Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm


Abstract
1. Introduction
2. Theory Background
2.1. Space Solar Power Station Model
2.2. Basic Differential Evolution Algorithm
- DE/rand/1
- DE/rand/2
- DE/best/1
- DE/best/2
- DE/current-to-best/1
2.3. Clustering Algorithm
3. Task Planning Model of Space-Robot Cluster
3.1. Constraints
3.2. Objective Function
4. Modified Differential Evolution Algorithm
4.1. Adaptive Control Parameter Strategy
4.2. Roulette Selection Strategy
4.3. Multi-Neighbor Operation Strategy
4.4. De-Crossover Strategy
| Algorithm 1. The pseudo-code of uncrossed strategy. |
| Input: path (A, B, C, D, E, A) Output: path_uncross (A, D, C, B, E, A) 1. for i←1:length(path) 2. j←i + 1 3. While j<length(path) 4. ab←path(i,i+1) 5. cd←path(j,j+1) 6. flag←Cross_judgement (ab, cd) % Judge whether cross 7. if flag=1 8. path(i+1:j)←path(j:-1:i+1) 9. end if 10. j←j+1 11. end While 12. end for 13. path_uncross←path 14. return path_uncross |
4.5. Multi-Population Integration Strategy
| Algorithm 2. Pseudo-code of multi-population integration strategy. |
| 1. Set up the each 2. Initialize the , (Change the reward population per generation) 3. Randomly initialize to randomly distribute it in the search space 4. Initialize the and set up the 5. Set up the and 6. while do 7. ; 8. if 9. 10. 11. end if 12. According to is randomly divided into 13. Set up the and 14. for to 15. for to 16. switch 17. case 1: %Perform the first mutation strategy DE/rand-to-pbest/1 in 18. 19. case 2: %Perform the second mutation strategy DE/current-to-rand/1 in 20. 21. case 3: %Perform the third mutation strategy DE/pbad-to-pbest/1 in 22. 23. end switch 24. Perform crossover operations and boundary condition processing 25. if 26. 27. else 28. 29. end if 30. end for 31. 32. end while |
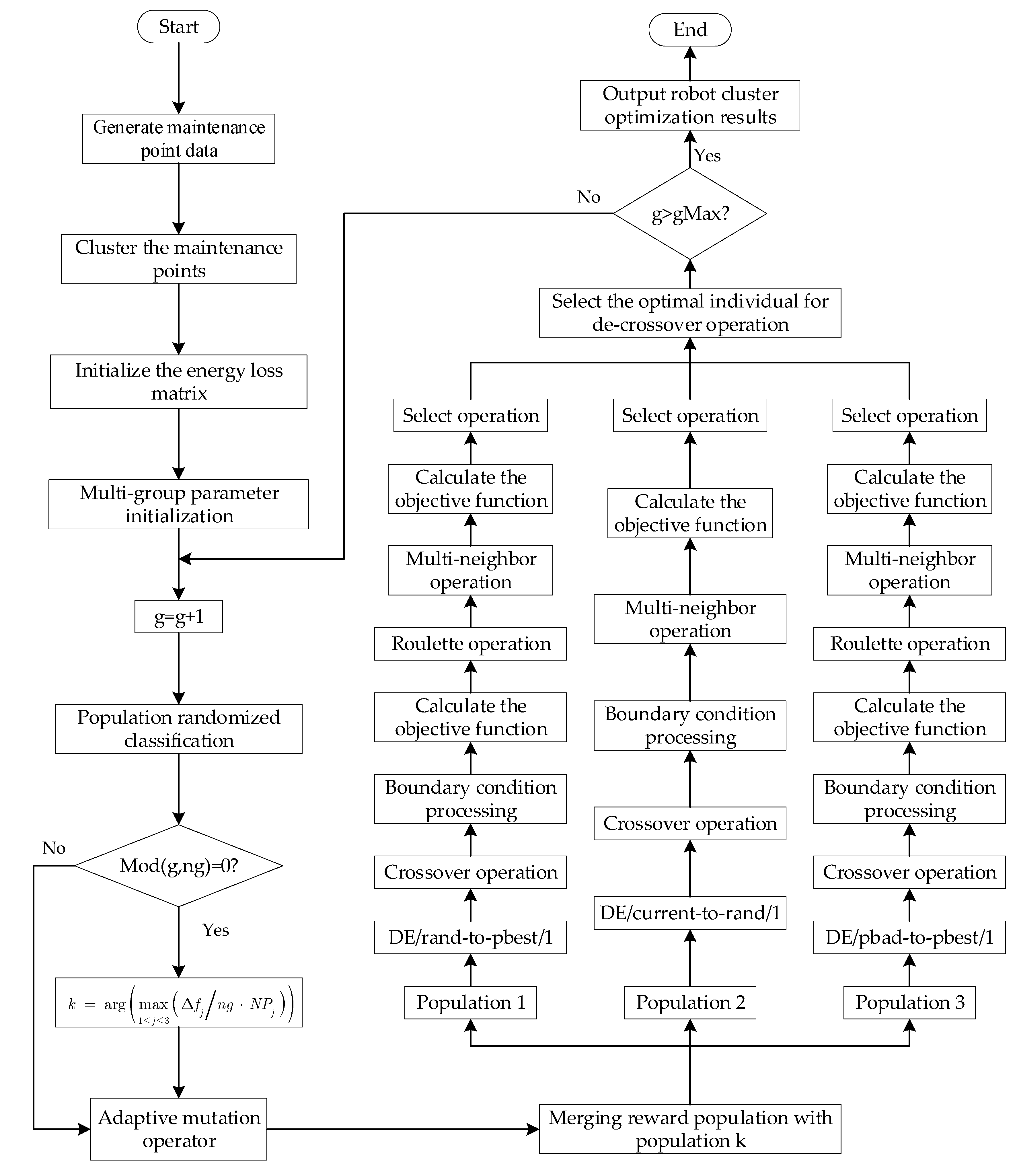
4.6. Algorithm Flow
- First, generating the coordinates of the maintenance node, the maintenance level and the revenue and determine the number of space robots and the origin coordinates;
- Cluster the maintenance nodes to obtain the coordinates of the cluster center point, the revenue within the cluster and the number of target points within the cluster;
- Generate the energy loss matrix between clusters and the distance energy loss matrix from the space robot to each cluster center;
- Modified differential evolution algorithm.
- (1)
- Initialize the multi-population parameters;
- (2)
- Randomized population;
- (3)
- Adaptive differential evolution operator ;
- (4)
- The reward subpopulation is assigned to the population, set and , where ;
- (5)
- carry out their respective strategy differential evolution operations;
- (6)
- Population combination, judge whether the end condition is satisfied and output the robot cluster optimization result if it is satisfied, otherwise repeat steps (3)–(5).
5. Experimental Results
5.1. Space Maintenance Point Clustering
5.2. Comparison Experiment of Optimal-Path Model Optimization
5.2.1. Experimental Comparison
5.2.2. Parameter Analysis
5.3. Comparison Experiment of Modified Differential Evolution Algorithm
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Glaser, P.E. Power from the Sun: Its Future. Science 1968, 162, 857–861. [Google Scholar] [CrossRef] [PubMed]
- Oegerle, W.R.; Purves, L.; Budinoff, J.; Moe, R.V.; Carnahan, T.M.; Evans, D.C.; Kim, C.K. Concept for a large scalable space telescope: In-space assembly. Proc. SPIE 2006, 6265, 62652C. [Google Scholar]
- Yoshida, K.; Hashizume, K.; Abiko, S. Zero reaction maneuver: Flight validation with ETS-VII space robot and extension to kinematically redundant arm. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Korea, 21–26 May 2001; pp. 441–446. [Google Scholar]
- Zemlyakov, S.D.; Rutkovskii, V.Y.; Sukhanov, V.M.O. Some questions of control of the robotized in-orbit assembly of large space structures. Autom. Remote Control 2006, 67, 1215–1227. [Google Scholar] [CrossRef]
- Lee, D. Resource-based task allocation for multi-robot systems. Robot. Auton. Syst. 2018, 103, 151–161. [Google Scholar] [CrossRef]
- Kanakia, A.; Touri, B.; Correll, N. Modeling multi-robot task allocation with limited information as global game. Swarm Intell. 2016, 10, 147–160. [Google Scholar] [CrossRef]
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A Survey and Analysis of Multi-Robot Coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Badreldin, M.; Hussein, A.; Khamis, A. A comparative study between optimization and market-based approaches to multi-robot task allocation. Adv. Artif. Intell. 2013, 2013, 12. [Google Scholar] [CrossRef]
- Vig, L.; Adams, J.A. Market-Based Multi-robot Coalition Formation. In Proceedings of the Distributed Autonomous Robotic Systems; Springer: Tokyo, Japan, 2006; pp. 227–236. [Google Scholar]
- Yin, P.; Yu, S.; Wang, P.; Wang, Y. Multi-objective task allocation in distributed computing systems by hybrid particle swarm optimization. Appl. Math. Comput. 2007, 184, 407–420. [Google Scholar] [CrossRef]
- Carter, A.E.; Ragsdale, C.T. A new approach to solving the multiple traveling salesperson problem using genetic algorithms. Eur. J. Oper. Res. 2006, 175, 246–257. [Google Scholar] [CrossRef]
- Tan, Y.; Zheng, Z. Research Advance in Swarm Robotics. Def. Technol. 2013, 9, 18–39. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Q.; Ma, L.; Zhang, Z.; Liu, Y. A hybrid ant colony optimization algorithm for a multi-objective vehicle routing problem with flexible time windows. Inf. Sci. 2019, 490, 166–190. [Google Scholar] [CrossRef]
- Moisiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Zhen, Z.; Xing, D.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Han, Y.; Li, D.; Chen, J.; Yang, X.; Hu, Y.; Zhang, G. A Multi-Robots Task Allocation Algorithm Based on Relevance and Ability with Group Collaboration. Int. J. Intell. Eng. Syst. 2010, 3, 33–41. [Google Scholar] [CrossRef]
- Yao, W.; Qi, N.; Wan, N.; Liu, Y. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerosp. Sci. Technol. 2019, 86, 455–464. [Google Scholar] [CrossRef]
- Schwarzrock, J.; Zacarias, I.; Bazzan, A.L.C.; Fernandes, R.Q.D.A.; Moreira, L.H.; De Freitas, E.P. Solving task allocation problem in multi Unmanned Aerial Vehicles systems using Swarm intelligence. Eng. Appl. Artif. Intell. 2018, 72, 10–20. [Google Scholar] [CrossRef]
- Gerkey, B.P.; Mataric, M.J. A Formal Analysis and Taxonomy of Task Allocation in Multi-Robot Systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef]
- Edison, E.; Shima, T. Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Comput. Oper. Res. 2011, 38, 340–356. [Google Scholar] [CrossRef]
- Lee, M.; Chen, B.; Lu, W. Failure-Robot Path Complementation for Robot Swarm Mission Planning. Appl. Sci. 2019, 9, 3756. [Google Scholar] [CrossRef]
- Ye, F.; Chen, J.; Tian, Y.; Jiang, T. Cooperative Multiple Task Assignment of Heterogeneous UAVs Using a Modified Genetic Algorithm with Multi-type-gene Chromosome Encoding Strategy. J. Intell. Robot. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Deng, Q.; Yu, J.; Wang, N. Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes. Chin. J. Aeronaut. 2013, 26, 1238–1250. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Tanchoco, J.M.A.; Brunese, P.A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Comput. Ind. Eng. 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Hussein, A.; Marinplaza, P.; Garcia, F.; Armingol, J.M. Hybrid Optimization-Based Approach for Multiple Intelligent Vehicles Requests Allocation. J. Adv. Transp. 2018, 2018, 2493401. [Google Scholar] [CrossRef]
- Zheng, T.; Li, J. Multi-robot task allocation and scheduling based on fish swarm algorithm. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 6681–6685. [Google Scholar]
- Chen, X.; Zhang, P.; Du, G.; Li, F. Ant Colony Optimization Based Memetic Algorithm to Solve Bi-Objective Multiple Traveling Salesmen Problem for Multi-Robot Systems. IEEE Access 2018, 6, 21745–21757. [Google Scholar] [CrossRef]
- Khan, I.; Maiti, M.K. A swap sequence based Artificial Bee Colony algorithm for Traveling Salesman Problem. Swarm Evol. Comput. 2019, 44, 428–438. [Google Scholar] [CrossRef]
- Trigui, S.; Cheikhrouhou, O.; Koubaa, A.; Baroudi, U.; Youssef, H. FL-MTSP: A fuzzy logic approach to solve the multi-objective multiple traveling salesman problem for multi-robot systems. Soft Comput. 2017, 21, 7351–7362. [Google Scholar] [CrossRef]
- Mahi, M.; Baykan, O.K.; Kodaz, H. A new hybrid method based on Particle Swarm Optimization, Ant Colony Optimization and 3-Opt algorithms for Traveling Salesman Problem. Appl. Soft Comput. 2015, 30, 484–490. [Google Scholar] [CrossRef]
- Cheng, Z.; Hou, X.; Zhang, X.; Zhou, L.; Guo, J.; Song, C. In-orbit assembly mission for the Space Solar Power Station. Acta Astronaut. 2016, 129, 299–308. [Google Scholar] [CrossRef]
- Li, X.; Duan, B.; Song, L.; Yang, Y.; Zhang, Y.; Wang, D. A new concept of space solar power satellite. Acta Astronaut. 2017, 136, 182–189. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. A K-Means Clustering Algorithm. J. R. Stat. Soc. Ser. C Appl. Stat. 1979, 28, 100–108. [Google Scholar]
- Xiao, P.; Ju, H.; Li, Q.; Xu, H.; Lu, C. Task Planning of Space Maintenance Robot Using Modified Clustering Method. IEEE Access 2020, 8, 45618–45626. [Google Scholar] [CrossRef]
- Fraley, C.; Raftery, A.E. Model-Based Clustering, Discriminant Analysis, and Density Estimation. J. Am. Stat. Assoc. 2002, 97, 611–631. [Google Scholar] [CrossRef]
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M.A. A novel population initialization method for accelerating evolutionary algorithms. Comput. Math. Appl. 2007, 53, 1605–1614. [Google Scholar] [CrossRef]
- Zhang, J.; Sanderson, A.C. JADE: Adaptive Differential Evolution with Optional External Archive. IEEE Trans. Evol. Comput. 2009, 13, 945–958. [Google Scholar] [CrossRef]
- Brest, J.; Greiner, S.; Boskovic, B.; Mernik, M.; Zumer, V. Self-Adapting Control Parameters in Differential Evolution: A Comparative Study on Numerical Benchmark Problems. IEEE Trans. Evol. Comput. 2006, 10, 646–657. [Google Scholar] [CrossRef]
- Wu, G.; Mallipeddi, R.; Suganthan, P.N.; Wang, R.; Chen, H. Differential evolution with multi-population based ensemble of mutation strategies. Inf. Sci. 2016, 329, 329–345. [Google Scholar] [CrossRef]
- Tong, L.; Dong, M.; Jing, C. An improved multi-population ensemble differential evolution. Neurocomputing 2018, 290, 130–147. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num | (x, y) | NPC | IC | Num | (x, y) | NPC | IC |
|---|---|---|---|---|---|---|---|
| 1 | (−88.5, −28.2) | 6 | 110 | 51 | (51.5, 24.0) | 9 | 170 |
| 2 | (−23.5, −12.0) | 18 | 350 | 52 | (40.0, 2.4) | 11 | 220 |
| 3 | (−80.0, −6.6) | 13 | 220 | 53 | (68.5, 9.6) | 3 | 80 |
| 4 | (−46.5, −6.0) | 8 | 130 | 54 | (56.5, 4.2) | 16 | 340 |
| 5 | (−56.5, −8.4) | 7 | 130 | 55 | (−82.0, −24.0) | 4 | 70 |
| 6 | (−40.0, −16.8) | 14 | 310 | 56 | (−75.5, 2.4) | 9 | 220 |
| 7 | (−13.5, −13.2) | 7 | 110 | 57 | (−63.0, −2.4) | 5 | 80 |
| 8 | (−10.0, −3.6) | 15 | 300 | 58 | (2.5, −8.4) | 5 | 120 |
| 9 | (−6.5, −18.6) | 9 | 160 | 59 | (−67.0, −16.8) | 9 | 190 |
| 10 | (−38.5, −6.0) | 16 | 290 | 60 | (−4.5, 18.0) | 7 | 130 |
| 11 | (−50.0, −27.6) | 6 | 110 | 61 | (−34.0, 26.4) | 13 | 300 |
| 12 | (−88.5, 1.8) | 10 | 210 | 62 | (−31.5, 10.8) | 6 | 100 |
| 13 | (−23.5, 18.0) | 6 | 130 | 63 | (9.5, −22.8) | 9 | 220 |
| 14 | (−80.0, 23.4) | 16 | 330 | 64 | (17.5, −3.6) | 7 | 170 |
| 15 | (−46.5, 24.0) | 17 | 340 | 65 | (81.5, −24.0) | 5 | 70 |
| 16 | (−56.5, 21.6) | 8 | 130 | 66 | (89.5, −15.6) | 9 | 160 |
| 17 | (−40.0, 13.2) | 20 | 370 | 67 | (43.5, −22.2) | 11 | 260 |
| 18 | (−16.5, 3.6) | 7 | 130 | 68 | (24.0, −18.0) | 8 | 170 |
| 19 | (−60.0, 10.2) | 17 | 290 | 69 | (9.5, 9.0) | 6 | 80 |
| 20 | (−66.5, 25.2) | 6 | 120 | 70 | (15.0, 6.0) | 3 | 60 |
| 21 | (−13.5, 16.8) | 14 | 260 | 71 | (82.0, 16.2) | 6 | 120 |
| 22 | (−10.0, 26.4) | 20 | 430 | 72 | (59.0, 24.6) | 5 | 100 |
| 23 | (−6.5, 11.4) | 9 | 220 | 73 | (31.5, 4.8) | 3 | 50 |
| 24 | (−50.0, 2.4) | 9 | 200 | 74 | (18.0, −9.6) | 6 | 80 |
| 25 | (−21.5, 9.6) | 5 | 70 | 75 | (18.5, 16.8) | 11 | 200 |
| 26 | (−33.5, 4.2) | 8 | 140 | 76 | (39.0, 12.6) | 6 | 150 |
| 27 | (−73.5, 10.2) | 4 | 80 | 77 | (−15.5, −21.0) | 7 | 130 |
| 28 | (66.5, −12.0) | 12 | 250 | 78 | (−6.0, 3.6) | 4 | 110 |
| 29 | (10.0, −6.6) | 5 | 80 | 79 | (−30.5, −21.0) | 4 | 70 |
| 30 | (43.5, −6.0) | 6 | 100 | 80 | (−22.5, 26.4) | 5 | 110 |
| 31 | (33.5, −8.4) | 12 | 260 | 81 | (−70.5, 18.6) | 6 | 140 |
| 32 | (50.0, −16.8) | 12 | 200 | 82 | (57.5, −8.4) | 5 | 70 |
| 33 | (23.5, −4.8) | 7 | 130 | 83 | (60.0, −22.2) | 7 | 150 |
| 34 | (76.5, −13.2) | 14 | 250 | 84 | (92.5, 18.0) | 5 | 120 |
| 35 | (80.0, −3.6) | 14 | 270 | 85 | (60.0, 13.8) | 8 | 120 |
| 36 | (51.5, −6.0) | 7 | 140 | 86 | (−30.0, −5.4) | 3 | 50 |
| 37 | (68.5, −20.4) | 6 | 90 | 87 | (−31.5, −15.0) | 3 | 60 |
| 38 | (1.5,1.8) | 5 | 90 | 88 | (−52.5, −18.6) | 6 | 110 |
| 39 | (66.5, 18.0) | 7 | 120 | 89 | (2.0, 12.0) | 5 | 130 |
| 40 | (10.0, 23.4) | 17 | 340 | 90 | (10.5, −1.2) | 4 | 100 |
| 41 | (43.5, 24.0) | 9 | 200 | 91 | (84.0, 3.0) | 10 | 220 |
| 42 | (33.5, 21.6) | 9 | 170 | 92 | (39.0, 29.4) | 4 | 110 |
| 43 | (50.0, 13.2) | 18 | 350 | 93 | (−73.5, −19.8) | 1 | 10 |
| 44 | (70.0,25.2) | 11 | 210 | 94 | (1.5, −28.2) | 1 | 30 |
| 45 | (73.5, 3.6) | 6 | 150 | 95 | (73.5, −26.4) | 1 | 10 |
| 46 | (30.0, 10.2) | 6 | 130 | 96 | (30.0, −19.8) | 1 | 30 |
| 47 | (23.5, 25.2) | 3 | 80 | 97 | (83.5, −18.6) | 1 | 30 |
| 48 | (76.5, 16.8) | 12 | 290 | 98 | (40.0, −27.6) | 1 | 10 |
| 49 | (80.0, 26.4) | 10 | 230 | 99 | (−24.5, 5.4) | 1 | 30 |
| 50 | (83.5, 11.4) | 10 | 190 | 100 | (19.0, 28.8) | 1 | 20 |
| Robot Number | Robot 1 | Robot 2 | Robot 3 | Robot 4 | Robot 5 |
|---|---|---|---|---|---|
| Total capacity 5000 | 1200 | 950 | 950 | 950 | 950 |
| Total capacity 6000 | 1500 | 1125 | 1125 | 1125 | 1125 |
| Total capacity 7000 | 1800 | 1300 | 1300 | 1300 | 1300 |
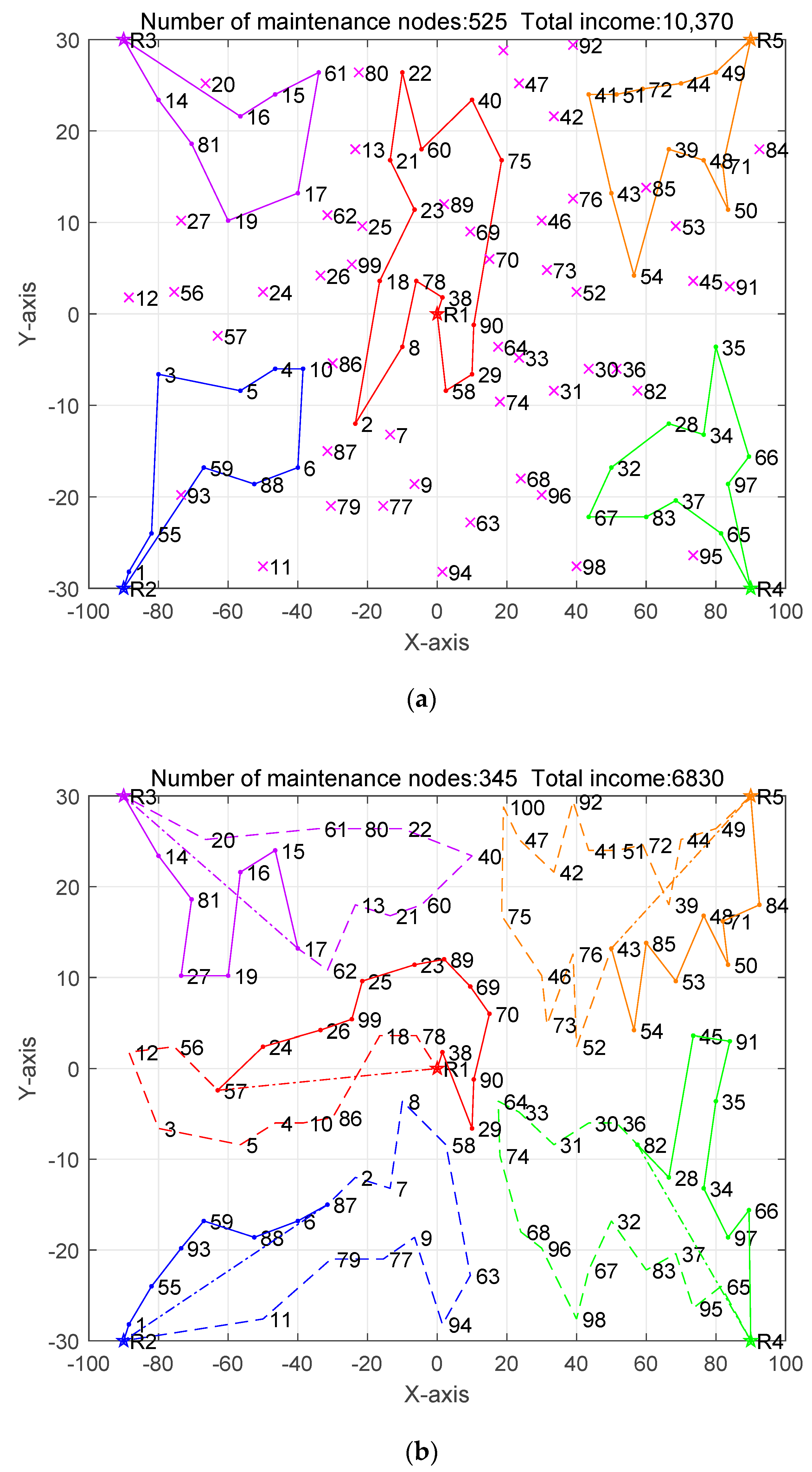
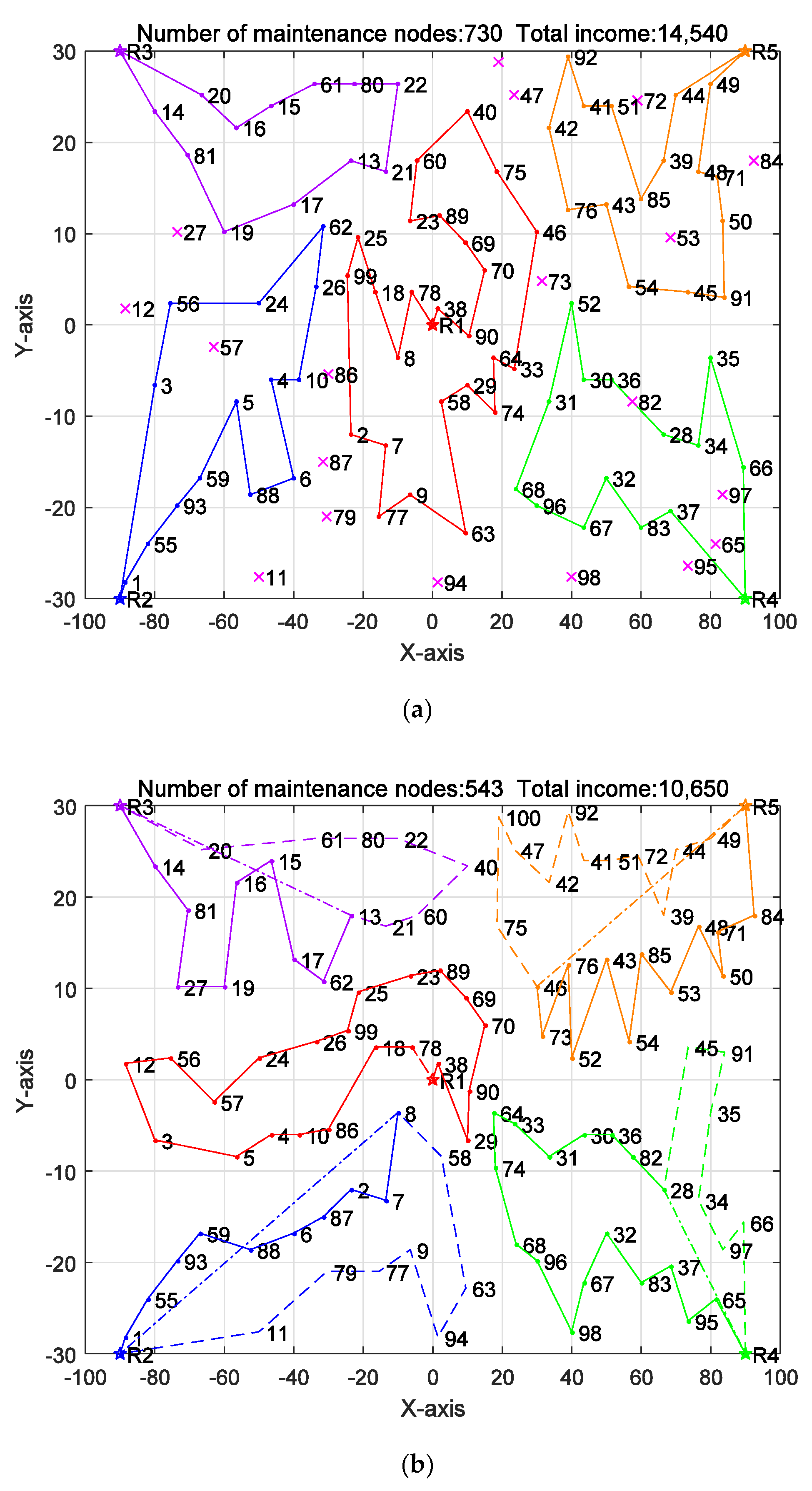
| Type | Robot | Consumption | Income | Number of Tasks | Income Rate |
|---|---|---|---|---|---|
| Multirobot optimal-path model | R1 | 945.53 | 10,370 | 525 | 65.34% |
| R2 | 753.56 | ||||
| R3 | 738.72 | ||||
| R4 | 741.71 | ||||
| R5 | 752.41 | ||||
| Multirobot shortest-path model | R1 | 934.61 | 6830 | 345 | 43.04% |
| R2 | 658.22 | ||||
| R3 | 751.03 | ||||
| R4 | 692.13 | ||||
| R5 | 686.65 |
| Type | Robot | Consumption | Income | Number of Tasks | Income Rate |
|---|---|---|---|---|---|
| Multirobot optimal-path model | R1 | 1184.51 | 12,640 | 632 | 79.65% |
| R2 | 890.12 | ||||
| R3 | 888.59 | ||||
| R4 | 899.01 | ||||
| R5 | 896.14 | ||||
| Multirobot shortest-path model | R1 | 1184.70 | 9160 | 466 | 57.84% |
| R2 | 865.95 | ||||
| R3 | 845.31 | ||||
| R4 | 843.96 | ||||
| R5 | 880.99 |
| Type | Robot | Consumption | Income | Number of Tasks | Income Rate |
|---|---|---|---|---|---|
| Multirobot optimal-path model | R1 | 1433.22 | 14,540 | 730 | 91.62% |
| R2 | 1035.71 | ||||
| R3 | 1024.98 | ||||
| R4 | 1036.98 | ||||
| R5 | 1021.90 | ||||
| Multirobot shortest-path model | R1 | 1273.64 | 10,650 | 543 | 67.11% |
| R2 | 961.64 | ||||
| R3 | 935.14 | ||||
| R4 | 1001.92 | ||||
| R5 | 1018.60 |
| Num | Maximum Income | Maintenance Points | ||
|---|---|---|---|---|
| 1 | 0.10 | 20 | 11,660 | 585 |
| 2 | 0.15 | 20 | 12,030 | 606 |
| 3 | 0.20 | 20 | 12,240 | 605 |
| 4 | 0.25 | 20 | 12,640 | 632 |
| 5 | 0.25 | 10 | 12,180 | 609 |
| 6 | 0.25 | 30 | 11,640 | 580 |
| 7 | 0.25 | 40 | 11,450 | 565 |
| Algorithms | Objective Function Value | Total Income | Maintenance Points |
|---|---|---|---|
| DE | 4300.27 | 5150 | 251 |
| JDE [40] | 8705.85 | 9590 | 468 |
| MPEDE [41] | 8906.75 | 9850 | 502 |
| Modified DE | 11,688.33 | 12,640 | 632 |
| Algorithms | Objective Function Value | Maximum Income | Maintenance Points |
|---|---|---|---|
| GA | 5794.99 | 6470 | 321 |
| ACO | 7049.01 | 7790 | 396 |
| ABC | 10,246.18 | 11,200 | 561 |
| modified DE | 11,688.33 | 12,640 | 632 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, P.; Ju, H.; Li, Q.; Chen, F. Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm. Appl. Sci. 2020, 10, 5000. https://doi.org/10.3390/app10145000
Xiao P, Ju H, Li Q, Chen F. Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm. Applied Sciences. 2020; 10(14):5000. https://doi.org/10.3390/app10145000
Chicago/Turabian StyleXiao, Pengfei, Hehua Ju, Qidong Li, and Feifei Chen. 2020. "Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm" Applied Sciences 10, no. 14: 5000. https://doi.org/10.3390/app10145000
APA StyleXiao, P., Ju, H., Li, Q., & Chen, F. (2020). Task Planning of Space-Robot Clusters Based on Modified Differential Evolution Algorithm. Applied Sciences, 10(14), 5000. https://doi.org/10.3390/app10145000