Fast and Improved Real-Time Vehicle Anti-Tracking System

Abstract
1. Introduction
- (1)
- Occlusion. Some parts of the vehicle of interest may be blocked by objects or other vehicles [3]. In our application, placing the camera behind the car will create many occultations between the vehicles.
- (2)
- External conditions. Color, intensity, texture, and lighting vary from image to image. The following vehicle is subject to many variations; not only the extrinsic changes produced by the visual system (lighting conditions, location of the camera), but also the intrinsic differences in the vehicle type (color, height, etc.) must be taken into account [4].
- (3)
- Position of the object of interest. In an image, a vehicle can be seen from the front, in profile, or from any angle. The system must also be able to deal with low-resolution images, which usually make it difficult to detect and recognize an object accurately [5].
- (4)
- Computation load. The exhaustive search of potential positions of vehicles in the full picture is prohibitive for real-time applications. The response speed is measured, in fact, for the entire system: most of the execution of all processes is done in “real-time”. Here, the term implies that the system is capable to detect and recognize a following vehicle present in the vehicle environment before it reaches it, so the driver is warned of a dangerous situation.
2. Proposed Model
2.1. Data Preprocessing
- Resizing: Due to the large number of digital cameras sold, the development of sensor technology has led to the emergence of many new products, including those with an increase in the number of sensor pixels. Having a high-quality camera is good for the eyes, but image processing does not always benefit from larger image sizes. A large number of pixels will quickly cause a large number of mathematical operations, resulting in a large number of calculations on the computer. Resizing the image is desired to improve computation. Figure 3 shows an example of adjusting the image from 240 × 360 to 190 × 290. The subject in question is still clearly visible. This is because each pixel must be processed when starting to process the image.
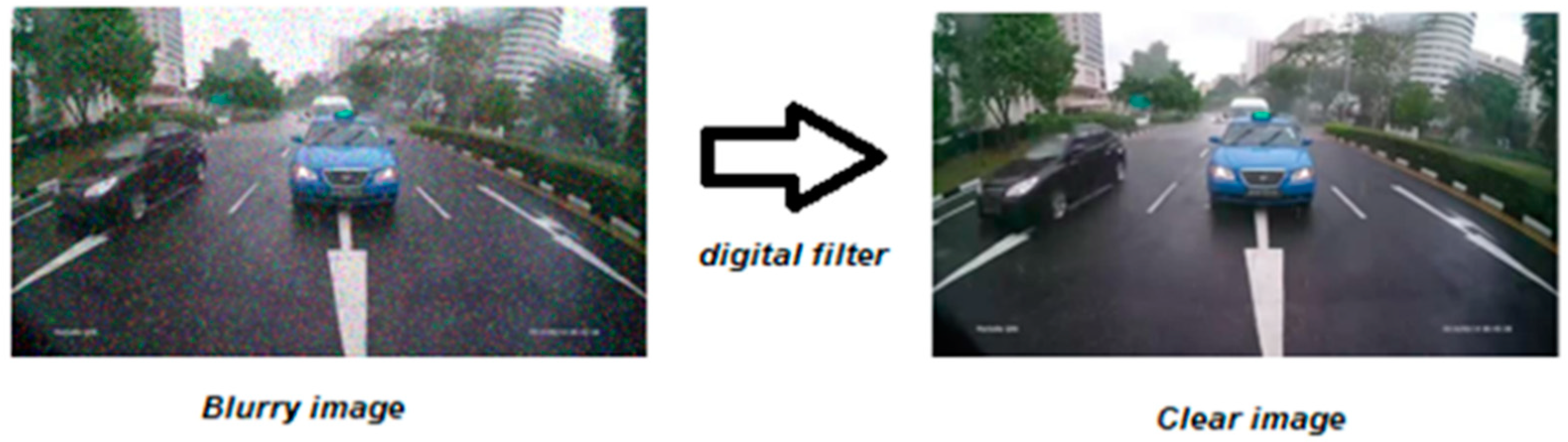
- Noise removal: To manipulate an image, we work on an array of integers that contains the components of each pixel. The treatments always apply to grey-level images, and sometimes also to color images. To improve the visual quality of the image, we must eliminate the effects of noise (parasites) by making it undergo a treatment called filtering (Figure 4). The filtering consists of modifying the frequency distribution of the components of a signal according to given specifications. The linear system used is called a digital filter.
2.2. Vehicle Detection
2.2.1. Adaboost Cascade Classifier with Haar Features
- Given example images ) where = 0, 1 for negative and positive examples respectively.
- Initialize weights = or for = 0 or 1, respectively. The variables and are the numbers of negatives and positive, respectively.
- For
- Normalize the weights,
- Select the best weak classifier for the weighted error:
- Define = where and are the minimizers of .
- Update the weights,where if example is classified correctly, otherwise, and .
- The final strong classifier iswhere .
2.2.2. Background Removal
2.2.3. Front View of the Vehicle
2.2.4. Feedback System
2.3. Vehicle Recognition
2.4. Vehicle Anti-Tracking
3. Implementation and Results
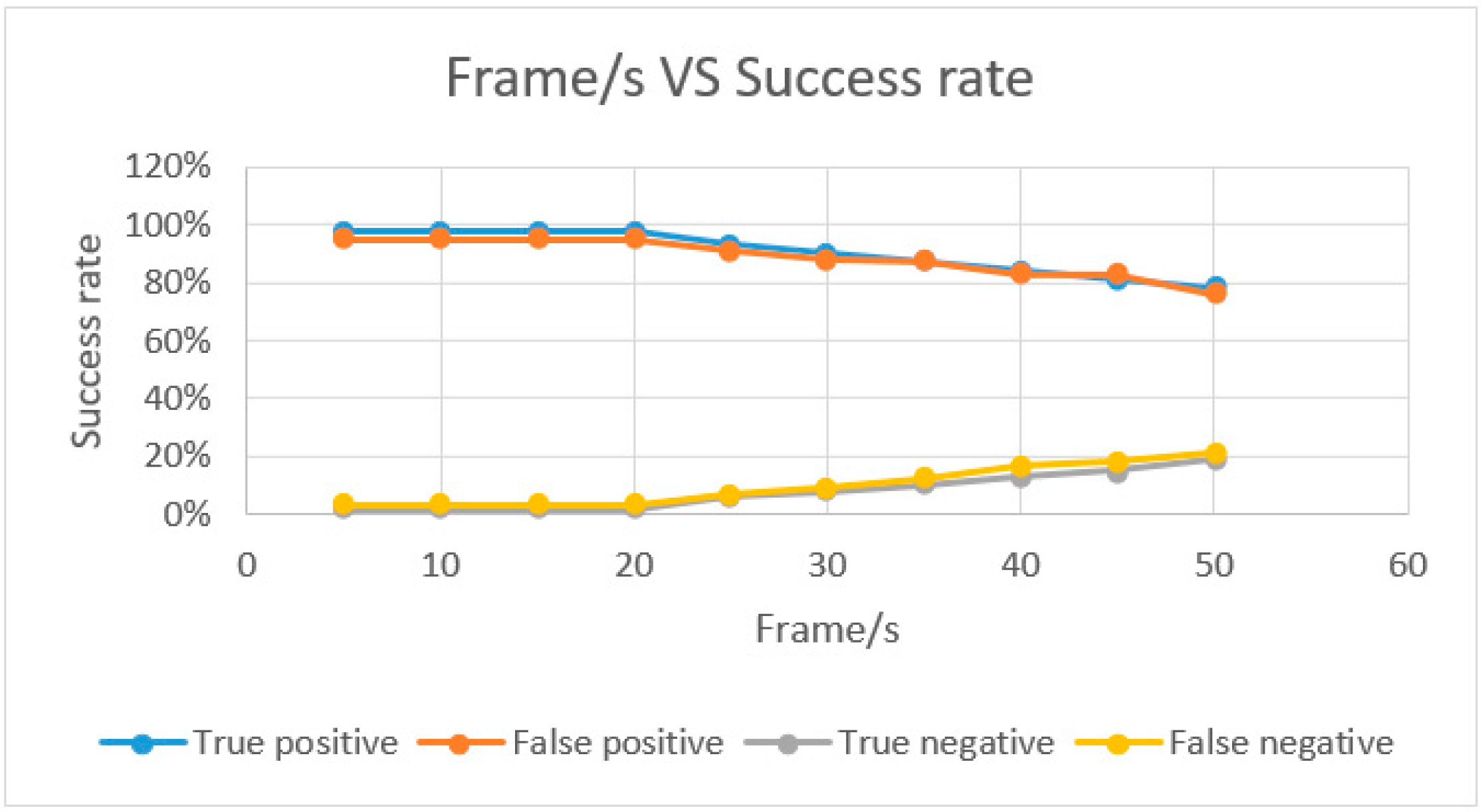
3.1. Detection System
False-Positive Rate = FP/FP + TN
True-Negative Rate = TN/TN + FP
False-Negative Rate = FN/FN + TP
3.2. Recognition System
3.3. Overall System Performance
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guvenc, I.; Koohifar, F.; Singh, S.; Sichitiu, M.L.; Matolak, D. Detection, tracking, and interdiction for amateur drones. IEEE Commun. Mag. 2018, 56, 75–81. [Google Scholar] [CrossRef]
- Yang, L.; Luo, P.; Loy, C.C.; Tang, X. A large-scale car dataset for fine-grained categorization and verification. In Proceedings of the 28th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3973–3981. [Google Scholar]
- Milan, A.; Leal-Taixe, L.; REID, I.; Roth, S.; Schindler, K. MOT16: A benchmark for multi-object tracking. CoRR 2016. [Google Scholar]
- Ofor, E. Machine Learning Techniques for Immunotherapy Dataset Classification. Master’s Thesis, Near East. University, Nicosia, Cyprus, 2018. [Google Scholar]
- Yildrim, M.E.; Ince, I.F.; Salman, Y.B.; Song, J.K.; Park, J.S.; Yoon, B.W. Direction-based modified particle filter for vehicle tracking. ETRI J. 2016, 38, 356–365. [Google Scholar] [CrossRef]
- Lu, K.; Li, J.; Zhou, L.; Hu, X.; An, X.; He, H. Generalized haar filter-based object detection for car sharing services. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1448–1458. [Google Scholar] [CrossRef]
- Saxena, E.; Goswami, M.N. Automatic vehicle detection techniques in image processing using satellite imaginary. Int. J. Recent Innov. Trends Comput. Commun. 2015, 3, 1178–1181. [Google Scholar] [CrossRef]
- Cai, Y.; Wang, H.; Zheng, Z.; Sun, X. Scene-adaptive vehicle detection algorithm based on a compositre deep structure. IEEE Access 2017, 5, 22804–22811. [Google Scholar] [CrossRef]
- Mahabir, R.; Gonzales, K.; Silk, J. A system for morphological detection and identification of vehicles in RGB images. J. Mason Grad. Res. 2016, 2, 84–97. [Google Scholar]
- Engel, J.I.; Martin, J.; Barco, R. A low-complexity vision-based system for real-time traffic monitoring. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1279–1288. [Google Scholar] [CrossRef]
- Hua, S.; Kapoor, M.; Anastasiu, D.C. Vehicle tracking and speed estimation from traffic videos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Arreola, L.; Gudino, G.; Flores, G. Object recognition and tracking using haar-like features cascade classifiers: Application to a quad-rotor UAV. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems, Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]
- Sharma, B.; Katiyar, V.K.; Gupta, A.K.; Singh, A. The automated vehicle detection of highway traffic images by differential morphological profile. J. Transp. Technol. 2014, 4, 150–156. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; van Gool, L. Speeded up robust features. Comput. Vis. Image Underst. 2007, 110, 346–359. [Google Scholar] [CrossRef]
- Bambrick, N. Support Vector Machines for Dummies; A Simple Explanation; AYLIEN—Text. Analysis API—Natural Language Processing: Dublin, Ireland, 2016; pp. 1–13. [Google Scholar]
- Cootes, T.F.; Taylor, C.J. On representing edge structure for model matching. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVRP 2001), Kauai, HI, USA, 8–14 December 2001; pp. 1114–1119. [Google Scholar]
- Seenouvong, N.; Watchareeruetai, U.; Nuthong, C.; Khongsomboon, K.; Ohnishi, N. A computer vision based vehicle detection and counting system. In Proceedings of the 2016 8th International Conference on Knowledge and Smart Technology (KST), Chiangmai, Thailand, 3–6 February 2016; pp. 224–227. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Video | Frame Rate (fps) | Total Vehicle | Detction Success Rate (%) | Tracking Success Rate (%) |
|---|---|---|---|---|
| Video 1 (Sunny) | 25 | 37 | 100 | 100 |
| Video 2 (Sunny) | 25 | 18 | 100 | 100 |
| Video 3 (Sunset) | 30 | 52 | 97 | 95 |
| Video 4 (Foggy) | 30 | 45 | 97 | 92 |
| Video 5 (Rainy) | 35 | 22 | 94 | 90 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oheka, O.; Tu, C. Fast and Improved Real-Time Vehicle Anti-Tracking System. Appl. Sci. 2020, 10, 5928. https://doi.org/10.3390/app10175928
Oheka O, Tu C. Fast and Improved Real-Time Vehicle Anti-Tracking System. Applied Sciences. 2020; 10(17):5928. https://doi.org/10.3390/app10175928
Chicago/Turabian StyleOheka, Olivier, and Chunling Tu. 2020. "Fast and Improved Real-Time Vehicle Anti-Tracking System" Applied Sciences 10, no. 17: 5928. https://doi.org/10.3390/app10175928
APA StyleOheka, O., & Tu, C. (2020). Fast and Improved Real-Time Vehicle Anti-Tracking System. Applied Sciences, 10(17), 5928. https://doi.org/10.3390/app10175928