Inspiration for Seismic Diffraction Modelling, Separation, and Velocity in Depth Imaging

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
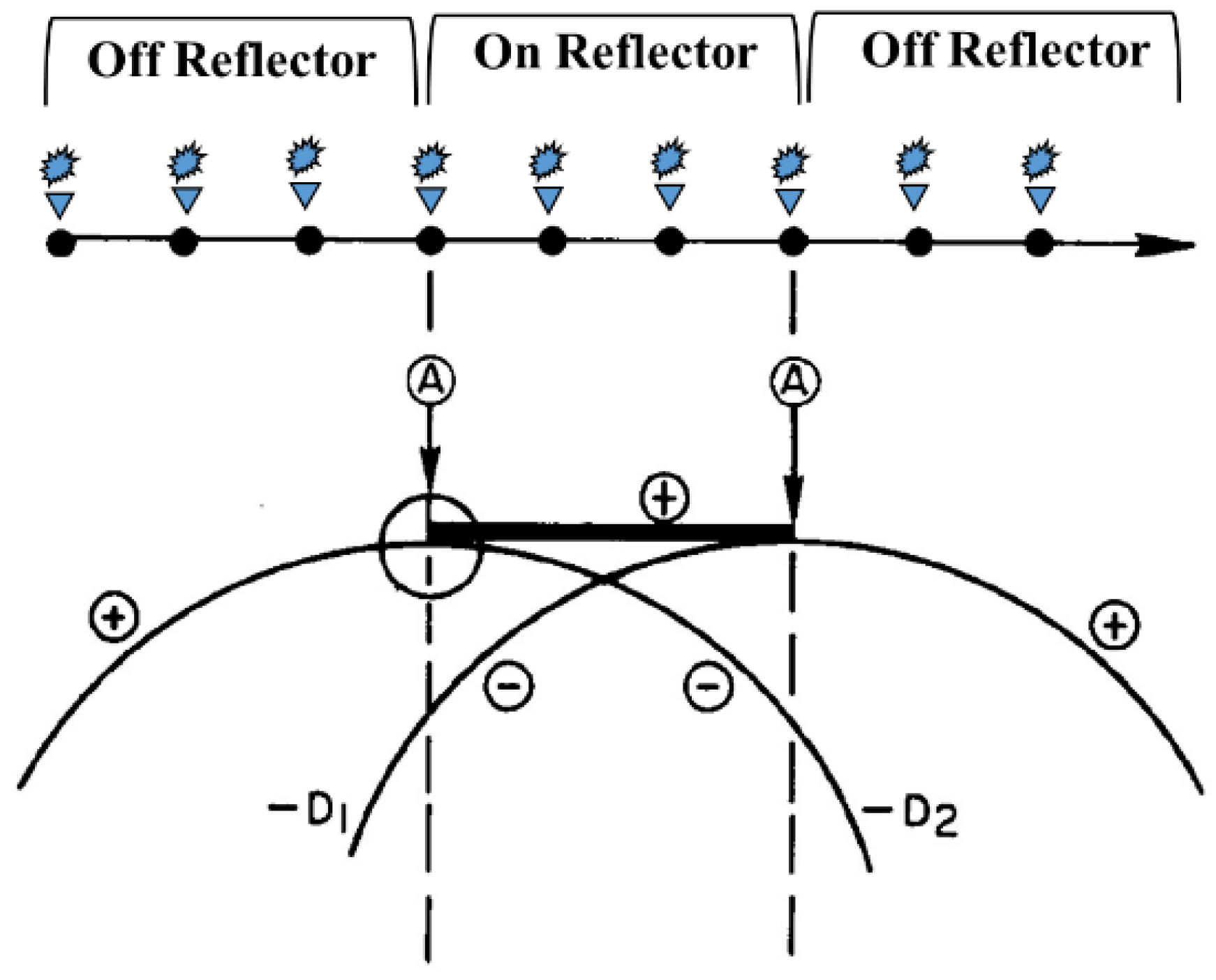
2.1. Diffraction Modelling
2.2. Dip Frequency Filtering
2.3. Diffraction Separation
2.4. Imaging Diffraction
2.5. Regional Geology
- Imaging thin sands, which is often beyond seismic resolution;
- Imaging below gas clouds;
- Karst imaging in carbonate fields;
- Fractured basement imaging and its internal architecture;
- Understanding the wave propagation of ineffective media and related anisotropy;
- Velocity analysis and anisotropy;
- Multiple eliminations;
- Diffraction imaging for small-scale events.
3. Results and Discussion
3.1. Detection of Faults and Fractures
3.2. Generalized Workflow
- ❖
- Generate a velocity model, i.e., the fractured or Marmousi model;
- ❖
- Use finite difference wave propagation to record the seismic behavior in the provided geological model;
- ❖
- In the case of raw data from the field, initial processing is needed to improve the data quality (including sorting, CDP ordering, NMO correction, and stacking, if the data are prestacked);
- ❖
- Apply a Fourier transform to observe the spectrum of amplitude distribution in the frequency wavenumber;
- ❖
- Design the filter based on the dip component of the data in the dt/dx plane;
- ❖
- Convolute the proposed dip frequency filter (DFF) with seismic data to separate the diffraction from reflection;
- ❖
- Apply an inverse Fourier transform to convert the frequency–wavenumber data into the time–distance domain.
3.3. Marmousi Model
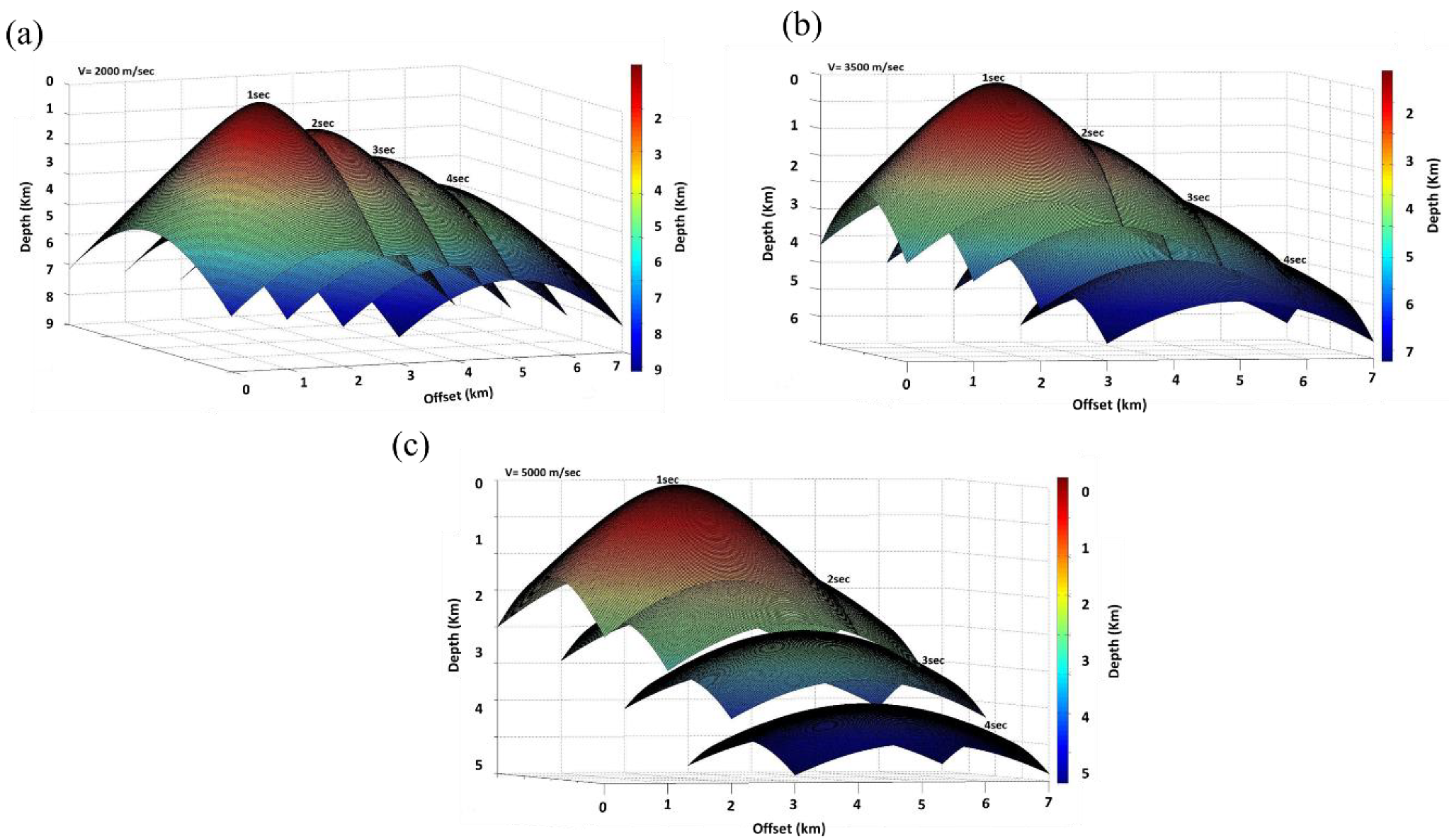
3.4. Importance of Velocity for Seismic Depth Imaging
- (a)
- Gain derivation of wavefield divergence and attenuation;
- (b)
- Multiple eliminations, wavefield continuation, or Radon demultiple processes;
- (c)
- Seismic imaging for structures and reservoirs;
- (d)
- Lithology prediction through Vp/Vs (Velocity of P-wave and S-wave) and elastic inversion;
- (e)
- Pressure prediction;
- (f)
- Porosity prediction from acoustic impedance (AI);
- (g)
- Time-epth (T-X) conversion;
- (h)
- Volumetric calculation;
- (i)
- Net sand map plots.
- (1)
- Semblance analysis;
- (2)
- Hybrid travel time.
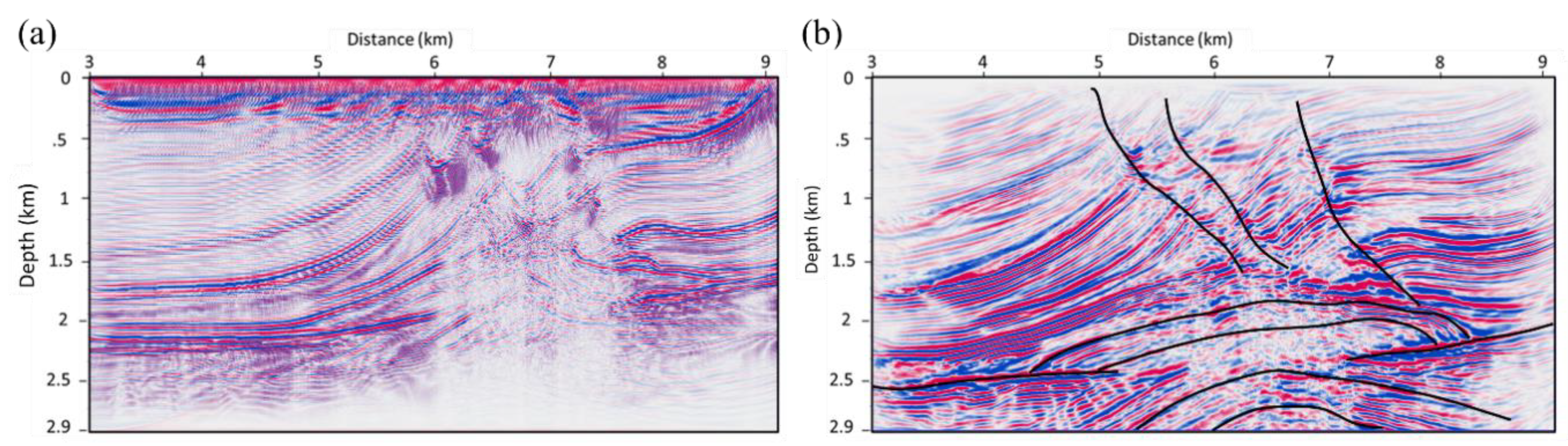
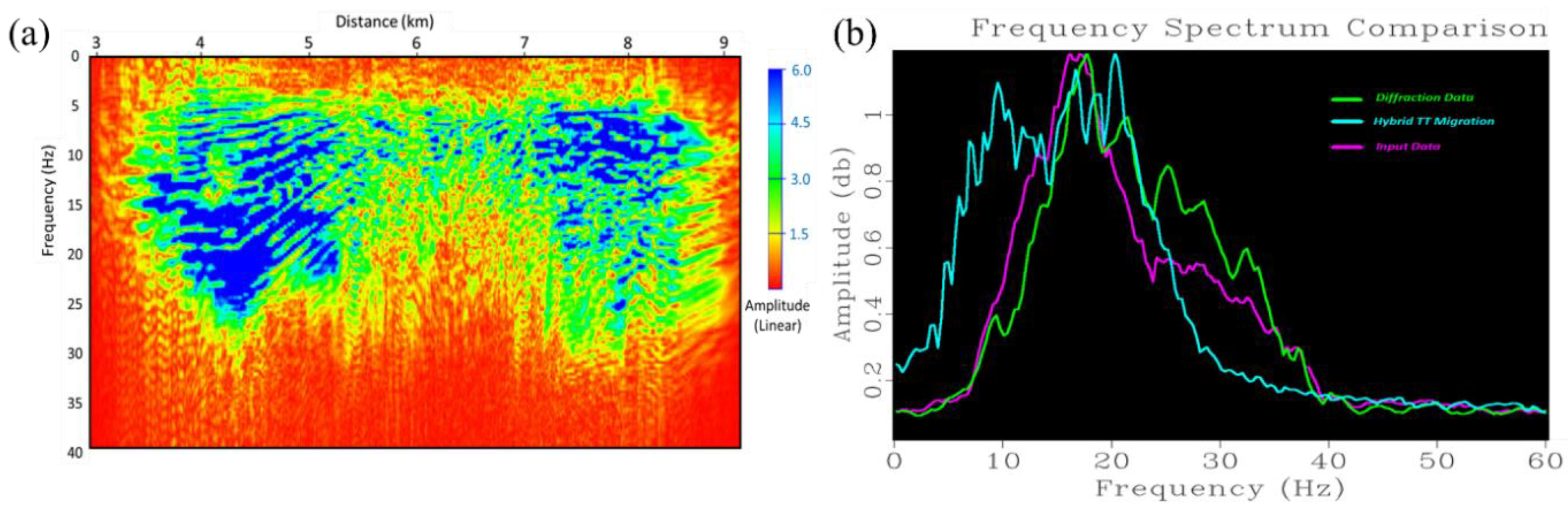
3.5. Diffraction Separation and Imaging using Correct Velocity Model
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fomel, S.; Landa, E.; Taner, M.T. Diffraction imaging for fracture detection. In Proceedings of the 69th EAGE Conference and Exhibition-Workshop Package, London, UK, 11–14 June 2007. [Google Scholar]
- Landa, E. Diffractions–yesterday, today and tomorrow. In Proceedings of the 72nd EAGE Conference & Exhibition Incorporating SPE EUROPEC 2010, Barcelona, Spain, 14–17 Jun 2010. [Google Scholar]
- Bin Waheed, U.; Alkhalifah, T.; Stovas, A. Diffraction traveltime approximation for TI media with an inhomogeneous background. Geophysics 2013, 78, WC103–WC111. [Google Scholar] [CrossRef]
- Coimbra, T.A.; Faccipieri, J.H.; Speglich, J.H.; Gelius, L.-J.; Tygel, M. Enhancement of diffractions in prestack domain by means of a finite-offset double-square-root traveltime. Geophysics 2019, 84, V81–V96. [Google Scholar] [CrossRef]
- Bashir, Y.; Ghosh, D.P.; Janjuhah, H.; Sum, C.W. Diffraction Enhancement Through Pre-Image Processing: Applications to Field Data, Sarawak Basin, East Malaysia. Geosciences 2018, 8, 74. [Google Scholar] [CrossRef]
- Schwarz, B.; Gajewski, D. Accessing the diffracted wavefield by coherent subtraction. Geophys. J. Int. 2017, 211, 45–49. [Google Scholar] [CrossRef]
- Dell, S.; Abakumov, I.; Kashtan, B.; Gajewski, D.; Popovici, A.M.; Fomel, S. Utilizing diffractions in full-wave inversion for a detailed model building. SEG Tech. Program Expand. Abstr. 2017, 2017, 1033–1037. [Google Scholar] [CrossRef]
- Bashir, Y.; Ghosh, D.P.; Sum, C.W. Influence of seismic diffraction for high-resolution imaging: Applications in offshore Malaysia. Acta Geophys. 2018, 66, 305–316. [Google Scholar] [CrossRef]
- Berryhill, J.R. Diffraction response for nonzero separation of source and receiver. Geophysics 1977, 42, 1158–1176. [Google Scholar] [CrossRef]
- Hilterman, F.J. Amplitudes of seismic waves—a quick look. Geophysics 1975, 40, 745–762. [Google Scholar] [CrossRef]
- Bansal, R.; Imhof, M.G. Diffraction enhancement in prestack seismic data. Geophysics 2005, 70, V73–V79. [Google Scholar] [CrossRef]
- Berkovitch, A.; Belfer, I.; Hassin, Y.; Landa, E. Diffraction imaging by multifocusing. Geophysics 2009, 74, WCA75–WCA81. [Google Scholar] [CrossRef]
- Fomel, S. Applications of plane-wave destruction filters. Geophysics 2002, 67, 1946–1960. [Google Scholar] [CrossRef]
- Claerbout, J.F. Earth soundings analysis: Processing versus inversion, vol. Blackwell Scientific Publications: Cambridge, MA, USA, 1992. [Google Scholar]
- Klem-Musatov, K.D.; Hron, F.; Lines, L.R.; Meeder, C.A. Theory of Seismic Diffractions; Society of Exploration Geophysicists: Tulsa, OK, USA, 1994. [Google Scholar]
- Trorey, A.W. A simple theory for seismic diffractions. Geophysics 1970, 35, 762–784. [Google Scholar] [CrossRef]
- Harlan, W.S.; Claerbout, J.F.; Rocca, F. Signal/noise separation and velocity estimation. Geophysics 1984, 49, 1869–1880. [Google Scholar] [CrossRef]
- Landa, E.; Keydar, S. Seismic monitoring of diffraction images for detection of local heterogeneities. Geophysics 1998, 63, 1093–1100. [Google Scholar] [CrossRef]
- Söllner, W.; Yang, W. Diffraction response simulation: A 3D velocity inversion tool. In Proceedings of the SEG Technical Program Expanded Abstracts 2002; Society of Exploration Geophysicists: Tulsa, OK, USA, 2002; pp. 2293–2296. [Google Scholar]
- Li, J.-Y.; Chen, X.; Hao, Z.-J.; Rui, Z.-H. A Study on Multiple Time-Lapse Seismic AVO Inversion. Chin. J. Geophys. 2005, 48, 974–981. [Google Scholar] [CrossRef]
- Fourier, J. Sine and Cosine Series for an Arbitrary Function in Joseph Fourier 1768-1830 Ed. and Annotated by I; Grattan-Guinness MIT Press: Cambridge, MA, USA, 1807. [Google Scholar]
- Birch, K.G. A Spatial Frequency Filter to Remove Zero Frequency. Opt. Acta: Int. J. Opt. 1968, 15, 113–127. [Google Scholar] [CrossRef]
- Ghosh, D.; Halim, M.F.A.; Brewer, M.; Viratno, B.; Darman, N. Geophysical issues and challenges in Malay and adjacent basins from an E & P perspective. Geophysics 2010, 29, 436–449. [Google Scholar] [CrossRef]
- Madon, M. Geological setting of Sarawak. Pet. Geol. Resour. Malays. 1999, 1, 273–290. [Google Scholar]
- Gudmundsson, A. Rock Fractures in Geological Processes by Agust Gudmundsson; Cambridge University Press (CUP): Cambridge, UK, 2009. [Google Scholar]
- Park, R. Foundation of Structural Geology; Informa UK Limited: London, UK, 2013. [Google Scholar]
- Aki, K.; Richards, P.G. Quantative seismology: Theory and methods; Freeman Company, LLC: New York, NY, USA, 1980; Volume 801. [Google Scholar]
- Kadir, M.B. Fractured Basement Exploration Case Study in Malay Basin. In PGCE 2010; Vols. I and II; EAGE: Merida, Mexico, 2010. [Google Scholar] [CrossRef]
- Bashir, Y.; Ghosh, D.; Sum, C. Preservation of Seismic Diffraction to Enhance the Resolution of Seismic Data. Soc. Explor. Geophys. 2017, 2017, 1038–1043. [Google Scholar] [CrossRef]
- Rawlinson, N.; Hauser, J.; Sambridge, M. Seismic ray tracing and wavefront tracking in laterally heterogeneous media. Adv. Geophys. 2008, 49, 203–273. [Google Scholar] [CrossRef]
- Fomel, S. Traveltime computation with the linearized eikonal equation. SEP 1997, 94, 123–131. [Google Scholar]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bashir, Y.; Mohd Muztaza, N.; Moussavi Alashloo, S.Y.; Ali, S.H.; Prasad Ghosh, D. Inspiration for Seismic Diffraction Modelling, Separation, and Velocity in Depth Imaging. Appl. Sci. 2020, 10, 4391. https://doi.org/10.3390/app10124391
Bashir Y, Mohd Muztaza N, Moussavi Alashloo SY, Ali SH, Prasad Ghosh D. Inspiration for Seismic Diffraction Modelling, Separation, and Velocity in Depth Imaging. Applied Sciences. 2020; 10(12):4391. https://doi.org/10.3390/app10124391
Chicago/Turabian StyleBashir, Yasir, Nordiana Mohd Muztaza, Seyed Yaser Moussavi Alashloo, Syed Haroon Ali, and Deva Prasad Ghosh. 2020. "Inspiration for Seismic Diffraction Modelling, Separation, and Velocity in Depth Imaging" Applied Sciences 10, no. 12: 4391. https://doi.org/10.3390/app10124391
APA StyleBashir, Y., Mohd Muztaza, N., Moussavi Alashloo, S. Y., Ali, S. H., & Prasad Ghosh, D. (2020). Inspiration for Seismic Diffraction Modelling, Separation, and Velocity in Depth Imaging. Applied Sciences, 10(12), 4391. https://doi.org/10.3390/app10124391