1. Introduction
Since their origin, dating in China back to around the 3rd millennium BC [
1], bells have been widely used as musical percussion instruments for religious rites and other relevant events.
Starting from the early Middle Ages, bells knew a large diffusion also in Europe and in the Christian world, so that tower bells became a normal addition of churches and other important municipal or civil buildings.
From the musical point of view, according to the Musical Instrument Museums Online (MIMO) revision [
2,
3] of the Hornbostel–Sachs classification [
4] the bells are directly struck idiophone instruments, that vibrate “without requiring stretched membranes or strings”. The sophisticated categorization of bells given in [
2] is a function of the mounting, of the position and of the way they are struck, but for the aim of the study a more rudimentary distinction is enough.
Depending on the position, bells can be classified as:
resting bells, whose “cup is placed on the palm of the hand or on a cushion; its mouth faces upwards”, not relevant for the aim of the study, or
suspended bells.
Suspended bells are grouped in three main subcategories, depending on the way they are struck:
- b1.
bells, often without internal clapper, struck from outside with a separate hammer,
- b2.
clapper bells, characterized by an internal clapper,
- b3.
bells with attached external clapper.
Oriental religions generally utilize bells belonging to type b1 or b3; on the contrary, in the Christian context, church bells generally fall in type b2, even if, in particular cases, or events, they can also be struck from outside.
Depending on the excitation, clapper bells can be rung in two different ways. In fact, the vibrations can be excited by clapper strokes indirectly caused by the swinging bell, or by chimes, i.e., leaving the bell quite motionless and directly striking the clapper against it. The latter technique is typical of the Orthodox Church tradition, while in the rest of Christianity swinging bells are the rule, even if in most cases, for conservation purposes, they are chimed via motorized devices.
Swinging clapper bells raise intricate mathematical and physical problems, covering sound and acoustic engineering, mechanical engineering, and structural engineering as well.
As already noted, the swinging bell is a peculiar musical instrument played with a device, the clapper, whose movements, although directly excited, are not explicitly controlled by the bell ringer. The achievement of a clear and optimal sound thus relies not only on the acoustic characteristics of the bell but also on the regularity of the clapper strokes, which depends on the parameters of clapper and bell governing the equations of motion. Such parameters have been empirically tuned over centuries of practical experience leading to standardized proportions, nevertheless, in some cases, the sound control could result extremely difficult even when the bells are driven by well experienced bell ringers. In fact, if on the one hand, in case the bells are manually rung, some odd behavior can be compensated by skilled bell ringers duly modifying the excitation, on the other, in case the bells are swung by motors, fine real time adjustments are practically precluded.
It must also be underlined that different layouts are adopted to suspend the bells, mainly depending on: the ringing technique; the weight of the joke, eventually contributing to counterweight the bell; the position of the bell pivot with respect to the center of gravity of the bell; the distance between the clapper pivot and the bell pivot. The discussion of the rationale and consequences of different arrangements is out of the scope of the present paper, but it must be stressed that distinctive features of bells are also influenced by the technique intended for ringing them.
As described in [
5], generally, they can be distinguished:
the “flying clapper” ringing technique, mainly used in continental Europe, except the Iberic peninsula and north Italy,
the full circle techniques, like the English full circle ringing or change ringing technique [
6,
7,
8,
9], and the Italian “Bolognese”, “Veronese”, and “Ambrosiano” styles,
the Spanish system, typically used in Iberic peninsula.
In the “flying clapper” technique, the maximum oscillation of the bell, which is not counterweight, is around 90°, although in some cases it can attain 135°, and the clapper strikes the bell on the upper part of the mouth. Occasionally, in France, Belgium, and the Netherlands also the opposite “falling clapper” scheme is adopted, where the clapper strikes the lower part of the mouth.
The full circle techniques are based on alternate full circle oscillations, which facilitate the sound control. The bells are firstly driven in the upward position, where they are briefly stopped with the help of suitable devices or even manually, and then put in oscillations, which are maintained accurately adjusting the excitation. The English full circle and the Bolognese style use unbalanced bells, on the contrary “Veronese” and “Ambrosiano” styles adopt balanced bells.
In the Spanish system, balanced bells continuously rotate full circle in one direction [
10,
11,
12,
13].
From the above considerations, it clearly emerges that study of swinging bells can involve:
the assessment of the acoustic characteristics of the bell itself, intended as a musical instrument,
the quality and the precision of the sound, depending on the ease of controlling the clapper impacts during the oscillations, and
the interactions between the swinging bell and the supporting structures: belfry and bell tower.
The acoustics of the bells is a very specialized topic, outside the scope of the present study, therefore it will not be further discussed. The interested reader can find some basic information about theoretical, experimental, or numerical acoustic studies in [
14,
15,
16,
17].
Truly, the ease of controlling the impacts significantly influences the acoustic performance of the bell; in fact, as remarked in [
18], “the “ringability” of bells depends not only on the linear acoustics of the modes and natural frequencies of the bells but also on the rotational dynamics of the bell and clapper, interacting through impact each time the clapper strikes the bell surface.”
The inertia forces due to the swinging of the bell play a crucial role in dynamic identification [
19] or assessment of existing bell towers [
8,
9,
10,
11,
12,
13,
20,
21,
22,
23,
24,
25], especially when the frequency of the bell oscillations is in the neighborhood of the relevant natural frequencies of the tower. Some analytical solutions for bell-tower interaction are given in [
13], considering free oscillations and different mounting systems. However, some studies focus on the seismic response of the bell itself [
26].
The time histories of bell and clapper rotations and support reactions are commonly studied in the framework of the Lagrangian mechanics, following the approach proposed by Lagrange [
27,
28], which is described in detail in every modern book of theoretical mechanics [
29,
30,
31]. The analytical model of the bell, based on rigid body dynamics, originally suggested by Veltmann [
32] in the 19th century, was recovered in the late 20th century by Threlfall and Heyman [
33], who also suggested a simple experimental method to derive the inertia forces transmitted by full circle ringing bells. Since then, several studies have been carried out, shortly discussed in the following.
A recurrent simplification disregards the presence of the clapper; the bell motion is thus governed by the ordinary differential equation (ODE) of the physical pendulum, depending on two independent initial conditions. But, as better illustrated in
Section 2, more refined approaches lead to a system of two second-order nonlinear ODEs. The solutions of that system are the time histories of bell and clapper rotations, provided that four independent initial conditions are given.
It must be underlined that, except in the case of small amplitude oscillations, when the physical pendulum equation can be linearized, the ODEs are always nonlinear, even if springs and dampers are not present. That peculiarity significantly distinguishes the swinging bell model from the simple harmonic oscillator, whose behavior is nonlinear only if nonlinear terms are explicitly introduced, like, for example, nonlinear restoring forces or springs in the Duffing oscillator [
34]. Sometimes Duffing oscillator has been also used to approximate the nonlinear pendulum equation, based on the McLaurin expansion of the sinus function, but these aspects are outside the scope of the study.
To solve the swinging clapper bell problem, many different approaches have been proposed, alternatively concentrating the attention on the bell-clapper interactions or on the bell-tower excitation. Frequently, aiming to obtain convenient expressions of the equations, drastic simplifications are introduced, so arriving at suitable analytical or numerical solutions.
Noteworthy simplifications, often combined, may include:
neglecting the clapper, so that the bell reduces to the already cited physical pendulum,
neglecting the damping, thus considering only undamped oscillations,
considering only viscous damping,
disregarding external forces, thus considering only free oscillations,
disregarding the transient phase, dealing with forced oscillations,
suitably modifying the forcing functions to obtain “workable” equations from the analytical [
22], or the numerical point of view [
35,
36,
37,
38],
adopting simplified models to describe the impact of the clapper on the bell.
However, if analytical solutions are available only for special cases, also usual numerical approaches can result unsatisfactory. In fact, numerical solutions reported in the relevant literature are commonly obtained adopting built-in algorithms for the solutions of ODEs, available in advanced software packages, like Matlab®. These algorithms are frequently based on Runge–Kutta methods. The availability of such sound and validated algorithms, characterized by clearly defined limitations, is certainly beneficial, but resorting to them involves rather evident disadvantages, because these general methods are scarcely flexible and not easily adaptable to handle specific problems.
Moreover, hypothesizing viscous damping only and assuming special forcing functions, the field of application of these “traditional” approaches sensibly reduces.
With regards to the previous remarks, it must be stressed, on one hand, that other kinds of damping, like friction damping, can play a key role and on the other, that different forcing functions can be envisaged in stationary or transient phases, also depending on the type of excitation−manual or automatic, and on the type of the motorization: linear, or rotating, or even contactless, if any.
Since the pivots are generally equipped with bushes or roller bearings, in which dissipative forces depend on the radial reaction forces, friction damping appears as the most appropriate model. Nevertheless, it is common practice to adopt an “equivalent” viscous damping model, so drastically simplifying the equations. Unfortunately, as confirmed by the outcomes of the study, the equivalence holds on a limited range of oscillation amplitudes, so that the parameters of the equivalent model should be continuously adjusted and adapted, depending on the actual situation.
Regarding the forcing functions, it is noteworthy that a typical transient is the starting phase, in which the bell is set in motion and suitably excited until a pre-established configuration is achieved. Especially in the case that the bells are manually driven or contactless excitations are adopted, the forcing functions are often optimized to be “resonant”, i.e., continuously and suitably tuned by an external device or by a trained bell ringer to match the instantaneous natural frequency of the system, which is a function of the amplitude of the oscillation.
For these reasons, an ideal and fully featured method to solve the ODEs of motion should allow:
to take into account both viscous and friction damping,
to consider “arbitrary” forcing function,
to determine the solution in both stationary and transient phases,
to introduce or to deduce “resonant” excitations, automatically tuned on the instantaneous natural frequency of the system.
In addition, the method should work also with “stiff equations”.
The aim of the study is the setup of an original all-purposes general procedure to solve the system of ODEs describing the motion of the bell and of the clapper.
The proposed algorithms discussed in
Section 6 are based on explicit-implicit predictor-corrector integration methods with constant time step, directly operating on the ODEs system. They do not require any preliminary manipulation of the equations themselves, with evident advantages. To highlight their flexibility, two slightly different versions of the algorithms are presented:
a moderately simplified version, in which the prediction-correction phase works only on the rotations of bell and clapper,
the complete, more refined, version, in which the convergence is improved thanks to an additional prediction-correction phase regarding the angular velocities and the angular accelerations too.
The paper is organized as follows:
Section 2 illustrates the deduction of the ODEs governing the problem.
Section 3 refers to the model of the clapper to bell impact and how it is considered in the equations.
Section 4 illustrates the friction and viscous damping models, while
Section 5, considering the dissipative moments corresponding to damping phenomena, describes the general form of the nonlinear system of ODEs.
Section 6 illustrates in detail the implementation of the proposed algorithms.
Section 7 deals with the validation of the proposed method, checking its capability to reproduce some relevant theoretical or experimental results. To enrich the comparison, the convergence of the proposed algorithms is assessed, and its dependence on the time step and other influencing parameters is critically discussed, also considering “stiff” equations. Of course, that section is not essential for the understanding of the remaining parts of the paper.
Section 8 considers a significant case study, consisting in the old tenor bell of the Great St. Mary’s church in Cambridge, whose characteristics are precisely reported in [
17]. Several relevant situations are analyzed, considering damped or undamped conditions; free oscillations; forced oscillations; stationary or transient phases; different initial conditions; demonstrating the main features and the potentialities of the proposed algorithms.
Section 9 summarizes the main conclusions, envisaging further developments.
The novel approach and the algorithms proposed in the paper allow one to overcome the limitations affecting the “traditional” approaches proposed until now; in fact, besides satisfying all the previously recalled requisites (a−c), they are also able to derive or to define resonant excitations and to solve stiff equations, as well. Independently on the oscillation amplitude and on the duration of the considered time interval, the algorithms can successfully manage undamped oscillations; friction and viscosity damped oscillations; free oscillations in transient and stationary phases; and can be applied also to solve stiff equations. Furthermore, the capability of the proposed methods to deal with arbitrary forcing functions is particularly innovative.
Typical outcomes of the method are time histories and phase plots in transient and stationary phases of relevant parameters under “arbitrary” forcing functions, including the excitations transmitted to the belfry and the bell tower through the supports. Even in the paper the attention is mainly concentrated on “unbalanced” swinging systems; the proposed methods apply also to the other system previously cited.
2. The Governing Equations
In the classical Lagrange–Euler approach, the equations of the bell and clapper dynamics can be easily derived starting from the Lagrangian function
of the two degrees of freedom system,
where,
is the angle between the axis of the bell and the vertical axis,
the relative angle between the clapper axis and the bell axis (
Figure 1),
and their first derivatives with respect to the time , i.e., their angular velocities, respectively,
the kinetic energy of the system,
and its potential energy.
Referring again to
Figure 1, let
be the pivot of the bell,
the pivot of the clapper, and
their distance,
, being
and
the ordinates of
and
, respectively.
An error affecting the position of the pivot of the clapper is hypothesized. Be
such an error, which is the distance
between the actual position
of the clapper pivot and its theoretical position. Obviously, the positioning error can be expressed in other terms by means of the angle
,
Although the positioning error, typically ranging in the interval , is significant only for small bells; it is considered here for the sake of generality.
Said:
the center of gravity of the bell,
the center of gravity of the clapper,
the mass of the bell,
the mass of the clapper,
the distance between the center of gravity of the bell and the bell pivot ,
the distance between the center of gravity of the clapper and the clapper pivot ,
the moment of inertia0 of the bell about ,
the moment of inertia of the clapper about ,
the velocity of ,
Substituting
in Equation (3) and recalling Equation (5), the Lagrangian function becomes
Finally, considering generalized forces, the system of nonlinear ordinary differential equations
is obtained, where
and
are the external torque moments, if any, acting on the bell and on the clapper, respectively,
the dissipative moment at the bell pivot and
the dissipative moments at the clapper pivot, as illustrated in
Figure 2.
It is quite obvious to remark that and are oriented to resist the motion of the bell and of the clapper, respectively, while resists the motion of the bell only if ; on the contrary, when , contributes to the motion of the bell.
The application of Lagrangian mechanics is rigorously limited to nondissipative systems, even if, under certain conditions, it can be extended also to dissipative systems [
39,
40]. Nevertheless, since Newtonian mechanics can be applied also in case of dissipative systems, Equation (8) can be considered as dynamic equilibrium equations and the dissipative forces in the right sides as external forces.
Typical dissipative moments are associated to viscosity or friction. In the classical oscillation theory, dissipation is associated to linear viscous dampers, where resisting forces are proportional to velocities through equivalent damping coefficients. In the study, it has been considered also friction damping, characterized by resisting forces which are nonlinear functions of the displacements or of their time derivatives, as better illustrated in the following.
After some manipulations, omitting variables in the moment expressions, Equation (8) becomes,
which is a system of two nonlinear second order ordinary differential equations (ODEs), whose solution depends on the given initial conditions.
It must be stressed that the solution is represented by piecewise-defined functions, each one continuously differentiable in appropriate subspace domains corresponding to subintervals of the closed interval where the clapper can freely swing (
Figure 3):
When positioning errors are considered and odd clapper impact occurs, the interval becomes
As illustrated in
Figure 3, in Equation (11)
and
are given by:
where
When the swing angle of the clapper attains a limit value, the clapper impacts the bell, the angular velocities of the clapper and of the bell suddenly change, and a new “piece” of the solution, duly connected with the preceding one, is initialized. Obviously, if two consecutive clapper impacts occur on opposite sides of the bell, the corresponding “piece” of the solution is defined on the closed interval given by Equation (10) or by Equation (11); otherwise, it is defined on a left closed or a right closed subinterval of it, depending on the evolution over time of the relative clapper-bell configurations.
The modeling of the impact is discussed in the next section, but it can be anticipate that the use of coefficient of restitution (COR) in terms of relative velocity, like in the classical Newton approach, seems to be the most appropriate for the purposes of the present study.
3. Modelling the Clapper Impact
Over the years, several approaches have been proposed to model the clapper to bell impact, also depending on the aim of the specific study. In classical approaches, the impact is modelled from macroscopic point of view, based on the coefficient of restitution [
41]. The coefficient of restitution is a simple and synthetic macroscopic parameter, which summarizes not only the intricate interactions occurring during the impact, but also the influence of the clapper and bell geometry and of the ringing style on the impact itself. The coefficient of restitution can be alternatively defined:
in kinematic terms, as ratio between the relative orthogonal velocities after and before the impact, according to the Newton definition,
in kinetic terms, as ratio between the normal impulses during the restitution phase and the compression phase, according to the Poisson definition, or
in energetic terms, as recently suggested in [
42], as ratio between the works done during the restitution phase and the compression phase.
In case of the bell, the COV “measures” also the efficiency of the energy transfer between clapper and bell, in exciting bell vibrations. Manifestly, different definitions of COR are equivalent only if the impact is frictionless; on the contrary, as remarked in [
42], if friction between the impacting bodies is relevant, hypothesizing the equivalence leads sometimes to illogical results.
Recently, more sophisticated models have been proposed, particularly focusing on the influence of the impact on the integrity [
43] or the acoustic performance of the bell, but a careful examination of these sophisticate models is outside the scope of the present work.
In the present case, the kinematic approach in terms of relative velocities appears particularly comprehensible. The impact phase is studied applying the law of conservation of angular momentum of the whole system with respect to the bell pivot
in the configuration assumed by the system when the impact occurs (
Figure 4). According recurrent assumptions and considering that the impact is quite instantaneous, the impulse of ordinary forces, if present, the energy losses at the pivot, and the displacements of body particles, have been disregarded during the impact phase.
Said
the kinematic coefficient of restitution of the clapper, it results
where
and
are the relative angular velocities of the clapper at the time of impact and at the end of the impact, respectively. As known,
corresponds to an impact against massless bell,
to the perfectly plastic case, and
to an ideal perfectly elastic impact against a fixed surface, in the latter case, the kinetic energy of the system is obviously conserved.
The kinematic COR can be easily measured in practice by means of high-speed video cameras, using super slow-motion video recording capabilities of such kind of devices.
As already said, the clapper strikes the bell each time it holds one of the conditions
holds. For example, referring to the case
, the angular momentum
of the system around
is:
In Equation (16)
is the distance
between the bell pivot and the clapper center of gravity in the impact position (
Figure 4),
and
is the measure of its projection on the clapper axis.
Said
the moment of inertia of the clapper around
in that position,
the moment of the inertia around
of the whole system,
and
the term pertaining to
in (16)
the law of conservation of the angular momentum for an isolated system gives
being
and
the angular velocities of the bell before and after the impact, respectively.
Recalling Equation (14),
is easily obtained from Equation (21) as
Finally, the variations of the angular velocities during the impact result:
Equations (14) and (22) allow to consider the impact effects in a very effective way, since they constitute, together with the pertinent condition on
(Equation (15)) and the corresponding value of
at the end of the impact, the initial conditions for the subsequent “piece” of the piecewise-defined solution. From another point of view, these variations can be simulated setting the angular accelerations,
and
, at the
step in the form
in which
is the relative angular velocity of the impacting clapper and
the time step adopted in numerical integration. Similar conclusions can be derived from the impulse-momentum theorem.
As said before, refined evaluation of the coefficient of restitution would require much more sophisticated modelling of the impact phase, nevertheless the simplified approach proposed above can be easily improved and corrected; on one hand, to avoid physical paradoxes, on the other, to properly consider additional phenomena associated with the impact.
First, it must be remarked that the bounds on
given in Equation (14) can be finer tuned, since, on the light of what previously discussed, in a swinging bell
infringes the law of conservation of energy. For physical coherence, the effective relative angular velocity between the clapper and the bell after the impact,
, involving not only
, but also
, should satisfy the conditions
that, recalling Equations (14) and (22), finally provides
in which the upper bound corresponds to a perfectly elastic impact.
It must be stressed that, while in the first clapper stroke(s) a considerable part of energy is spent to induce vibrations in the bell, in the subsequent ones the transfer is less relevant, being only responsible for maintaining the vibrations themselves. The first impacts are thus characterized by lower coefficients of restitution. Furthermore, in some cases bell ringers cover a side of the clapper with felt pads to muffle the sound as a function of the side of impact. In any case, these aspects can be simply managed, varying the COR as a function of the strike sequence or of the impact side.
At this point, it could be argued that the bell is not an isolated system, because part of energy, associated with the acoustic waves, leaves the system. This facet can be tackled suitably modifying the second Equation (23), and expressing the variation of the bell angular velocity
as
in which
is the quota of the angular momentum,
, transferred by the clapper to the bell during the impact, which is spent to excite bell vibrations.
8. Some Relevant Case Studies Referring to St. Mary’s Tenor Bell
The nonlinear ODE system and the proposed numerical algorithms have been applied to solve some relevant problems, referring to the St. Mary’s old tenor bell. In these problems, the coefficient of restitution has been always assumed , unless otherwise specified in the following.
More precisely, the considered cases studies consist in:
Large undamped free oscillations of the bell considering four significant cases, characterized by different sets of initial conditions:
Case I.a: initial conditions as per Equation (63), i.e., the bell starts ringing right,
Case I.b: initial conditions as per Equation (64), i.e., the bell starts ringing wrong,
Case II.a: initial conditions , i.e., the bell starts ringing right,
Case II.b: initial conditions , i.e., the bell starts ringing wrong.
Assuming nearly equivalent logarithmic decays for small oscillations, comparison of curves resulting from viscous and friction dissipative models, considering initial conditions as per Case I.
Considering initial conditions as per Case I.a, assessment of time histories of horizontal and vertical excitations on the pivots in three subcases: undamped oscillations; friction damped or “equivalent” viscous damped oscillations
Synchronized resonant forced oscillations of the bell in transient phase.
8.1. Large Undamped Free Oscillations
As already said, large undamped free oscillations have been considered in two relevant cases, characterized by different initial angles : in case I or in case II.
8.1.1. Case I Undamped Free Oscillations
Relevant curves regarding undamped oscillations of the bell in cases I.a and I.b, both starting from
, are compared in
Figure 12.
Figure 12a,b illustrates
and
curves,
Figure 12c,d show
curves, and
Figure 12e,f
curves.
It must be stressed that, despite that damping is nil, energy is not conserved, since in both cases, as anticipated, the clapper impact is not perfectly elastic .
The analysis of the results shows that, in the given conditions, the bell tends to maintain the initial ringing condition. More precisely, if the bell starts ringing wrong, it continues to ring wrong. Nevertheless, as clearly results from
Figure 12b, while in a first phase the bell ringing wrong exhibits two well distinct impacts per semicycle, over time the impacts become more regular, and only one instantaneous and clear contact occurs per semicycle. Moreover, the number of significant impacts (
Figure 12a,b) and the angular relative velocity
at the time of impacts (
Figure 12c,d) are higher in the ringing wrong case I.b than in the ringing right case I.a; case I.b is thus characterized by more pronounced dissipation and transfer of energy, as the comparison of
Figure 12e,f clearly demonstrates.
In addition, said
the amplitude and
the “apparent period” of the
cycle, defined as the time interval between
and
, apparent logarithmic decrements of amplitude,
, and period,
, can be defined. In the following, these apparent logarithmic decrements are evaluated considering the first five apparent periods, according to:
The outcomes of the analysis are summarized in
Table 6, which confirms that case I.a is characterized by smaller apparent logarithmic decrements.
Although marginal in the present paper, another important question regards the aptitude of the bell to maintain the initial ringing condition, especially when initial condition is wrong. As already remarked, the adoption of a coefficient of restitution implies that in case I.b the bell tends to ring wrong, but this is not always the case.
Truly, hypothesizing higher values of the coefficient of restitution the result can be the opposite. For example, assuming
, the curves
and
resulting in cases I.a and I.b become those illustrated in
Figure 13a,b, respectively. Curves in
Figure 13a confirm that, like in
Figure 12a, the bell lasts in ringing right state over time; on the contrary, curves in
Figure 13b show that, after some cycles, three in that case, the ringing state switches from wrong to right.
The tendency to stay in “wrong” condition thus depends not only on the relevant ratios and but also on the COR. Moreover, as shown in the following, that tendency depends not only on the quotas of energy dissipated or transferred outside the system during the impact but also on the extent and on the nature of other dissipative phenomena.
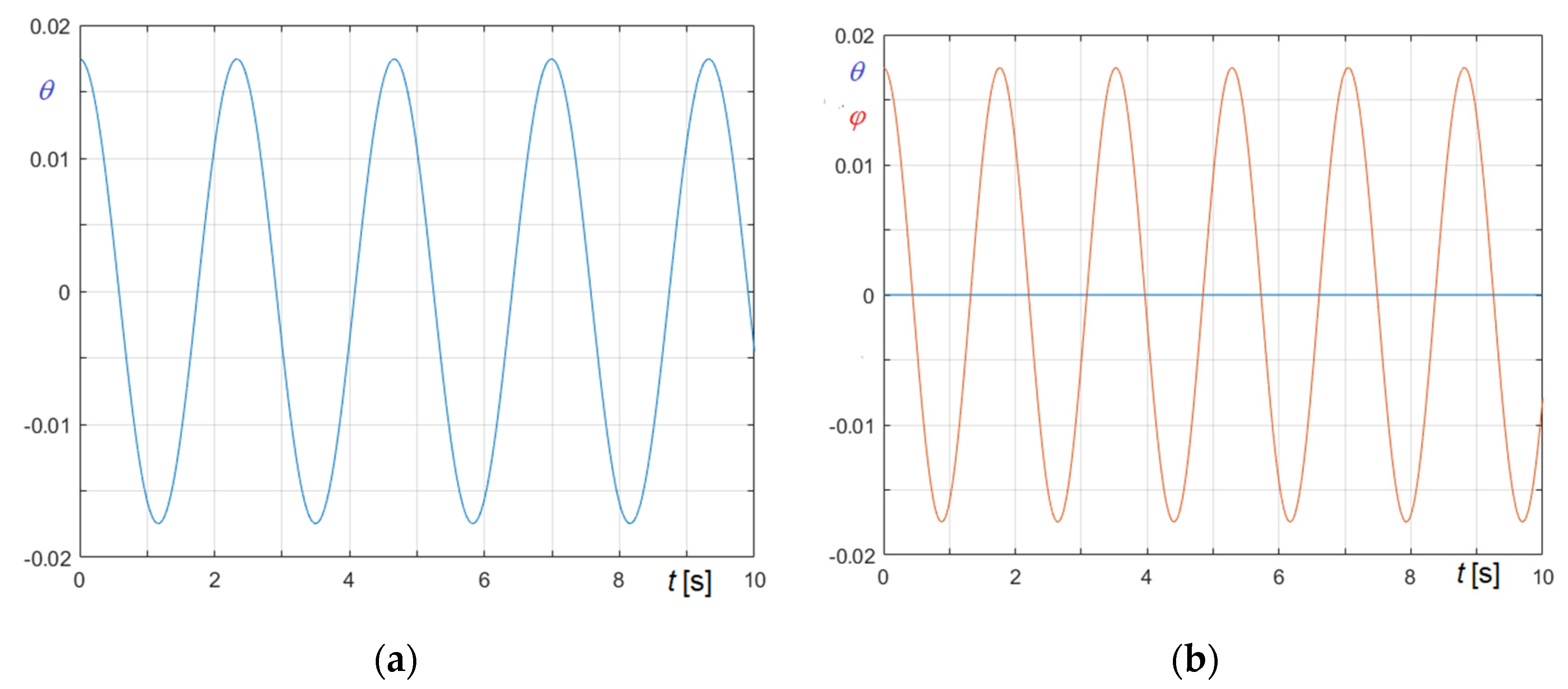
8.1.2. Case II Undamped Free Oscillations
Results regarding case II, undamped oscillations of the bell starting from
, are reported in
Figure 14a,b in terms of
and
curves, in
Figure 14c,d in terms of
curves, and in
Figure 14e,f in terms of
curves, in analogy with the criterion adopted for case I.
It must be underlined that in case II.b there are no impacts, while in case II.a, on average, impacts occur about every two oscillations. That results even more clearly from
Figure 15a,b, which illustrates the time−angular acceleration curves
and
obtained in case II.b adopting
. In the figures, impacts obviously correspond to sudden variations, whose extents, recalling Equation (23) or (24), are inverse function of the adopted time step.
These remarks are further corroborated by
Table 7, evidencing that in case II.a part of energy is lost, while in case II.b, lacking any kind of dissipation, the energy is conserved.
The latter observation confirms that the proposed methods are symplectic integrators and that the energy drift is practically nil.
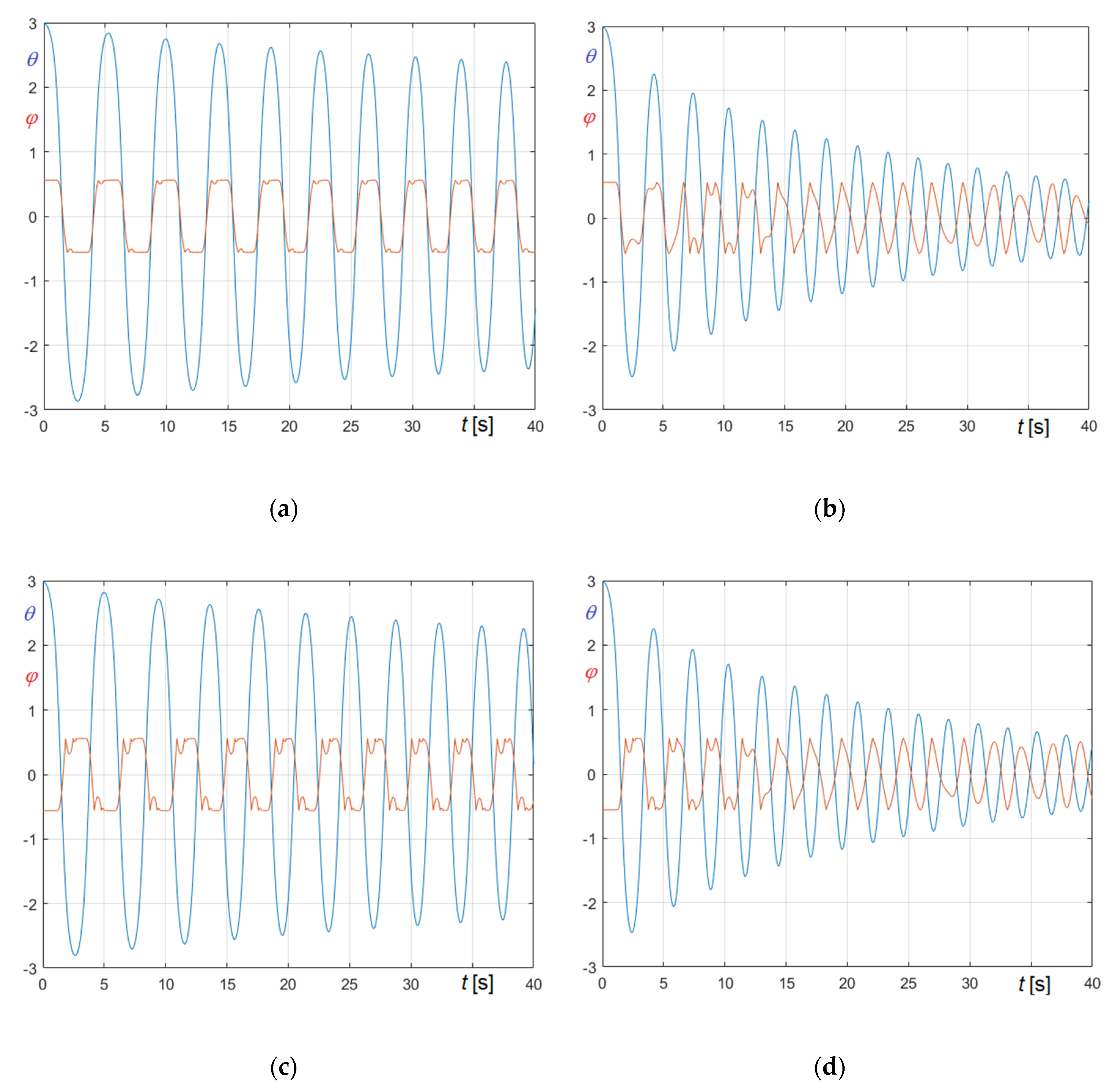
Recalling Equations (33) and (34), the radial accelerations at the clapper pivot
and at the bell pivot
, including gravity acceleration, can be finally obtained as
Referring again to case II.b, the resulting time histories of the dimensionless horizontal and vertical component of the radial accelerations in pivots
and
are illustrated in
Figure 16. More precisely,
Figure 16a,b refers to horizontal components
and
, while
Figure 16c,d refers to vertical components
and
.
As expected, that amplitude does not induce significant excitation on the supports.
8.2. Viscous and Friction Damped Free Oscillations
Aiming to compare “equivalent” damping phenomena, case I.a has been studied considering viscous or friction damping as well. Preliminarily, the equivalence between viscous and friction damping has been assessed.
As known, the period,
, of viscous damped small free oscillations is constant over time; it depends only on the damping ratio
and on the period,
, of undamped oscillations, being independent on the exponentially decreasing amplitude of oscillations
On the contrary, the apparent period of friction damped oscillations rigorously depends, besides on the friction coefficient, also on the amplitude of the oscillations; consequently, it varies over time, although slightly and the system generally does not retrieve the rest position. Given that the decay rate of friction damped oscillations is not exponential, their logarithmic decrement is variable, therefore the parameters of the equivalent viscous damping depend on the equivalence criterion.
Thanks to its simplicity, widely used procedures to determine the damping coefficient are based on the measurement of the period of damped oscillations or on the evaluation of the logarithmic decrement .
The damping ratio
can be thus calculated using Equation (71) or by the formula:
Following that procedure, the equivalence between friction and viscous damping has been established equalizing the logarithmic decrement of the viscous case and the apparent logarithmic decrement of the friction case determined over five oscillations, using the first Equation (68), accordingly deducing damping ratios and damping coefficients. The amplitude of the first oscillation has been assumed, in turn, or .
For the St. Mary’s tenor bell, assuming
and
, at the bell pivot, and
and
, at the clapper pivot, the equivalent damping ratios and the relative damping coefficient indicated in the last two columns of
Table 8 have been derived. As already said, the equivalence of the clapper has been derived assuming
.
The corresponding “equivalent” time histories of bell and clapper rotation are illustrated in
Figure 17a,b, respectively: dashed lines refer to friction cases, and continuous lines to viscous cases.
Looking at the figures, it is evident that, although first oscillations of friction and viscous curves are nearly coincident, over time friction decay tends to prevail.
Comparison of Large Damped Free Oscillations in Case I
Cases I.a and I.b have been studied also in damped conditions, adopting the damping equivalent parameters previously determined (
Table 8), assuming the initial values given by Equations (64) and (65).
The results are compared in
Figure 18 in terms of time histories of rotations, in
Figure 19 in terms of
curves, and in
Figure 20 in terms
curves.
Figure 18a,b shows the time histories of bell and clapper rotations derived in case I.a—bell ringing right—considering friction damping and viscous damping, respectively;
Figure 18c,d refer to the corresponding situations in case I.b−bell ringing wrong.
Figure 19a,b compares
curves in case I.a e I.b, respectively, while
Figure 19c,d compares the corresponding curves
. In these diagrams, curves pertaining to friction damping are in blue and curves pertaining to “5° equivalent” viscous damping are in red.
The diagrams demonstrate that equivalent viscous damping coefficients determined considering small oscillations cannot be adopted for large oscillations. In fact, the comparison of diagrams in
Figure 18 and
Figure 19 is a crystal-clear evidence that amplitude and period decrease more quickly for “5° equivalent” viscous damped oscillations than for friction damped oscillations.
The reason for the latter remark is that, as soon as the initial amplitude of the oscillations increases, viscous dissipation increases much more rapidly than friction dissipation. The observation can be further corroborated comparing the energy dissipation caused by friction or by viscosity in a group of cycles or in a given time interval.
Since energy dissipation is nothing else than the work done by the corresponding dissipative force, its calculation is not particularly difficult.
The energy dissipated by friction damping and the energy dissipated by “5° equivalent” viscous damping are compared in the diagrams of
Figure 20 and
Figure 21a.
In
Figure 20 the dissipated energies
are plotted as a function of the bell rotation,
, cycle by cycle:
Figure 20a refers to the small oscillation case considered to assess the equivalence,
Figure 20b to the case I.a.
To facilitate the reading, curves in
Figure 20b are parameterized considering different time intervals: the dashed magenta curve is the energy dissipated by friction in the time interval
, while the solid blue line is the energy dissipated by “5° equivalent” viscosity in the time interval
. Finally, the
curves obtained for case I.a are compared in
Figure 21a, in which solid line refers to “5° equivalent” viscosity and dashed line to friction.
Figure 20a clearly shows that, as expected, for 5° oscillations the energy dissipations due to friction or equivalent viscosity practically coincide, but
Figure 20b and
Figure 21a underline that using “5° equivalent” viscosity leads to huge overestimations of the dissipated energy. That confirms that the equivalence parameters between friction and viscous dissipation is sensibly dependent on the initial amplitude. This aspect is not surprising since the energy dissipation due to friction depends, apart from the oscillation amplitude, on the increase of the friction forces due to the increase of radial forces, while the energy dissipation due to viscosity depends, besides the oscillation amplitude, on the angular velocity.
Owing the fact that the mean modulus of the radial acceleration at the pivot
, which is
for
oscillations, becomes
for
oscillations, and that the mean angular velocity, which is
for
oscillations, becomes
for
oscillations, the energy dissipations in
oscillations can be roughly estimated, starting from the dissipation evaluated considering
oscillations. As the mean value of the dissipated energy for
oscillations is around
(
Figure 20a), the dissipation caused by friction in
oscillations, which is approximately
, results sensibly smaller than the energy dissipated by “5° equivalent” viscosity, which is around
It must be remarked that these values, although roughly estimated, satisfactorily fit the calculated values for the first cycles (
Figure 21a).
To conclude the analysis, the “171° equivalent” viscous damping parameters have also been determined, reported in
Table 9. These values, which are one order of magnitude lower than the ones determined for small oscillations (
Table 8), lead to the time−dissipated energy curve illustrated in
Figure 21b (solid line), substantially coinciding with the dashed curve regarding the friction case.
In addition, the entity of the dissipative forces can play an important role in discriminating the aptitude of the bell to ring right or wrong, as demonstrated by the St. Mary’s tenor bell behavior when large free oscillations are considered. In fact:
on the one hand, as long as dissipative forces are low, over the time the bell tends to maintain the initial ringing state (right or wrong) (see
Figure 18a,c),
on the other, if dissipative forces increase, the bell tends to switch, independently on the initial state, into a ringing wrong state, in which each cycle is characterized by a single instantaneous impact (see
Figure 18b,d).
8.3. Time Histories of Excitations at the Pivots in Case of Large Oscillations
Adopting the approach already described in
Section 8.1.2. for case II—undamped free oscillations with
, the time histories of the excitations at the bell and clapper pivots in case of full circle oscillations
have also been determined, considering undamped and friction damped oscillations. Recalling that the “equivalent” viscous damping case, whose parameters accord with
Table 9, leads to outcomes practically coinciding with the ones obtained for friction damping, this case has not been explicitly considered.
The time histories of the accelerations are compared in
Figure 22, where solid lines refer to the undamped situation and dashed lines to the damped situation.
In analogy with
Figure 16,
Figure 22a,b refers to horizontal components
and
, while
Figure 22c,d refers to vertical components
and
. The diagrams show that the apparent period of damped large oscillations decreases over time, as a consequence of the reduction of the amplitude of the oscillations, which largely compensates the small increase due to the (low) damping considered in the present case. Obviously, this aspect is particularly relevant not only for the assessment of the bell behavior but also for the evaluation of the actions to be considered dealing with bell-structure interactions.
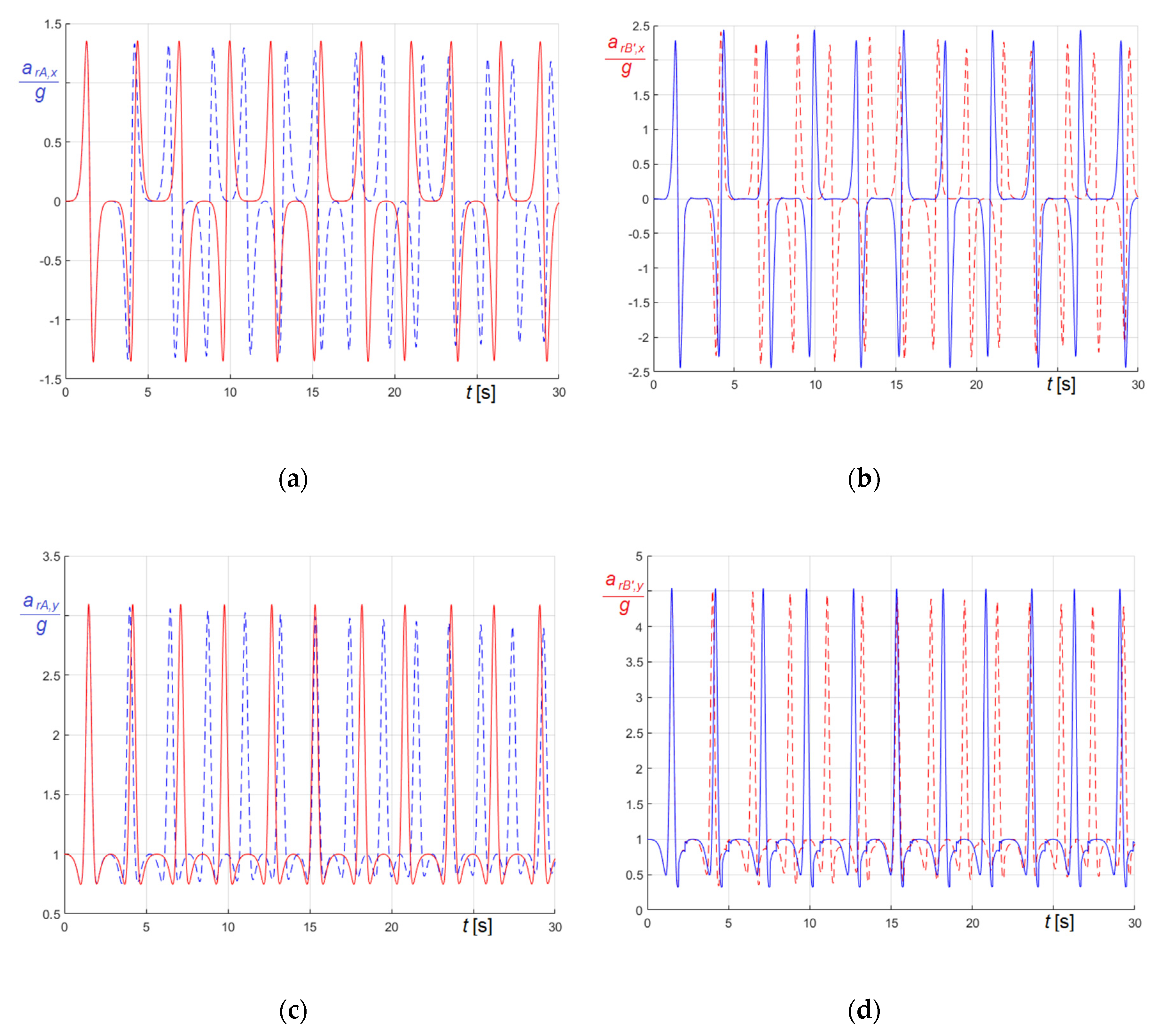
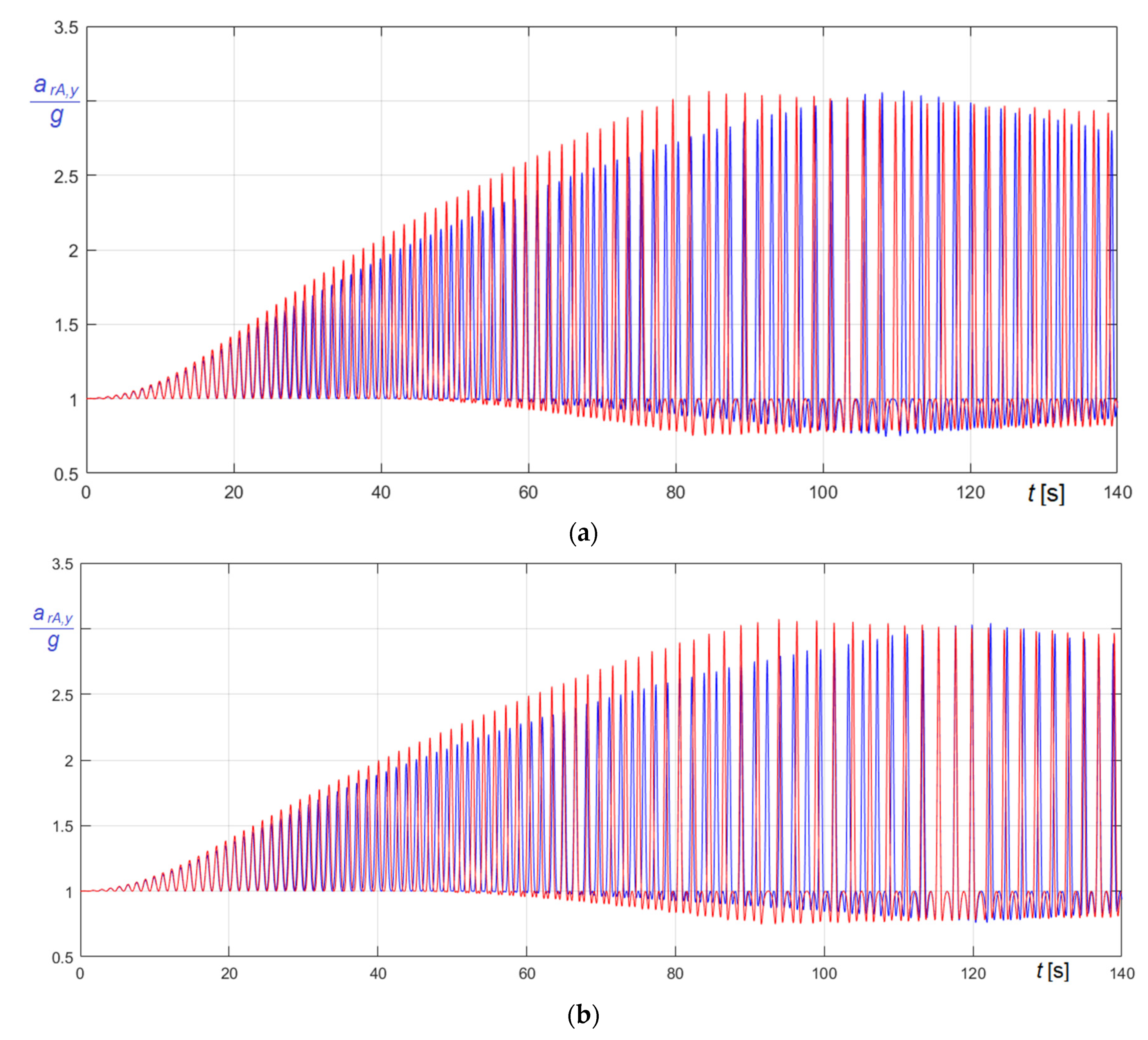
8.4. Synchronized Resonant Forced Oscillations of the Bell in Transient Phase
As known, manual excitation of a ringing bell in the starting phase is a typical example of resonance, where the forcing frequency is suitably tuned by the bell player in such a way that it is constantly synchronized with the natural frequency of the bell, which decreases as the oscillation amplitude increases. From the mathematical point of view, modelling this operation is not trivial, due to the complexity of the relationship between the natural frequency of the oscillations, their amplitude, the damping parameters, and their variations over time. For that reason, the study of this relevant transient phase is often disregarded or drastically simplified, for example considering easy to handle periodic forcing functions.
Dealing with forced oscillations, external forces are usually modeled by means of cosinusoidal functions of the time, so opening the door for easier analytical treatment. A similar approach is often adopted also in numerical integration of the equations of motion, especially when the solution is achieved via standard built-in numerical algorithms. Obviously, if the problem involves resonance aspects, the frequency of the forcing cosinusoidal function should be continuously modified to catch the actual natural frequency of the system, as a function of the oscillation amplitude. That approach is often worthless since it requires systematic human intervention to proceed with the solution. A common line of action is to consider forcing functions characterized by fixed frequency, suitably chosen in the range of natural frequencies associated with the expected range of oscillation amplitudes. Difficulties further increase considering external excitations described by arbitrary functions of the time, like, for example, the stepwise constant real excitations applied by bell ringers or by linear or rotating motors.
The proposed algorithms overcome all these issues. Really, they are able to successfully manage quite arbitrary excitations, and , of bell and clapper, also in case their dependence on time is not explicit. That important original feature easily allows to automatically synchronize the excitation with the varying instantaneous natural frequency of the system, reproducing persistently resonant conditions and, consequently, minimizing the peaks of the excitation.
A possible workaround is considering torques explicitly depending only on the rotations, so that the dependence on is implicitly expressed through and or and . It is worthwhile to remark that, even if the focus of the study is bell excitation, the approach is much more general, and it is not subject to special limitations.
Moreover, in defining the forcing function it should considered that, depending on the arrangement, external torque can be unidirectional or bidirectional, like in the case handstroke and backstroke consent to swing the bell through a full circle.
To assess the potentiality of the method, it has been studied the transient situation corresponding to the time interval needed to achieve the bell working position, starting from the rest condition. In the simulation, once achieved the bell working position, , the excitation has been switched off, so subsequently leaving the bell free to oscillate.
Four cases have been analyzed, characterized by two different forcing functions and by undamped or damped oscillations. In all cases, the following initial conditions have been assumed:
which correspond to an initial small rotation of the bell, with the clapper in vertical position.
Aiming to reproduce a manual excitation, it has been adopted a piecewise-constant bidirectional forcing function, which is the more realistic one:
or a truncated sinusoidal bidirectional forcing function:
It must be remarked that the peak modulus of and , , matching the torque easily exerted by a person, is significantly smaller than the peak of the torque needed to lift statically the St. Mary’s tenor bell in the upward position, .
Since “equivalent” viscous parameters strongly depend on the amplitude of the oscillations, the damped case refers to friction damping. Friction coefficients and pivot radii are those already recalled in
Table 8 and
Table 9, leading to very low level of damping, corresponding to a damping ratio
.
Relevant curves obtained in the undamped and in the friction damped case are compared in
Figure 23,
Figure 24 and
Figure 25. In the figures, panel (
a) refers to
(Equation (74)), and panel (
b) to
(Equation (75)); curves referring to undamped case are generally in blue and curves referring to damped case are generally in red, except
curves in
Figure 23, whose colors are opposites.
Looking at the time histories of the rotations of bell and clapper (
Figure 23), it results that:
in the undamped case, the time needed to reach the maximum amplitude, , i.e., the time during which the bell is driven, is , when the forcing function is , increasing to , when the forcing function is ,
in the friction damped case, the time needed to reach the maximum amplitude is , when the forcing function is , increasing to , when the forcing function is ,
also considering the transient phase, and without stopping it in the upward position before the free oscillation phase, the bell tends to ring wrong in all considered cases.
Further information can be derived from the time histories of the horizontal and of the vertical component of the acceleration at the bell pivot
, illustrated in
Figure 24 and
Figure 25, respectively.
Considering forced oscillations, the comparison of the diagrams obviously confirms that the number of oscillations needed to reach a given state in the transient phase is bigger in damped conditions than in undamped conditions.
Anyhow, it is interesting to remark that the amplitude and the period of these forced damped oscillations are generally smaller than those pertaining to forced undamped oscillations, even if, clearly, as already anticipated, the apparent period of a given large oscillation is higher in damped condition.
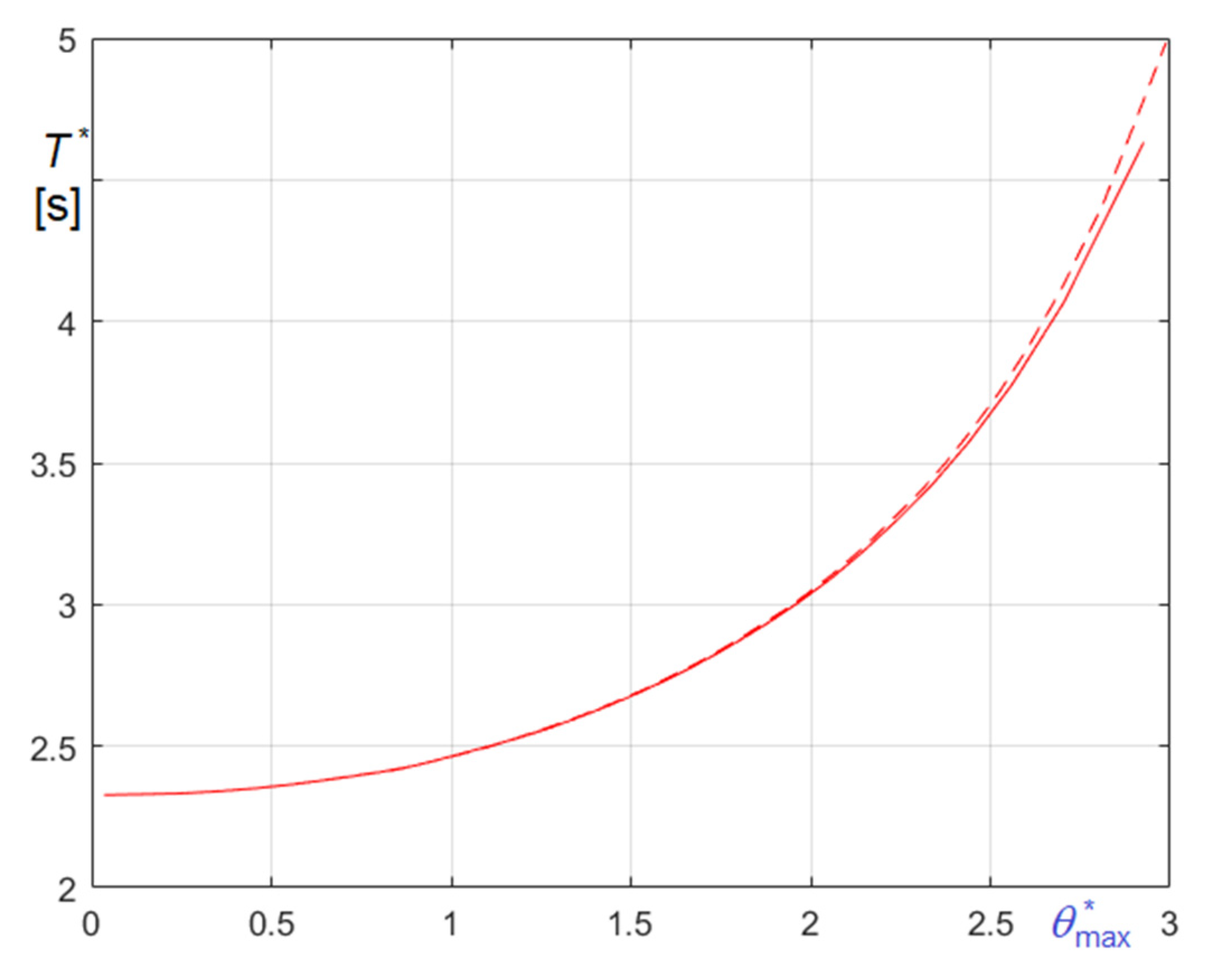
The latter observation is diagrammatically illustrated in
Figure 26, where, referring to the present case study, the apparent periods
of the forced resonant oscillations are plotted as a function of the maximum amplitude of the oscillations themselves
. In the diagram, dashed line represents the damped case, solid line the undamped case. Evidently, due to the low damping ratio characterizing the case study, the increase of the period due to damping is significant only when the oscillation amplitude is large.
Finally, adopting a representation in line with that adopted for
Figure 23,
Figure 24 and
Figure 25, in
Figure 27 they are illustrated, as functions of the time, the resonant forcing functions resulting, in the considered cases, in damped and undamped conditions.
Obviously,
Figure 27a refers to
(Equation (74)),
Figure 27b to
(Equation (75)). The graphs clearly demonstrate that the period of the forcing frequency is automatically tuned on the period of the system, so certifying the capability of the proposed approach to simulate also constantly resonant excitations.
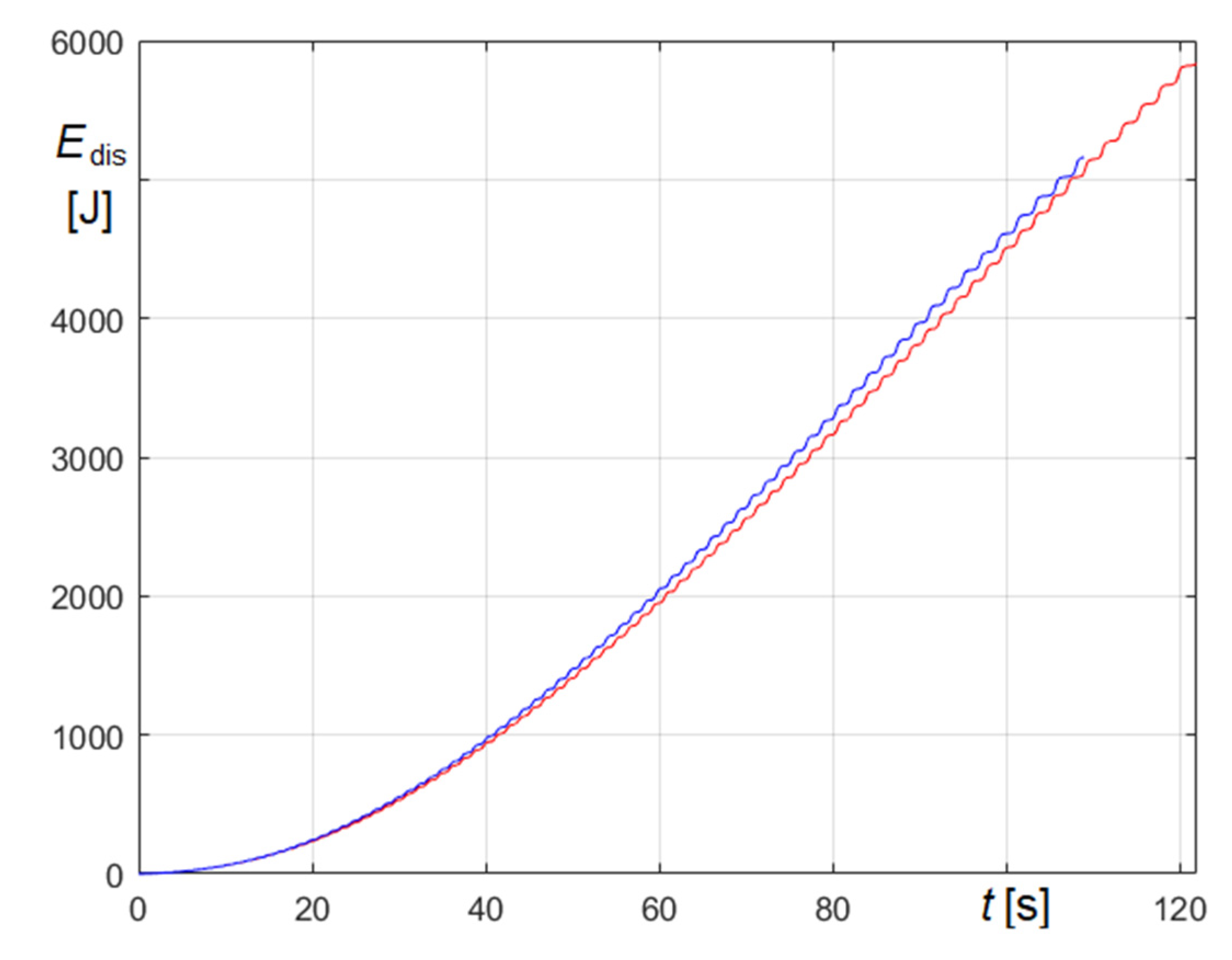
To complete the case study, the energy dissipated in the transient phase of forced damped oscillations are represented as a function of the time in
Figure 28. In the figure, the blue line refers to
and the red line to
. The total energy dissipated to attain the maximum amplitude results
, if the forcing function is
, increasing to
, if the forcing function is
, so indicating that, as expected,
excitation is more efficient.
Evidently, the duration of the transient phase depends on shape and intensity of the forcing excitation, as well as on the initial conditions, but the proposed algorithms are not sensitive on it. In fact, as already remarked at the end of
Section 6, the procedure can be repeated as many times as necessary, duly modifying the initial condition, until the wanted final condition is achieved.
9. Conclusions
Study of swinging bells involves topical arguments of structural and mechanical engineering as well as sound and acoustic engineering.
The research focuses, first, on the system of two nonlinear second order ODEs governing the problem. That system is derived under very general hypotheses, considering viscous damping, friction damping, and arbitrary excitations. Dissipative forces are treated like external forces interpreting the equation of motion of bell and clapper as dynamic equilibrium equations, in the spirit of Newtonian mechanics.
In the study, besides viscous forces proportional to the angular velocities, friction forces at the bell and clapper pivots are introduced as well. In that novel perspective, friction forces, commonly disregarded in the traditional approach, are realistically expressed as a function of the time dependent reactive radial forces at the pivots.
Clapper strokes are modelled as instantaneous impacts, resorting to the kinematic definition of the coefficient of restitution, which allows a synthetic, and experimentally measurable, quantification of the complex interdependency between the relevant parameters governing the impact. The suitable application of the law of conservation of the angular momentum provides the bell and clapper angular velocities at the end of the impact, which can be easily modified to consider also the acoustic energy leaving the system. Moreover, to preserve the physical coherence avoiding paradoxical results, the upper bound of the coefficient of restitution, corresponding to perfectly elastic impact, is suitably derived.
In the relevant literature about classical bell dynamics, the focus is alternatively concentrated on the bell-clapper interactions or on the bell-tower excitation. Whatever the problem, analytical solutions are available in a limited number of cases, therefore the governing ODEs are usually solved using numerical methods. The most frequently used numerical approaches rely on standard built-in algorithms, available in advanced software packages. Since adoption of these general algorithms is subject to some restrictions and often requires some additional manipulation of the equations, especially regarding the forcing functions, the significance of the outcomes derived in that way is limited. Moreover, the piecewise-defined structure of the solution makes the use of these classical methods even more complex.
In the paper an innovative procedure to solve the equations of motions of bell and clapper is discussed.
The novelty of the proposed method, which is described in
Section 6, is an original numerical explicit-implicit predictor-corrector integration scheme with constant time step, implemented in two different slightly different versions, depending on the correction phase regards only the rotations or the angular velocities and the angular accelerations as well. The implementation is such that each time the clapper strikes the bell a new “piece” of the solution is automatically initialized, consequently user interventions in the elaboration phase are not necessary.
In addition, the structure of the algorithm allows to analyze arbitrarily long transient and stationary time intervals, until the required final situation is achieved, provided that the total time to be analyzed is divided in suitable subintervals. Evidently, the duration of each subinterval should be chosen according the available physical memory of the computer hardware, while the initial conditions of the system in each subinterval are obtained duly recalling the final conditions of the system at the end of the preceding subinterval.
These extremely fast and effective algorithms, which have been validated in
Section 7 reproducing relevant theoretical, numerical, and experimental outcomes, allow one to successfully handle, independently on the oscillation amplitude: undamped oscillations; friction and viscosity damped oscillations; free oscillations; forced oscillations; transient and stationary phases, and are also suitable to solve stiff equations.
The method has been applied in
Section 8 to study the oscillations of a relevant bell, the Great St. Mary’s old tenor bell in Cambridge, hypothesizing several distinct operational conditions, also highlighting that the definition of damping equivalence requires nontrivial considerations.
The critical examination of the outcomes of the analyses demonstrates the potentialities of the method highlighting some original key issues, like its capability to handle arbitrary forcing functions.
A particularly significant and pioneering feature of the algorithms is their ability both to manage and to define “resonant” forcing functions, continuously tuned on the actual frequency of the oscillation, which depends on the amplitude of the oscillation itself. Outstanding examples of resonant forcing functions are, for example, the excitations that bell ringers apply on manually driven bells.
It must be stressed that the approach is absolutely general and can be applied independently on the adopted ringing style; as well as on dimensions, shape, and mechanical properties of bell and clapper.
Further refinements, especially regarding other sources of dissipation; linear and nonlinear external elastic restraints; and interaction with the supporting structures can be envisaged, which will be the subject of future studies.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}