Coherence Enhancement Based on Recursive Anisotropic Scale-Space with Adaptive Kernels


Abstract
1. Introduction
2. Preliminary
3. Recursive Anisotropic Diffusion
| Algorithm 1: Recursive Anisotropic Diffusion Process |
 |
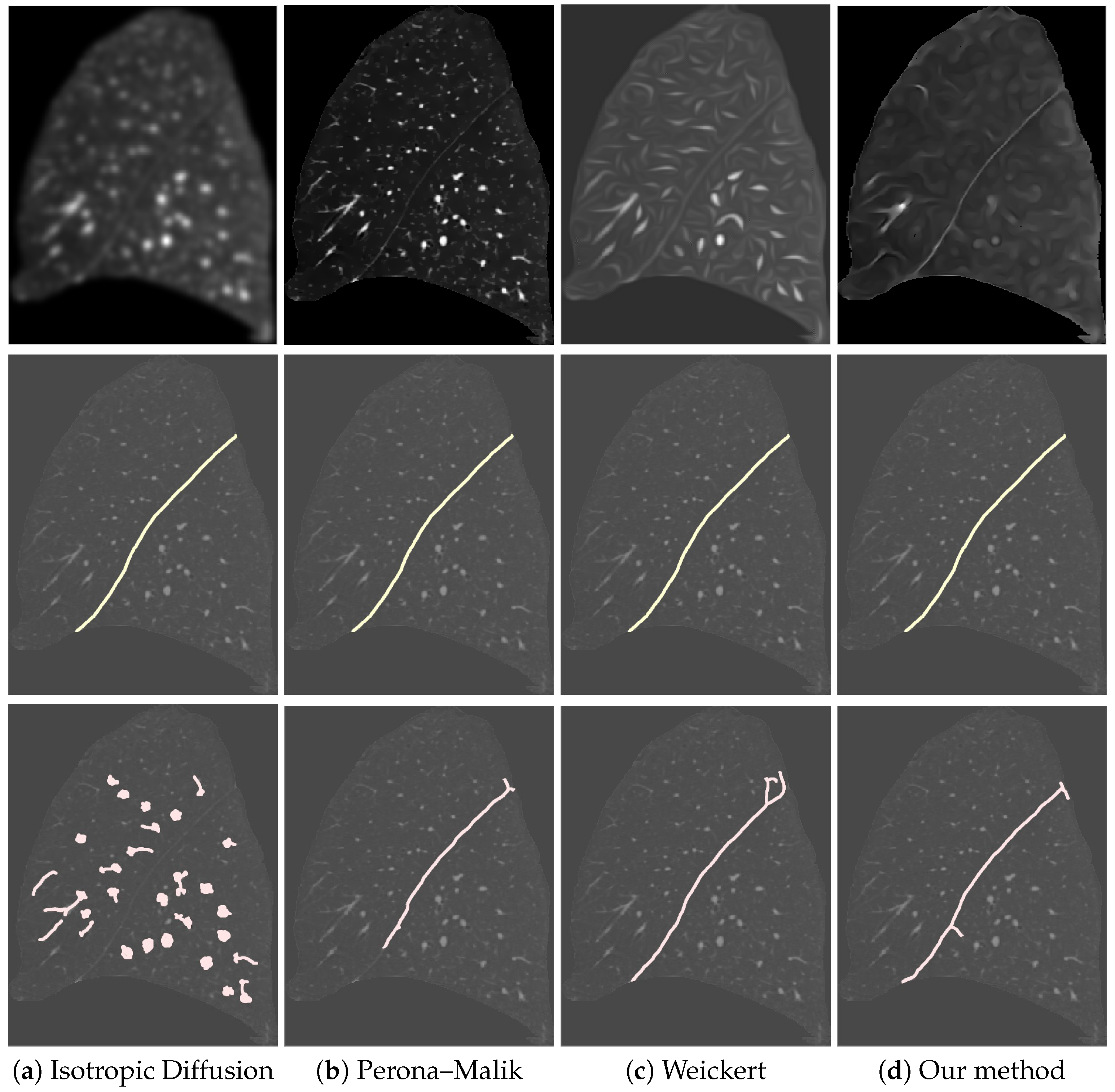
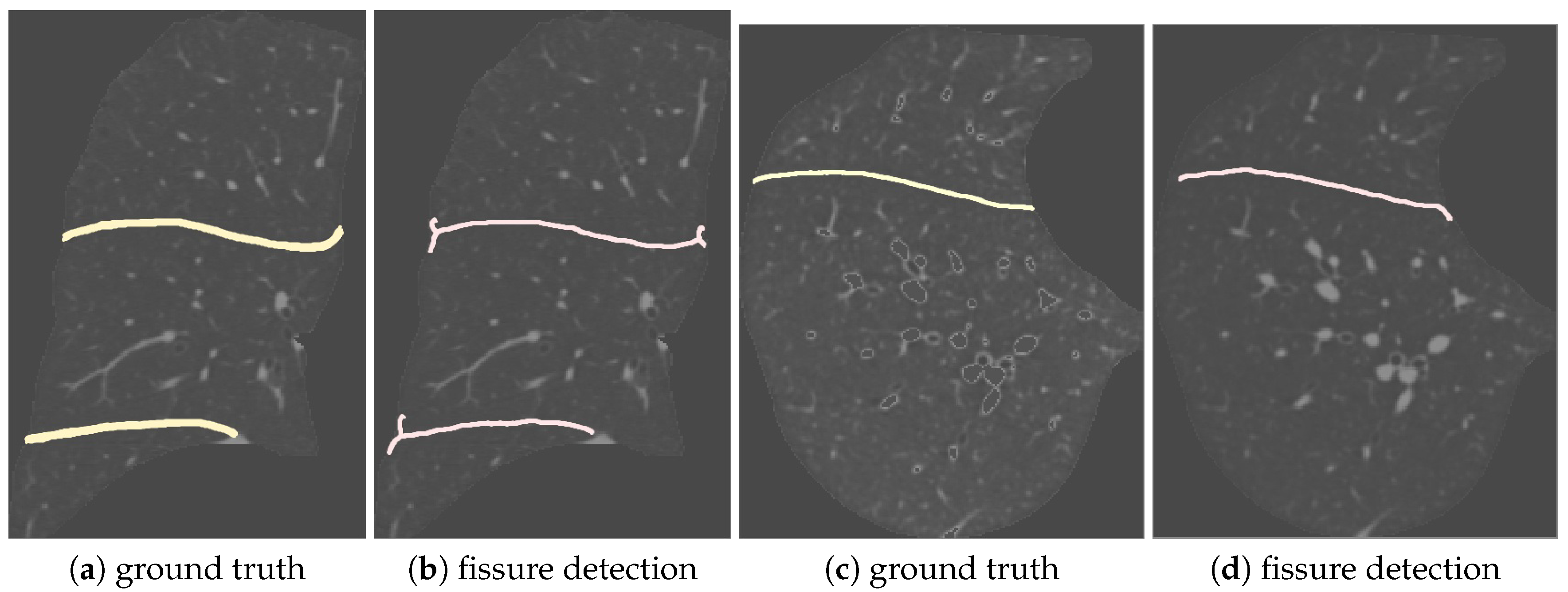
4. Detection of Curvilinear Structures
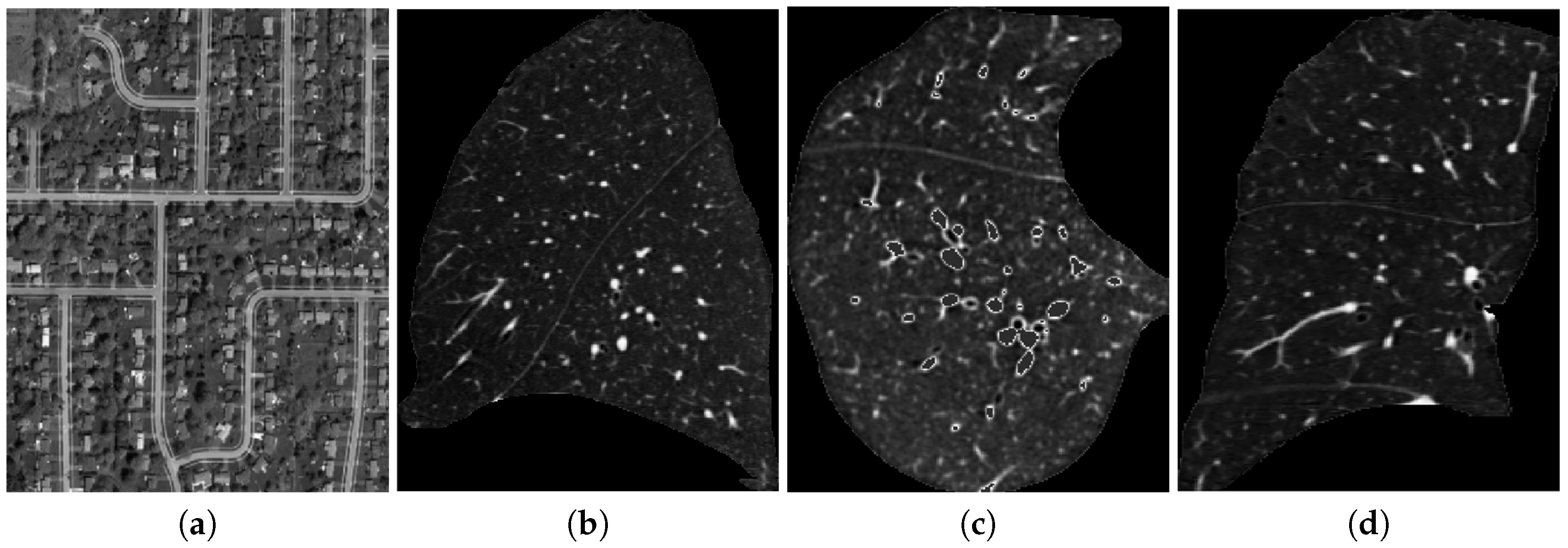
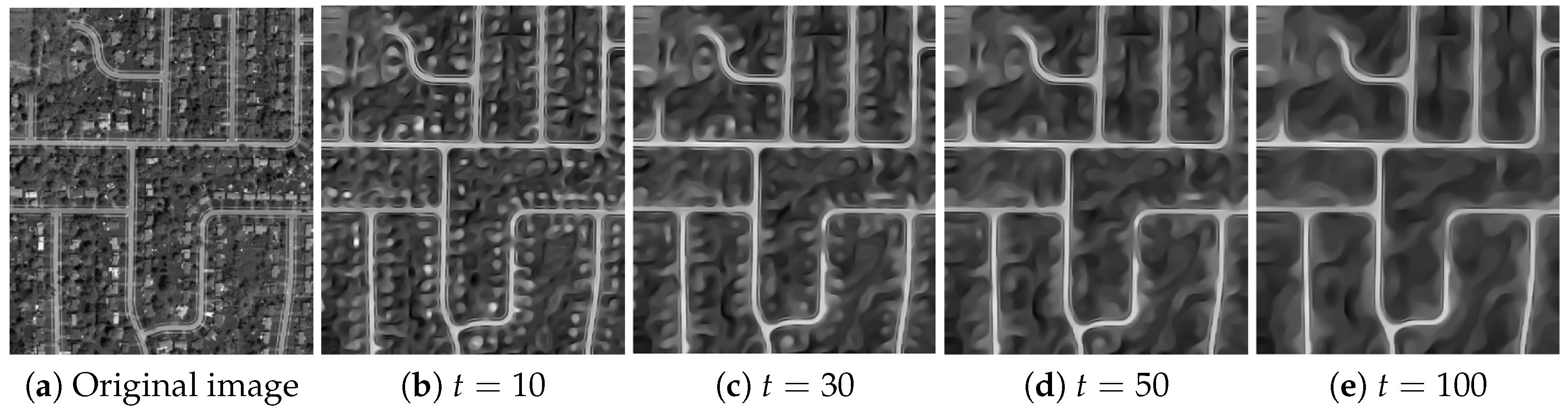
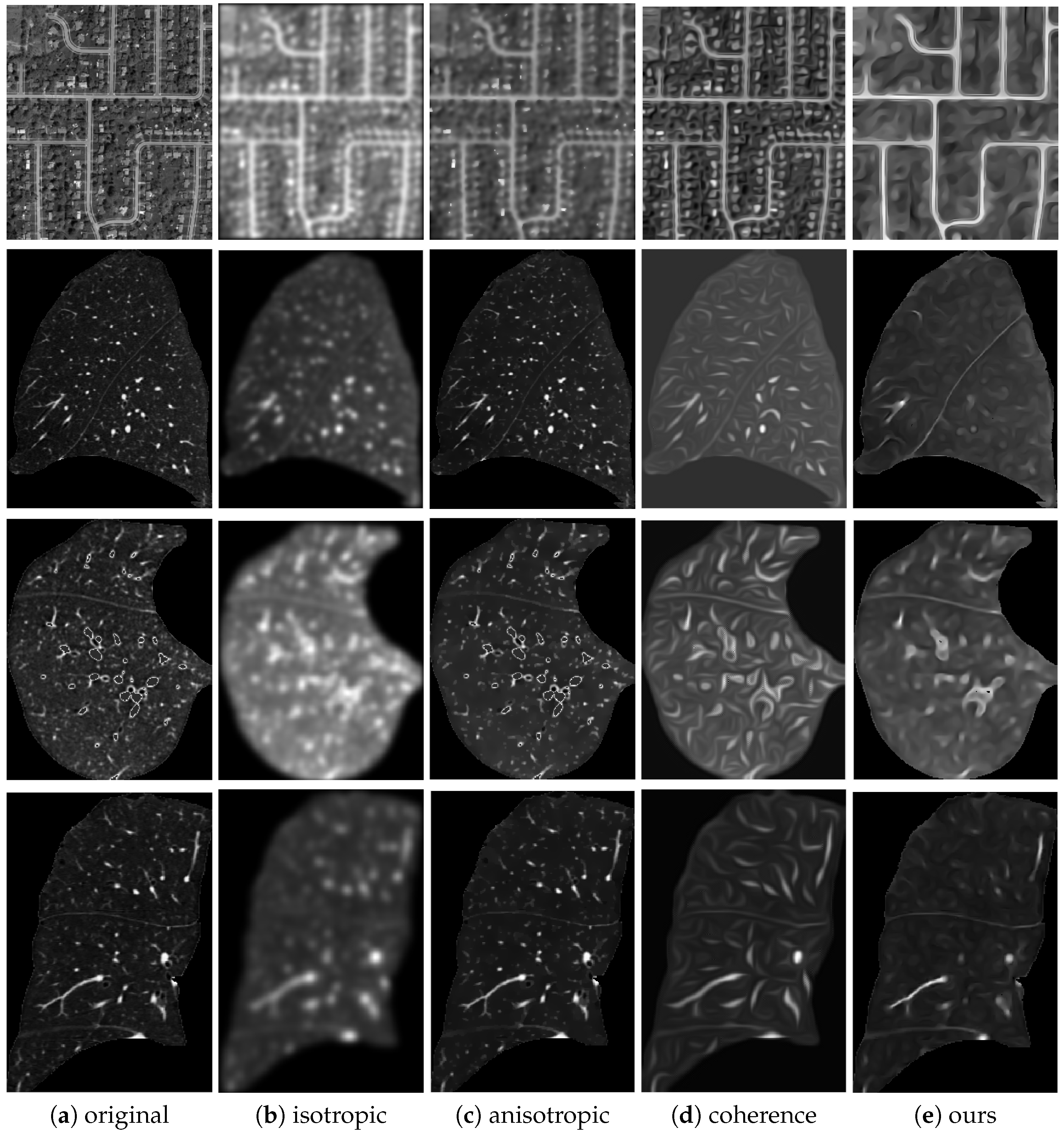
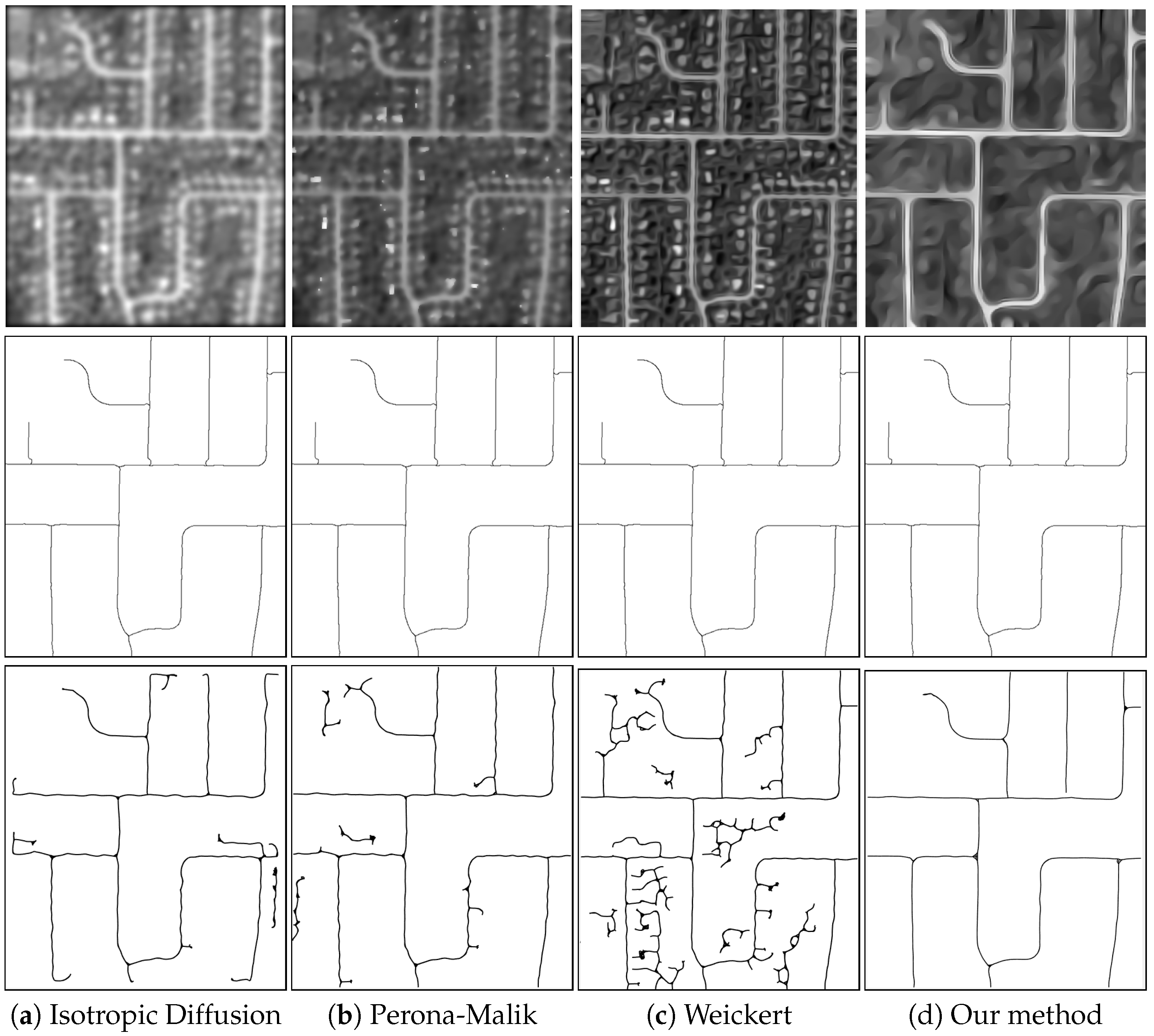
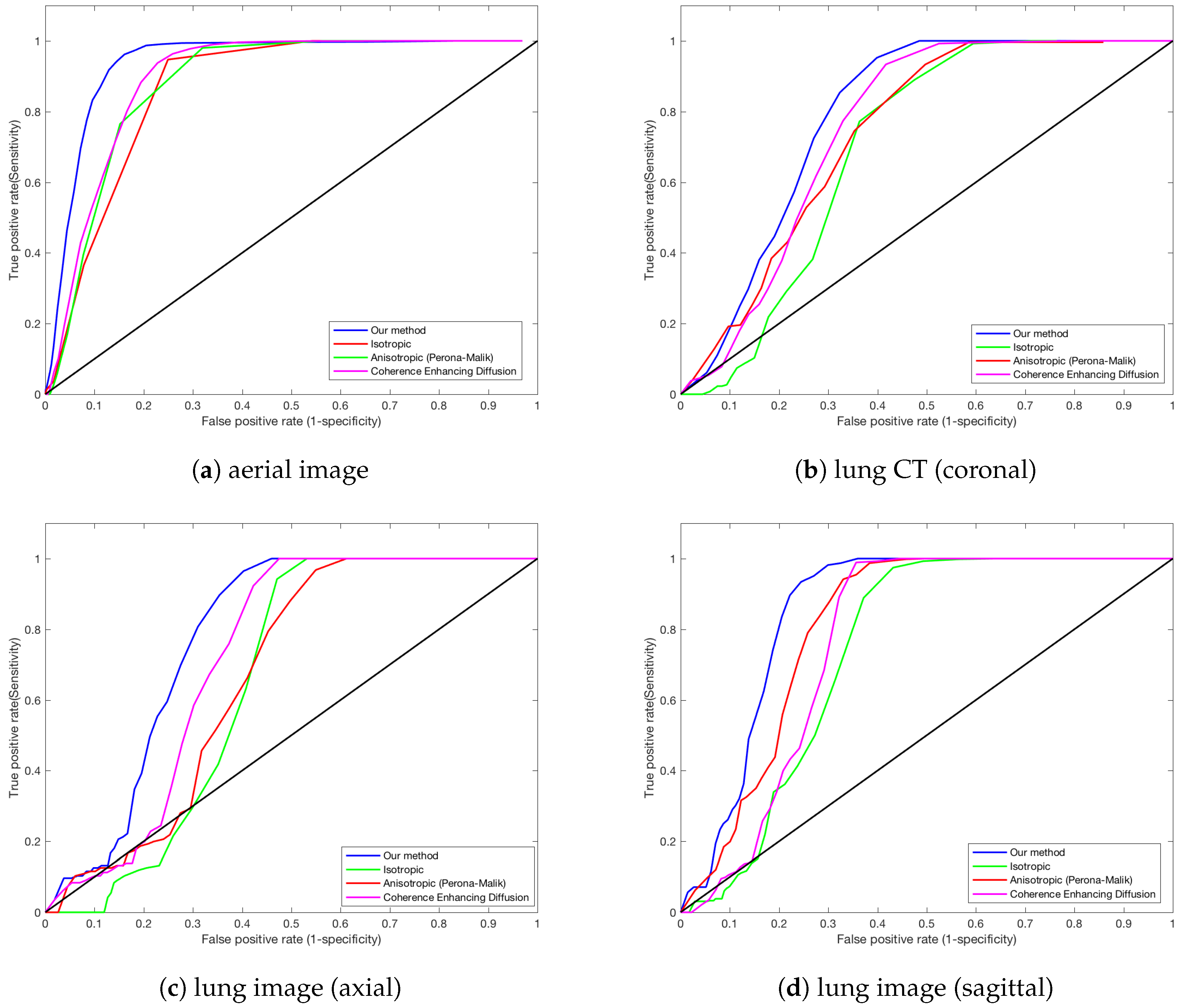
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lindeberg, T. Scale-space theory: A basic tool for analyzing structures at different scales. J. Appl. Stat. 1994, 21, 225–270. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-Space Theory in Computer Vision; Springer Science & Business Media: Berlin, Germany, 2013; Volume 256. [Google Scholar]
- Lindeberg, T.; Gårding, J. Shape-adapted smoothing in estimation of 3-D shape cues from affine deformations of local 2-D brightness structure. Image Vis. Comput. 1997, 15, 415–434. [Google Scholar] [CrossRef]
- Almansa, A.; Lindeberg, T. Fingerprint enhancement by shape adaptation of scale-space operators with automatic scale selection. IEEE Trans. Image Process. 2000, 9, 2027–2042. [Google Scholar]
- Lindeberg, T. Scale-space: A framework for handling image structures at multiple scales. In Proceedings of the CERN School of Computing, Egmond aan Zee, The Netherlands, 8–21 September 1996. [Google Scholar]
- Iijima, T. Observation Theory of Two-Dimensional Visual Patterns; Technical Group on Automata and Automatic Control; IECE: Kyoto, Japan, 1962. [Google Scholar]
- Iijima, T. Basic equation of figure and observational transformation. Syst. Comput. Control. 1971, 2, 70–77. [Google Scholar]
- Weickert, J.; Ishikawa, S.; Imiya, A. Linear scale-space has first been proposed in Japan. J. Math. Imaging Vis. 1999, 10, 237–252. [Google Scholar] [CrossRef]
- Babaud, J.; Witkin, A.P.; Baudin, M.; Duda, R.O. Uniqueness of the Gaussian kernel for scale-space filtering. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 26–33. [Google Scholar] [CrossRef]
- Yuille, A.L.; Poggio, T.A. Scaling theorems for zero crossings. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 15–25. [Google Scholar] [CrossRef]
- Lindeberg, T. Generalized axiomatic scale-space theory. In Advances in Imaging and Electron Physics; Elsevier: Amsterdam, The Netherlands, 2013; Volume 178, pp. 1–96. [Google Scholar]
- Lindeberg, T. A computational theory of visual receptive fields. Biol. Cybern. 2013, 107, 589–635. [Google Scholar] [CrossRef]
- Liu, J.; Moulin, P. Image denoising based on scale-space mixture modeling of wavelet coefficients. In Proceedings of the IEEE International Conference on Image Processing (Cat. 99CH36348), Kobe, Japan, 24–28 October 1999; Volume 1, pp. 386–390. [Google Scholar]
- Acharyya, M.; Kundu, M.K. Document image segmentation using wavelet scale-space features. IEEE Trans. Circuits Syst. Video Technol. 2002, 12, 1117–1127. [Google Scholar] [CrossRef]
- Xu, J.; Osher, S. Iterative regularization and nonlinear inverse scale space applied to wavelet-based denoising. IEEE Trans. Image Process. 2007, 16, 534–544. [Google Scholar] [CrossRef]
- Felsberg, M.; Sommer, G. the monogenic scale-space: A unifying approach to phase-based image processing in scale-space. J. Math. Imaging Vis. 2004, 21, 5–26. [Google Scholar] [CrossRef]
- Spira, A.; Kimmel, R.; Sochen, N. Efficient Beltrami flow using a short time kernel. In Proceedings of the International Conference on Scale-Space Theories in Computer Vision, Skye, UK, 10–12 June 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 511–522. [Google Scholar]
- Mokhtarian, F.; Suomela, R. Robust image corner detection through curvature scale space. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1376–1381. [Google Scholar] [CrossRef]
- Sapiro, G.; Tannenbaum, A. Affine invariant scale-space. Int. J. Comput. Vis. 1993, 11, 25–44. [Google Scholar] [CrossRef]
- Black, M.J.; Sapiro, G.; Marimont, D.H.; Heeger, D. Robust anisotropic diffusion. IEEE Trans. Image Process. 1998, 7, 421–432. [Google Scholar] [CrossRef] [PubMed]
- You, Y.L.; Xu, W.; Tannenbaum, A.; Kaveh, M. Behavioral analysis of anisotropic diffusion in image processing. IEEE Trans. Image Process. 1996, 5, 1539–1553. [Google Scholar] [PubMed]
- Frangakis, A.S.; Hegerl, R. Noise reduction in electron tomographic reconstructions using nonlinear anisotropic diffusion. J. Struct. Biol. 2001, 135, 239–250. [Google Scholar] [CrossRef]
- Nordström, K.N. Biased anisotropic diffusion: A unified regularization and diffusion approach to edge detection. Image Vis. Comput. 1990, 8, 318–327. [Google Scholar] [CrossRef]
- Tasdizen, T.; Whitaker, R.; Burchard, P.; Osher, S. Geometric surface smoothing via anisotropic diffusion of normals. In Proceedings of the IEEE Visualization, Boston, MA, USA, 27 Ocotber–1 November 2002; pp. 125–132. [Google Scholar]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef]
- Weickert, J.; Scharr, H. A scheme for coherence-enhancing diffusion filtering with optimized rotation invariance. J. Vis. Commun. Image Represent. 2002, 13, 103–118. [Google Scholar] [CrossRef]
- Franken, E.; Duits, R. Crossing-preserving coherence-enhancing diffusion on invertible orientation scores. Int. J. Comput. Vis. 2009, 85, 253. [Google Scholar] [CrossRef]
- Weickert, J. Coherence-enhancing shock filters. In Proceedings of the Joint Pattern Recognition Symposium, Magdeburg, Germany, 10–12 September 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 1–8. [Google Scholar]
- Weickert, J. Coherence-Enhancing Diffusion Filtering. Int. J. Comput. Vis. 1999, 31, 111–127. [Google Scholar] [CrossRef]
- Manniesing, R.; Viergever, M.A.; Niessen, W.J. Vessel enhancing diffusion: A scale space representation of vessel structures. Med Image Anal. 2006, 10, 815–825. [Google Scholar] [CrossRef] [PubMed]
- Yarmohammadi, A.; Zangwill, L.M.; Diniz-Filho, A.; Suh, M.H.; Yousefi, S.; Saunders, L.J.; Belghith, A.; Manalastas, P.I.C.; Medeiros, F.A.; Weinreb, R.N. Relationship between optical coherence tomography angiography vessel density and severity of visual field loss in glaucoma. Ophthalmology 2016, 123, 2498–2508. [Google Scholar] [CrossRef] [PubMed]
- Manniesing, R.; Niessen, W. Multiscale vessel enhancing diffusion in CT angiography noise filtering. In Proceedings of the Biennial International Conference on Information Processing in Medical Imaging, Glenwood Springs, CO, USA, 10–15 July 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 138–149. [Google Scholar]
- Canero, C.; Radeva, P. Vesselness enhancement diffusion. Pattern Recognit. Lett. 2003, 24, 3141–3151. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Cohen, L.D. Minimal paths for tubular structure segmentation with coherence penalty and adaptive anisotropy. IEEE Trans. Image Process. 2018, 28, 1271–1284. [Google Scholar] [CrossRef] [PubMed]
- Gottschlich, C.; Schönlieb, C.B. Oriented diffusion filtering for enhancing low-quality fingerprint images. IET Biom. 2012, 1, 105–113. [Google Scholar] [CrossRef]
- Chikkerur, S.; Cartwright, A.N.; Govindaraju, V. Fingerprint enhancement using stft analysis. Pattern Recognit. 2007, 40, 198–211. [Google Scholar] [CrossRef]
- Hashimoto, M.; Araki, T.; Kawata, S. Molecular vibration imaging in the fingerprint region by use of coherent anti-Stokes Raman scattering microscopy with a collinear configuration. Opt. Lett. 2000, 25, 1768–1770. [Google Scholar] [CrossRef]
- Yang, G.; Burger, P.; Firmin, D.; Underwood, S. Structure adaptive anisotropic image filtering. Image Vis. Comput. 1996, 14, 135–145. [Google Scholar] [CrossRef]
- Greenberg, S.; Kogan, D. Improved Structure-adaptive Anisotropic Filter. Pattern Recogn. Lett. 2006, 27, 59–65. [Google Scholar] [CrossRef]
- Starck, J.L.; Candes, E.J.; Donoho, D.L. the curvelet transform for image denoising. IEEE Trans. Image Process. 2002, 11, 670–684. [Google Scholar] [CrossRef] [PubMed]
- Steger, C. Extracting curvilinear structures: A differential geometric approach. In Computer Vision — ECCV ’96, Proceedings of the 4th European Conference on Computer Vision Cambridge, UK, 15–18 April 1996; Buxton, B., Cipolla, R., Eds.; Springer: Berlin/Heidelberg, Germany, 1996; Volume I, pp. 630–641. [Google Scholar] [CrossRef]
- Steger, C. Extraction of curved lines from images. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; Volume 2, pp. 251–255. [Google Scholar] [CrossRef]
- Steger, C. An unbiased detector of curvilinear structures. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 113–125. [Google Scholar] [CrossRef]
- Weickert, J. Scale-Space Properties of Nonlinear Diffusion Filtering with a Diffusion Tensor; Technical Report; Laboratory of Technomathematics, University of Kaiserslautern: Kaiserslautern, Germany, 1994. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Isotropic | Anisotropic | Coherence-Enhancing | Our Method | |||||
|---|---|---|---|---|---|---|---|---|
| Threshold | Precision | Recall | Precision | Recall | Precision | Recall | Precision | Recall |
| 0.6405 | 0.7365 | 0.7750 | 0.0620 | 0.7272 | 0.8670 | 0.7754 | 0.8581 | |
| 0.5556 | 0.8470 | 0.7073 | 0.6099 | 0.6139 | 0.9335 | 0.7706 | 0.9324 | |
| 0.3384 | 0.9288 | 0.6473 | 0.8856 | 0.4893 | 0.9335 | 0.7639 | 0.9393 | |
| 0.2849 | 0.9288 | 0.5868 | 0.8856 | 0.3480 | 0.9592 | 0.5606 | 0.9429 | |
| Isotropic | Anisotropic | Coherence-Enhancing | Our Method | |
|---|---|---|---|---|
| Threshold | F-1 Score | F-1 Score | F-1 Score | F-1 Score |
| 0.6852 | 0.1148 | 0.7910 | 0.81466 | |
| 0.6710 | 0.6550 | 0.7407 | 0.8438 | |
| 0.4961 | 0.7479 | 0.6421 | 0.8426 | |
| 0.4360 | 0.7059 | 0.5107 | 0.7031 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sardorbek, N.; Sohn, B.-S.; Hong, B.-W. Coherence Enhancement Based on Recursive Anisotropic Scale-Space with Adaptive Kernels. Appl. Sci. 2020, 10, 5079. https://doi.org/10.3390/app10155079
Sardorbek N, Sohn B-S, Hong B-W. Coherence Enhancement Based on Recursive Anisotropic Scale-Space with Adaptive Kernels. Applied Sciences. 2020; 10(15):5079. https://doi.org/10.3390/app10155079
Chicago/Turabian StyleSardorbek, Numonov, Bong-Soo Sohn, and Byung-Woo Hong. 2020. "Coherence Enhancement Based on Recursive Anisotropic Scale-Space with Adaptive Kernels" Applied Sciences 10, no. 15: 5079. https://doi.org/10.3390/app10155079
APA StyleSardorbek, N., Sohn, B.-S., & Hong, B.-W. (2020). Coherence Enhancement Based on Recursive Anisotropic Scale-Space with Adaptive Kernels. Applied Sciences, 10(15), 5079. https://doi.org/10.3390/app10155079