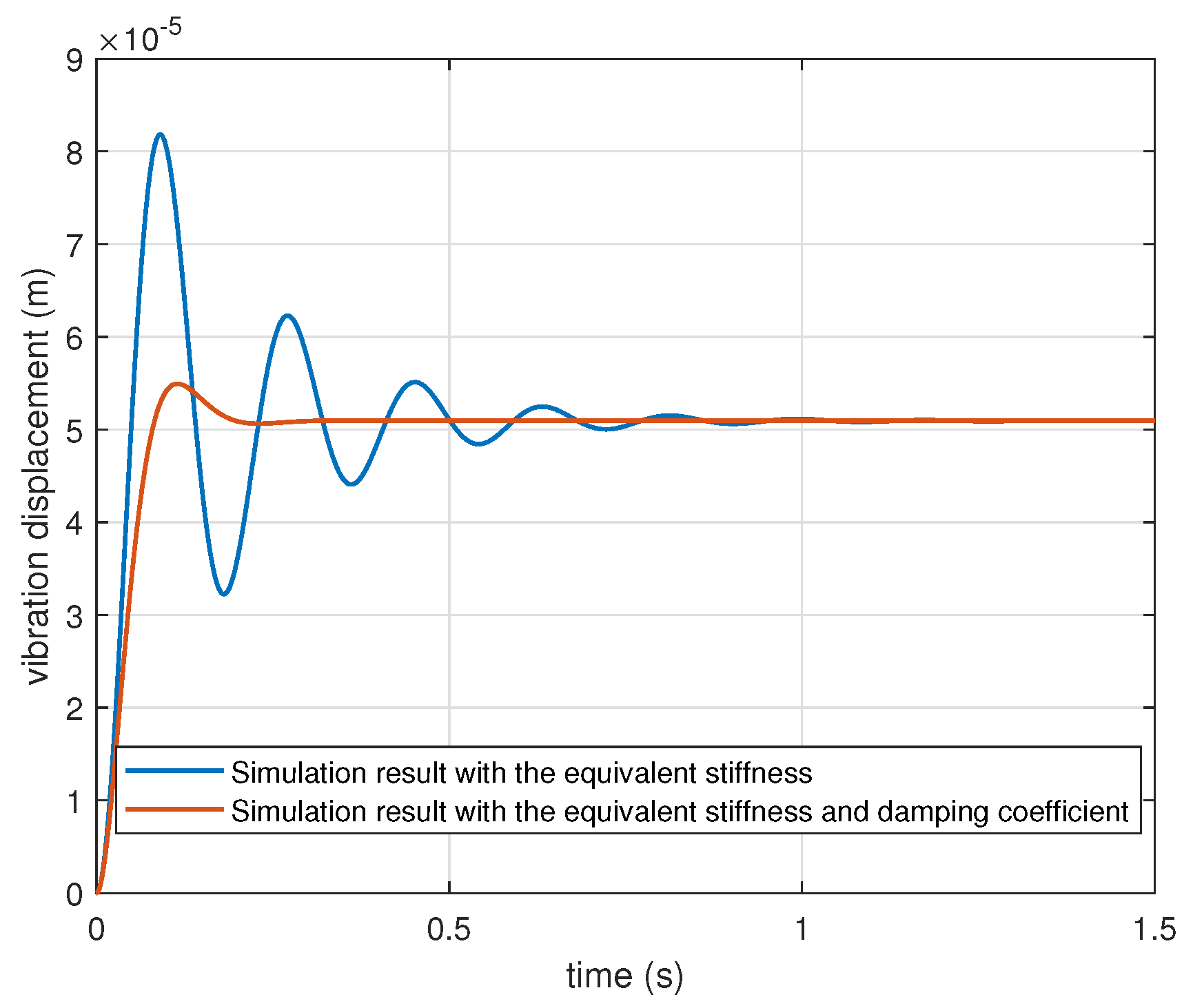
5.1. Simulation Results
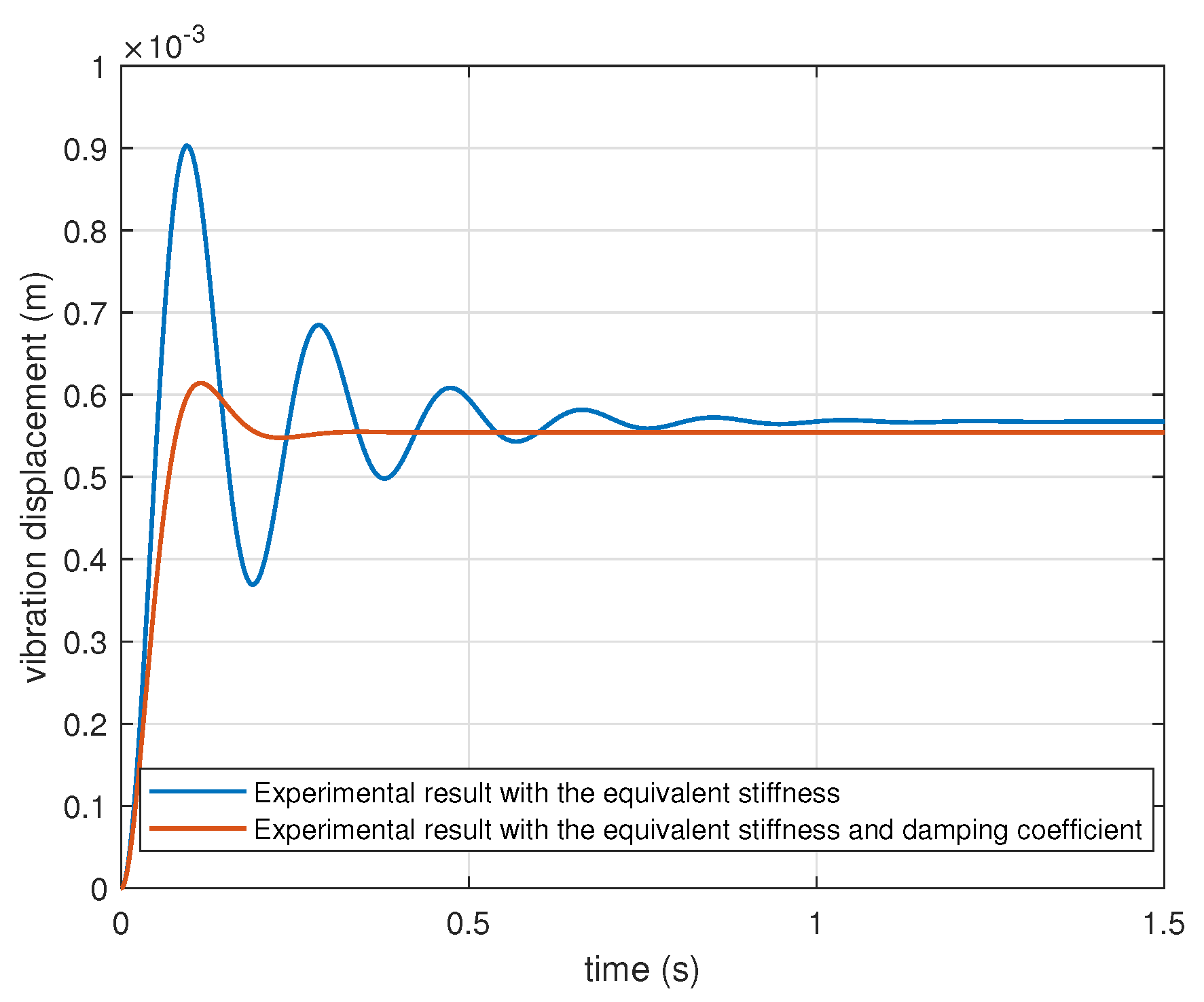
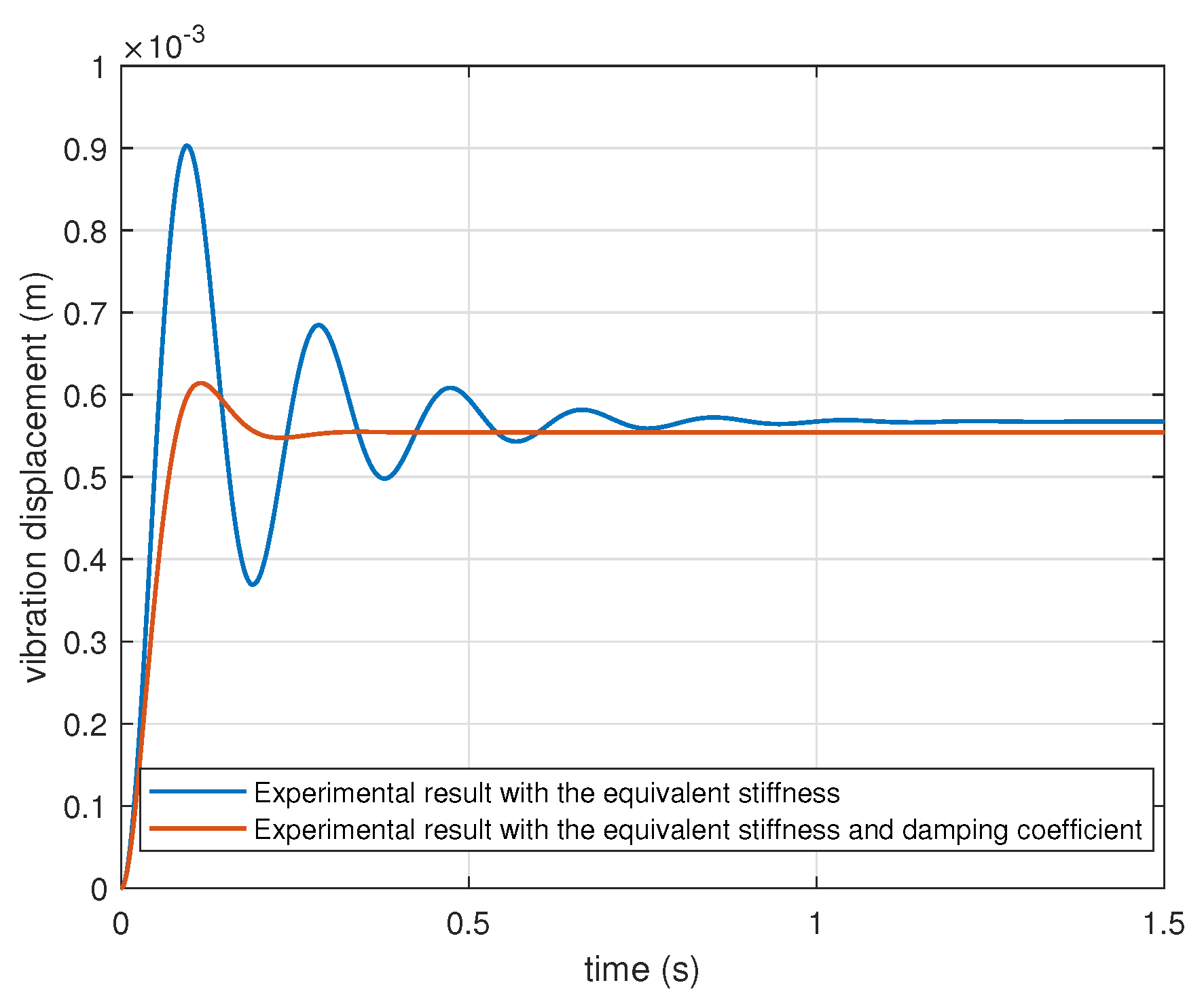
5.2. Experimental Results
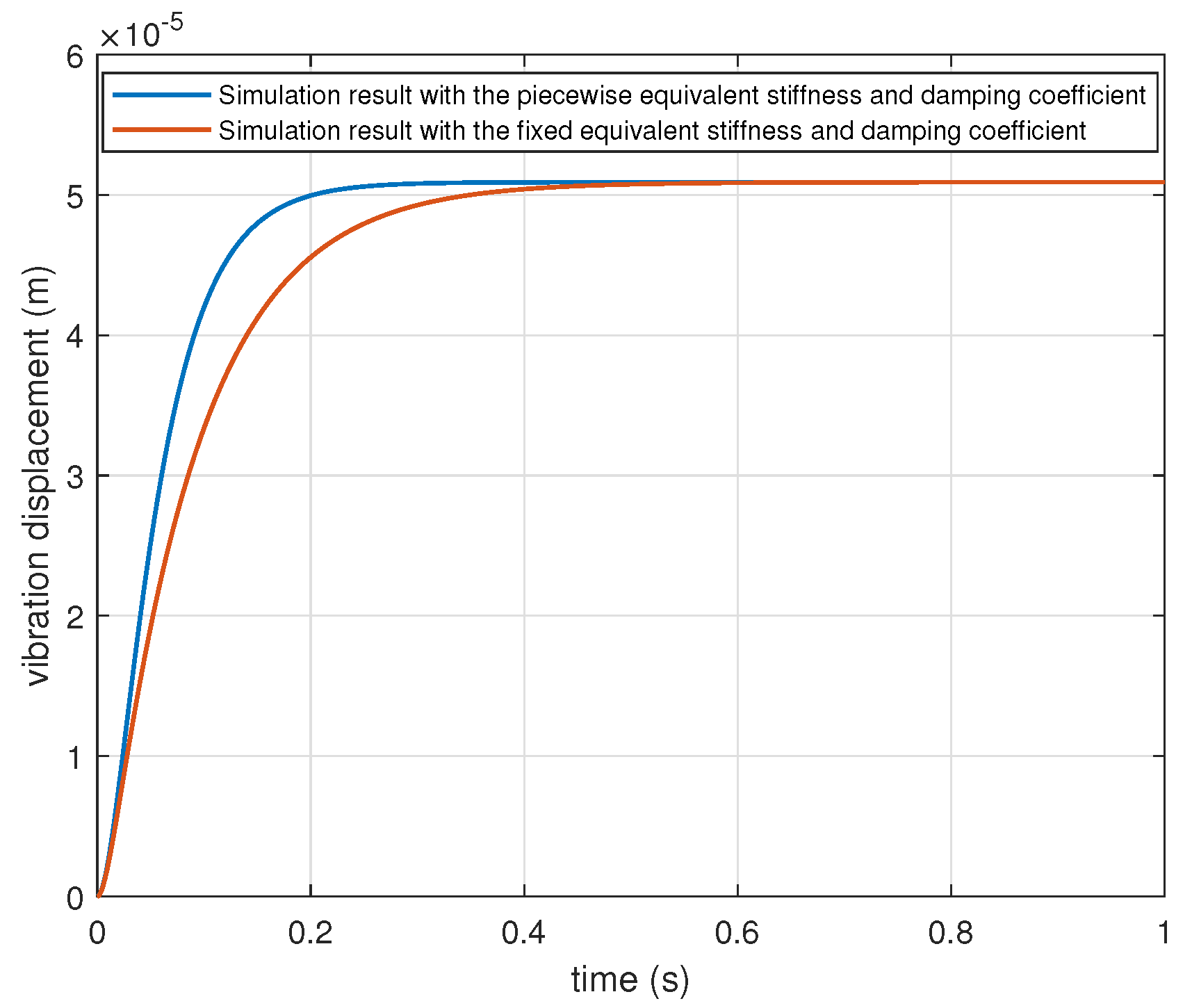
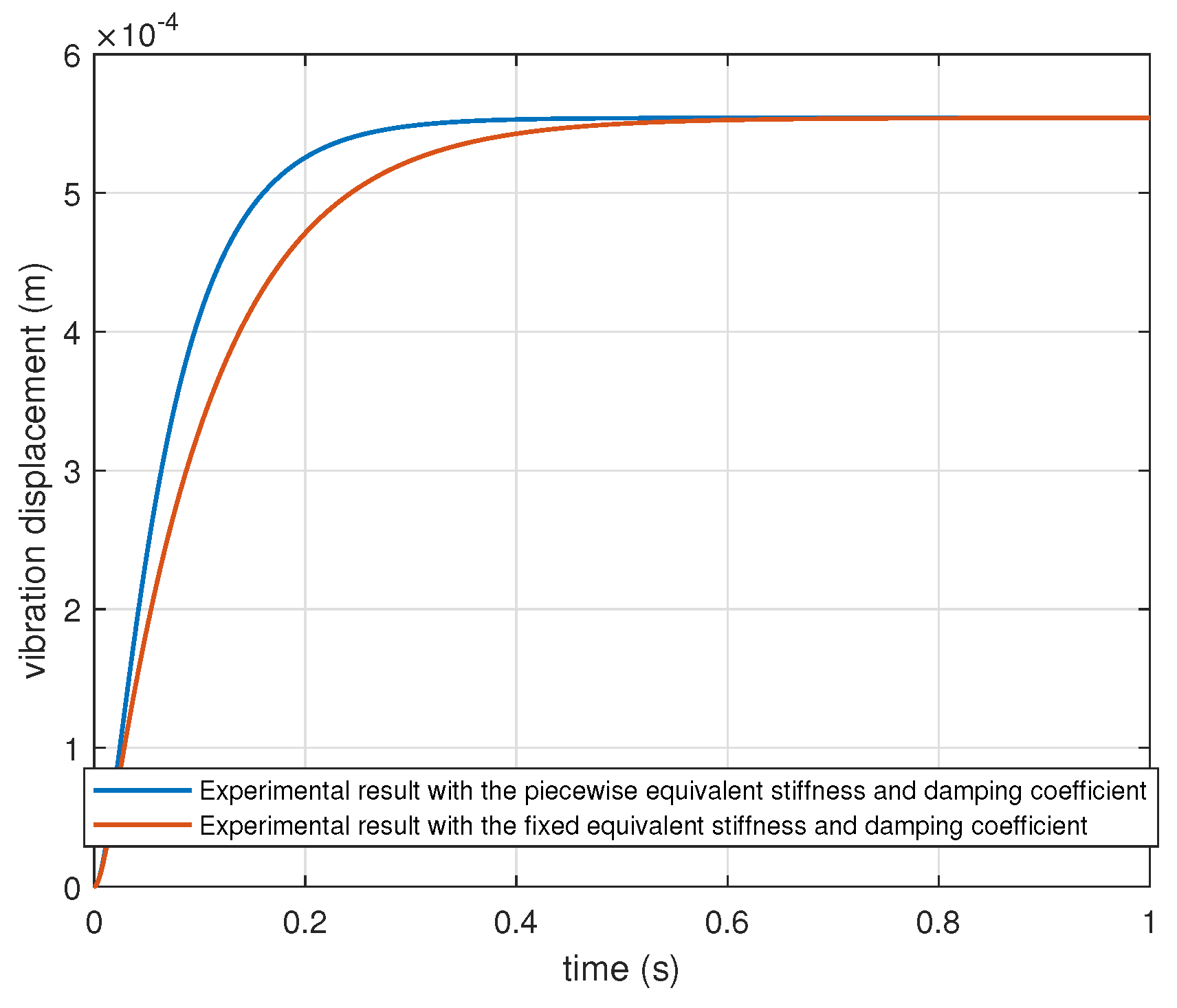
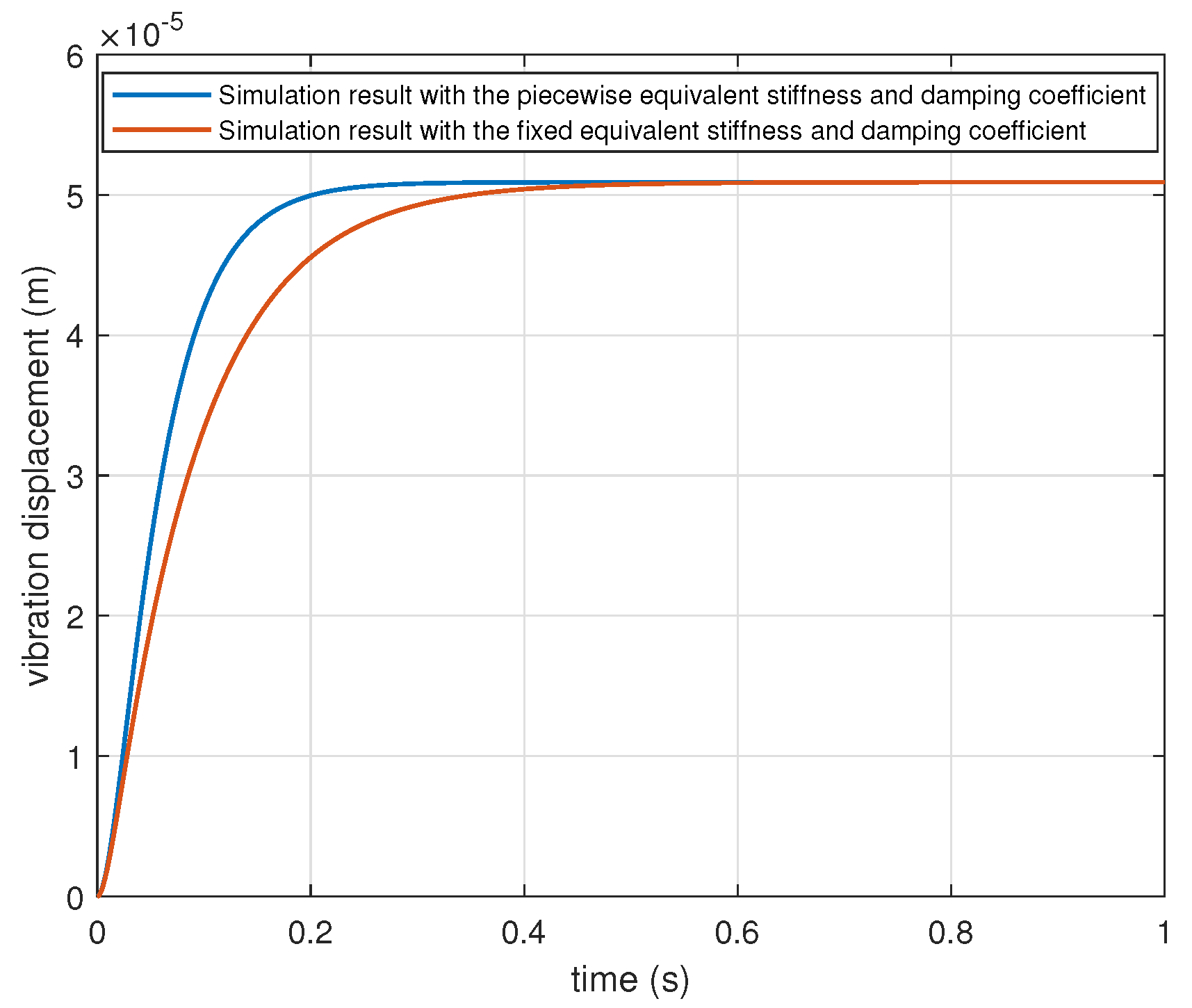
5.3. Active Control Method with the Piecewise Strategy
- (1)
- N/m, N · s/m, when m;
- (2)
- N/m, N · s/m, when m.
- (1)
- N/m, N · s/m, when m;
- (2)
- N/m, N · s/m, when m.
6. Conclusions
- (1)
- Due to the two electromagnets with the electromagnetic force could be simplified as a spring or a spring and a damper, the equivalent stiffness coefficient and damping coefficient of the electromagnetic isolation system are calculated by the required range of dynamic performance indexes, which can avoid the parameter tuning problem of a PID controller. According to the established nonlinear relationship, the equivalent stiffness and the equivalent damping coefficient can be satisfied by controlling the coil currents. Based on the model of the system and the proposed active control method, the control diagrams are established for simulations and experiments.
- (2)
- The simulation and experimental results verify that the active control approach with the equivalent stiffness and damping coefficient can obtain the desired dynamic performance indexes and control vibration amplitudes for keeping stability of the isolation system.
- (3)
- In order to realize the variable control parameters of the electromagnetic vibration isolation system and eliminate overshoot and oscillations, an active control method based on the equivalent stiffness and damping coefficient with the piecewise strategy is proposed. The simulation and experimental results show that the control method based on the piecewise equivalent stiffness and damping coefficient can not only reduce the setting time of the system, but also ensure the stability of the system. The conclusion is useful for vibration control in the active electromagnetic isolation system in practical engineering.
Author Contributions
Funding
Conflicts of Interest
References
- Daley, S.; Johnson, F.A.; Pearson, J.B.; Dixon, R. Active vibration control for marine applications. Control Eng. Pract. 2004, 12, 465–474. [Google Scholar]
- Robertson, W.; Kinder, M.R.F.; Cazzolato, B.; Zander, A. Theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration isolation. J. Sound Vib. 2009, 326, 88–103. [Google Scholar]
- Wang, R.C.; Ding, R.K.; Chen, L. Application of hybrid electromagnetic suspension in vibration energy regeneration and active control. J. Vib. Control 2018, 24, 223–233. [Google Scholar]
- Zheng, L.; Huang, B.; Zhang, Q.; Lu, X.L. Experimental and analytical study on vibration control effects of eddy-current tuned mass dampers under seismic excitations. J. Sound Vib. 2018, 24, 153–165. [Google Scholar]
- Hoque, M.E.; Takasaki, M.; Ishino, Y.; Suzuki, H.H.; Mizuno, T. An active micro vibration isolation with zero-power controlled magnetic suspension technology. JSME Int. J. Ser. Mech. Syst. Mach. Elem. Manuf. 2006, 49, 719–726. [Google Scholar]
- Chen, J.D.; Lu, G.T.; Li, Y.R.; Wang, T.; Wang, W.X.; Song, G.B. Experimental study on robustness of an eddy current-tuned mass damper. Appl. Sci. 2017, 7, 895. [Google Scholar]
- Yip, W.S.; To, S. Tool life enhancement in dry diamond turning of titanium alloys using an eddy current damping and a magnetic field for sustainable manufacturing. J. Clean. Prod. 2017, 168, 929–939. [Google Scholar]
- Amjadian, M.; Agrawal, A.K. A passive electromagnetic eddy current friction damper (PEMECFD): Theoretical and analytical modeling. Struct. Control Health Monit. 2017, 24, 1978. [Google Scholar]
- Setareh, M.; Hanson, R.D. Tuned mass dampers to control floor vibration from humans. J. Struct. Eng. 1992, 118, 741–762. [Google Scholar]
- Antoniadis, I.A.; Kanarachos, S.A.; Gryllias, K.; Sapountzakis, I.E. KDamping: A stiffness based vibration absorption concept. J. Vib. Control 2018, 24, 588–606. [Google Scholar]
- Ahn, H.J.; Hwang, K.; Nguyen, D.C. Eddy current damper for passive reaction force compensation of a linear motor motion stage. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2017, 231, 360–366. [Google Scholar]
- Bae, J.S.; Hwang, J.H.; Roh, J.H.; Kim, J.H.; Yi, M.S.; Lim, J.H. Vibration suppression of a cantilever beam using magnetically tuned-mass-damper. J. Sound Vib. 2012, 331, 5669–5684. [Google Scholar]
- Kim, H.T.; Lee, K.W.; Kim, C.H.; Lee, G.S. An electro-magneto-pneumatic spring for vibration control in semiconductor manufacturing. In Proceedings of the IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Zhou, N.; Liu, K. A tunable high-static-low-dynamic stiffness vibration isolation. J. Sound Vib. 2010, 329, 1254–1273. [Google Scholar]
- Ahn, K.G.; Pahk, H.J.; Jung, M.Y.; Cho, D.W. A hybrid-type active vibration isolation system using neural networks. J. Sound Vib. 1996, 4, 793–805. [Google Scholar]
- Sun, T.; Huang, Z.; Chen, D. Signal frequency-based semi-active fuzzy control for two-stage vibration isolation system. J. Sound Vib. 2005, 280, 965–981. [Google Scholar]
- Bai, M.R.; Liu, W. Control design of active vibration isolation using μ-synthesis. J. Sound Vib. 2002, 257, 157–175. [Google Scholar]
- Shaw, J. Active vibration isolation by adaptive control. J. Vib. Control 2011, 7, 19–31. [Google Scholar]
- Mehendale, C.S.; Fialho, I.J.; Grigoriadis, K.M. A linear parameter-varying framework for adaptive active microgravity isolation. J. Vib. Control 2009, 15, 773–800. [Google Scholar]
- Chen, K.T.; Chou, C.H.; Chang, S.H.; Liu, Y.H. Intelligent active vibration control in an isolation platform. Appl. Acoust. 2007, 69, 1063–1084. [Google Scholar]
- Xie, Z.; Shepard, W.S.; Woodbury, K.A. Design optimization for vibration reduction of viscoelastic damped structures using genetic algorithms. Shock Vib. 2009, 16, 455–466. [Google Scholar]
- Zhang, Y.; Xu, S.J. Vibration isolation platform for control moment gyroscopes on satellites. J. Aerosp. Eng. 2012, 25, 641–652. [Google Scholar] [CrossRef]
- Song, F.Z.; Liu, H.; Song, B.; Feng, H.M. Dynamic optimization of PID control parameters of complex magnetic suspension electromechanical coupling system. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 3435–3440. [Google Scholar]
- Fadil, M.A.; Jalil, N.A.; Darus, I.Z.M. Intelligent PID controller using iterative learning algorithm for active vibration controller of flexible beam. In Proceedings of the 2013 IEEE Symposium on Computers and Informatics, Langkawi, Malaysia, 7–9 April 2013. [Google Scholar]
- Rahman, M.; Ong, Z.C.; Chong, W.T.; Julai, S.; Ng, X.W. Wind turbine tower modeling and vibration control under different types of loads using ant colony optimized PID controller. Arab. J. Sci. Eng. 2019, 44, 707–720. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X.T. An experimental study of an electromagnetic isolator system with active control. Int. J. Appl. Electromagn. Mech. 2019, 61, 329–340. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhuan, X. Active Control Method Based on Equivalent Stiffness and Damping Coefficient for an Electromagnetic Isolation System. Appl. Sci. 2020, 10, 7953. https://doi.org/10.3390/app10227953
Zhang L, Zhuan X. Active Control Method Based on Equivalent Stiffness and Damping Coefficient for an Electromagnetic Isolation System. Applied Sciences. 2020; 10(22):7953. https://doi.org/10.3390/app10227953
Chicago/Turabian StyleZhang, Lei, and Xiangtao Zhuan. 2020. "Active Control Method Based on Equivalent Stiffness and Damping Coefficient for an Electromagnetic Isolation System" Applied Sciences 10, no. 22: 7953. https://doi.org/10.3390/app10227953
APA StyleZhang, L., & Zhuan, X. (2020). Active Control Method Based on Equivalent Stiffness and Damping Coefficient for an Electromagnetic Isolation System. Applied Sciences, 10(22), 7953. https://doi.org/10.3390/app10227953