Depth of Interaction Estimation in a Preclinical PET Scanner Equipped with Monolithic Crystals Coupled to SiPMs Using a Deep Neural Network



Abstract
1. Introduction
2. Materials and Methods
2.1. Geometrical Configuration of Preclinical PET Scanner
2.1.1. Preclinical PET Detector Blocks
2.1.2. Preclinical PET Scanner Configuration
2.2. Monte Carlo Simulations
2.3. Image Reconstruction
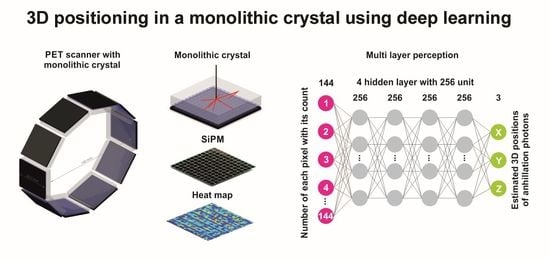
2.4. Neural Network Architecture
2.5. Validation and Performance Evaluation
2.5.1. Spatial Resolution
2.5.2. Sensitivity
2.5.3. Image Quality
3. Results
3.1. Validation
3.2. Quantitative Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qi, J.; Leahy, R.M. Iterative reconstruction techniques in emission computed tomography. Phys. Med. Biol. 2006, 51, R541. [Google Scholar] [CrossRef]
- Reader, A.J.; Zaidi, H. Advances in PET image reconstruction. PET Clin. 2007, 2, 173–190. [Google Scholar] [CrossRef]
- Zaidi, H. Molecular Imaging of Small Animals: Instrumentation and Applications; Springer: Berlin, Germany, 2014. [Google Scholar]
- Stolin, A.V.; Martone, P.F.; Jaliparthi, G.; Raylman, R.R. Preclinical positron emission tomography scanner based on a monolithic annulus of scintillator: Initial design study. J. Med. Imaging 2017, 4, 011007. [Google Scholar] [CrossRef] [PubMed]
- Pajak, M.Z.; Volgyes, D.; Pimlott, S.L.; Salvador, C.C.; Asensi, A.S.; McKeown, C.; Waldeck, J.; Anderson, K.I. NEMA NU4-2008 performance evaluation of Albira: A two-ring small-animal PET system using continuous LYSO crystals. Open Med. J. 2016, 3, 12–26. [Google Scholar] [CrossRef]
- Krishnamoorthy, S.; Blankemeyer, E.; Mollet, P.; Surti, S.; Van Holen, R.; Karp, J.S. Performance evaluation of the MOLECUBES β-CUBE—A high spatial resolution and high sensitivity small animal PET scanner utilizing monolithic LYSO scintillation detectors. Phys. Med. Biol. 2018, 63, 155013. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.S.; Lee, J.S. Depth-of-interaction measurement in a single-layer crystal array with a single-ended readout using digital silicon photomultiplier. Phys. Med. Biol. 2015, 60, 6495. [Google Scholar] [CrossRef] [PubMed]
- González-Montoro, A.; Sánchez, F.; Martí, R.; Hernández, L.; Aguilar, A.; Barberá, J.; Catret, J.V.; Cañizares, G.; Conde, P.; Lamprou, E. Detector block performance based on a monolithic LYSO crystal using a novel signal multiplexing method. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 2018, 912, 372–377. [Google Scholar] [CrossRef]
- Borghi, G.; Peet, B.J.; Tabacchini, V.; Schaart, D.R. A 32 mm × 32 mm × 22 mm monolithic LYSO: Ce detector with dual-sided digital photon counter readout for ultrahigh-performance TOF-PET and TOF-PET/MRI. Phys. Med. Biol. 2016, 61, 4929. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhu, W.; Cheng, X.; Li, D. 3D position estimation using an artificial neural network for a continuous scintillator PET detector. Phys. Med. Biol. 2013, 58, 1375. [Google Scholar] [CrossRef]
- Müller, F.; Schug, D.; Hallen, P.; Grahe, J.; Schulz, V. Gradient tree boosting-based positioning method for monolithic scintillator crystals in positron emission tomography. IEEE Trans. Radiat. Plasma Med. Sci. 2018, 2, 411–421. [Google Scholar] [CrossRef]
- Müller, F.; Schug, D.; Hallen, P.; Grahe, J.; Schulz, V. A novel DOI positioning algorithm for monolithic scintillator crystals in PET based on gradient tree boosting. IEEE Trans. Radiat. Plasma Med. Sci. 2018, 3, 465–474. [Google Scholar] [CrossRef]
- Hashimoto, F.; Ote, K.; Ota, R.; Hasegawa, T. A feasibility study on 3D interaction position estimation using deep neural network in Cherenkov-based detector: A Monte Carlo simulation study. Biomed. Phys. Eng. Express 2019, 5, 035001. [Google Scholar] [CrossRef]
- Sajedi, S.; Zeraatkar, N.; Taheri, M.; Kaviani, S.; Khanmohammadi, H.; Sarkar, S.; Sabet, H.; Ay, M.R. Development and preliminary results of Xtrim-PET, a modular cost-effective preclinical scanner. Nucl. Instr. Meth. A. 2019, 940, 288–295. [Google Scholar] [CrossRef]
- Amirrashedi, M.; Sarkar, S.; Ghafarian, P.; Shahraki, R.H.; Geramifar, P.; Zaidi, H.; Ay, M.R. NEMA NU-4 2008 performance evaluation of Xtrim-PET: A prototype SiPM-based preclinical scanner. Med. Phys. 2019, 46, 4816–4825. [Google Scholar] [CrossRef]
- Agostinelli, S.; Allison, J.; Amako, K.; Apostolakis, J.; Araujo, H.; Arce, P.; Asai, M.; Axen, D.; Banerjee, S.; Barrand, G.U. GEANT4—A simulation toolkit. Nucl. Instrum. Meth. A 2003, 506, 250–303. [Google Scholar] [CrossRef]
- Nayar, S.K.; Ikeuchi, K.; Kanade, T. Surface reflection: Physical and geometrical perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 611–634. [Google Scholar] [CrossRef]
- Allison, J.; Amako, K.; Apostolakis, J.; Araujo, H.; Arce Dubois, P.; Asai, M.; Barrand, G.; Capra, R.; Chauvie, S.; Chytracek, R.; et al. Geant4 developments and applications. IEEE Trans. Nucl. Sci. 2006, 53, 270–278. [Google Scholar] [CrossRef]
- Allison, J.; Amako, K.; Apostolakis, J.; Arce, P.; Asai, M.; Aso, T.; Bagli, E.; Bagulya, A.; Banerjee, S.; Barrand, G.; et al. Recent developments in Geant4. Nucl. Instr. Meth. A 2016, 835, 186–225. [Google Scholar] [CrossRef]
- Sanaat, A.; Arabi, H.; Ay, M.; Zaidi, H. Novel preclinical PET geometrical concept using a monolithic scintillator crystal offering concurrent enhancement in spatial resolution and detection sensitivity: A simulation study. Phys. Med. Biol. 2020, 65, 045013. [Google Scholar] [CrossRef]
- Sanaat, A.; Zaidi, H. Accurate estimation of depth of interaction in PET on monolithic crystal coupled to SiPMs using deep convolutional neural network and Monte Carlo simulations. In Proceedings of the IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Manchester, UK, 26 October–2 November 2019; p. M-06-119. [Google Scholar]
- Thielemans, K.; Tsoumpas, C.; Mustafovic, S.; Beisel, T.; Aguiar, P.; Dikaios, N.; Jacobson, M.W. STIR: Software for tomographic image reconstruction release 2. Phys. Med. Biol. 2012, 57, 867–883. [Google Scholar] [CrossRef]
- Sanaat, A.; Zafarghandi, M.S.; Ay, M.R. Design and performance evaluation of high resolution small animal PET scanner based on monolithic crystal: A simulation study. J. Instrum. 2019, 14, P01005. [Google Scholar] [CrossRef]
- National Electrical Manufacturers Association. NEMA Standards Publication NU 4-2008. Performance Measurements of Small Animal Positron Emission Tomographs; National Electrical Manufacturers Association: Rosslyn, VA, USA, 2008. [Google Scholar]
- Moskal, P.; Niedźwiecki, S.; Bednarski, T.; Czerwiński, E.; Kubicz, E.; Moskal, I.; Pawlik-Niedźwiecka, M.; Sharma, N.; Silarski, M.; Zieliński, M. Test of a single module of the J-PET scanner based on plastic scintillators. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 2014, 764, 317–321. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of block rings | 1 |
| Detector blocks per ring | 10 |
| Scintillator material | LYSO |
| Crystals per block | 24 × 24 = 576 |
| Axial FOV | 50 mm |
| Transaxial FOV | 100 mm |
| Number of image planes | 109 |
| Coincidence time window | 4.0 ns |
| Energy window | 150–650 keV |
| Energy resolution | 11.7% |
| Detector block entrance area | 50 × 50 mm2 |
| Crystal size (thickness) | 2 × 2 × 10 mm3 |
| Detector ring diameter | 168 mm |
| Photodetector | SiPM |
| Array size | 12 × 12 |
| Pixel pitch | 4.2 mm |
| Light guide size | 50 × 50 × 3 mm3 |
| Reflector material | BaSO4 |
| Thickness | 0.1 mm |
| Depth (mm) | Anger (mm) | MLP (mm) |
|---|---|---|
| 2 | 0.66 | 0.42 |
| 4 | 0.79 | 0.53 |
| 6 | 0.98 | 0.75 |
| 8 | 1.2 | 0.91 |
| 10 | 1.38 | 1.02 |
| Reference Z | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Predicted Z | 1.0 | 2.0 | 3.1 | 4.3 | 5.3 | 6.4 | 7.6 | 8.6 | 8.5 | 8.6 |
| STD | 0.3 | 0.3 | 0.4 | 0.6 | 0.6 | 1.2 | 1.6 | 1.7 | 1.7 | 1.7 |
| Bias (%) | 3.8 | −1.7 | 2.5 | 6.4 | 6.7 | 6.8 | 8.7 | 7.6 | −5.8 | −14.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanaat, A.; Zaidi, H. Depth of Interaction Estimation in a Preclinical PET Scanner Equipped with Monolithic Crystals Coupled to SiPMs Using a Deep Neural Network. Appl. Sci. 2020, 10, 4753. https://doi.org/10.3390/app10144753
Sanaat A, Zaidi H. Depth of Interaction Estimation in a Preclinical PET Scanner Equipped with Monolithic Crystals Coupled to SiPMs Using a Deep Neural Network. Applied Sciences. 2020; 10(14):4753. https://doi.org/10.3390/app10144753
Chicago/Turabian StyleSanaat, Amirhossein, and Habib Zaidi. 2020. "Depth of Interaction Estimation in a Preclinical PET Scanner Equipped with Monolithic Crystals Coupled to SiPMs Using a Deep Neural Network" Applied Sciences 10, no. 14: 4753. https://doi.org/10.3390/app10144753
APA StyleSanaat, A., & Zaidi, H. (2020). Depth of Interaction Estimation in a Preclinical PET Scanner Equipped with Monolithic Crystals Coupled to SiPMs Using a Deep Neural Network. Applied Sciences, 10(14), 4753. https://doi.org/10.3390/app10144753