Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine




Abstract
1. Introduction
2. Numerical Modelling
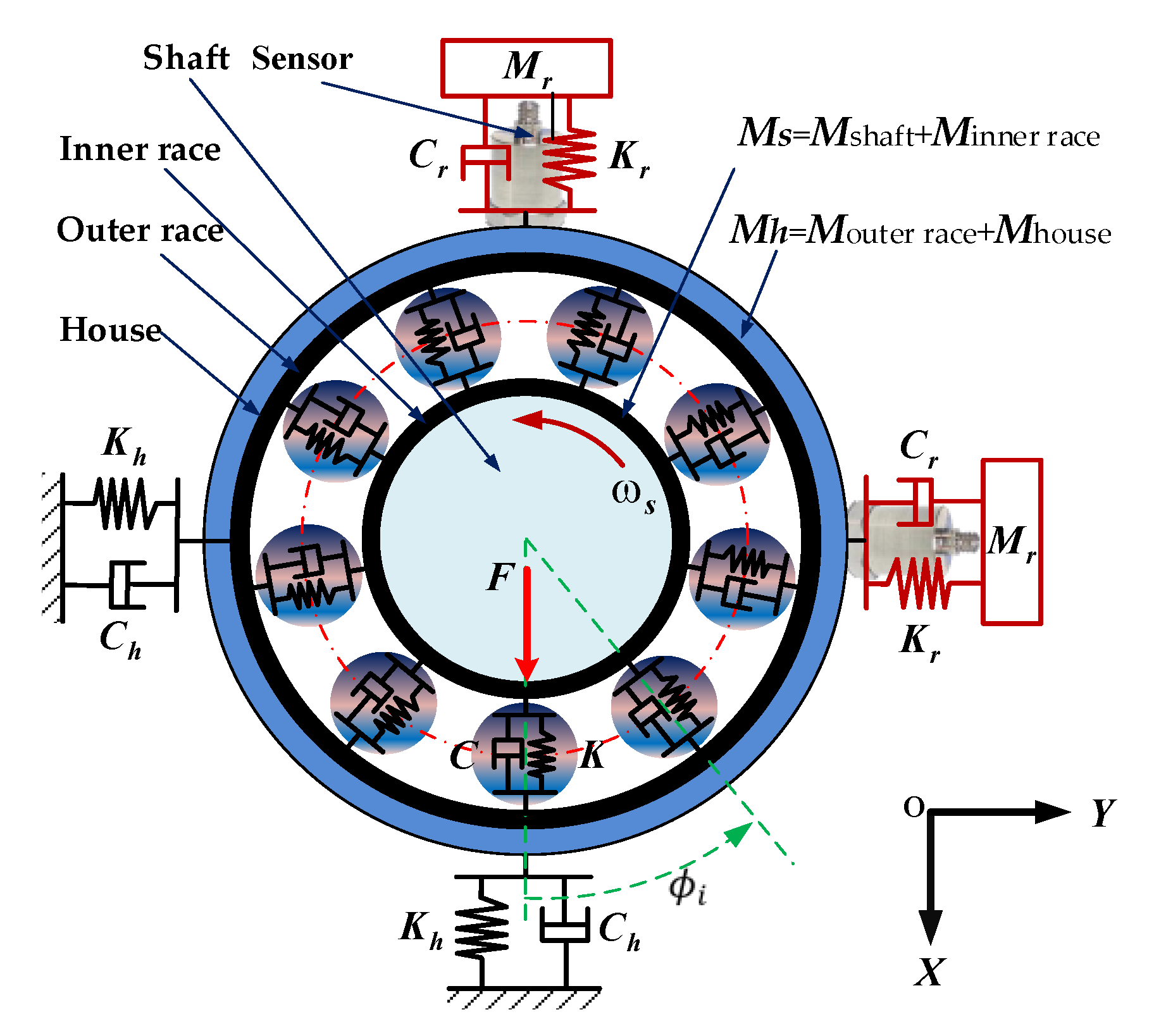
2.1. Bearing Vibration Model Considering Clearance
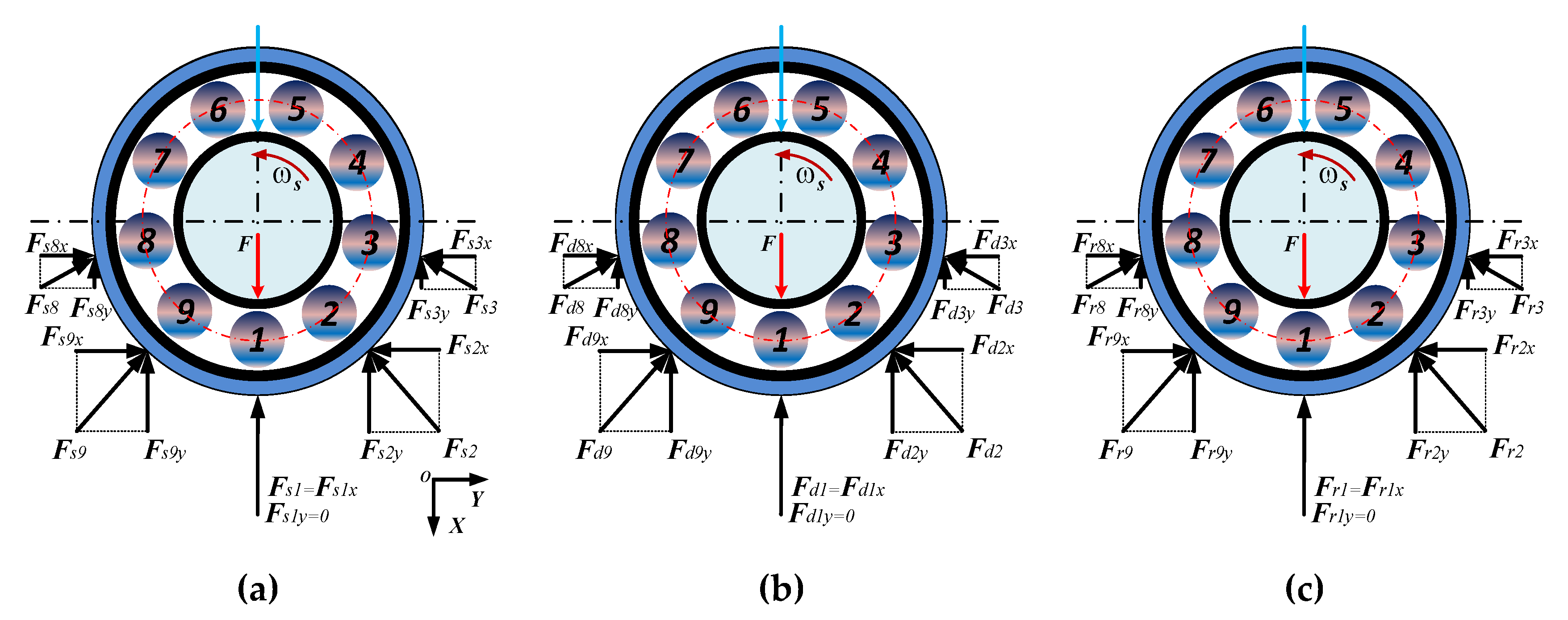
2.2. Dynamic Force Model
2.3. Numerical Simulation Implementation and Analysis
- (1)
- The vibration model is developed for an ideal bearing under perfect operating conditions, i.e., geometric errors and assembly errors are ignored;
- (2)
- The bearing operates under isothermal conditions, i.e., the influence of temperature is not considered;
- (3)
- The lubrication is sufficient and appropriate during the operation at a constant speed, i.e., abnormal lubrication and raceway roughness and waviness are not taken into account;
- (4)
- The motion between raceways and balls is regarded as pure rolling without any sliding and skidding between bearing components;
- (5)
- The sensor is considered as a mass-damping system.
3. Model Verification on a Bearing Test Rig
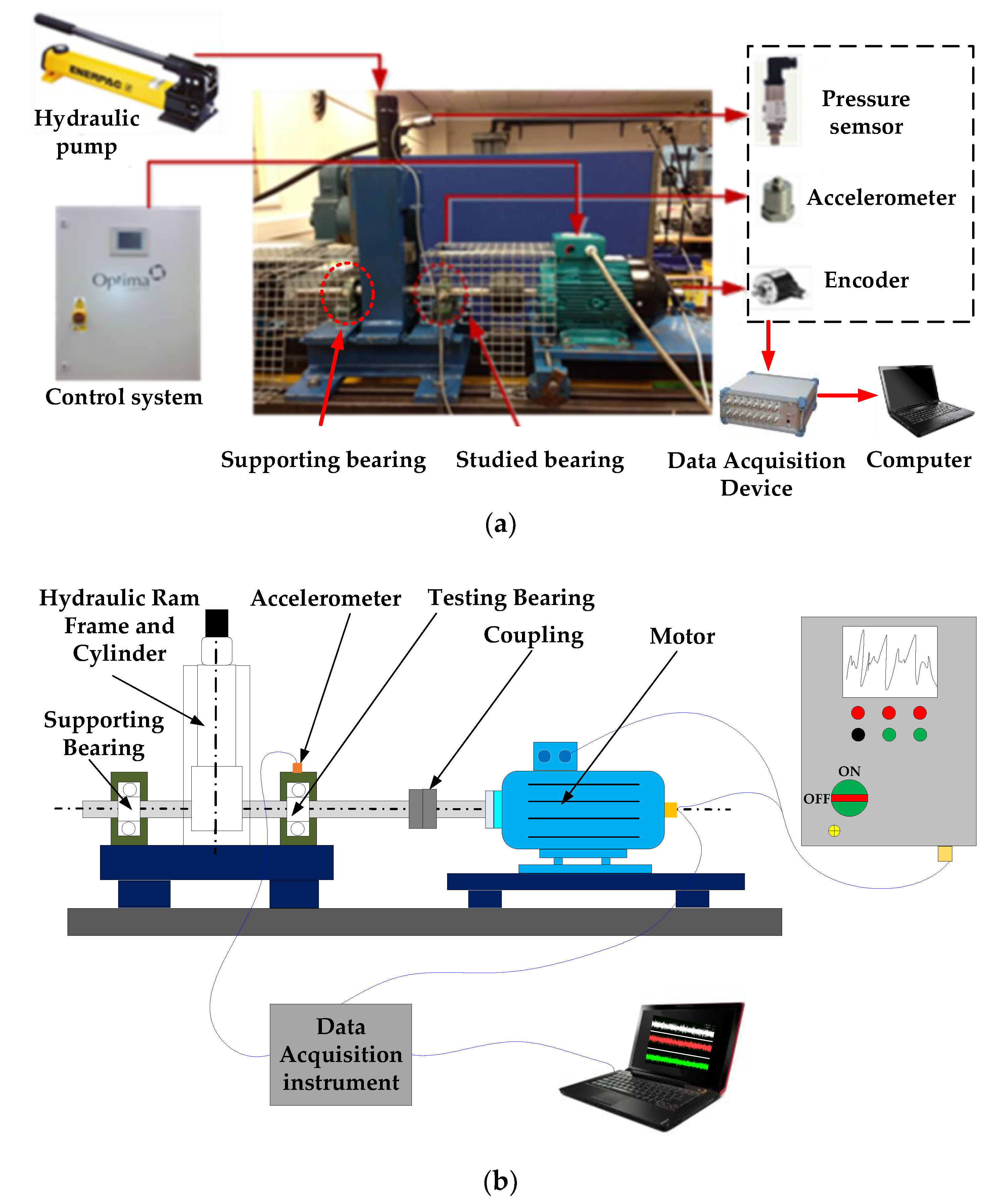
3.1. Bearing Test Rig Setup
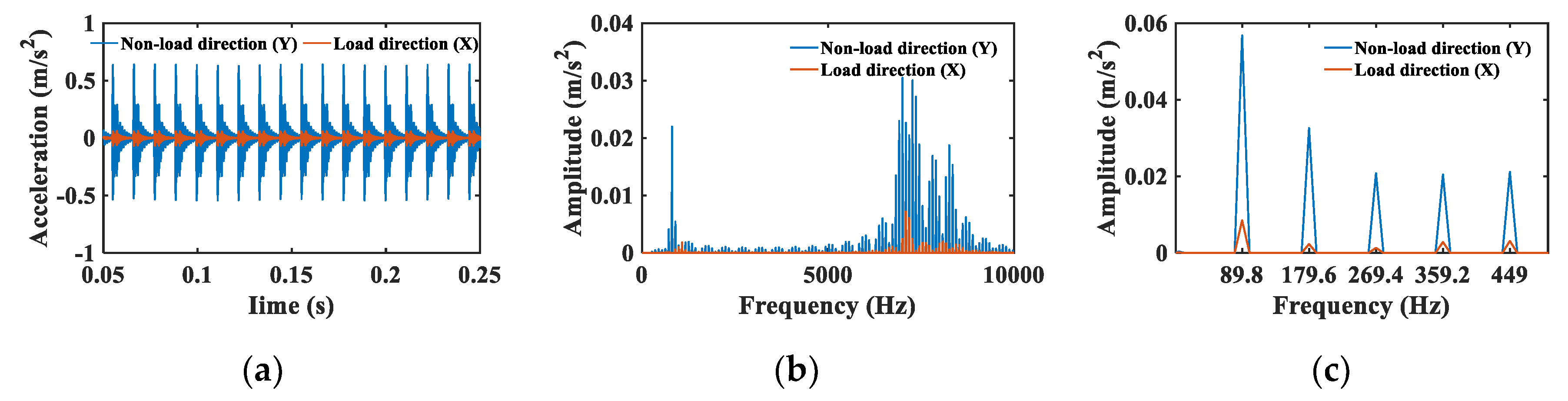
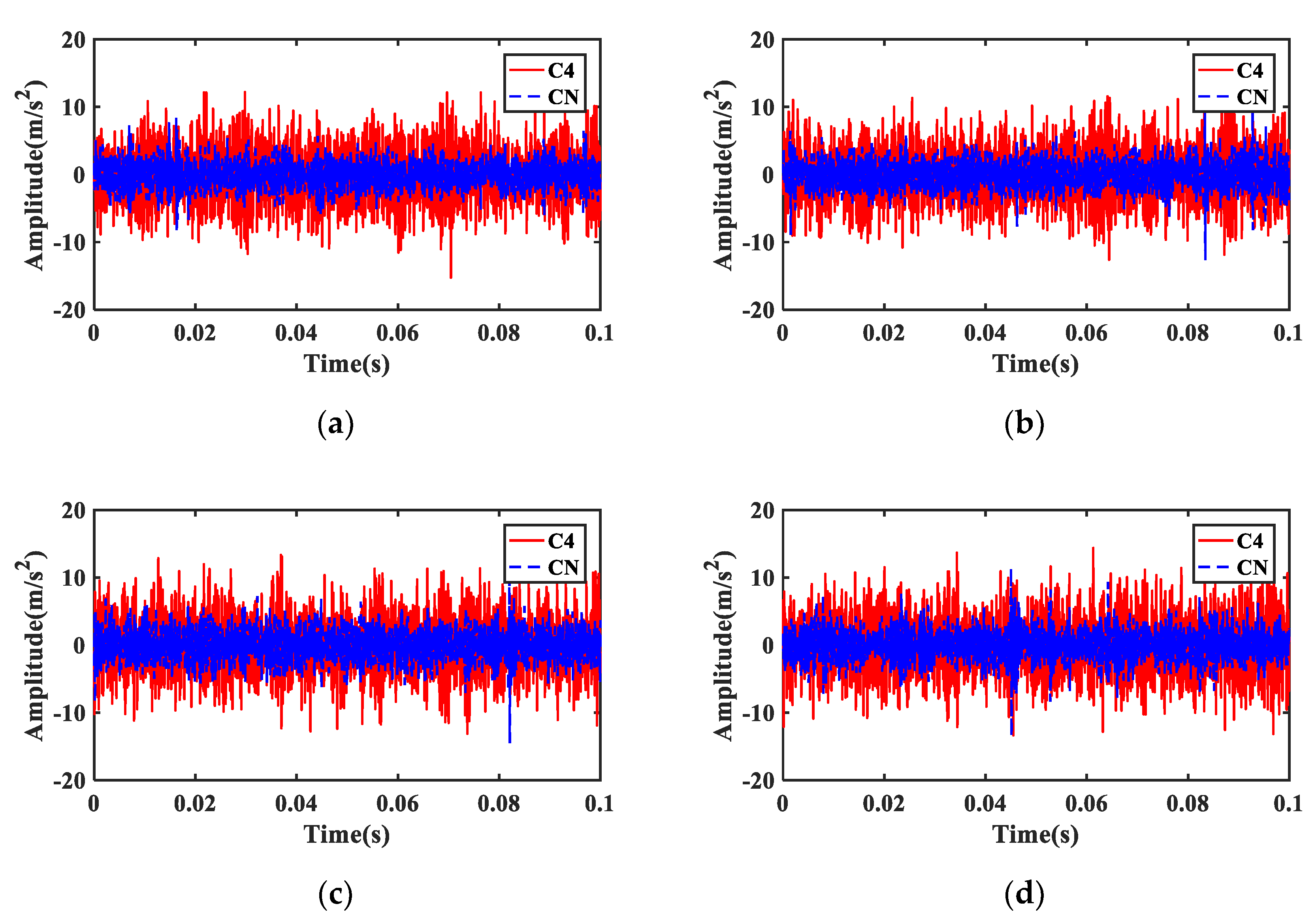
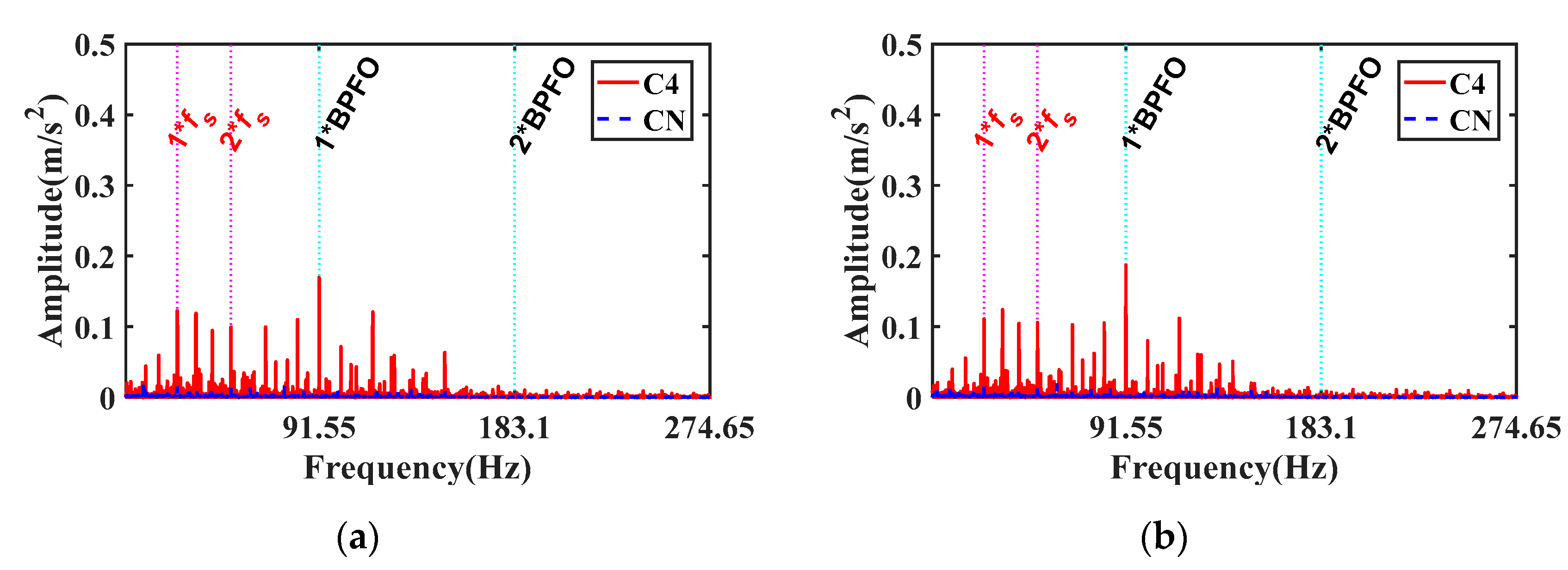
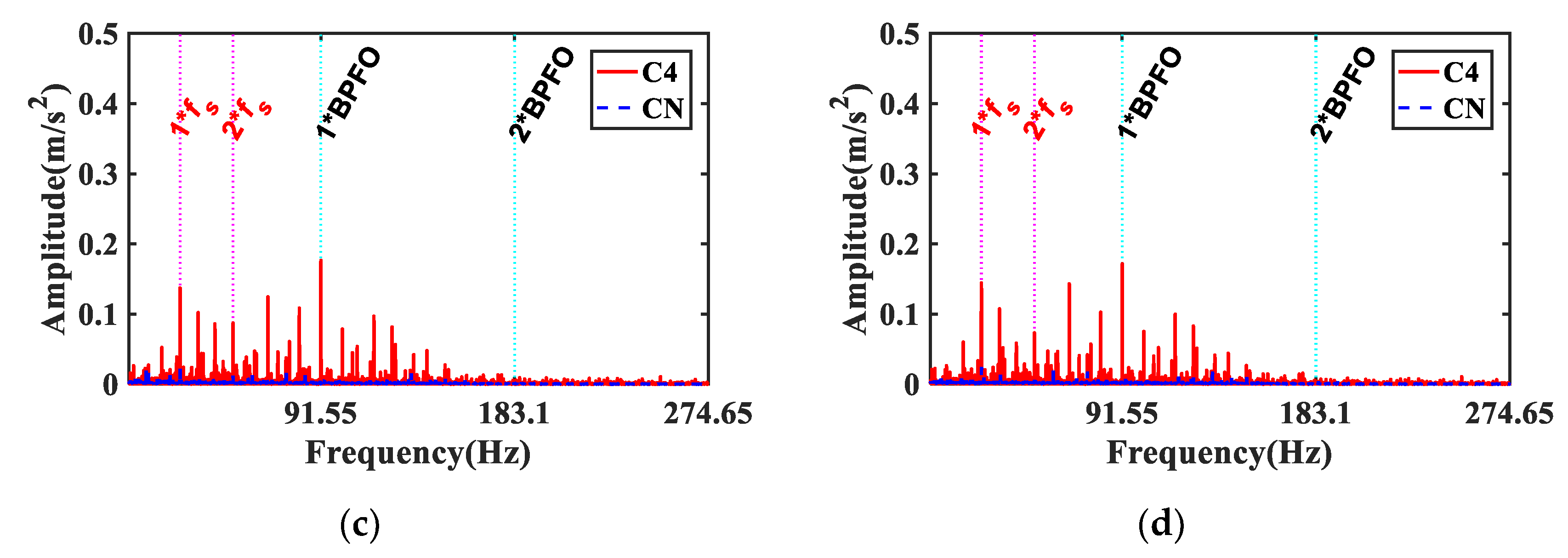
3.2. Model Verfication with Vibration Data
4. Vibration Characteristics for Bearing Clearance Monitoring
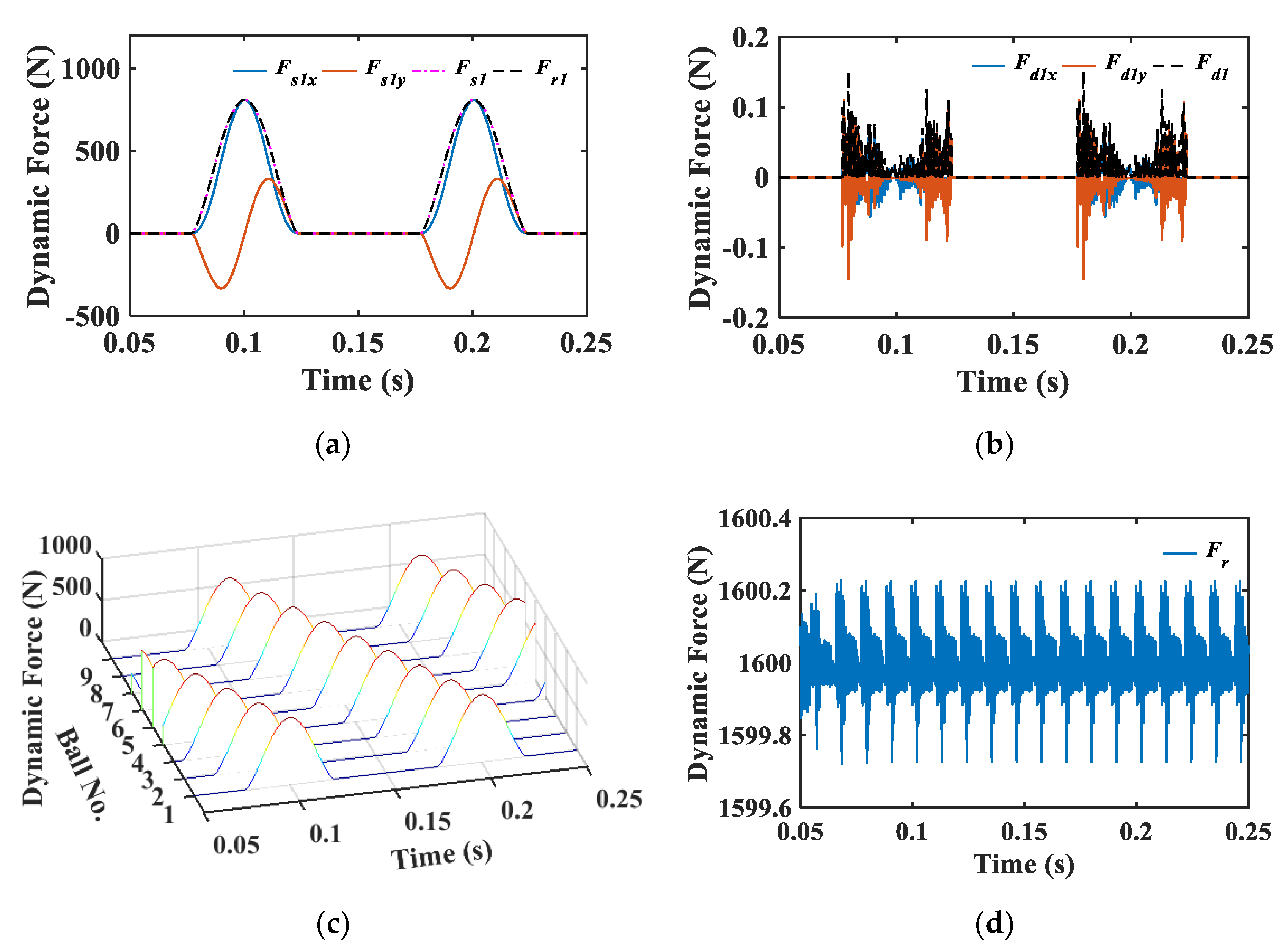
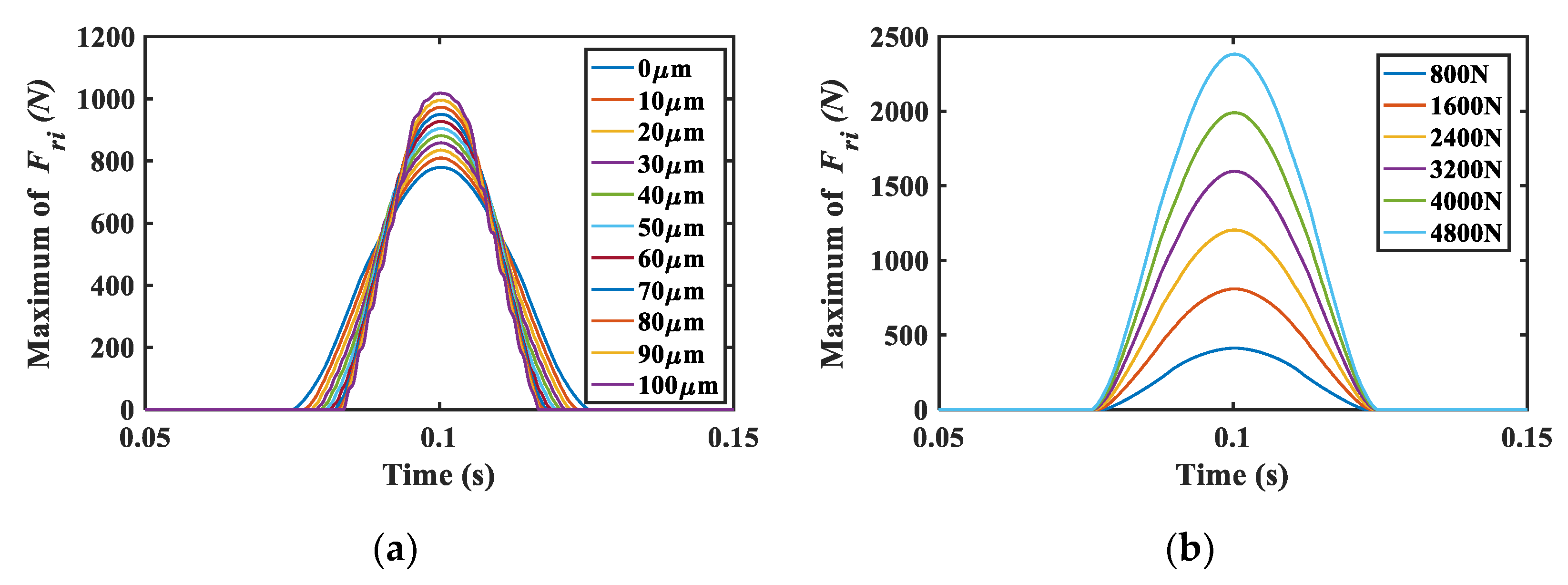
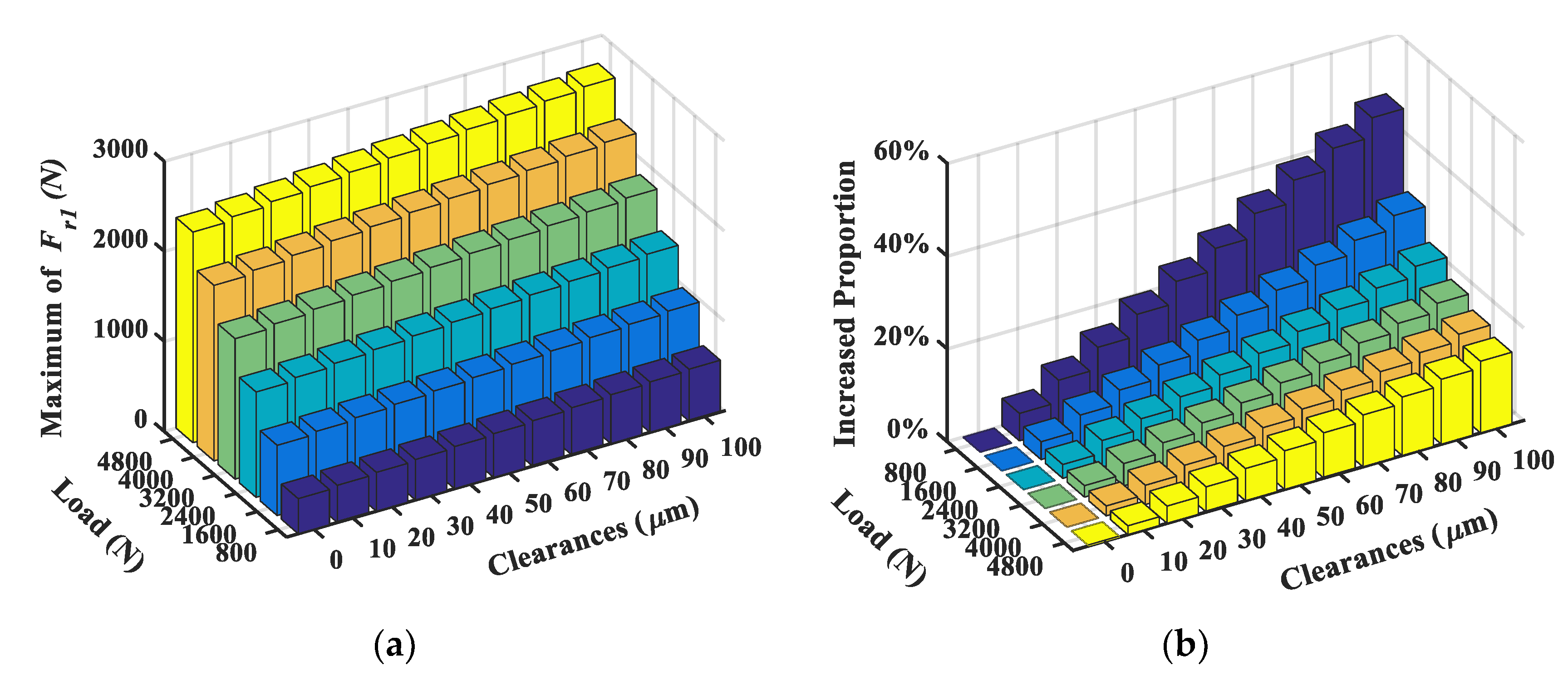
4.1. Dynamic Force Analysis
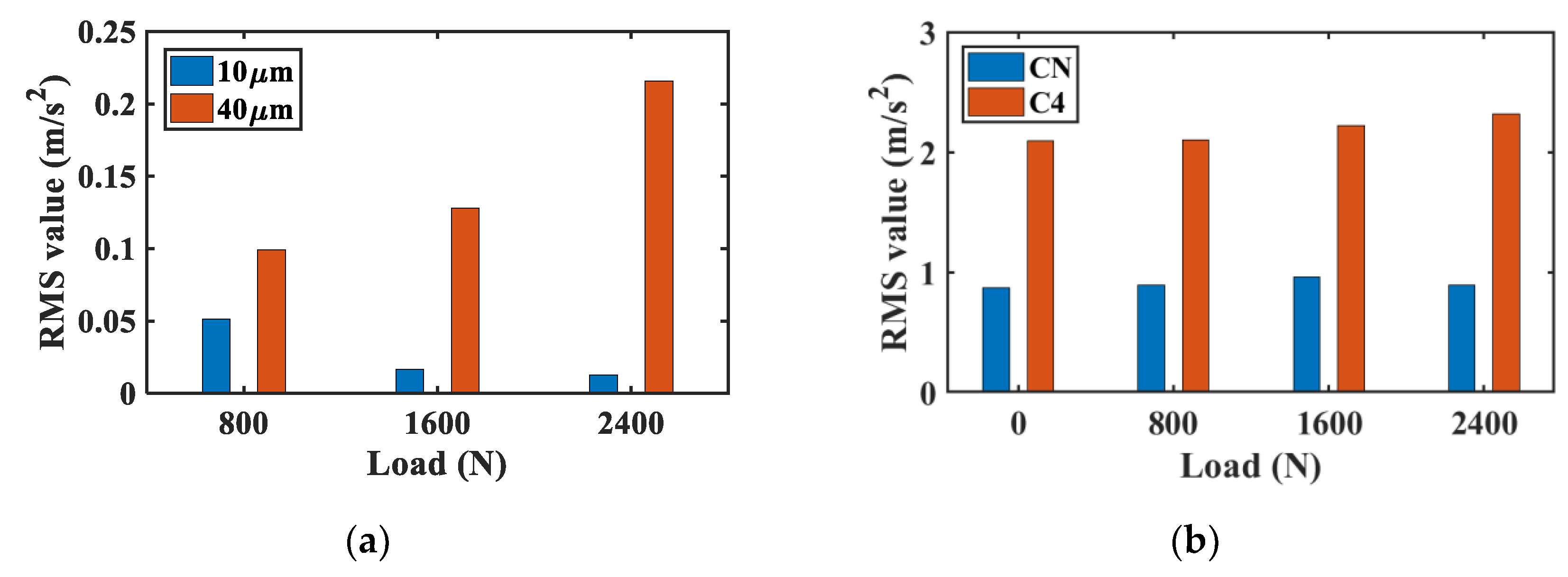
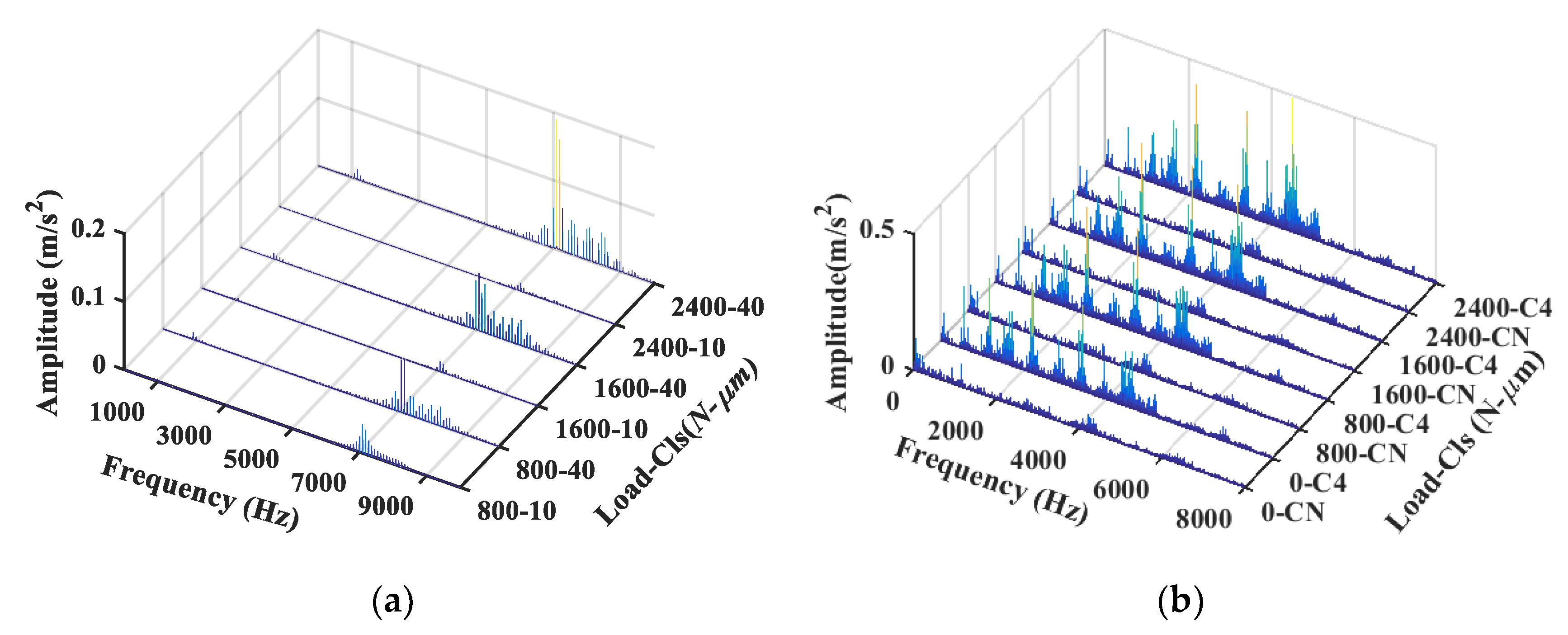
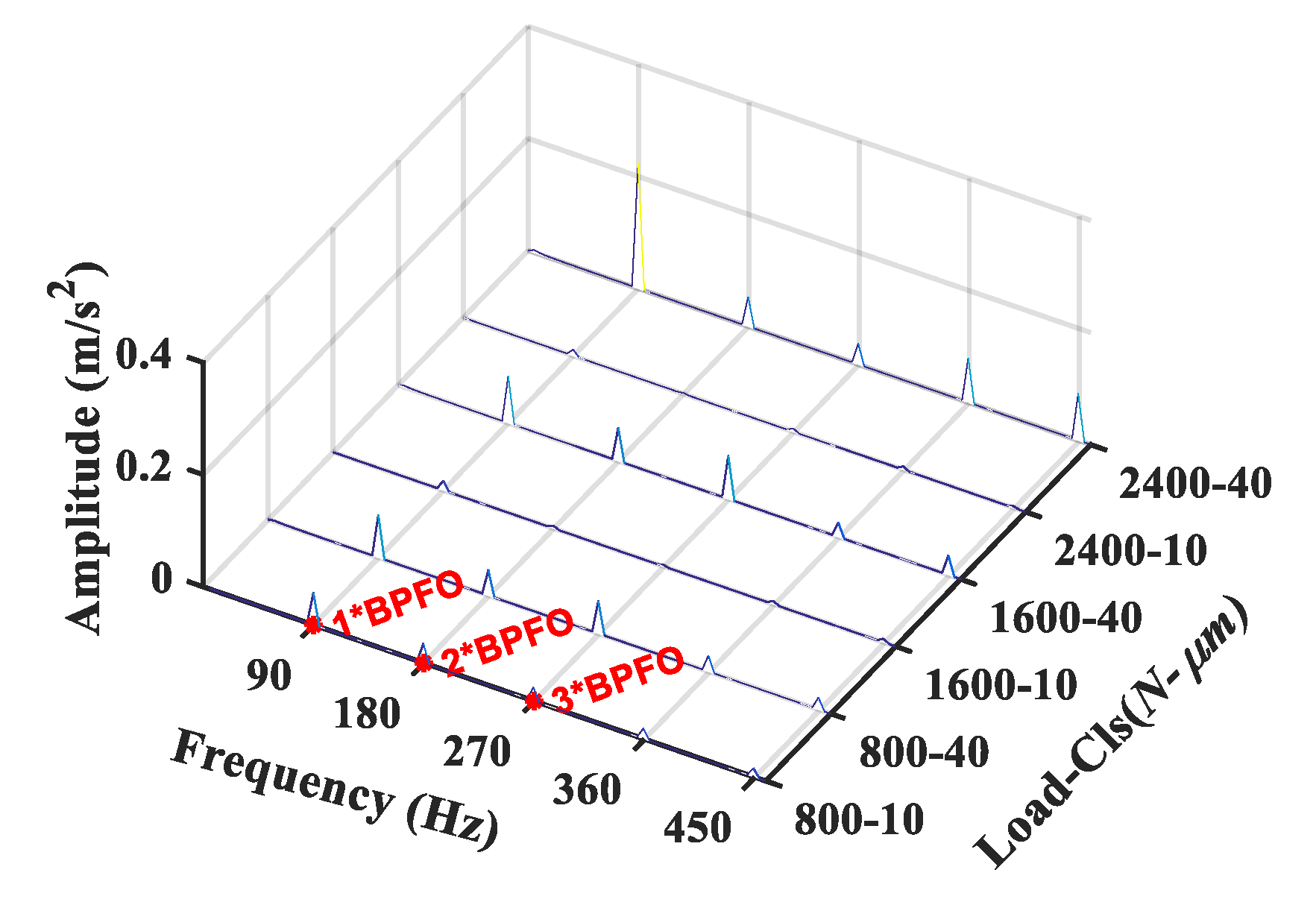
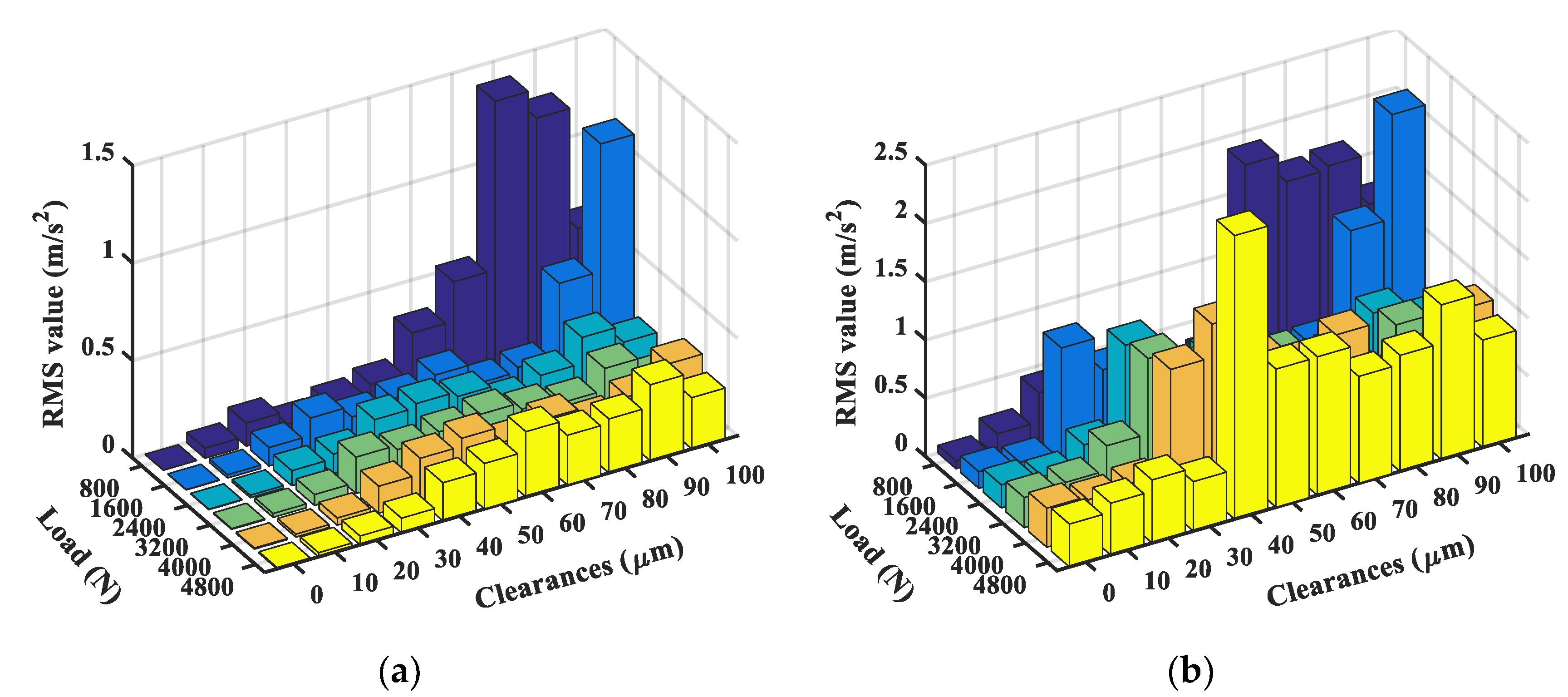
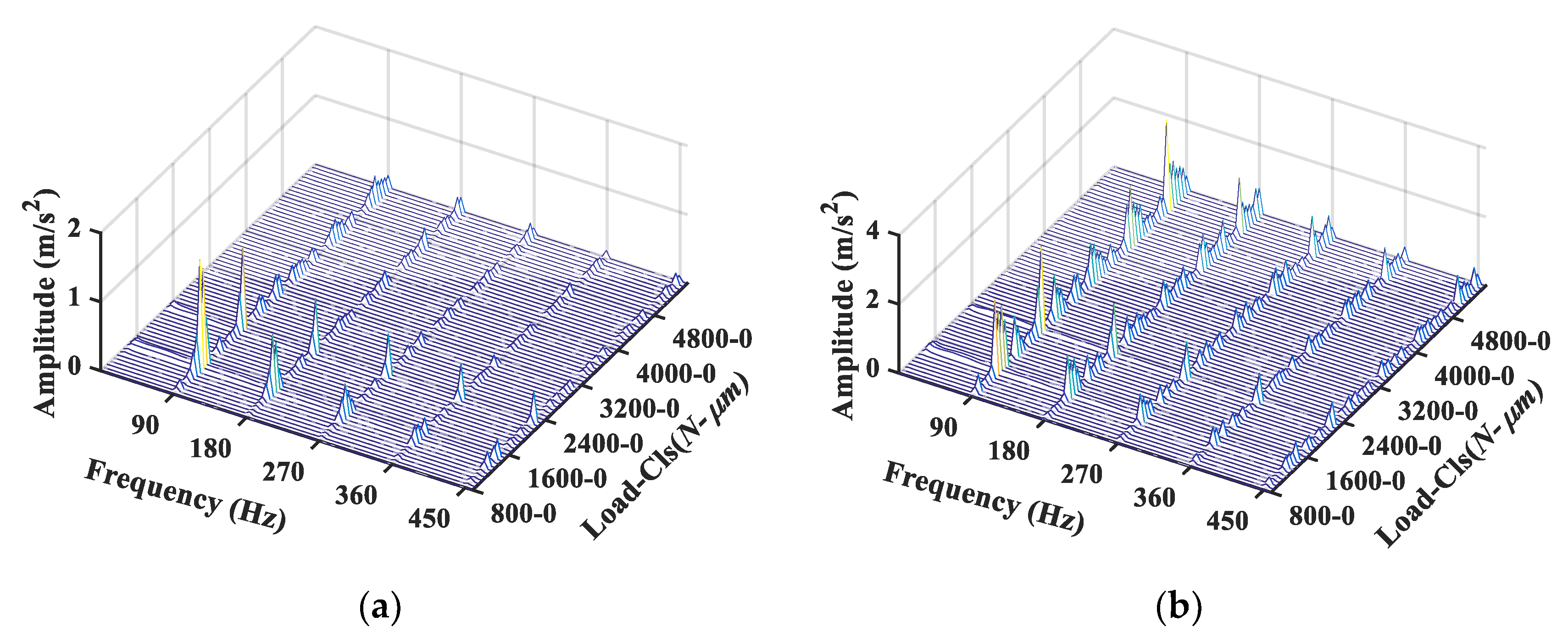
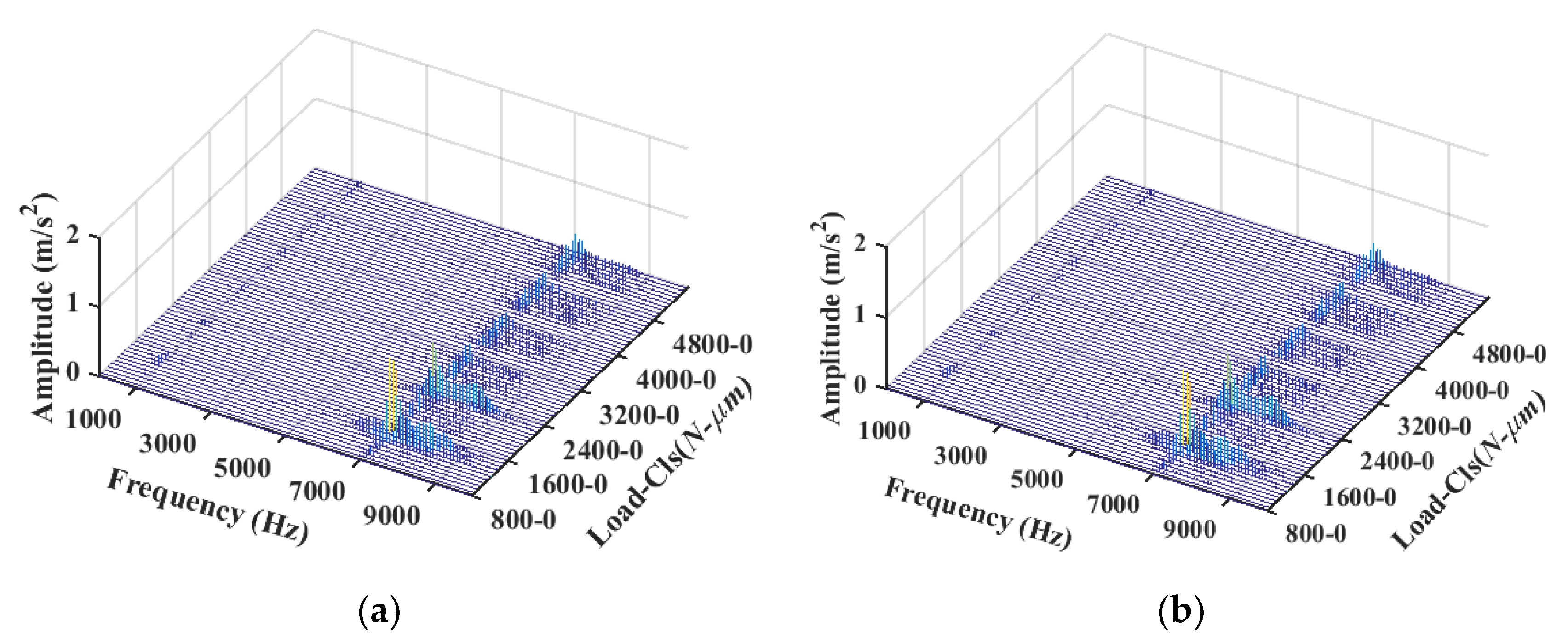
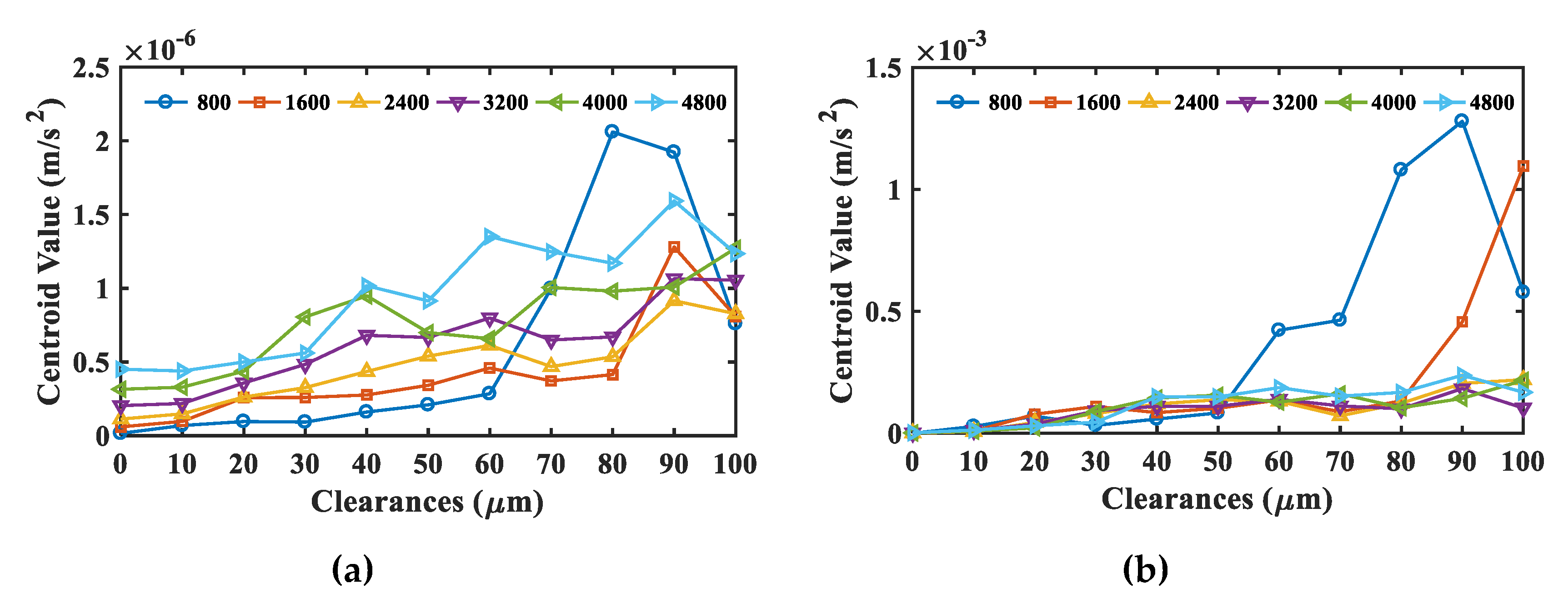
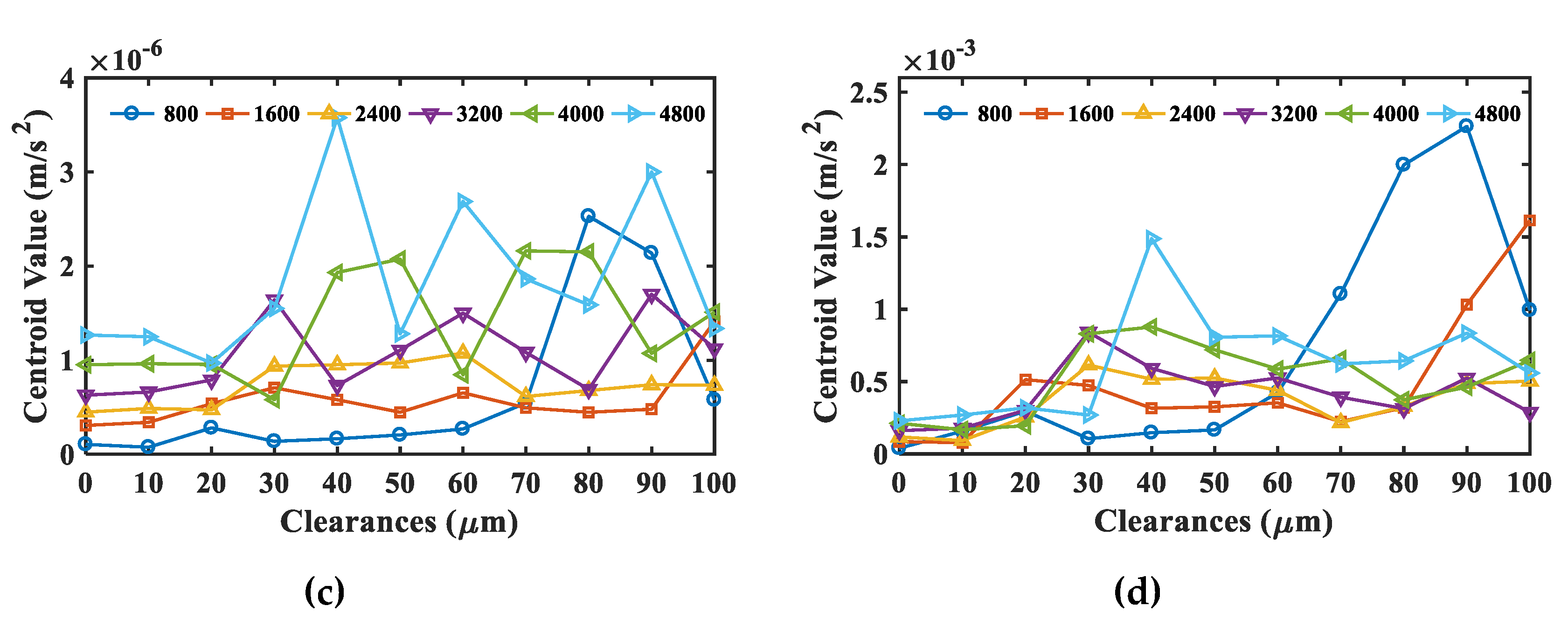
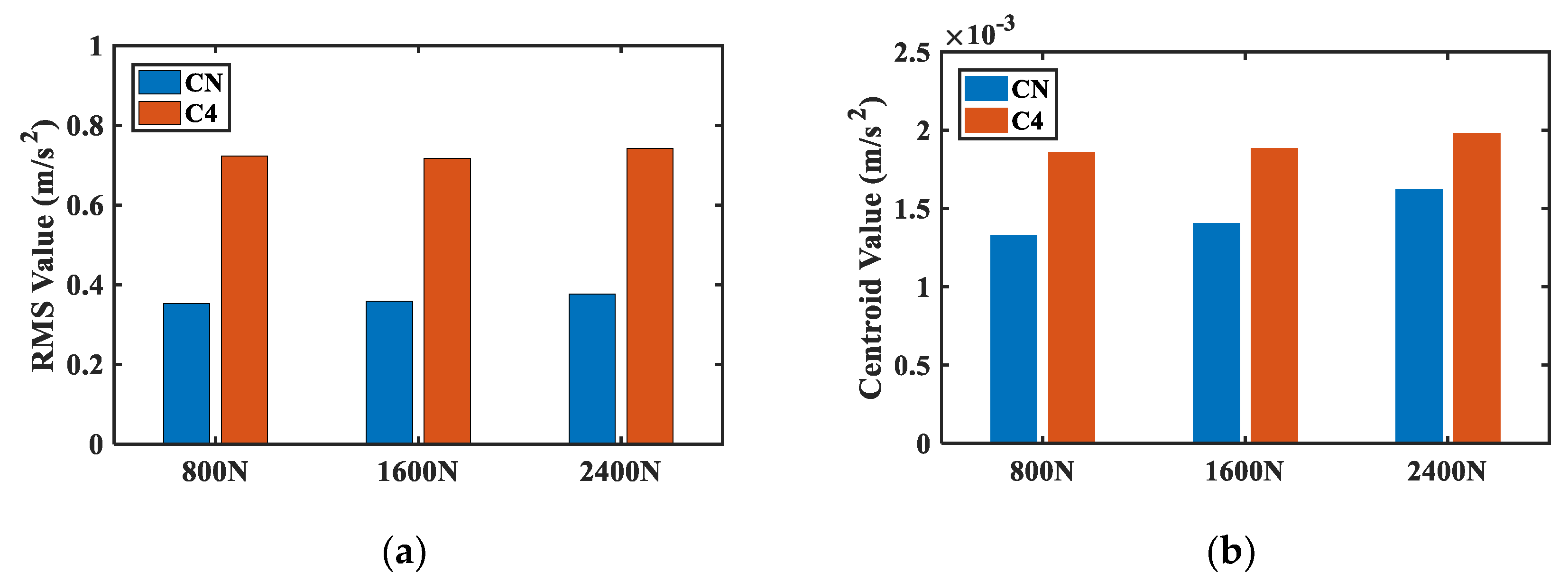
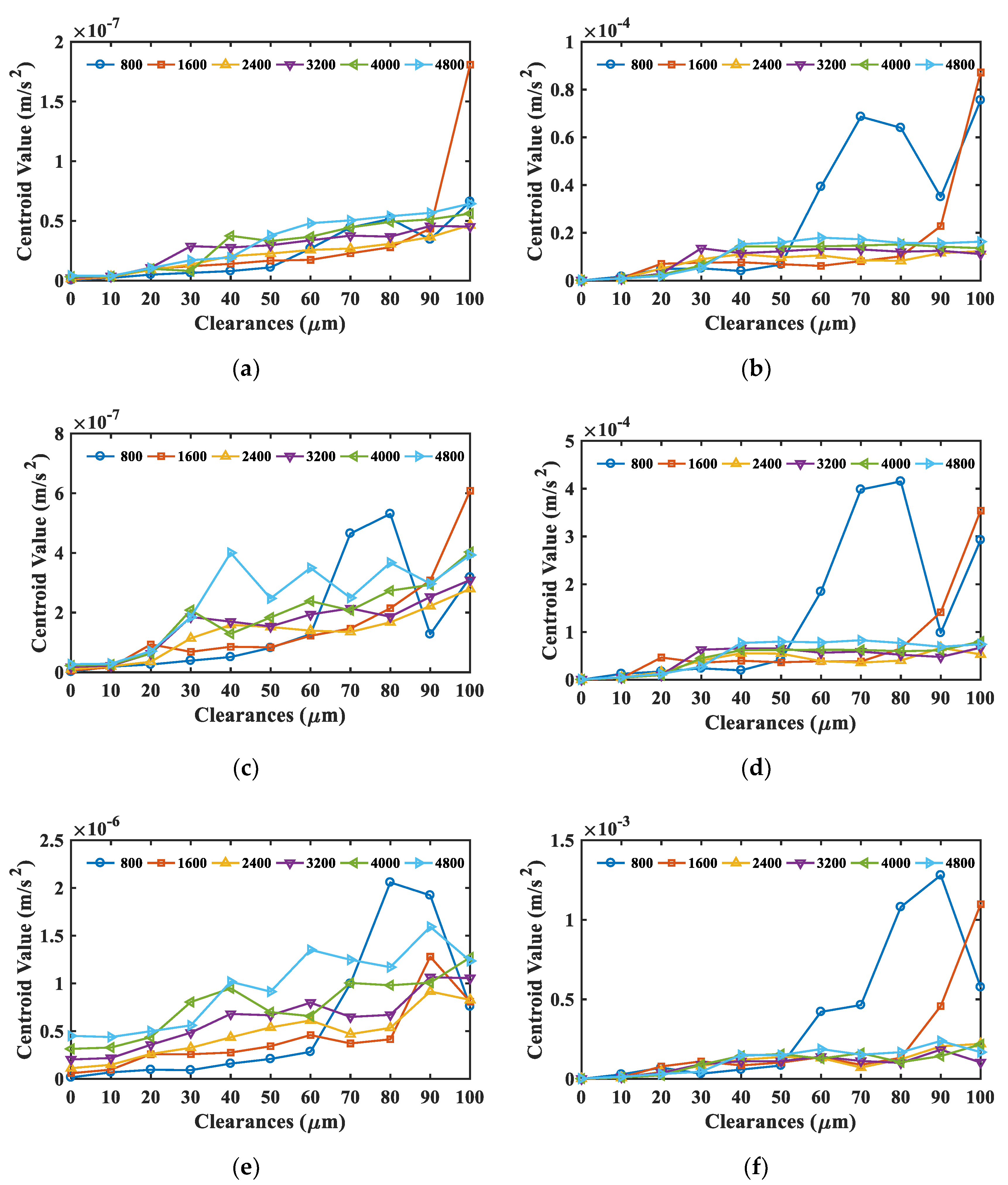
4.2. Bearing Clearance Monitoring
4.3. Influence of Rotational Speed
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, B.; Li, Y.; Wu, X.; Yang, Z. A review of recent advances in wind turbine condition monitoring and fault diagnosis. In Proceedings of the 2009 IEEE Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009. [Google Scholar]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electr. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Zhen, D.; Guo, J.; Xu, Y.; Zhang, H.; Gu, F. A Novel fault detection method for rolling bearings based on non-stationary vibration signature analysis. Sensors 2019, 19, 3994. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, G.; Zhang, Q.; Liu, D.; Jiang, K. Rotating speed isolation and its application to rolling element bearing fault diagnosis under large speed variation conditions. J. Sound. Vib. 2015, 348, 381–396. [Google Scholar] [CrossRef]
- De Azevedo, H.D.M.; Araújo, A.M.; Bouchonneau, N. A review of wind turbine bearing condition monitoring: State of the art and challenges. Renew. Sustain. Energy Rev. 2016, 56, 368–379. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Tse, P.W.; Peng, Y.A.; Yam, R. Wavelet analysis and envelope detection for rolling element bearing fault diagnosis-their effectiveness and flexibilities. J. Vib. Acoust. 2001, 123, 303–310. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Samanta, B.; Al-Balushi, K.R. Artificial neural network based fault diagnostics of rolling element bearings using time-domain features. Mech. Syst. Signal Process. 2003, 17, 317–328. [Google Scholar] [CrossRef]
- Desbazeille, M.; Randall, R.B.; Guillet, F.; El Badaoui, M.; Hoisnard, C. Model-based diagnosis of large diesel engines based on angular speed variations of the crankshaft. Mech. Syst. Signal Process. 2010, 24, 1529–1541. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Qiao, B.; Chen, Q. Basic research on machinery fault diagnostics: Past, present, and future trends. Front. Mech. Eng. 2018, 13, 264–291. [Google Scholar] [CrossRef]
- McFadden, P.D.; Smith, J.D. Model for the vibration produced by a single point defect in a rolling element bearing. J. Sound. Vib. 1984, 96, 69–82. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y.; Zhu, W.D. A new model for the relationship between vibration characteristics caused by the time-varying contact stiffness of a deep groove ball bearing and defect sizes. J. Tribol. 2015, 137, 0311011. [Google Scholar] [CrossRef]
- Tazi, N.; Châtelet, E.; Bouzidi, Y. Using a Hybrid Cost-FMEA Analysis for Wind Turbine Reliability Analysis. Energies 2017, 10, 276. [Google Scholar] [CrossRef]
- Tazi, N.; Châtelet, E.; Bouzidi, Y. Wear analysis of wind turbine bearings. Int. J. Renew. Energy Res. 2017, 7, 2120–2129. [Google Scholar]
- Oswald, F.B.; Zaretsky, E.V.; Poplawski, J.V. Effect of internal clearance on load distribution and life of radially loaded ball and roller bearings. Tribol. Trans. 2012, 55, 245–265. [Google Scholar] [CrossRef]
- D’Amato, R.; Calvo, R.; Ruggiero, A.; Gómez, E. Measurement capabilities for ball bearing wear assessment. Procedia Manuf. 2017, 13, 647–654. [Google Scholar] [CrossRef]
- Halme, J.; Andersson, P. Rolling contact fatigue and wear fundamentals for rolling bearing diagnostics-state of the art. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2010, 224, 377–393. [Google Scholar] [CrossRef]
- Harris, T.A.; Kotzalas, M.N. Advanced Concepts of Bearing Technology: Rolling Bearing Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Yakout, M.; Nassef, M.G.A.; Backar, S. Effect of clearances in rolling element bearings on their dynamic performance, quality and operating life. J. Mech. Sci. Technol. 2019, 33, 2037–2042. [Google Scholar] [CrossRef]
- Ocak, H.; Loparo, K.A.; Discenzo, F.M. Online tracking of bearing wear using wavelet packet decomposition and probabilistic modeling: A method for bearing prognostics. J. Sound. Vib. 2007, 302, 951–961. [Google Scholar] [CrossRef]
- Rehab, I.; Tian, X.; Gu, F.; Ball, A. The influence of rolling bearing clearances on diagnostic signatures based on a numerical simulation and experimental evaluation. Int. J. Hydromechatron. 2018, 1, 16–46. [Google Scholar] [CrossRef]
- Zmarzły, P. Influence of the internal clearance of ball bearings on the vibration level. Eng. Mech. 2018, 2018, 961–964. [Google Scholar]
- Georgiadis, A.; Gong, X.; Meier, N. Vibration analysis based on the spectrum kurtosis for adjustment and monitoring of ball bearing radial clearance. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018. [Google Scholar]
- Meier, N.; Ambrożkiewicz, B.; Georgiadis, A.; Litak, G. Verification of measuring the bearing clearance using kurtosis, recurrences and neural networks and comparison of these approaches. In Proceedings of the IEEE SENSORS, Montreal, ON, Canada, 27–30 October 2019; pp. 1–4. [Google Scholar]
- Wang, J.; Xu, M.; Zhang, C.; Huang, B.; Gu, F. Online Bearing Clearance Monitoring Based on an Accurate Vibration Analysis. Energies 2020, 13, 389. [Google Scholar] [CrossRef]
- Sunnersjö, C.S. Varying compliance vibrations of rolling bearings. J. Sound. Vib. 1978, 58, 363–373. [Google Scholar] [CrossRef]
- Arslan, H.; Aktürk, N. An investigation of rolling element vibrations caused by local defects. J. Tribol. 2008, 130, 041101. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Simulating gear and bearing interactions in the presence of faults: Part I. The combined gear bearing dynamic model and the simulation of localised bearing faults. Mech. Syst. Signal Process. 2008, 22, 1924–1951. [Google Scholar] [CrossRef]
- Xiao, H.; Zhou, X.; Liu, J.; Shao, Y. Vibration transmission and energy dissipation through the gear-shaft-bearing-housing system subjected to impulse force on gear. Measurement 2017, 102, 64–79. [Google Scholar] [CrossRef]
- Liu, J.; Shao, Y. Dynamic modeling for rigid rotor bearing systems with a localized defect considering additional deformations at the sharp edges. J. Sound. Vib. 2017, 398, 84–102. [Google Scholar] [CrossRef]
- Nagatomo, T.; Takahashi, K.; Okamura, Y.; Kigawa, T.; Noguchi, S. Effects of load distribution on life of radial roller bearings. J. Tribol. 2012, 134, 021101. [Google Scholar] [CrossRef]
- Cheng, F.; Qu, L.; Qiao, W. Fault prognosis and remaining useful life prediction of wind turbine gearboxes using current signal analysis. IEEE Trans. Sustain. Energy 2017, 9, 157–167. [Google Scholar] [CrossRef]
- Večeř, P.; Kreidl, M.; Šmíd, R. Condition indicators for gearbox condition monitoring systems. Acta Polytechnica 2005, 45. [Google Scholar] [CrossRef]
- Igba, J.; Alemzadeh, K.; Durugbo, C.; Eiriksson, E.T. Analysing RMS and peak values of vibration signals for condition monitoring of wind turbine gearboxes. Renew. Energy 2016, 91, 90–106. [Google Scholar] [CrossRef]
- Feng, Z.; Liang, M.; Zhang, Y.; Hou, S. Fault diagnosis for wind turbine planetary gearboxes via demodulation analysis based on ensemble empirical mode decomposition and energy separation. Renew. Energy 2012, 47, 112–126. [Google Scholar] [CrossRef]
- Schubert, E.; Wolfe, J.; Tarnopolsky, A. Spectral centroid and timbre in complex, multiple instrumental textures. In Proceedings of the International Conference on Music Perception and Cognition, North Western University, Evanston, IL, USA, 3–7 August 2004. [Google Scholar]
- Melzer, T.; Reiter, M.; Bischof, H. Nonlinear feature extraction using generalized canonical correlation analysis. In International Conference on Artificial Neural Networks; Springer: Heidelberg/Berlin, Germany, 2001. [Google Scholar]
- Widodo, A.; Yang, B.S. Application of nonlinear feature extraction and support vector machines for fault diagnosis of induction motors. Expert Syst. Appl. 2007, 33, 241–250. [Google Scholar] [CrossRef]
- He, Q. Time–frequency manifold for nonlinear feature extraction in machinery fault diagnosis. Mech. Syst. Signal Process. 2013, 35, 200–218. [Google Scholar] [CrossRef]
- Ding, X.; He, Q. Time–frequency manifold sparse reconstruction: A novel method for bearing fault feature extraction. Mech. Syst. Signal Process. 2016, 80, 392–413. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description | Value |
|---|---|---|
| Nominal bore diameter () | 30 | |
| Nominal outside diameter () | 62 | |
| Inner race diameter () | 37.48 | |
| Outer race diameter () | 56.45 | |
| Pitch diameter () | 46.96 | |
| Ball diameter () | 9.485 | |
| Original radial clearance () | 0 | |
| Number of rollers | 9 | |
| Contact angle (˚) | 0 |
| Notation | Description | Value |
|---|---|---|
| Mass of shaft (kg) | 1.32 | |
| Mass of house (kg) | 0.46 | |
| Mass of sensor (kg) | 0.02 | |
| Mass of each ball (kg) | ||
| Stiffness of house (N/m) | ||
| Stiffness of sensor (N/m) | ||
| Damping of house | 939.62 | |
| Damping of sensor | 17.89 |
| Bearing Type | Bearing Class | Clearance (µm) |
|---|---|---|
| 6206 ZZ | CN | 8.33 |
| C4 | 40.86 |
| Bore Diameter d (mm) over Include | C2 (μm) Min Max | CN (μm) Min Max | C3 (μm) Min Max | C4 (μm) Min Max | C5 (μm) Min Max |
|---|---|---|---|---|---|
| --- 2.5 | 0 6 | 4 11 | 10 20 | --- --- | --- --- |
| 2.5 6 | 0 7 | 2 13 | 8 23 | --- --- | --- --- |
| 6 10 | 0 7 | 2 13 | 8 23 | 14 29 | 20 37 |
| 10 18 | 0 9 | 3 18 | 11 25 | 18 33 | 25 45 |
| 18 24 | 0 10 | 5 20 | 13 28 | 20 36 | 28 48 |
| 24 30 | 1 11 | 5 20 | 13 28 | 23 41 | 30 53 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.; Feng, G.; He, Q.; Gu, F.; Ball, A. Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine. Appl. Sci. 2020, 10, 4731. https://doi.org/10.3390/app10144731
Xu M, Feng G, He Q, Gu F, Ball A. Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine. Applied Sciences. 2020; 10(14):4731. https://doi.org/10.3390/app10144731
Chicago/Turabian StyleXu, Minmin, Guojin Feng, Qingbo He, Fengshou Gu, and Andrew Ball. 2020. "Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine" Applied Sciences 10, no. 14: 4731. https://doi.org/10.3390/app10144731
APA StyleXu, M., Feng, G., He, Q., Gu, F., & Ball, A. (2020). Vibration Characteristics of Rolling Element Bearings with Different Radial Clearances for Condition Monitoring of Wind Turbine. Applied Sciences, 10(14), 4731. https://doi.org/10.3390/app10144731