A Novel Self-Moving Framed Piezoelectric Actuator




Abstract
1. Introduction
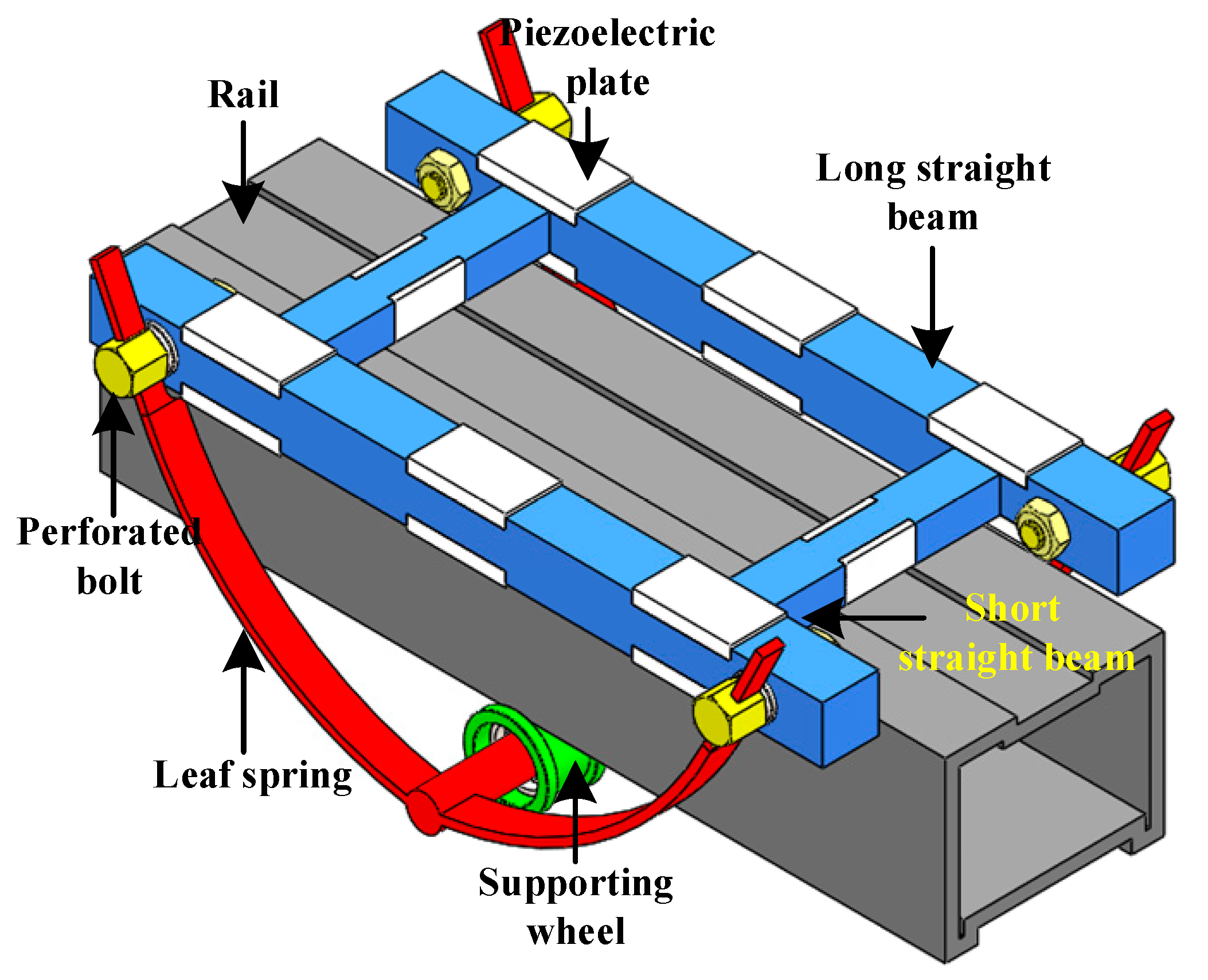
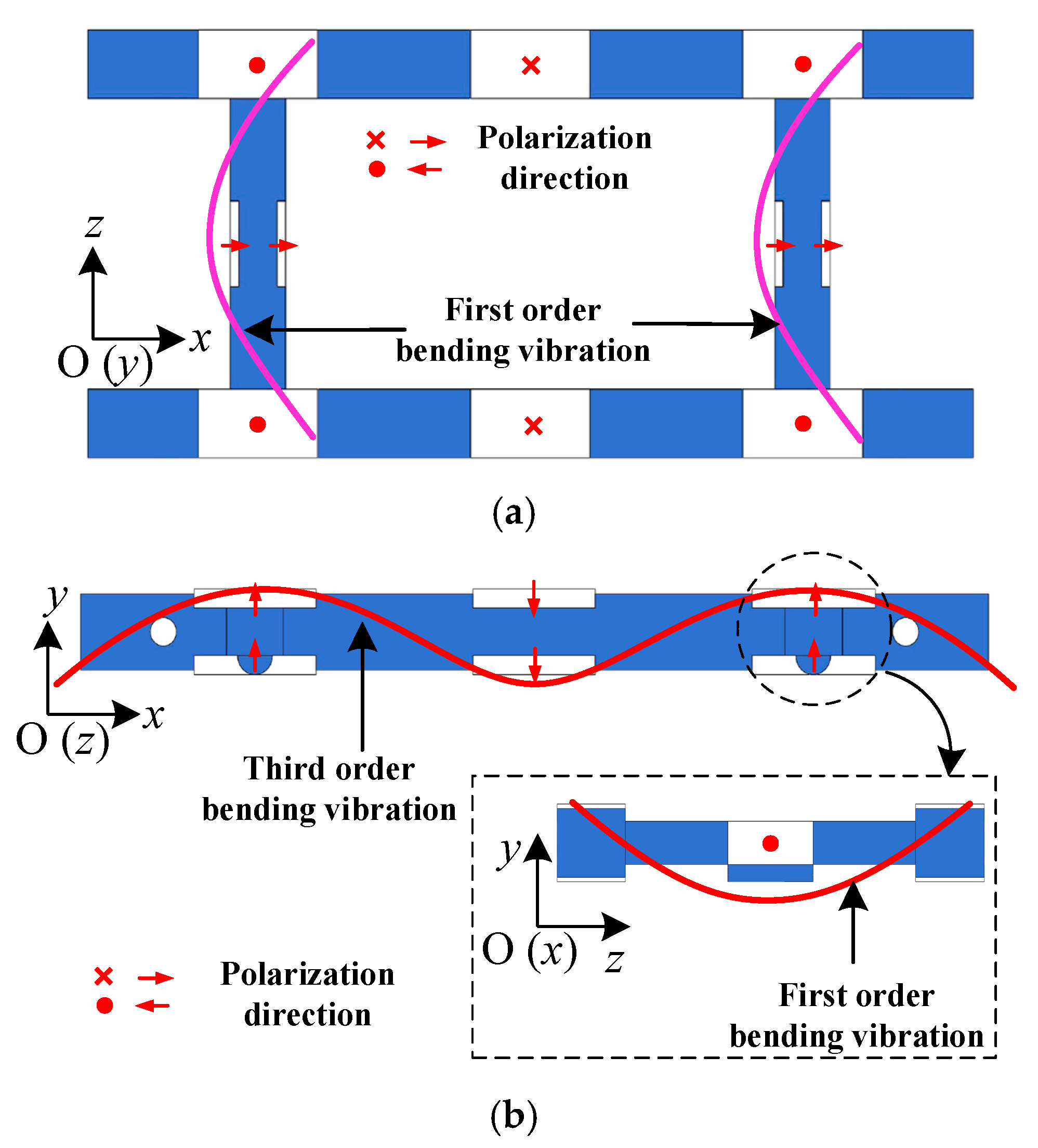
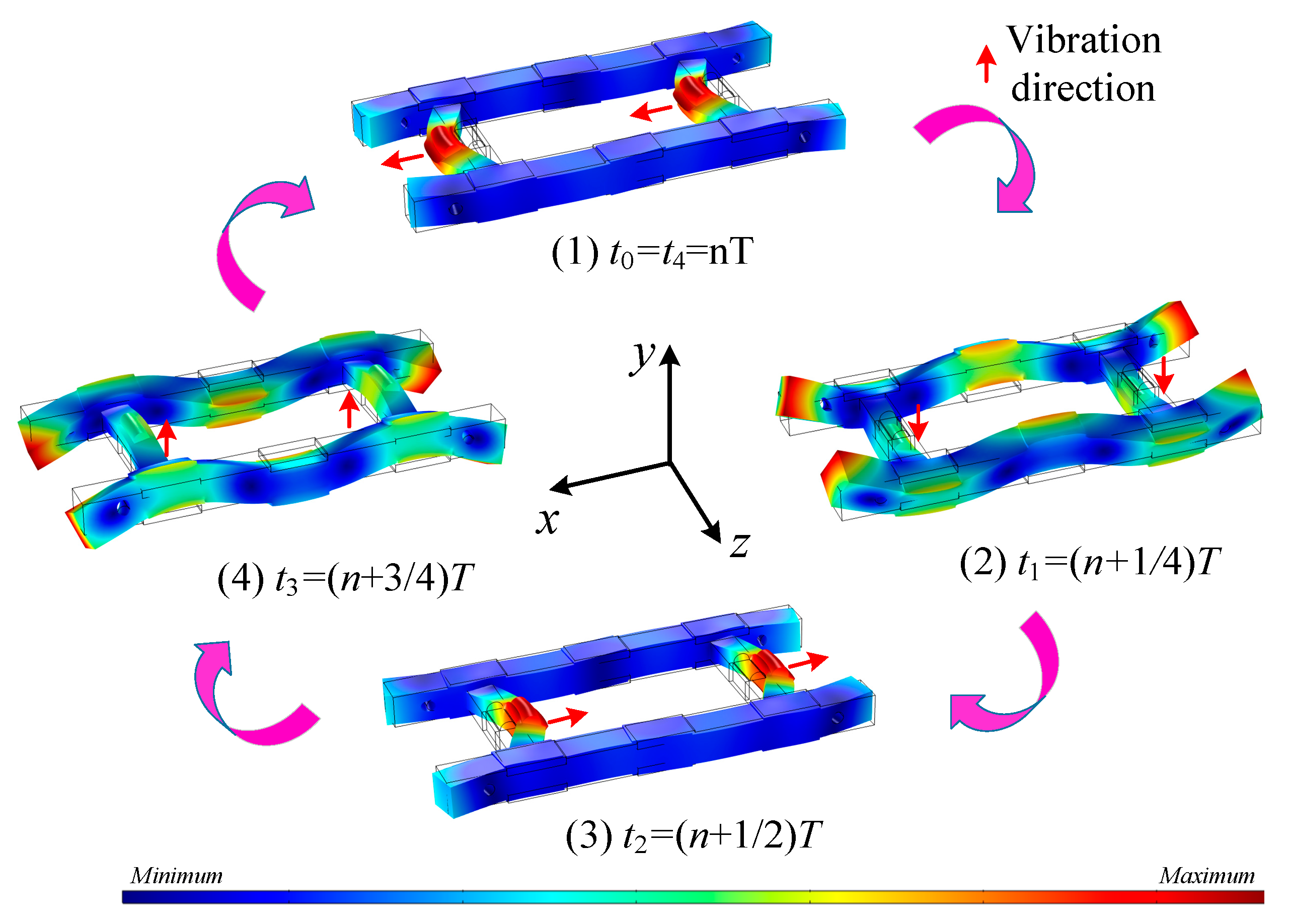
2. Configuration and Operating Principle
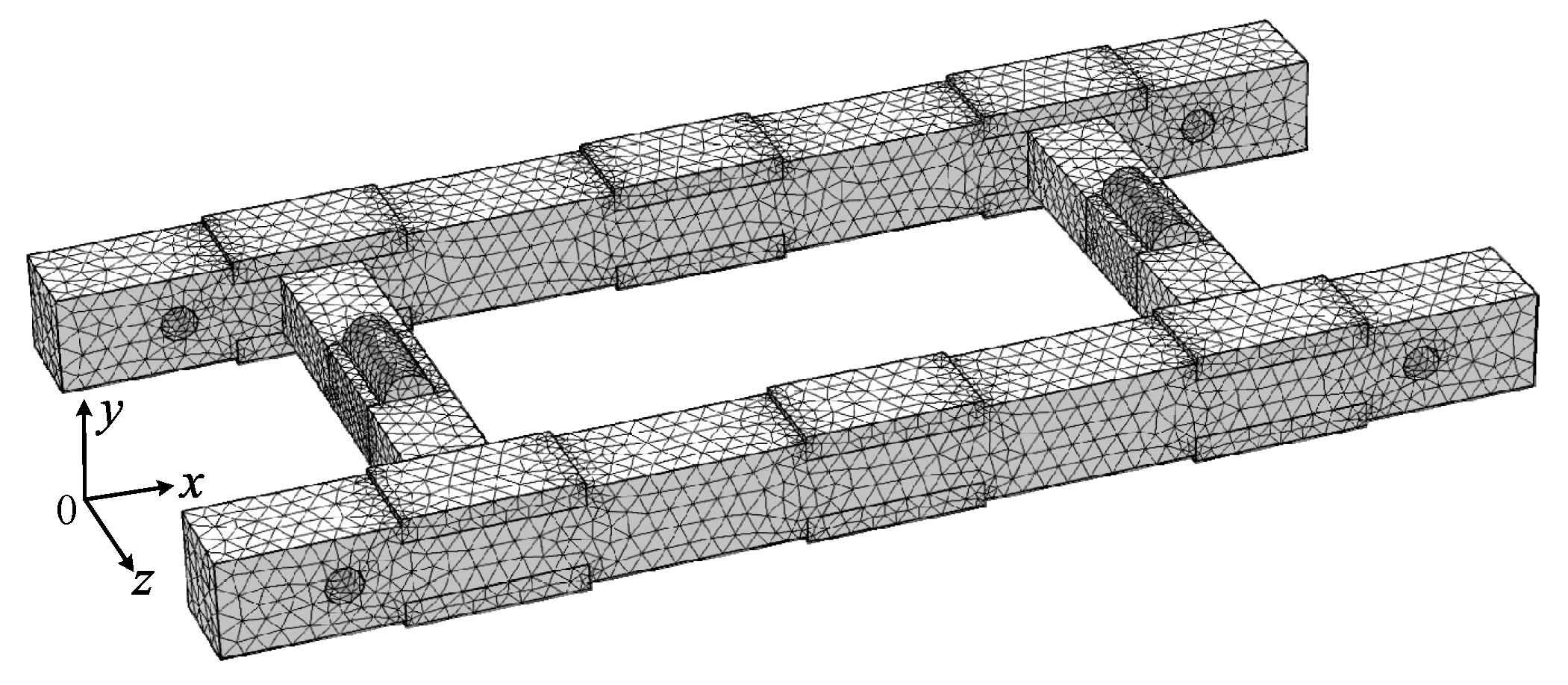
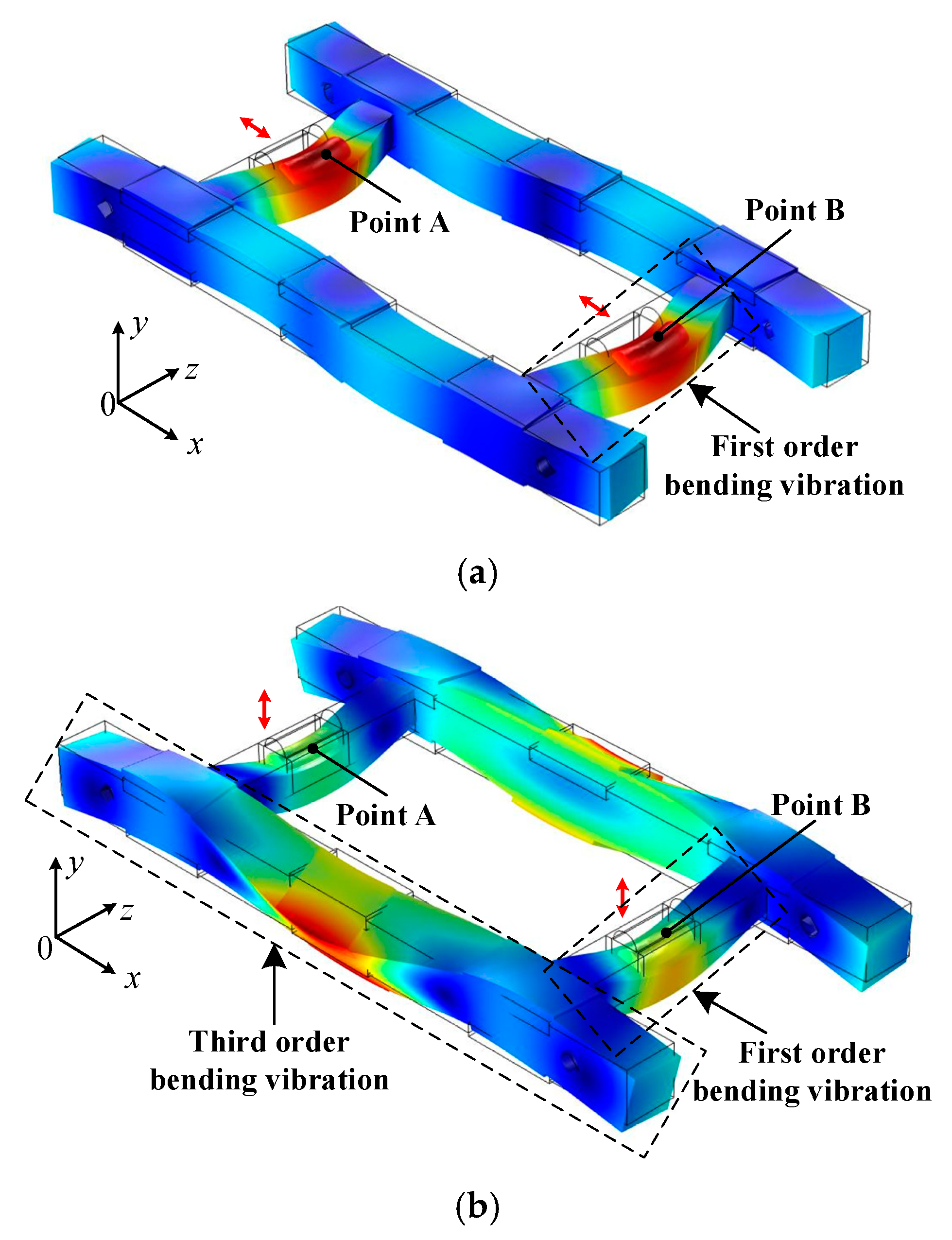
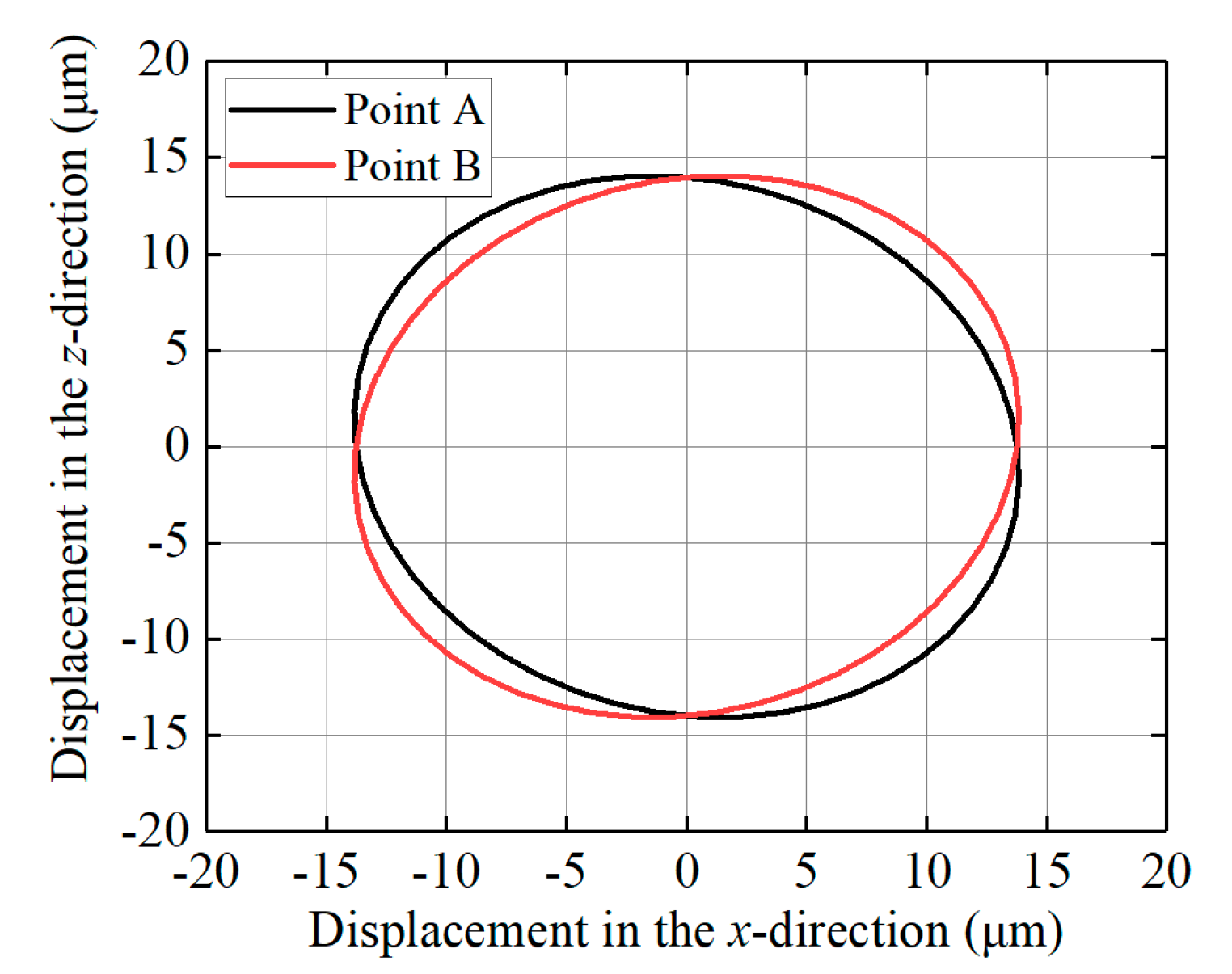
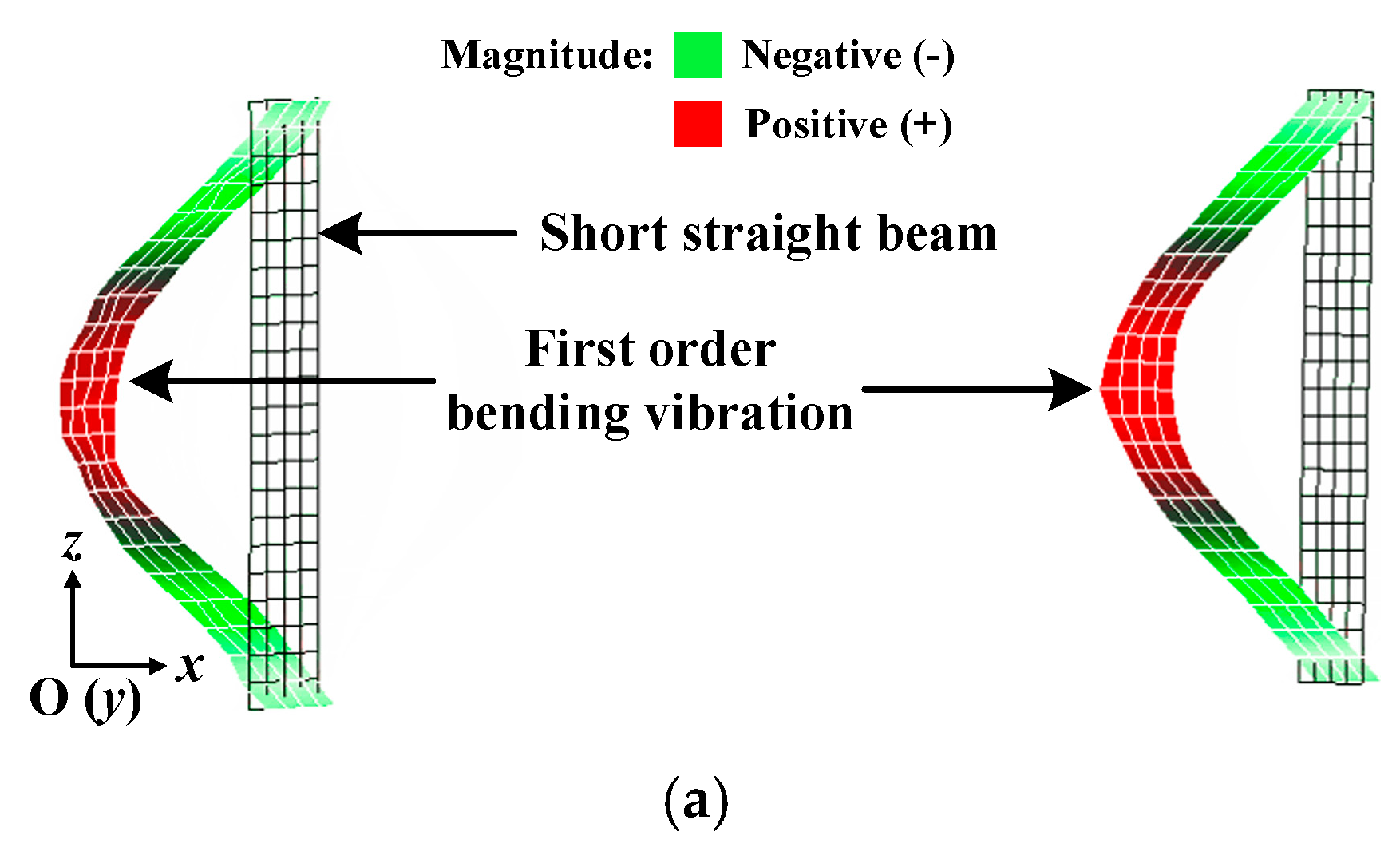
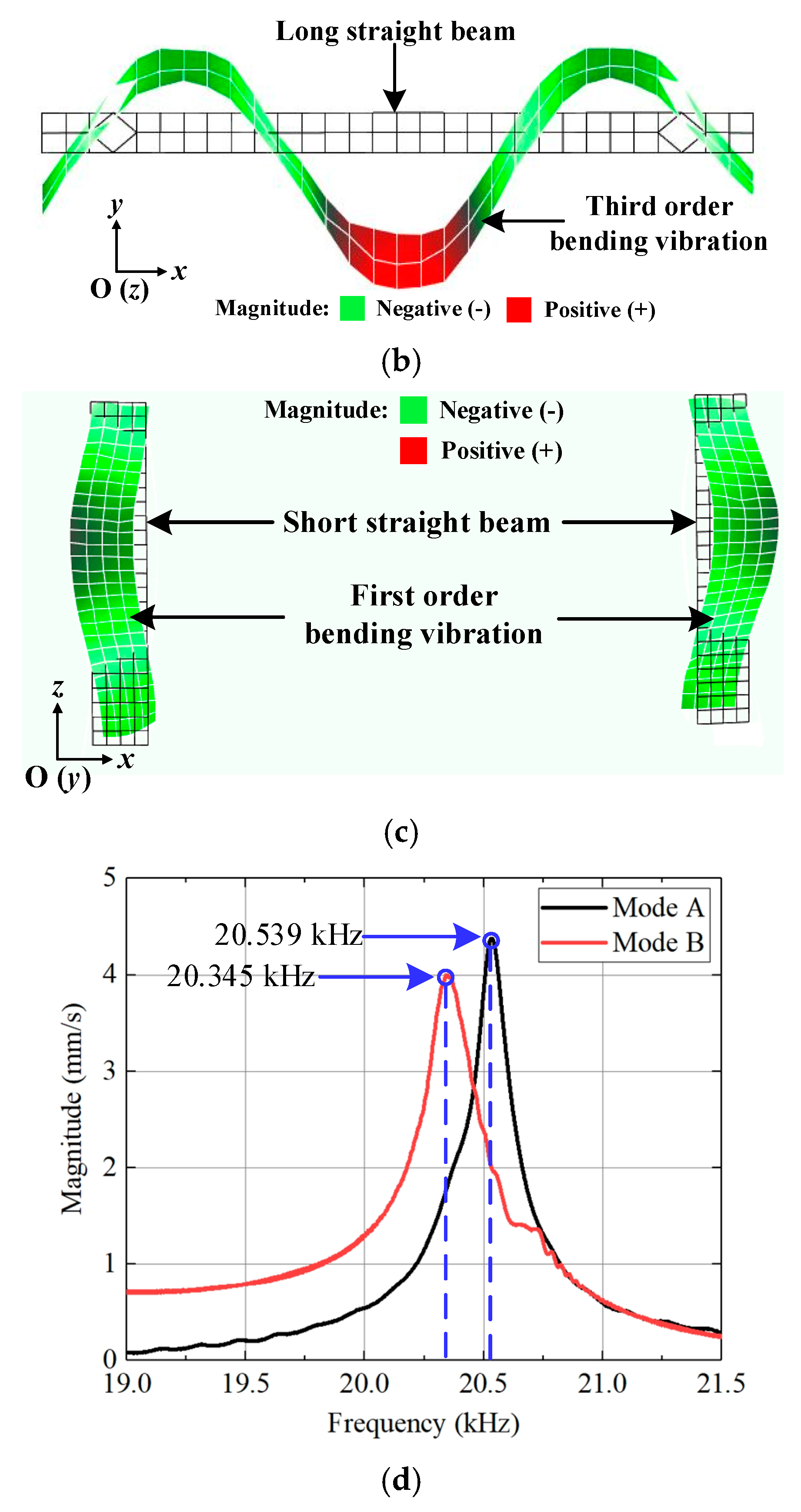
3. Numerical Simulation
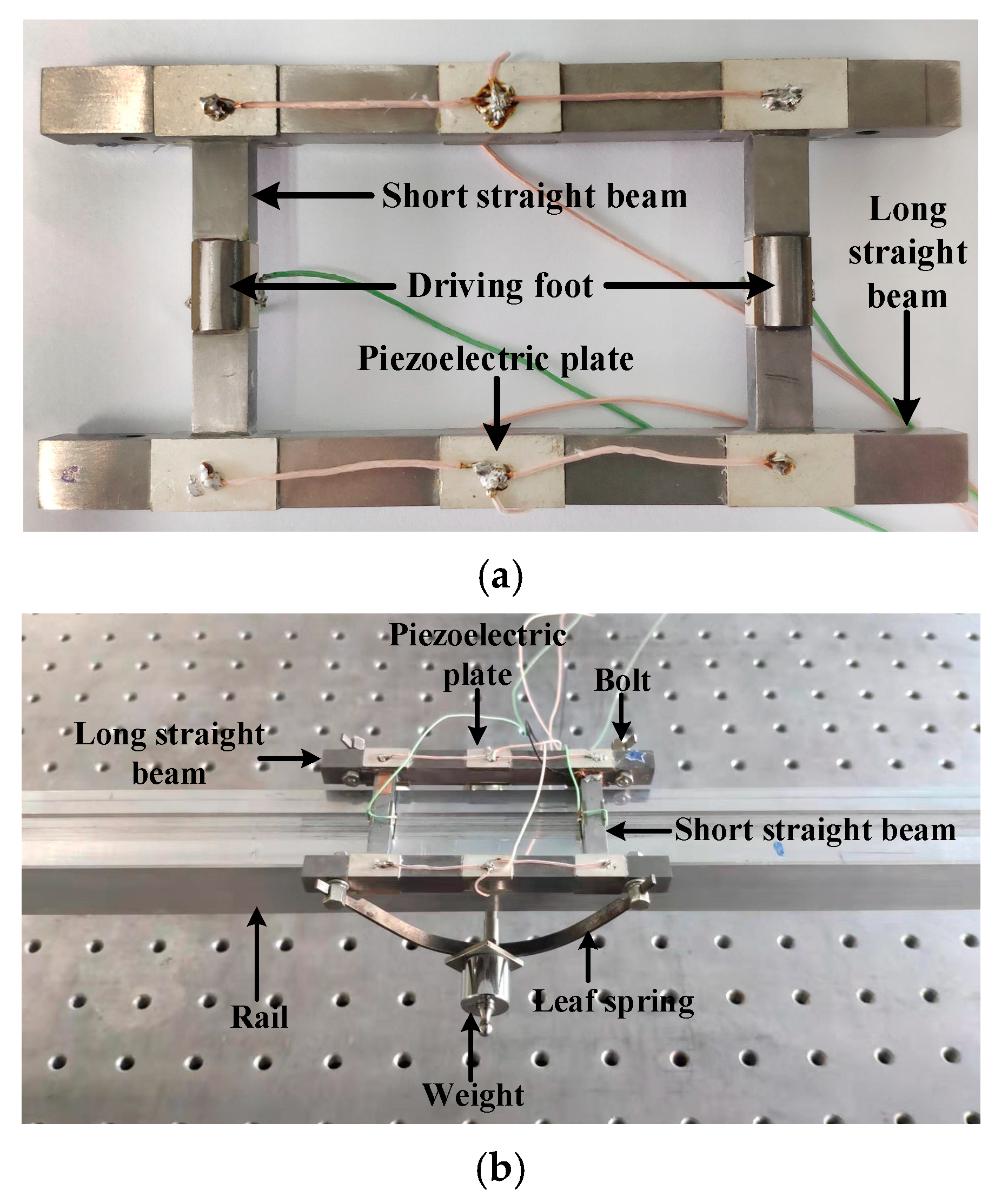
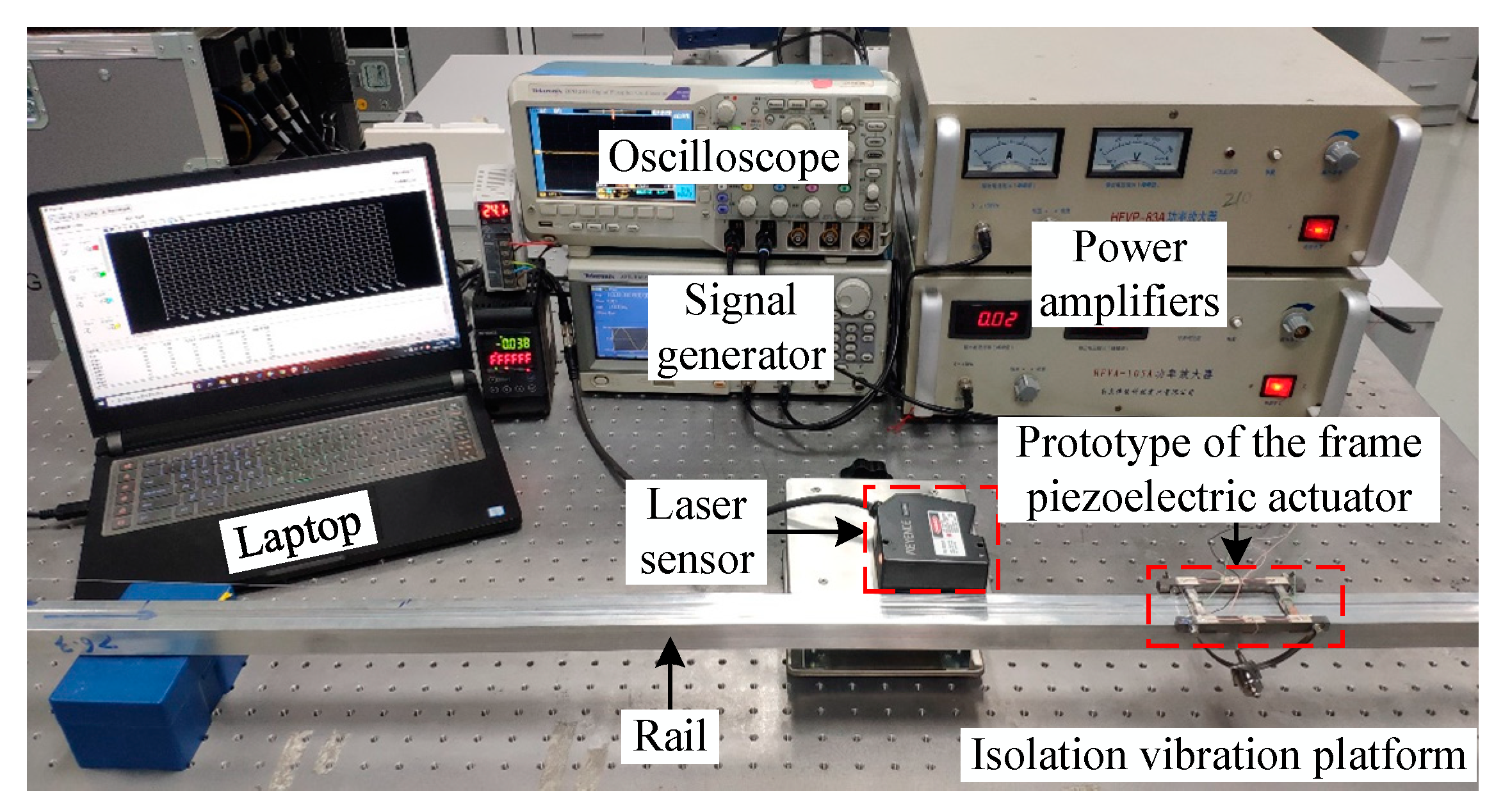
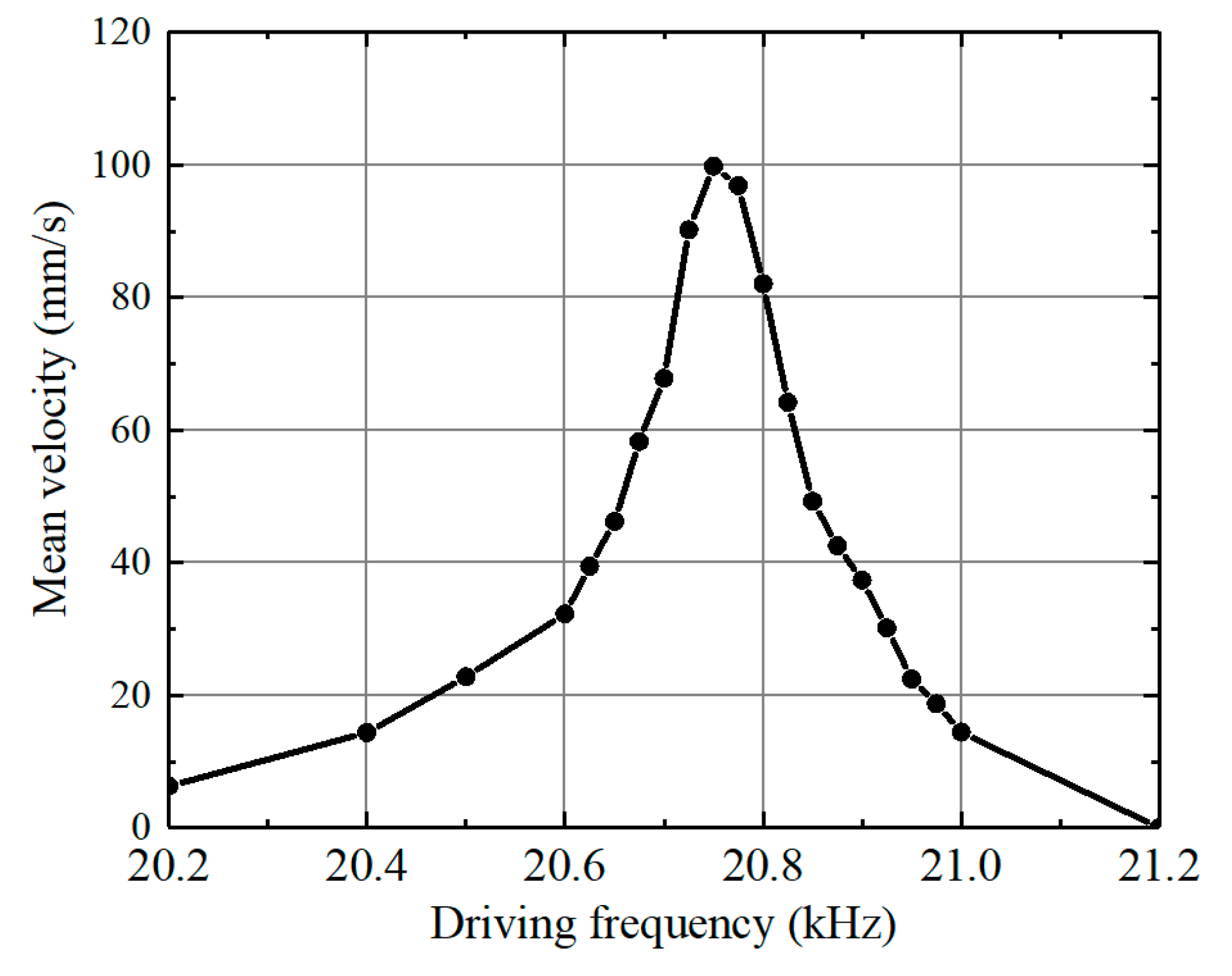
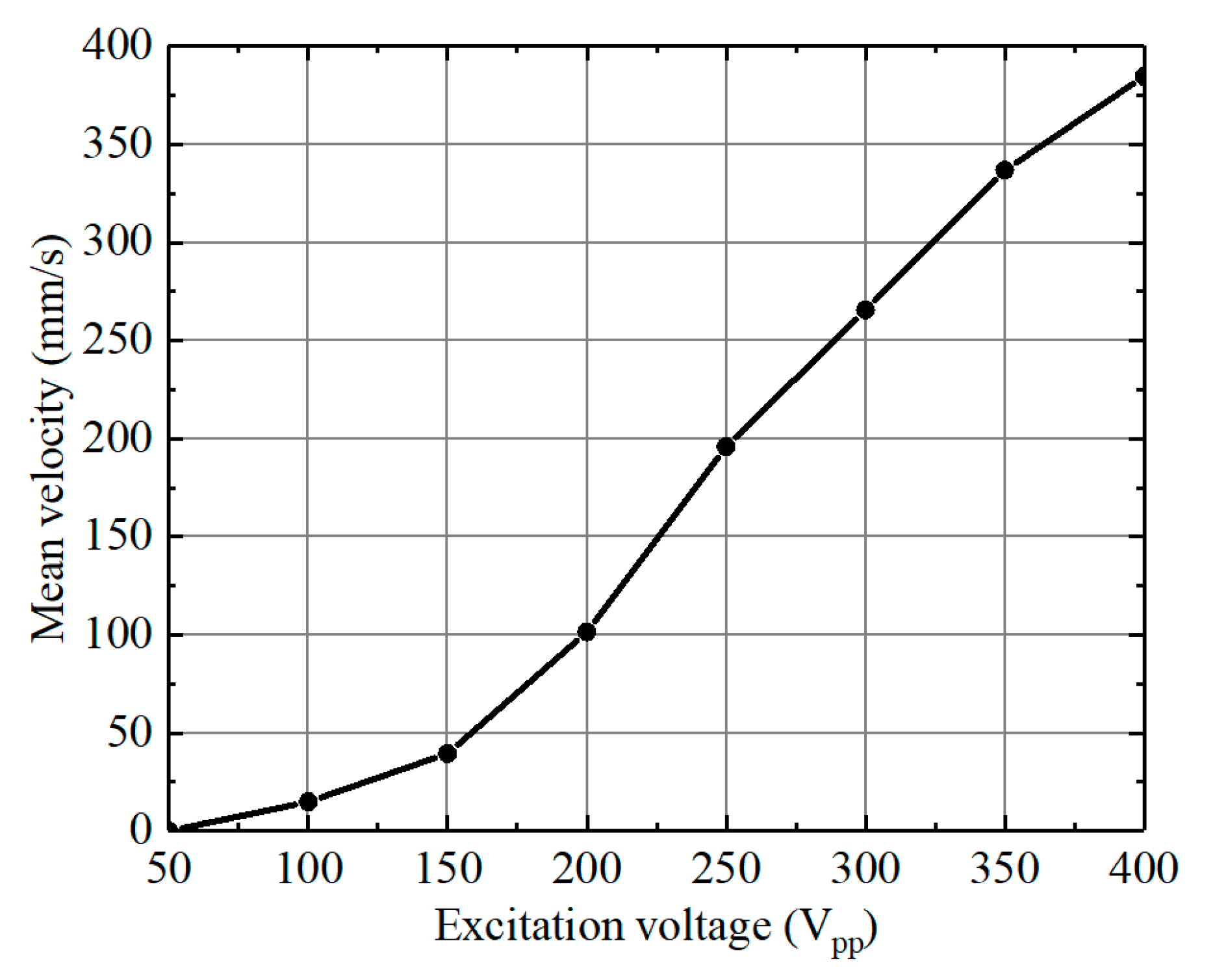
4. Experimental Investigation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Uchino, K. Piezoelectric ultrasonic motors: Overview. Smart Mater. Struct. 1999, 7, 273–285. [Google Scholar] [CrossRef]
- Zhao, C. Introduction. In Ultrasonic Motors Technologies and Applications; Science: Beijing, China, 2011; pp. 1–18. [Google Scholar]
- Mazeika, D.; Vasiljev, P. Linear inertial piezoelectric motor with bimorph disc. Mech. Syst. Signal Process. 2013, 36, 110–117. [Google Scholar] [CrossRef]
- Spanner, K.; Koc, B. Piezoelectric motors, an overview. Actuators 2016, 5, 6. [Google Scholar] [CrossRef]
- Wang, L.; Hofmann, V.; Bai, F.; Jin, J.; Liu, Y.; Twiefel, J. Systematic electromechanical transfer matrix model of a novel sandwiched type flexural piezoelectric transducer. Int. J. Mech. Sci. 2018, 138, 229–243. [Google Scholar] [CrossRef]
- Uchino, K. Piezoelectric Actuators 2006. J. Electroceram. 2008, 20, 301–311. [Google Scholar] [CrossRef]
- Peng, H.; Yang, J.; Lu, X.; Zhu, P.; Wu, D. A lightweight surface milli-walker based on piezoelectric actuation. IEEE Trans. Ind. Electron. 2019, 66, 7852–7860. [Google Scholar] [CrossRef]
- Lee, H.S.; Go, G.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Medical microrobot-wireless manipulation of a drug delivery carrier through an external ultrasonic actuation: Preliminary results. Int. J. Control Autom. Syst. 2019, 18, 175–185. [Google Scholar] [CrossRef]
- Lu, X.; Hu, J.; Zhao, C. Analyses of the temperature field of traveling-wave rotary ultrasonic motors. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 2708–2719. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Lu, Q. A simple, compact, and rigid piezoelectric step motor with large step size. Rev. Sci. Instrum. 2009, 80, 085104. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Liu, Y.; Li, K.; Zhang, S. Design, modeling and experimental evaluation of a compact piezoelectric XY platform for large travel range. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 67, 863–872. [Google Scholar] [CrossRef]
- Dabbagh, V.; Sarhan, A.; Akbari, J.; Mardi, N.A. Design and experimental evaluation of a precise and compact tubular ultrasonic motor driven by a single-phase source. Precis. Eng. 2017, 48, 172–180. [Google Scholar] [CrossRef]
- Wang, L.; Hofmann, V.; Bai, F.S.; Jin, J.M.; Twiefel, J. A novel additive manufactured three-dimensional piezoelectric transducer: Systematic modeling and experimental validation. Mech. Syst. Signal Process. 2019, 114, 346–365. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Gu, Z.; Quan, Q.; Deng, J. Development of a two-dimensional linear piezoelectric stepping platform using longitudinal-bending hybrid actuators. IEEE Trans. Ind. Electron. 2019, 66, 3030–3040. [Google Scholar] [CrossRef]
- Wang, L.; Jin, J.; Zhang, H.; Wang, F.; Jiang, Z. Theoretical analysis and experimental investigation on a novel self-moving linear piezoelectric stepping actuator. Mech. Syst. Process. 2019, 135, 106183. [Google Scholar] [CrossRef]
- Mazeika, D.; Vasiljev, P.; Borodinas, S.; Bareikis, R. Small size piezoelectric impact drive actuator with rectangular bimorphs. Sens. Actuators A Phys. 2018, 280, 76–84. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Nakamura, K. Structural parameter study on polymer-based ultrasonic motor. Smart Mater. Struct. 2017, 26, 115022. [Google Scholar] [CrossRef]
- Kurosawa, M.K.; Kodaira, O.; Tsuchitoi, Y.; Higuchi, T. Transducer for high speed and large thrust ultrasonic linear motor using two sandwich-type vibrators. IEEE Trans. Ultrason. Ferroelect. Freq. Control 1998, 45, 1188–1195. [Google Scholar] [CrossRef] [PubMed]
- Sashida, S. Ultrasonic motor. Jpn. J. Appl. Phys. 1985, 54, 589–590. [Google Scholar]
- Yan, S.; Zhang, F.; Qin, Z.; Wen, S. A 3-DOFs mobile robot driven by a piezoelectric actuator. Smart Mater. Struct. 2006, 15, N7–N13. [Google Scholar] [CrossRef]
- Jin, J.; Qian, F.; Yang, Y.; Zhang, J.; Zhu, K. A piezoelectric tracked vehicle with potential application to planetary exploration. Chin. Sci. Bull. 2012, 57, 1339–1342. [Google Scholar] [CrossRef]
- Hariri, H.; Bernard, Y.; Razek, A. A traveling wave piezoelectric beam robot. Smart Mater. Struct. 2014, 23, 025013. [Google Scholar] [CrossRef]
- Pan, C.H. Novel mobile piezoelectric micro robots driven by traveling wave. In Proceedings of the International Conference on Manipulation, Automation and Robotics at Small Scales, Paris, France, 18–22 July 2016. [Google Scholar] [CrossRef]
- Hariri, H.; Soh, G.; Foong, S.; Wood, K. Locomotion study of a standing wave driven piezoelectric miniature robot for bi-directional motion. IEEE Trans. Robot. 2017, 33, 742–747. [Google Scholar] [CrossRef]
- Wang, L.; Shu, C.; Zhang, Q.; Jin, J. A novel sandwich-type traveling wave piezoelectric tracked mobile system. Ultrasonics 2017, 75, 28–35. [Google Scholar] [CrossRef] [PubMed]
- Hernando-García, J.; García-Caraballo, J.L.; Ruiz-Díez, V.; Sánchez-Rojas, J.L. Motion of a legged bidirectional miniature piezoelectric robot based on traveling wave generation. Micromachines 2020, 11, 321. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Stiffness Coefficient (GPa) | Piezoelectric Constant (C/m2) | Poisson’s Ratio | Density (kg/m3) |
|---|---|---|---|---|
| TC4 | 112 | / | 0.34 | 4440 |
| PZT-8 | / | 7650 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Hao, B.; Wang, R.; Jin, J.; Xu, Q. A Novel Self-Moving Framed Piezoelectric Actuator. Appl. Sci. 2020, 10, 6682. https://doi.org/10.3390/app10196682
Wang L, Hao B, Wang R, Jin J, Xu Q. A Novel Self-Moving Framed Piezoelectric Actuator. Applied Sciences. 2020; 10(19):6682. https://doi.org/10.3390/app10196682
Chicago/Turabian StyleWang, Liang, Bo Hao, Ruifeng Wang, Jiamei Jin, and Qingsong Xu. 2020. "A Novel Self-Moving Framed Piezoelectric Actuator" Applied Sciences 10, no. 19: 6682. https://doi.org/10.3390/app10196682
APA StyleWang, L., Hao, B., Wang, R., Jin, J., & Xu, Q. (2020). A Novel Self-Moving Framed Piezoelectric Actuator. Applied Sciences, 10(19), 6682. https://doi.org/10.3390/app10196682