Verification of an Accommodative Response for Depth Measurement of Floating Hologram Using a Holographic Optical Element

 ,
, 
Abstract
1. Introduction
2. Background Theory
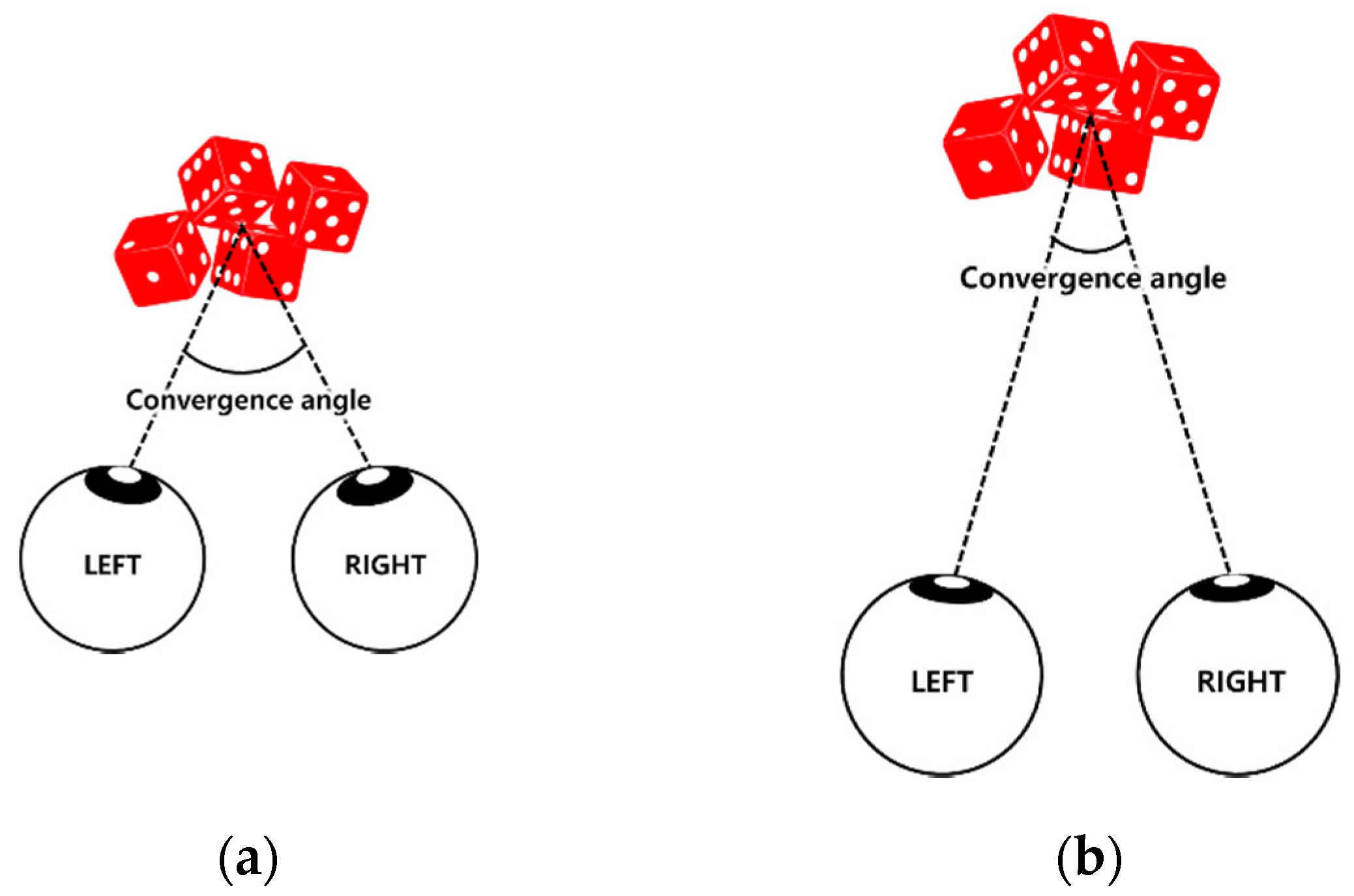
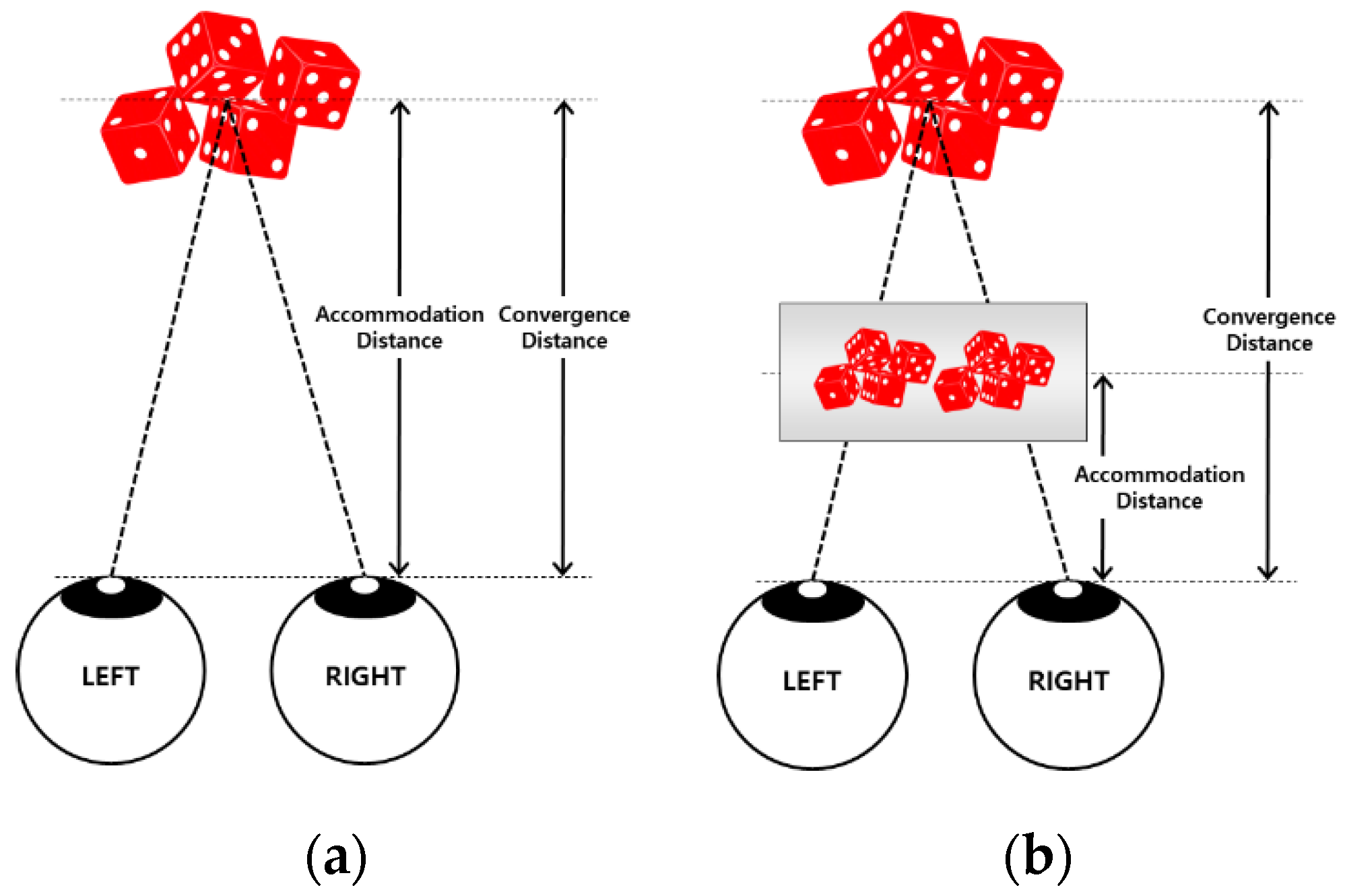
2.1. Convergence Response
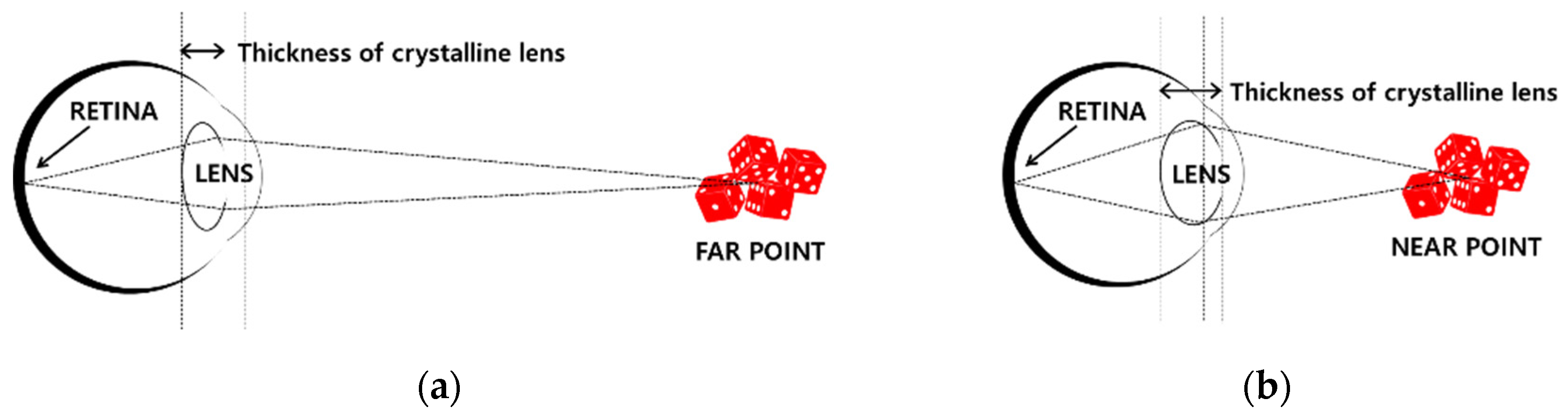
2.2. Accommodation Response
3. Materials and Methods
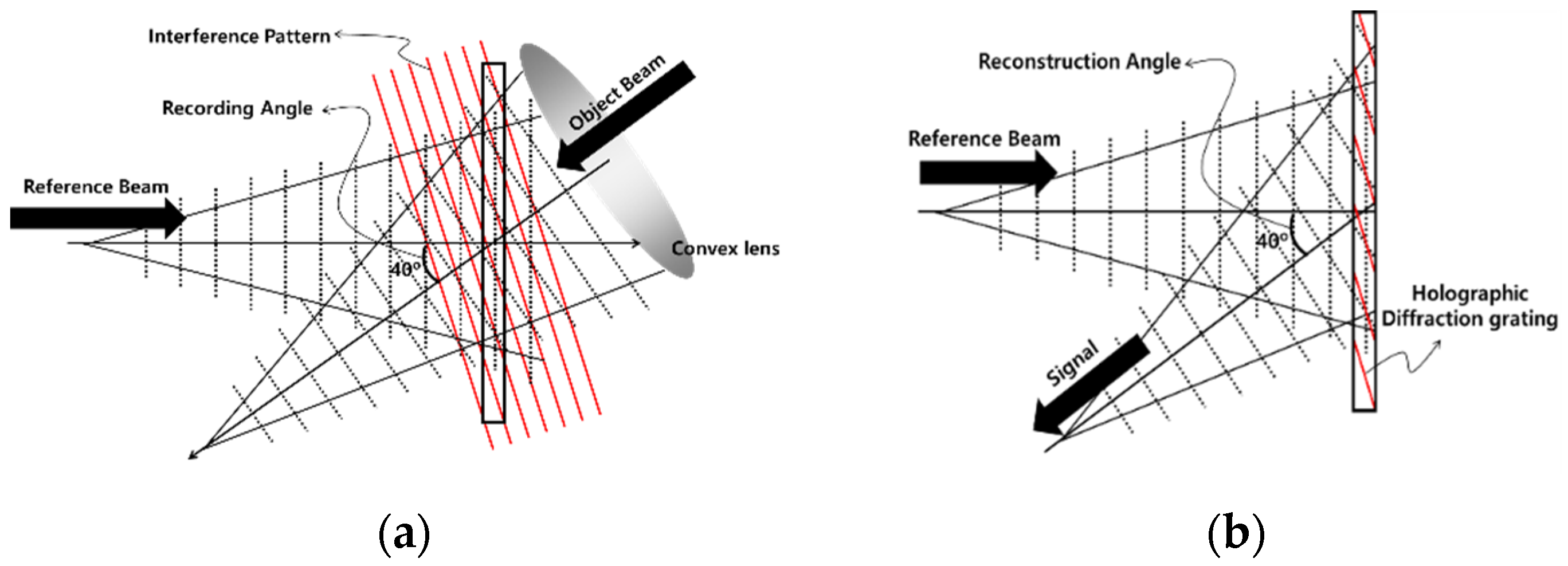
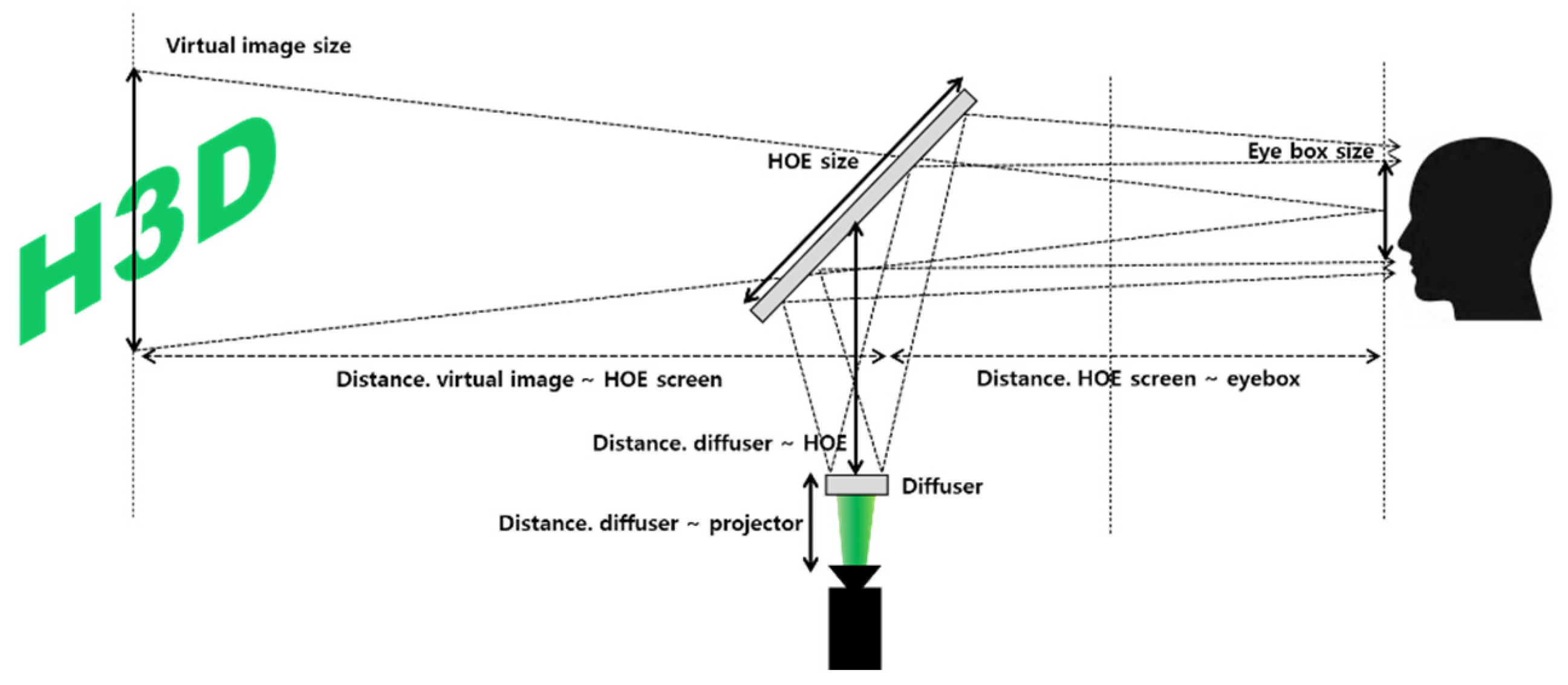
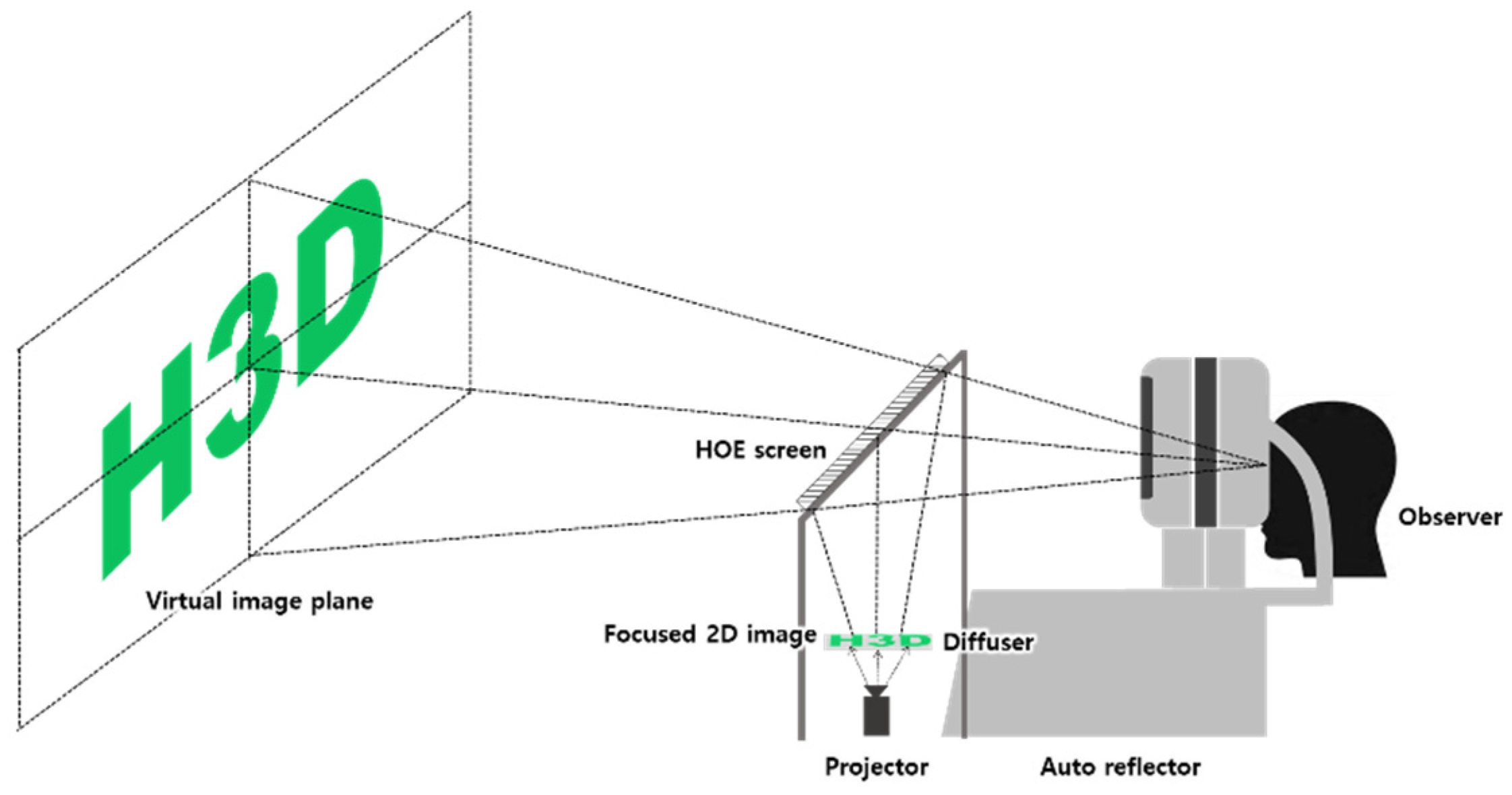
3.1. Design of a Floating Hologram System Using a HOE
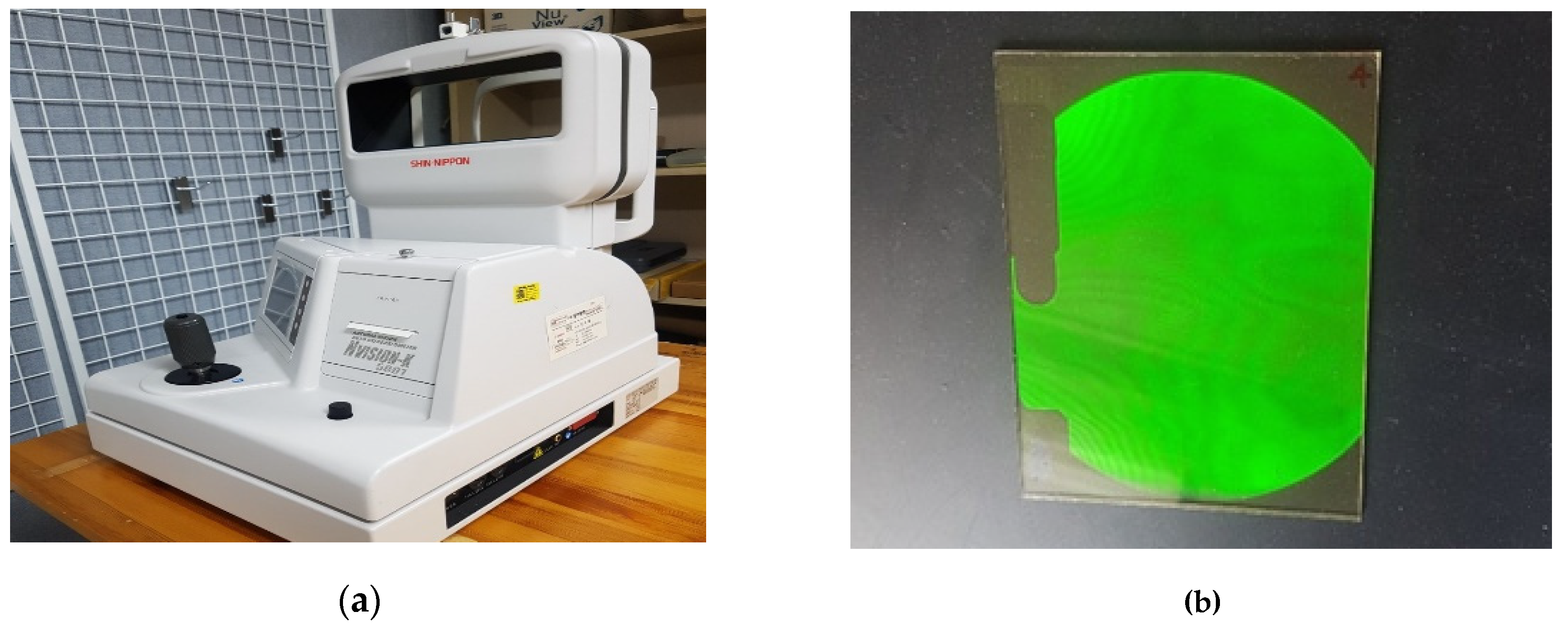
3.2. Materials to Measure the Accommodative Response
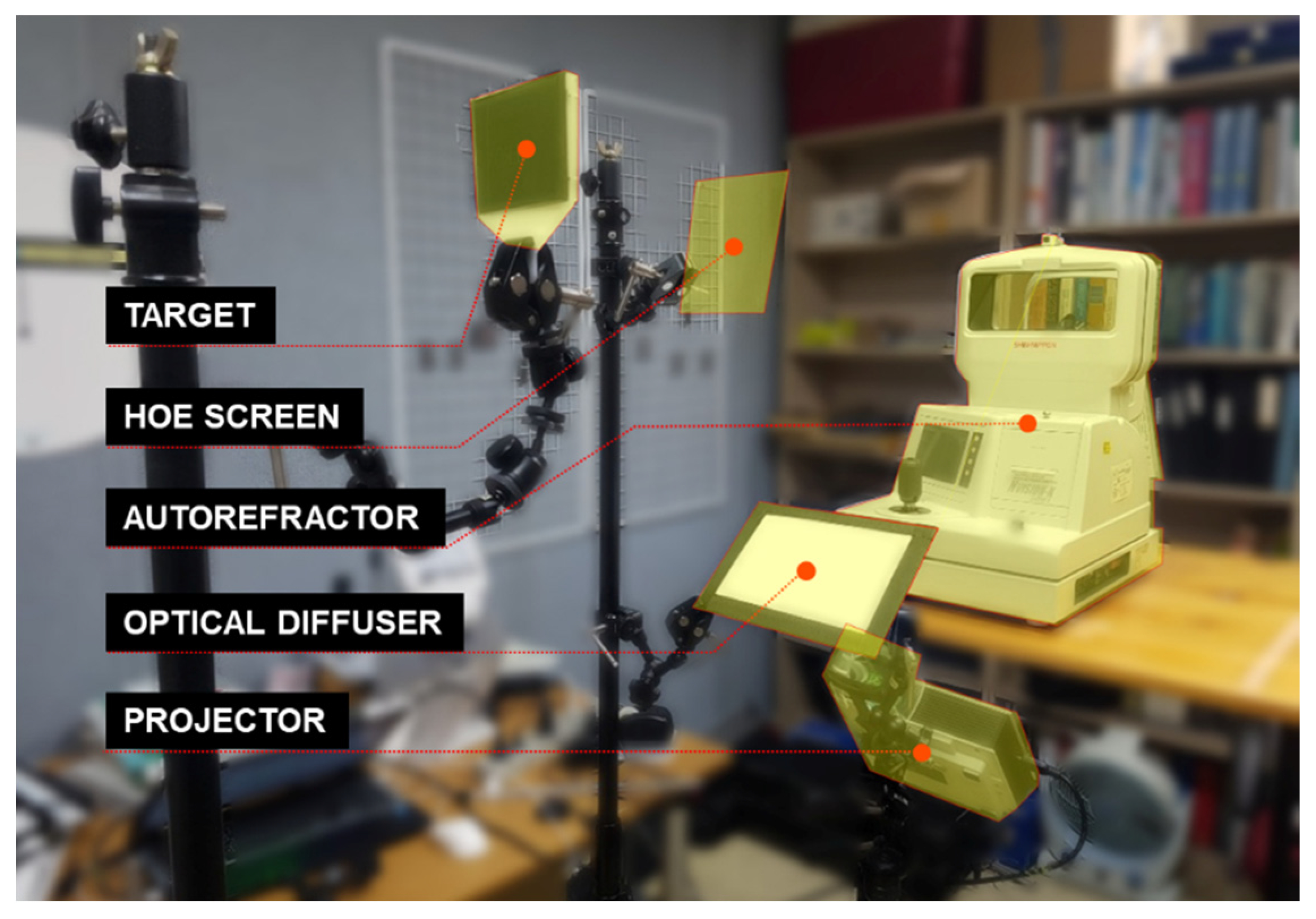
3.3. Experiment Design
4. Results and Discussion
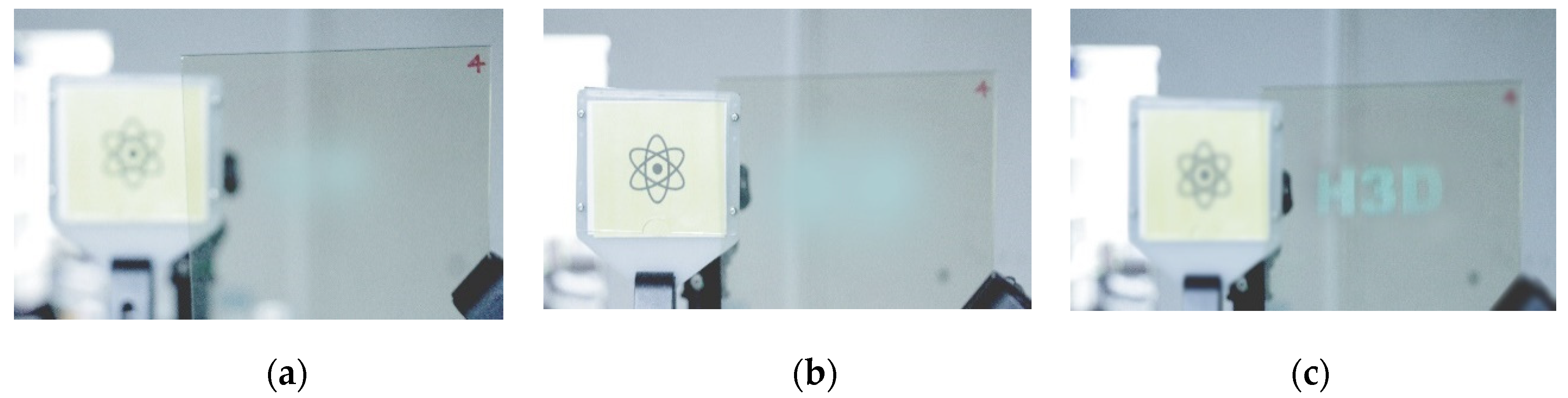
4.1. Measuring the Depth of a Floating 2D Image
4.2. Measurement Results of the Accommodative Responses
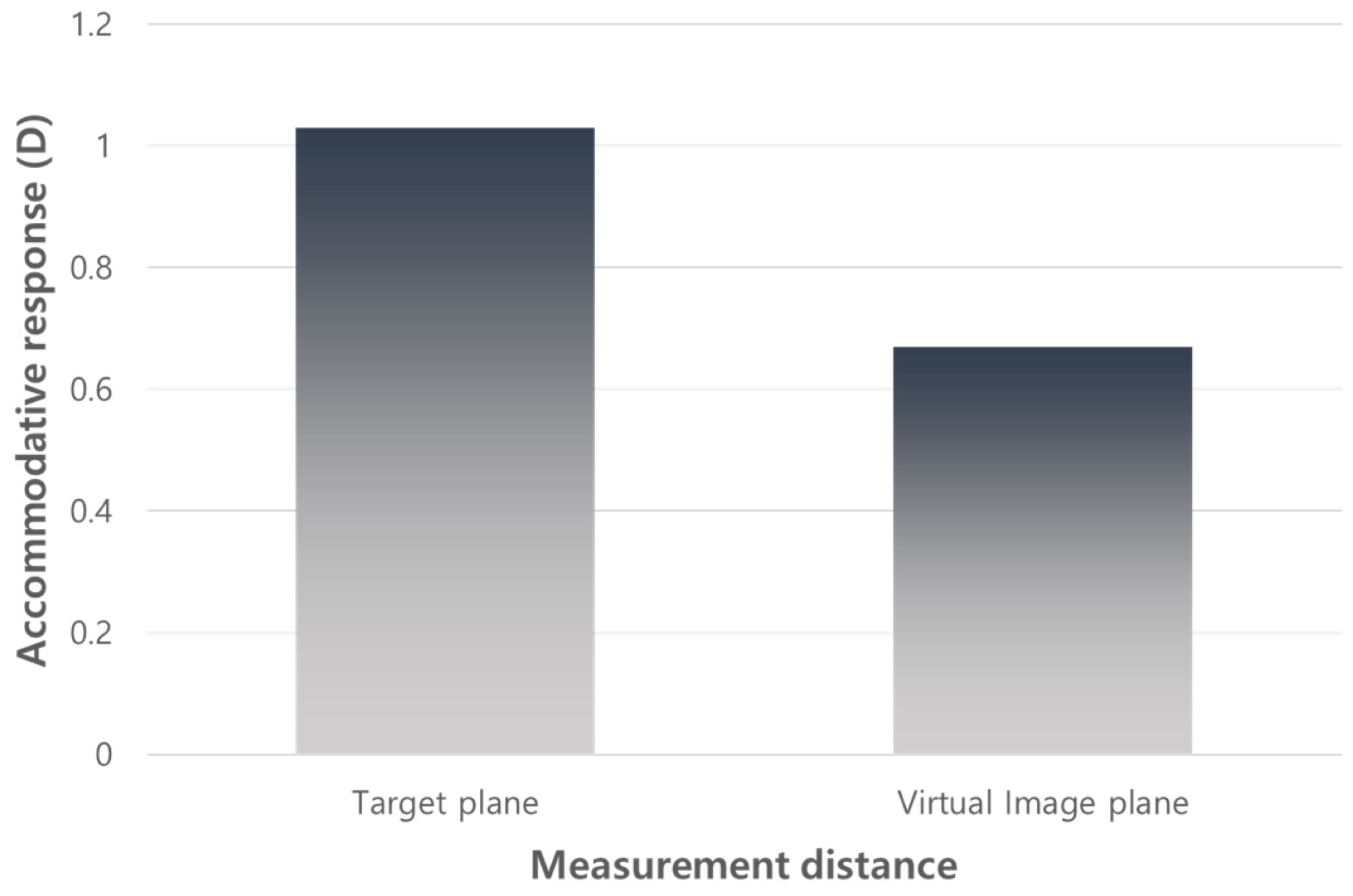
4.2.1. Comparison Results of the Control Reaction between the Target Position of 1.00 D and the Virtual Image Plane
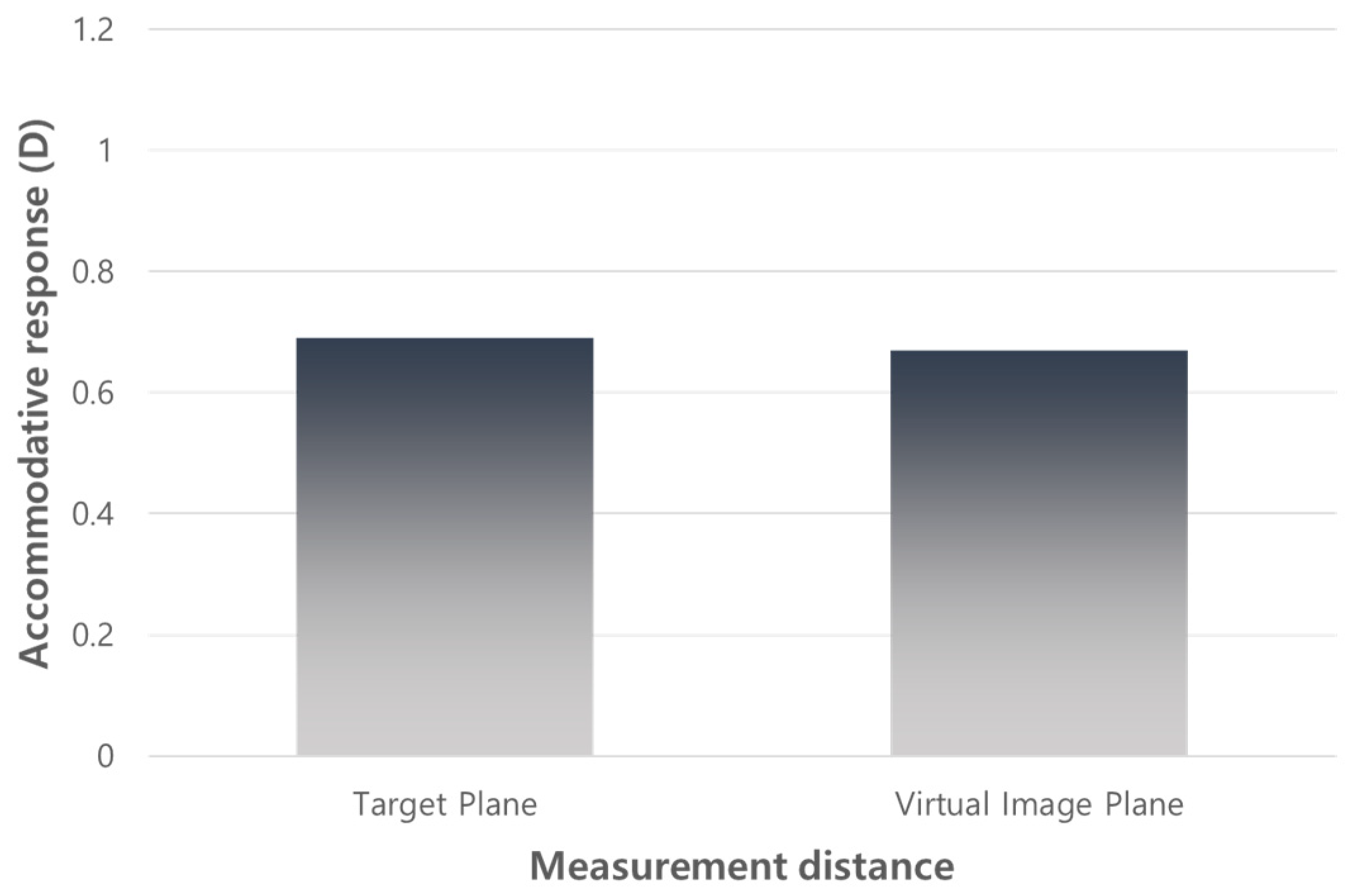
4.2.2. Comparison Results of the Control Reaction between the Target Position of 0.67 D and the Virtual Image Plane
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Thomas, W.; Frey, H.; Jean, P. Virtual HUD using an HMD. Helmet- and Head-Mounted Displays VI. Proc. SPIE Int. Soc. Opt. Eng. 2001, 4361, 251–262. [Google Scholar]
- Choi, P.H.; Choi, Y.H.; Park, M.S.; Lee, S.H. Non-glasses Stereoscopic 3D Floating Hologram System using Polarization Technique. Inst. Internet Broadcasting Commun. 2019, 8, 18–23. [Google Scholar]
- Toshiaki, Y.; Nahomi, M.; Kazuhisa, Y. Holographic Pyramid Using Integral Photography. In Proceedings of the 2nd World Congress on Electrical Engineering and Computer Systems and Science, Budapest, Hungary, 16–17 August 2016; MHCI 109. pp. 16–17. [Google Scholar]
- Reichelt, S.; Haussler, R.; Fütterer, G.; Leister, N. Depth cues in human visual perception and their realization in 3D displays. SPIE Proc. 2010, 7690, 111–112. [Google Scholar]
- De Silva, V.; Fernando, A.; Worrall, S.; Arachchi, H.K.; Kondoz, A. Sensitivity analysis of the human visual system for depth cues in stereoscopic 3-D displays. IEEE Trans. Multimed. 2011, 13, 498–506. [Google Scholar] [CrossRef]
- Owens, D.A.; Mohindra, I.; Held, R. The Effectiveness of a Retinoscope Beam as an Accommodative Stimulus. Investig. Ophthalmol. Vis. Sci. 1980, 19, 942–949. [Google Scholar]
- Avudainayagam, K.V.; Avudainayagam, C.S. Holographic multivergence target for subjective measurement of the astigmatic error of the human eye. Opt. Lett. 2007, 32, 1926–1928. [Google Scholar] [CrossRef] [PubMed]
- Ciuffreda, K.J.; Kruger, P.B. Dynamics of human voluntary accommodation. Am. J. Optom. Physiol. 1988, 65, 365–370. [Google Scholar] [CrossRef] [PubMed]
- Cacho, P.; Garcia, A.; Lara, F.; Segui, M.M. Binocular acommodative facilty testing reliabilty. Optom. Vis. 1992, 4, 314–319. [Google Scholar]
- Bharadwaj, S.R.; Candy, T.R. Acommodative and vergence responses to conflicting blur and disparity stimuli during development. J. Vis. 2009, 9, 1–18. [Google Scholar] [CrossRef]
- Iribarren, R.; Fornaciari, A.; Hung, G.K. Effect of cumulative near work on accommodative facility and asthenopia. Int. Ophthalmol. 2001, 24, 205–212. [Google Scholar] [CrossRef]
- Rosenfield, M.; Ciufreda, K.J. Effect of surround propinquity on the open-loop accommodative response. Investig. Ophthalmol. Vis. Sci. 1991, 32, 142–147. [Google Scholar]
- Rosenfield, M.; Ciufreda, K.J.; Hung, G.K.; Gilmartin, B. Tonic accommodation: A review. I. Basic aspects. Ophthalmic Physiol. Opt. 1993, 13, 266–284. [Google Scholar] [CrossRef] [PubMed]
- McBrien, N.A.; Millodot, M. The relationship between tonic accommodation and refractive error. Investig. Ophthalmol. Vis. Sci. 1987, 28, 997–1004. [Google Scholar]
- Krumholz, D.M.; Fox, R.S.; Ciuffreda, K.J. Short-term changes in tonic accommodation. Investig. Ophthalmol. Vis. Sci. 1986, 27, 552–557. [Google Scholar]
- Nadezhda, V.; Pavel, S. Application of Photopolymer Materials in Holographic Technologies. Polymers 2019, 11, 2020. [Google Scholar]
- Zhang, H.; Deng, H.; He, M.; Li, D.; Wang, Q. Dual-View Integral Imaging 3D Display Based on Multiplexed Lens-Array Holographic Optical Element. Appl. Sci. 2019, 9, 3852. [Google Scholar] [CrossRef]
- Maria, A.F.; Valerio, S.; Giuseppe, C. Volume Holographic Optical Elements as Solar Concentrators: An Overview. Appl. Sci. 2019, 9, 193. [Google Scholar]
- Liu, J.P.; Tahara, T.; Hayasaki, Y.; Poon, T.C. Incoherent Digital Holography: A Review. Appl. Sci. 2018, 8, 143. [Google Scholar] [CrossRef]
- Reid, V.; Adam, R.; Elvis, C.S.C.; Terry, M.P. Hologram stability evaluation for Microsoft HoloLens. Int. Soc. Opt. Photonics. 2017, 10136, 1013614. [Google Scholar]
- Oh, J.Y.; Park, J.H.; Park, J.M. Virtual Object Manipulation by Combining Touch and Head Interactions for Mobile Augmented Reality. Appl. Sci. 2019, 9, 2933. [Google Scholar] [CrossRef]
- Takeda, T.; Hashimoto, K.; Hiruma, N.; Fukui, Y. Characteristics of accommodation toward aparent depth. Vis. Res. 1999, 39, 2087–2097. [Google Scholar] [CrossRef]
- Davies, L.N.; Mallen, E.A.; Wolffsohn, J.S.; Gilmartin, B. Clinical evaluation of the Shin-Nippon NVision-K5001/Grand Seiko WR-5100K autorefractor. Optom. Vis. Sci. 2003, 80, 320–324. [Google Scholar] [CrossRef] [PubMed]
- Gentet, P.; Gentet, Y.; Lee, S.H. Ultimate 04 the new reference for ultra-realistic color holography. In Proceedings of the Emerging Trends Innovation in ICT(ICEI), 2017 International Conference on IEEE, Yashada, Pune, 3–5 February 2017; pp. 162–166. [Google Scholar]
- Gentet, P.; Gentet, Y.; Lee, S.H. New LED’s wavelengths improve drastically the quality of illumination of pulsed digital holograms. In Proceedings of the Digital Holography and Three-Dimensional Imaging, JeJu Island, Korea, 29 May–1 June 2017; p. 209. [Google Scholar]
- Lee, J.H.; Hafeez, J.; Kim, K.J.; Lee, S.H.; Kwon, S.C. A Novel Real-Time Match-Moving Method with HoloLens. Appl. Sci. 2019, 9, 2889. [Google Scholar] [CrossRef]
- Moses, L.E. Non-parametric statistics for psychological research. Psychol. Bull. 1952, 49, 122–143. [Google Scholar] [CrossRef] [PubMed]
- Andrew, J.K. Parametric versus non-parametric statistics in the analysis of randomized trials with non-normally distributed data. BMC Med. Res. Methodol. 2005, 5, 35. [Google Scholar]
- Davison, M.L.; Sharma, A.R. Parametric statistics and levels of measurement. Psychol. Bull. 1988, 104, 137–144. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Value |
|---|---|
| Recording material | U08C |
| Focal length of HOE | 500 mm |
| Size of HOE screen | 100 mm × 125 mm |
| Wavelength | 532 mm |
| Resolution | Over 1000 line/mm |
| Diffraction efficiency | 48.50% |
| Distance: Virtual image–HOE screen | 3000 mm |
| Distance: Diffuser–HOE screen | 430 mm |
| Distance: HOE screen–eye box | 500 mm |
| Distance: Projector–diffuser | 300 mm |
| Mean ± SD | MD | t | p-Value | |
|---|---|---|---|---|
| Target | Virtual Image | −0.36 | −8.335 | p < 0.001 |
| (1.03 ± 1.01) | (0.67 ± 1.02) | |||
| Mean ± SD | MD | t | p-Value | |
|---|---|---|---|---|
| Target | Virtual Image | −0.02 | 1.225 | 0.311 |
| (0.69 ± 1.03) | (0.67 ± 1.37) | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, L.; Ha, S.; Gentet, P.; Lee, J.; Kwon, S.; Lee, S. Verification of an Accommodative Response for Depth Measurement of Floating Hologram Using a Holographic Optical Element. Appl. Sci. 2020, 10, 6788. https://doi.org/10.3390/app10196788
Hwang L, Ha S, Gentet P, Lee J, Kwon S, Lee S. Verification of an Accommodative Response for Depth Measurement of Floating Hologram Using a Holographic Optical Element. Applied Sciences. 2020; 10(19):6788. https://doi.org/10.3390/app10196788
Chicago/Turabian StyleHwang, Leehwan, Sungjae Ha, Philippe Gentet, Jaehyun Lee, Soonchul Kwon, and Seunghyun Lee. 2020. "Verification of an Accommodative Response for Depth Measurement of Floating Hologram Using a Holographic Optical Element" Applied Sciences 10, no. 19: 6788. https://doi.org/10.3390/app10196788
APA StyleHwang, L., Ha, S., Gentet, P., Lee, J., Kwon, S., & Lee, S. (2020). Verification of an Accommodative Response for Depth Measurement of Floating Hologram Using a Holographic Optical Element. Applied Sciences, 10(19), 6788. https://doi.org/10.3390/app10196788