Evaluation of Combined Satellite and Radar Data Assimilation with POD-4DEnVar Method on Rainfall Forecast


Abstract
1. Introduction
2. Assimilation Method and Experiment Configuration
2.1. POD-4DEnVar Algorithm
2.2. Component of the Assimilation System
2.3. Construction of Four-Dimension Ensemble Samples
2.4. Satellite and Radar Data Assimilation Scheme
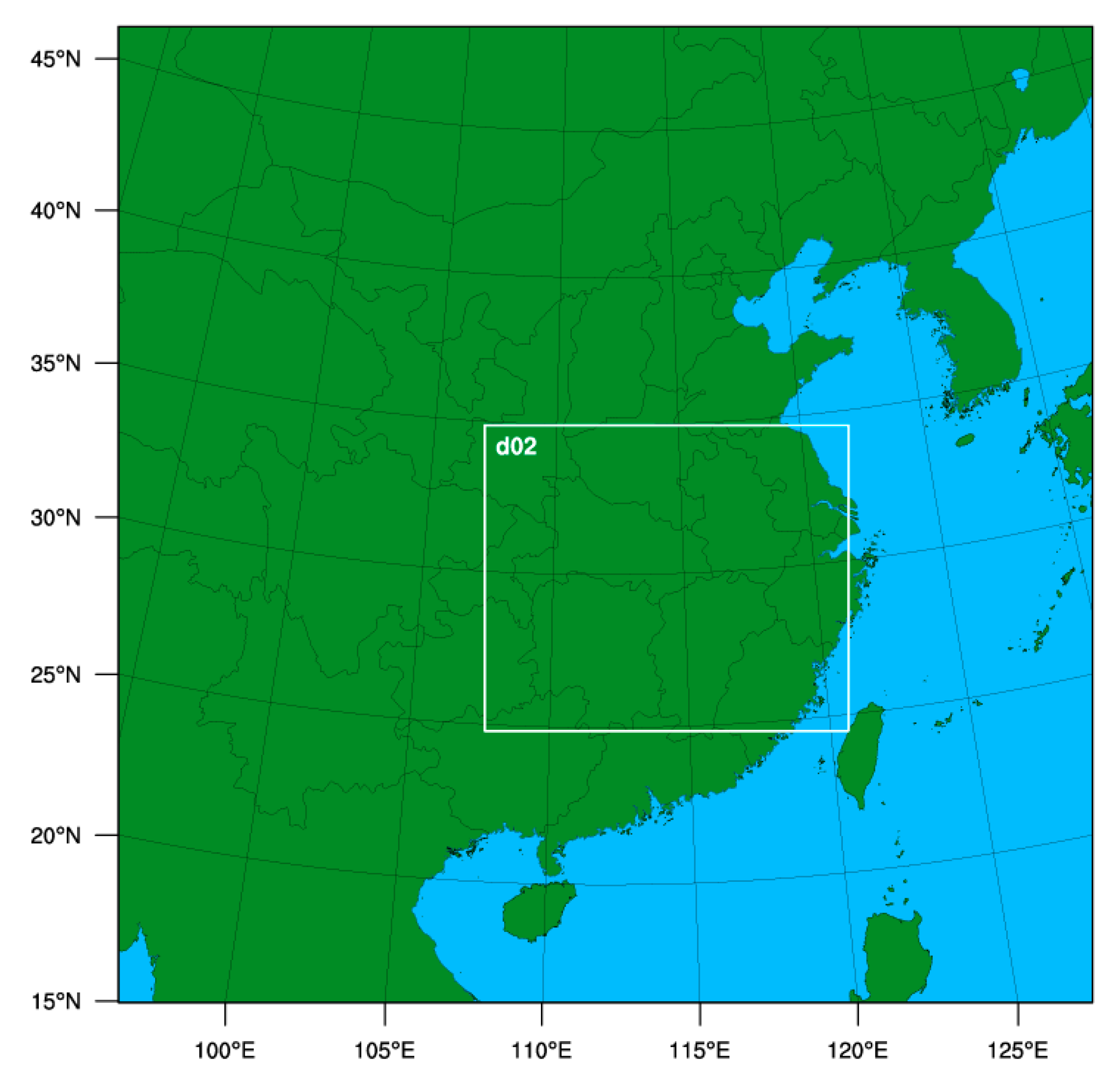
2.5. Experiment Configuration
3. Results
3.1. Evaluation of the Assimilation System
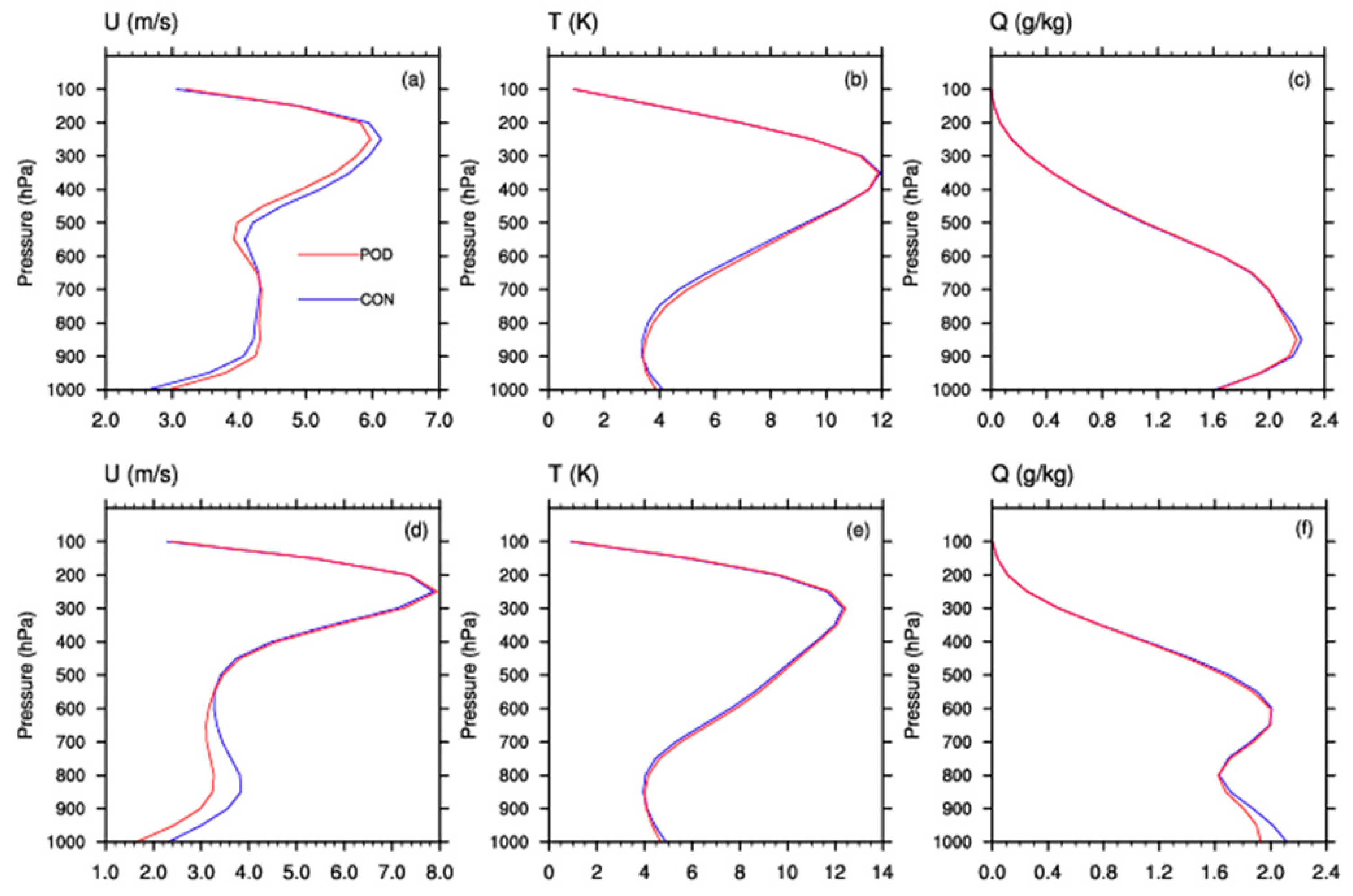
3.1.1. Comparison of Forecast Field
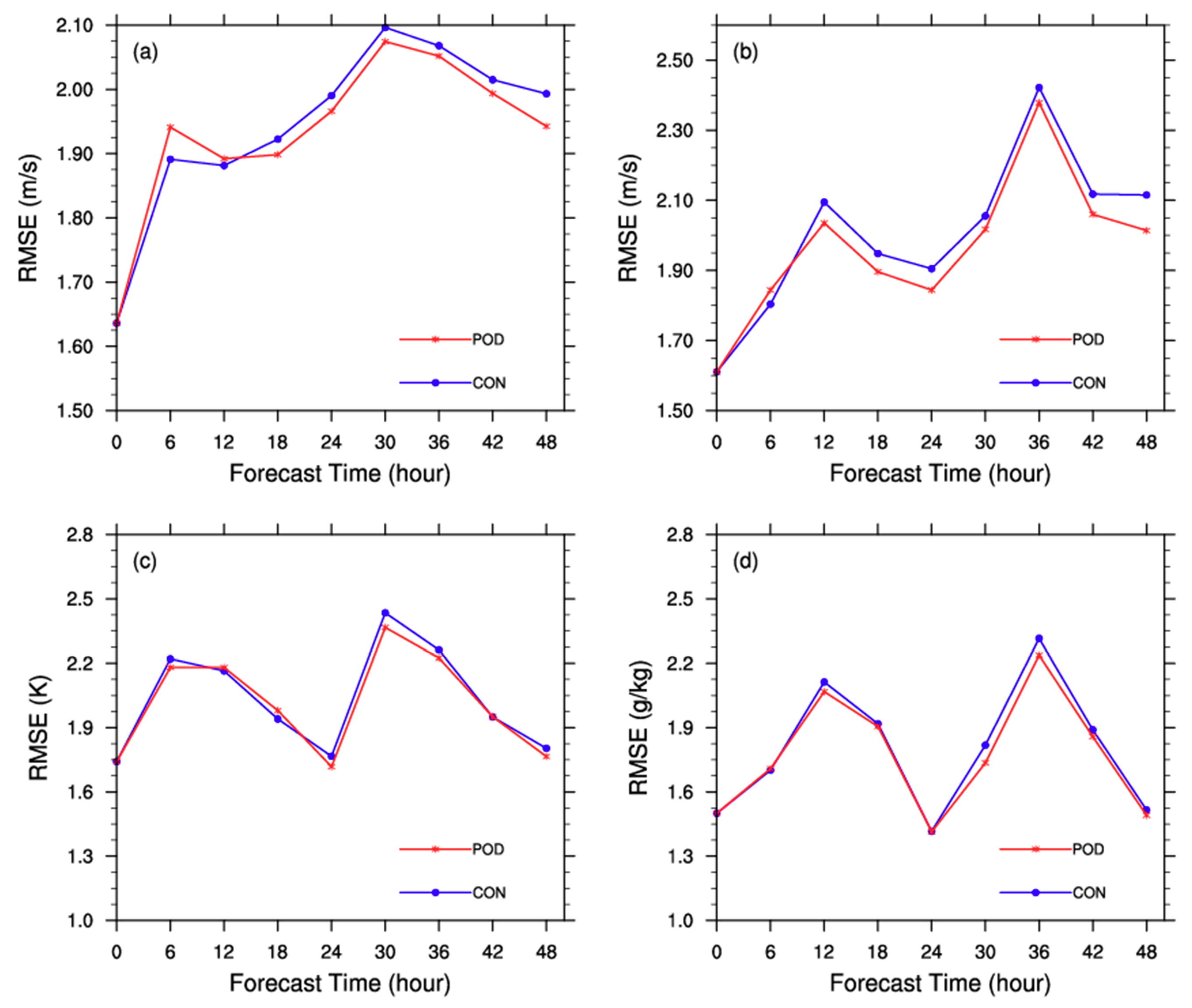
3.1.2. Quantitative Evaluation of Rainfall Forecasts
3.2. A Rainstorm Forecast Result Analysis
3.2.1. Accumulated Rainfall Evolution
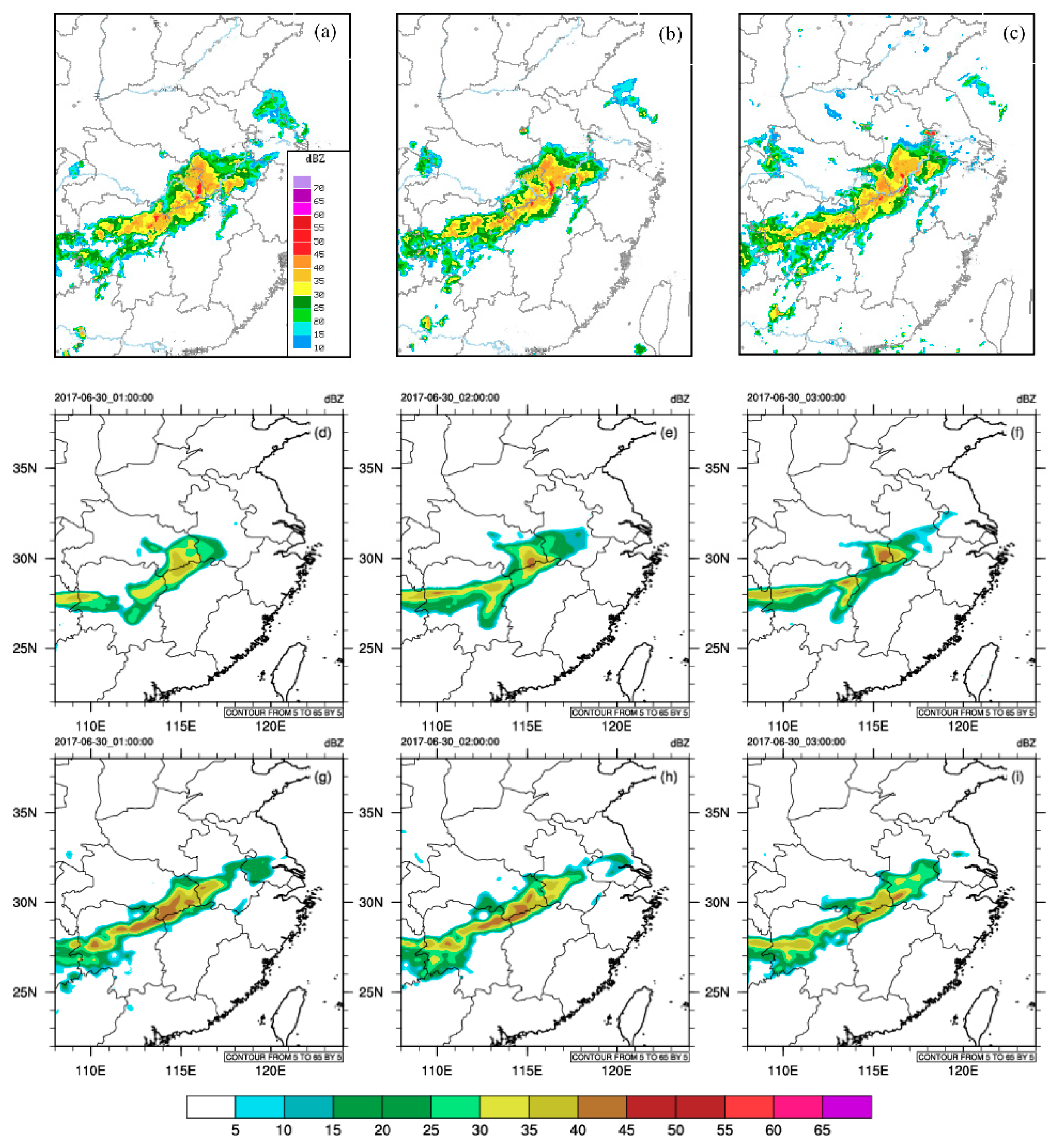
3.2.2. Radar Reflectivity Simulation
3.2.3. Effects of Assimilation on Initial Field
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Courtier, P.; Thepaut, J.N.; Hollingsworth, A. A strategy for operational implementation of 4DVar using an incremental approach. Q. J. R. Meteorol. Soc. 1994, 120, 1367–1387. [Google Scholar] [CrossRef]
- Lorenc, A.C. The potential of the ensemble Kalman filter for NWP—A comparison with 4D-VAR. Q. J. R. Meteorol. Soc. 2003, 129, 3183–3203. [Google Scholar] [CrossRef]
- Zhang, F.; Weng, Y.; Sippel, J.A.; Meng, Z.; Bishop, C.H. Cloud-resolving hurricane initialization and prediction through assimilation of Doppler radar observations with an ensemble Kalman filter. Mon. Weather Rev. 2009, 137, 2105–2125. [Google Scholar] [CrossRef]
- Qiu, C.; Chou, J. Four-dimensional data assimilation method based on SVD: Theoretical aspect. Theor. Appl. Climatol. 2006, 83, 51–57. [Google Scholar] [CrossRef]
- Tian, X.; Xie, Z.; Dai, A. An ensemble-based explicit four-dimensional variational assimilation method. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Wang, S.; Cheng, W.; Juan, L.; Liu, C.; Xiao, Q.; Kuo, Y.H. An economical approach to four-dimensional variational data assimilation. Adv. Atmos. Sci. 2010, 27, 715–727. [Google Scholar] [CrossRef]
- Tian, X.; Xie, Z.; Sun, Q. A POD-based ensemble four-dimensional variational assimilation. Tellus Ser. A Dyn. Meteorol. Oceanol. 2011, 63, 805–816. [Google Scholar] [CrossRef]
- Tian, X.; Xie, Z.; Dai, A.; Shi, C.; Jia, B.; Chen, F.; Yang, K. A dual-pass variational data assimilation framework for estimating soil moisture profiles from AMSR-E microwave brightness temperature. J. Geophys. Res. Atmos. 2009, 114, D16102. [Google Scholar] [CrossRef]
- Tian, X.; Xie, Z.; Dai, A.; Jia, B.; Shi, C. A microwave land data assimilation system: Scheme and preliminary evaluation over China. J. Geophys. Res. Atmos. 2010, 115, D21113. [Google Scholar] [CrossRef]
- Houtekamer, P.L.; Mitchell, H.L.; Pellerin, G.; Buehner, M.; Charron, M.; Spacek, L.; Hansen, B. Atmospheric data assimilation with an ensemble Kalman filter: Results with real observations. Mon. Weather Rev. 2005, 133, 604–620. [Google Scholar] [CrossRef]
- Chen, Y.; Snyder, C. Assimilating vortex position with an ensemble Kalman filter. Mon. Weather Rev. 2007, 135, 1828–1845. [Google Scholar] [CrossRef]
- Chen, S.H.; Vandenberghe, F.; Petty, G.W.; Bresch, J.F. Application of SSM/I satellite data to a hurricane simulation. Q. J. R. Meteorol. Soc. 2010, 130, 801–825. [Google Scholar] [CrossRef][Green Version]
- Buehner, M.; Houtekamer, P.L.; Charette, C.; Mitchell, H.L.; He, B. Intercomparison of variational data assimilation and the ensemble Kalman filter for global deterministic NWP. Part II: One-month experiments with real observations. Mon. Weather Rev. 2010, 138, 1567–1586. [Google Scholar] [CrossRef]
- Hamill, T.M.; Whitaker, J.S.; Fiorino, M.; Benjamin, S.G. Global ensemble predictions of 2009’s tropical cyclones initialized with an ensemble Kalman filter. Mon. Weather Rev. 2011, 139, 668–688. [Google Scholar] [CrossRef]
- Liu, Z.; Schwartz, C.S.; Snyder, C.; Ha, S.Y. Impact of assimilating AMSU-A radiances on forecasts of 2008 Atlantic tropical cyclones initialized with a limited-area ensemble Kalman filter. Mon. Weather Rev. 2012, 140, 4017–4034. [Google Scholar] [CrossRef]
- Zou, X.; Qin, Z.; Weng, F. Improved quantitative precipitation forecasts by MHS radiance data assimilation with a newly added cloud detection algorithm. Mon. Weather Rev. 2013, 141, 3203–3221. [Google Scholar] [CrossRef]
- Sun, J.; Crook, N.A. Dynamical and microphysical retrieval from Doppler radar observations using a cloud model and its adjoint: Part I. Model development and simulated data experiments. J. Atmos. Sci. 1997, 54, 1642–1661. [Google Scholar] [CrossRef]
- Sun, J.; Crook, N.A. Dynamical and microphysical retrieval from Doppler radar observations using a cloud model and its adjoint: Part II. Retrieval experiments of an observed Florida convective storm. J. Atmos. Sci. 1998, 55, 835–852. [Google Scholar] [CrossRef]
- Gao, J.; Xue, M.; Brewster, K.; Droegemeier, K.K. Droegemeier. A three-dimensional variational data assimilation method with recursive filter for single-Doppler radar. J. Atmos. Ocean. Technol. 2004, 21, 457–469. [Google Scholar] [CrossRef]
- Aksoy, A.; Dowell, D.C.; Snyder, C. A multicase comparative assessment of the ensemble Kalman Filter for assimilation of radar observations. Part I: Storm-scale analyses. Mon. Weather Rev. 2009, 137, 1805–1824. [Google Scholar] [CrossRef]
- Gao, J.; Stensrud, D.J. Assimilation of reflectivity data in a convective-scale, cycled 3DVAR framework with hydrometeor classification. J. Atmos. Sci. 2012, 69, 1054–1065. [Google Scholar] [CrossRef]
- Wang, H.; Sun, J.; Zhang, X.; Huang, X.; Auligne’, T. Radar data assimilation with WRF 4D-Var. Part I: System development and preliminary testing. Mon. Weather Rev. 2013, 141, 2224–2244. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, L.; Zhang, B.; Guan, J.; You, W. Assimilation of MWHS and MWTS radiance data from the FY-3A satellite with the POD-3DEnVar method for forecasting heavy rainfall. Atmos. Res. 2018, 219, 95–105. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, L.; Zhang, B. FY-3A Microwave Data Assimilation Based on the POD-4DEnVar Method. Atmosphere 2019, 9, 189. [Google Scholar] [CrossRef]
- Pan, X.; Tian, X.; Li, X.; Xie, Z.; Shao, A.; Lu, C. Assimilating Doppler radar radial velocity and reflectivity observations in the weather research and forecasting model by a proper orthogonal decomposition based ensemble three-dimensional variational assimilation method. J. Geophys. Res. Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Zhang, B.; Tian, X.; Sun, J.; Chen, F.; Zhang, Y.; Zhang, L.; Fu, S. PODEn4DVar-based radar data assimilation scheme: Formulation and preliminary results from real-data experiments with Advanced Research WRF (ARW). Tellus Ser. A Dyn. Meteorol. Oceanol. 2015, 67, 26045. [Google Scholar] [CrossRef]
- Jones, T.A.; Otkin, J.A.; Stensrud, D.J.; Knopfmeier, K. Assimilation of satellite infrared radiances and Doppler radar observations during a cool season observing system simulation experiment. Mon. Weather Rev. 2013, 141, 3273–3299. [Google Scholar] [CrossRef]
- Pan, S.; Gao, J.; Stensrud, D.J.; Wang, X.; Jones, T.A. Assimilation of Radar Radial Velocity and Reflectivity, Satellite Cloud Water Path, and Total Precipitable Water for Convective-Scale NWP in OSSEs. J. Atmos. Ocean. Technol. 2018, 35, 60–89. [Google Scholar] [CrossRef]
- Zhang, Y.; Stensrud, D.J.; Zhang, F. Simultaneous Assimilation of Radar and All-Sky Satellite Infrared Radiance Observations for Convection-Allowing Ensemble Analysis and Prediction of Severe Thunderstorms. Mon. Weather Rev. 2019, 147, 4389–4409. [Google Scholar] [CrossRef]
- Han, Y.; van Delst, P.; Liu, Q.; Weng, F.; Yan, B.; Han, Y. JCSDA Community radiative Transfer Model (CRTM)-Version 1. NOAA Tech. Rep. NESDIS. 2006, 122, 33. [Google Scholar]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A Method that Produces Global Precipitation Estimates from Passive Microwave and Infrared Data at High Spatial and Temporal Resolution. J. Hydrometeor. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Wernli, H.; Paulat, M.; Hagen, M.; Frei, C. SAL—A Novel Quality Measure for the Verification of Quantitative Precipitation Forecasts. Mon. Weather Rev. 2008, 136, 4470–4487. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Min, J. Impact of Assimilating China Precipitation Analysis Data Merging with Remote Sensing Products Using the 4DVar Method on the Prediction of Heavy Rainfall. Remote Sens. 2019, 11, 973. [Google Scholar] [CrossRef]
- Ban, J.; Liu, Z.; Zhang, X.; Huang, X.; Wang, H. Precipitation data assimilation in WRFDA 4D-Var: Implementation and application to convection-permitting forecasts over United States. Tellus Ser. A Dyn. Meteorol. Oceanol. 2017, 69, 1368310. [Google Scholar] [CrossRef]
- Xie, Y.; Shi, J.; Fan, S.; Chen, M.; Dou, Y.; Ji, D. Impact of Radiance Data Assimilation on the Prediction of Heavy Rainfall in RMAPS: A Case Study. Remote Sens. 2018, 10, 1380. [Google Scholar] [CrossRef]
- Lee, J.W.; Min, K.H.; Lee, Y.H.; Lee, G. X-Net-Based Radar Data Assimilation Study over the Seoul Metropolitan Area. Remote Sens. 2020, 12, 893. [Google Scholar] [CrossRef]
- Bannister, R. A review of operational methods of variational and ensemble-varitional data assimilation. Q. J. R. Meteorol. Soc. 2017, 143, 607–633. [Google Scholar] [CrossRef]
- Wang, X.; Barker, D.; Chris Snyder, C.; Hamill, T. A Hybrid ETKF–3DVAR Data Assimilation Scheme for the WRF Model. Part I: Observing System Simulation Experiment. Mon. Weather Rev. 2008, 136, 5116–5131. [Google Scholar] [CrossRef]
- Wang, X.; Barker, D.; Chris Snyder, C.; Hamill, T. A Hybrid ETKF–3DVAR Data Assimilation Scheme for the WRF Model. Part II: Real Observation Experiments. Mon. Weather Rev. 2008, 136, 5132–5147. [Google Scholar] [CrossRef]
- Huang, X.; Xiao, Q.; Barker, D.M. Four-dimensional variational data assimilation for WRF: Formulation and pre-liminary results. Mon. Weather Rev. 2009, 137, 299–314. [Google Scholar] [CrossRef]
- Lopez, P. Cloud and precipitation parameterizations in modeling and variational data assimilation: A review. J. Atmos. Sci. 2007, 64, 3766–3784. [Google Scholar] [CrossRef]
- Zhang, S.; Zupanski, D.; Zupanski, M.; Hou, A.; Cheung, S. Assimilation of Precipitation-Affected Radiances in a Cloud-Resolving WRF Ensemble Data Assimilation System. Mon. Weather Rev. 2013, 141, 754–772. [Google Scholar] [CrossRef]
- Wang, X. Incorporating ensemble covariance in the Gridpoint Statistical Interpolation Variational Minimization: A Mathematical Framework. Mon. Weather Rev. 2010, 138, 2990–2995. [Google Scholar] [CrossRef]
- Campbell, W.F.; Bishop, C.H.; Hodyss, D. Vertical covariance localization for satellite radiances in ensemble Kalman filters. Mon. Weather Rev. 2010, 138, 282–290. [Google Scholar] [CrossRef]
- Kleist, D.T.; Parrish, D.F.; Derber, J.C.; Treadon, R.; Wu, W.S.; Lord, S. Introduction of the GSI into the NCEP Global Data Assimilation System. Weather Forecast. 2009, 24, 1691–1705. [Google Scholar] [CrossRef]
- Tong, M.; Xue, M. Ensemble Kalman filter assimilation of Doppler radar data with a compressible nonhydrostatic model: OSS experiments. Mon. Weather Rev. 2005, 133, 1789–1807. [Google Scholar] [CrossRef]
- Jones, T.A.; Otkin, J.A.; Stensrud, D.J.; Knopfmeier, K. Forecast Evaluation of an Observing System Simulation Experiment Assimilating Both Radar and Satellite Data. Mon. Weather Rev. 2014, 142, 107–124. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Y.; Ban, J.; Hong, J.S.; Lin, C.Y. Impact of Combined Assimilation of Radar and Rainfall Data on Short-Term Heavy Rainfall Prediction: A Case Study. Mon. Weather Rev. 2020, 148, 2211–2232. [Google Scholar] [CrossRef]
- Johnson, A.; Wang, X.; Carley, J.; Wicker, L.; Karstens, C. A Comparison of Multiscale GSI-Based EnKF and 3DVar Data Assimilation Using Radar and Conventional Observations for Midlatitude Convective-Scale Precipitation Forecasts. Mon. Weather Rev. 2015, 143, 3087–3108. [Google Scholar] [CrossRef]
- Geer, A.J.; Baordo, F.; Bormann, N.; English, S. All-Sky Assimilation of Microwave Humidity Sounders; European Centre for Medium-Range Weather Forecasts: Reading, UK, 2014; Volume 140, pp. 25–32. [Google Scholar]
- Zhu, Y.; Liu, E.H.; Mahajan, R.; Thomas, C.; Groff, D.; van Delst, P.; Collard, A. All-sky microwave radiance assimilation in the NCEP’s GSI analysis system. Mon. Weather Rev. 2016, 144, 4709–4735. [Google Scholar] [CrossRef]
- Geer, A.J.; Lonitz, K. All-sky satellite data assimilation at operational weather. Q. J. R. Meteorol. Soc. 2017, 144, 1191–1217. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microphysics | WSM 6-Class Graupel Scheme |
| Cumulus parameterization | Kain-Fritsch (new Eta) scheme (none in the inner domain) |
| Planetary boundary layer | YSU (Yonsei University) |
| Surface layer | Revised MM5 Monin-Obukhov scheme |
| Longwave radiation | Rapid Radiative Transfer Model for GCMs |
| Shortwave radiation | Dudhia scheme |
| Advantages | Variational Data Assimilation (3/4DVAR) | EnKF | POD-4DenVar |
|---|---|---|---|
| Benefit from the use of Flow-dependent B | √ | √ | |
| Better localization for satellite and radar observations [44] | √ | √ | |
| Easiness to add the dynamic constraint of variation [46] | √ | √ | |
| No need for linearized models [37] | √ | √ | |
| More use of existing capability in VAR | √ | √ |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhang, L.; Guan, J.; Zhang, M. Evaluation of Combined Satellite and Radar Data Assimilation with POD-4DEnVar Method on Rainfall Forecast. Appl. Sci. 2020, 10, 5493. https://doi.org/10.3390/app10165493
Wang J, Zhang L, Guan J, Zhang M. Evaluation of Combined Satellite and Radar Data Assimilation with POD-4DEnVar Method on Rainfall Forecast. Applied Sciences. 2020; 10(16):5493. https://doi.org/10.3390/app10165493
Chicago/Turabian StyleWang, Jingnan, Lifeng Zhang, Jiping Guan, and Mingyang Zhang. 2020. "Evaluation of Combined Satellite and Radar Data Assimilation with POD-4DEnVar Method on Rainfall Forecast" Applied Sciences 10, no. 16: 5493. https://doi.org/10.3390/app10165493
APA StyleWang, J., Zhang, L., Guan, J., & Zhang, M. (2020). Evaluation of Combined Satellite and Radar Data Assimilation with POD-4DEnVar Method on Rainfall Forecast. Applied Sciences, 10(16), 5493. https://doi.org/10.3390/app10165493