1. Introduction
Recently, the development of Vehicular Ad Hoc Networks (VANETs) has been accelerated in order to support accident prevention and the safety of vehicle drivers. The number of vehicles continues to increase worldwide, and millions of people are killed or injured by fatal accidents every year [
1]. In spite of speed regulations and safety sign boards installed around the roads, technological developments in intelligent vehicle communication networks are essential for accident prevention and the safety of drivers. VANET is a form of Mobile Ad Hoc Network (MANET), but it differs from MANET in that the network topology of VANET dynamically changes, link quality is usually unstable due to the high mobility of a vehicle, there are various types of road patterns, sufficient energy and storage are supported for mobile devices installed in a vehicle, and various quality of service (QoS) are required for VANET services [
2]. The applications for VANET can be divided into the following three services: safety services, traffic management, and user-oriented services. Safety services require special requirements of QoS, such as bounded transmission delays and low access delays, both of which are mandatory to offer the highest level of user safety. On the other hand, traffic management services are required to be provided according to vehicle density and data traffic load, and user-oriented services need a high bandwidth. As such, from the perspective of the various requirements of VANET services, medium access control (MAC) plays an important role in VANET. In particular, it is noticed that, from the perspective of safety services, MAC should be able to periodically broadcast a safety-related message that includes useful information such as vehicle accident alerts and road conditions [
3].
Wireless Access in Vehicular Environment (WAVE) based on IEEE 802.11p and IEEE 1609 standards is a representative standardization study of Intelligent Transport Systems (ITSs) using VANET technologies, which is designed to be suited for the characteristics of vehicles such as high mobility and short communications time. WAVE is based on competition-based resource allocation that provides priority-based access using both EDCA (Enhanced Distributed Channel Access) and Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA). The contention-based resource allocation scheme can guarantee low data transmission delay and high user QoS when traffic density is low. However, if offered traffic load and the mobility of the terminal is high, collision probability increases. Accordingly, the data transmission delay increases and the user QoS deteriorates, so that it is not possible to effectively prevent the accident in the VANET environment.
To overcome the shortcomings of IEEE 802.11p and facilitate efficient communication in VANET, Time Division Multiple Access (TDMA)-based contention-free MAC protocols have been proposed. There are two types of TDMA-based MAC protocols for VANET systems; distributed TDMA and centralized TDMA. In distributed TDMA, each vehicle allocates and manages its own resources and communication with 1-hop neighbors [
4]. In contrast, in centralized TDMA, the resource allocation/management of each vehicle is managed by a roadside unit (RSU) or a central coordinator [
5,
6]. However, vehicles traveling at high speed have short dwelling times to stay within the coverage of an RSU, which results in frequent resource collisions. In addition, to support seamless communication for fast moving vehicles, the number of RSUs installed per unit-area increases, and consequently, there are disadvantages of mutual interference between RSUs and collision of resource allocation by hidden nodes in the cluster.
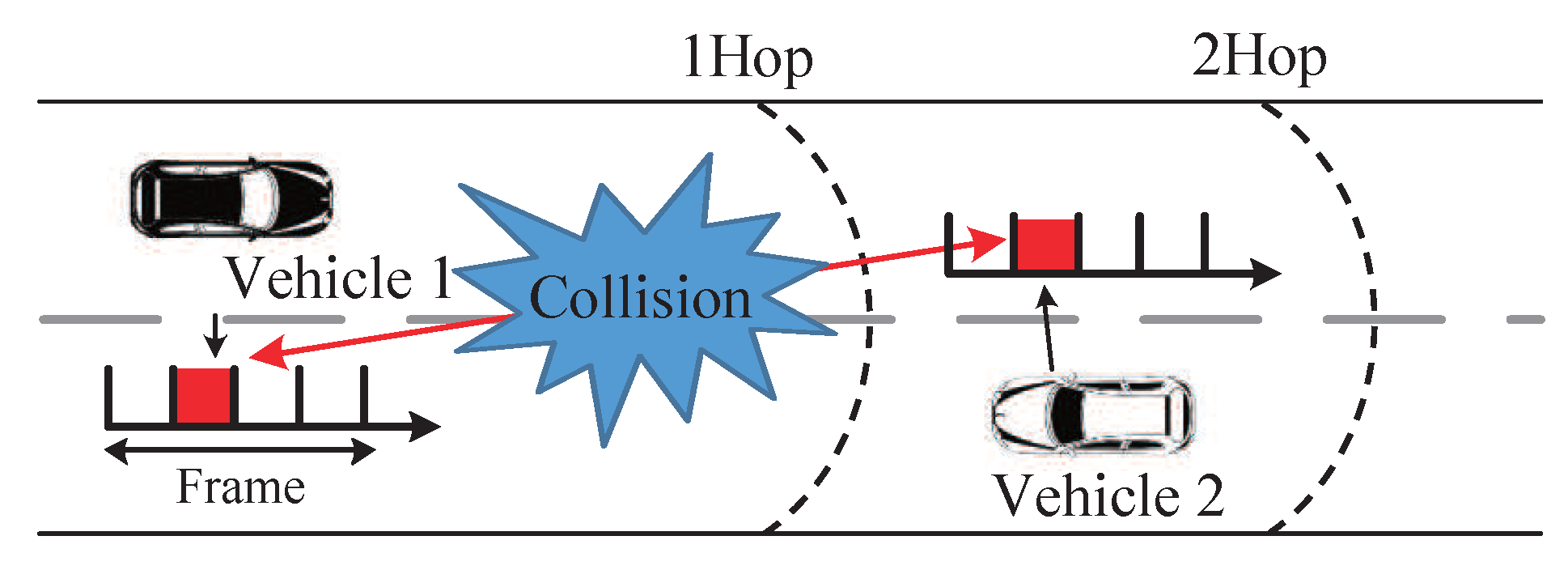
In a TDMA-based VANET system, a frame is usually divided into a control channel and a service channel. Each vehicle generates and transmits a safety message including vehicle information, and this message is periodically delivered to 1-hop neighbor vehicles via the control channel. The service channel is used to transmit non-secure messages such as video, audio, and emergency messages. A resource collision in the control channel affects the QoS of the application provided by the service channel of each vehicle. Specifically, in a TDMA-based VANET protocol, there are two kinds of collisions. First, an access collision occurs when multiple vehicles within a 2-hop communication range attempt to acquire the same available time-slot at the same time, as shown in
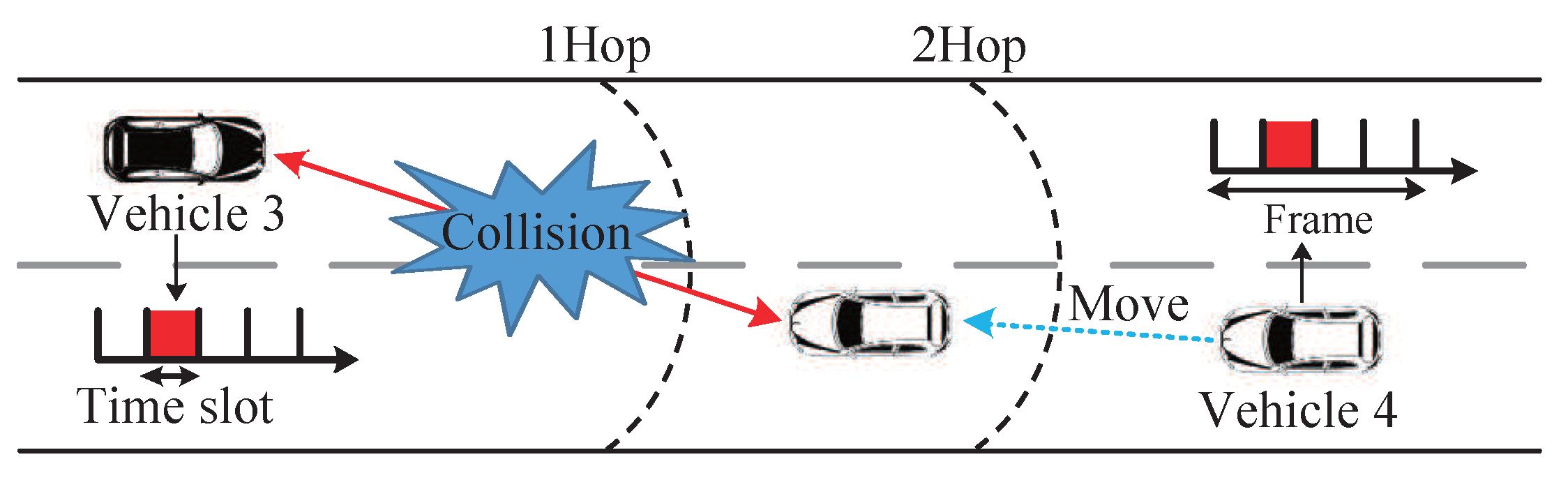
Figure 1. Second, a merging collision occurs when multiple vehicles using the same time-slot get close to each other within a 2-hop communication range due to the mobility of a vehicle. For example, as in
Figure 2, suppose that vehicle 3 and vehicle 4 occupy the second time-slot of the frame. At first, since the two vehicles are more than two hops away from each other, there is no resource conflict. However, the two vehicles are moving towards each other, which will result in a merging collision in the near future.
In this paper, we propose a prediction-based collision avoidance algorithm in VANET. The proposed algorithm is designed to recognize the existence of vehicles far away more than 2 hops and the collision probability of vehicles more than 2 hops away are effectively predicted in the proposed algorithm by using the vector-based prediction model. Because the proposed algorithm is based on the vector mobility of a vehicle, it has the advantage of predicting vehicle movements against other protocols, which enables the proposed algorithm to enhance the performance of collision rate compared to other direction-based algorithms.
The remainder of this paper is organized as follows.
Section 2 explains related works on representative distributed TDMA-based MAC protocols VANET.
Section 3 explains the operational procedure, mobility model, and frame/message structures of the proposed model.
Section 4 provides the analysis of access/merging collision probabilities under the proposed model. In
Section 5, we evaluate the performance of the proposed algorithm and compare its performance with those of other collision avoidance methods. We conclude in
Section 6.
2. Related Works
In a TDMA-based VANET protocol, each vehicle can occupy more than one time-slot per frame; as such, it provides the following advantages over the competition-based IEEE 802.11p standard [
3].
Equal access to the channel for all vehicle nodes.
Efficient channel utilization without collisions.
High reliability of communications.
Deterministic access time even for high traffic loads.
QoS for real-time applications.
In VANET environments, the network topology changes frequently because vehicles are moving at various speeds. Therefore, a variety of distributed TDMA-based MAC protocols have been proposed considering the advantages of TDMA and the characteristics of VANET. AD HOC Medium Access Control (ADHOC MAC) is a basic distributed TDMA-based MAC protocol designed to provide efficient and reliable data transmission in VANET environments [
7]. As shown in
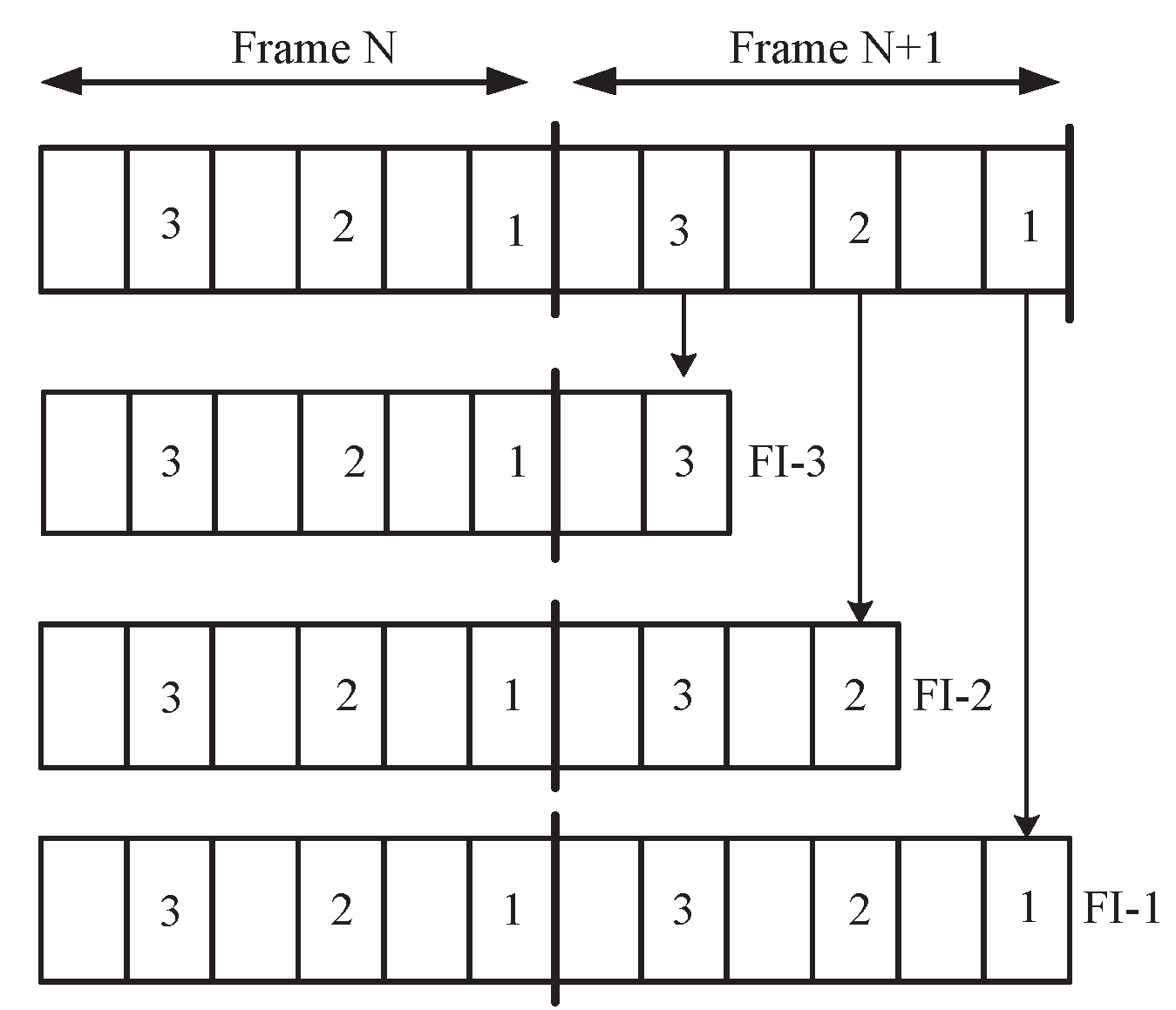
Figure 3, each vehicle periodically generates and broadcasts an FI (frame information) message including information about its own 1-hop neighbors and its own time-slot allocation. Because a vehicle receiving the FI message recognizes the neighbors of the vehicle broadcasting the FI message, all vehicles can obtain information about the existence and resource allocation status of 2-hop neighbor vehicles. A new vehicle entering the network listens to the channels of each frame to obtain the unused time-slot information and selects an available time-slot for transmitting data in the next frame based on this information. If the vehicle successfully secures the time-slot, it will continue to use the same time-slot until a collision occurs or the connection is released. However, ADHOC MAC has disadvantages in that it does not take into consideration the moving direction and speed of the vehicle.
Vehicular Ad Hoc Network MAC (VeMAC) is a distributed TDMA-based VANET protocol that improves on the disadvantages of ADHOC MAC by considering the moving direction of a vehicle [
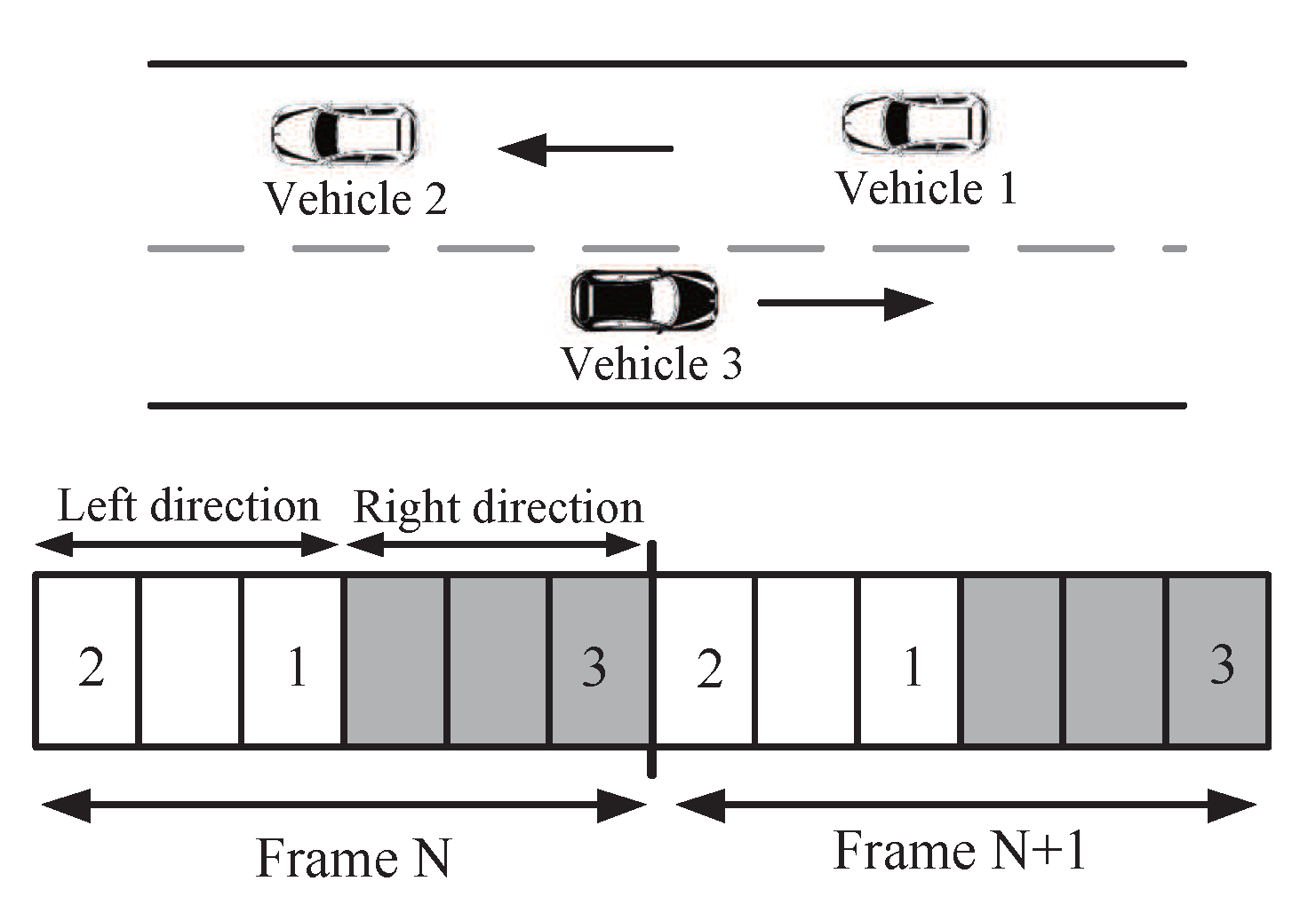
8]. Each vehicle, like the ADHOC MAC, broadcasts an FI message to its 1-hop neighbor vehicles. All vehicles can obtain information about the presence and resource allocation status of 2-hop neighbor vehicles. In VeMAC, each frame is evenly divided considering the direction of the vehicles. As shown in
Figure 4, a frame is divided into two sub-frames. A vehicle traveling to the left occupies the left direction time-slot, and a vehicle traveling to the right occupies the right time-slot. Each vehicle may occupy a time-slot in other directions if there is no remaining time-slot. Because used time-slots are classified according to the moving direction of the vehicle, this results in lowering the merging collision rate. On the other hand, VeMAC did not take into account the relative speed difference between the vehicles; therefore, merging and access collisions may occur when there are many vehicles moving at different speeds.
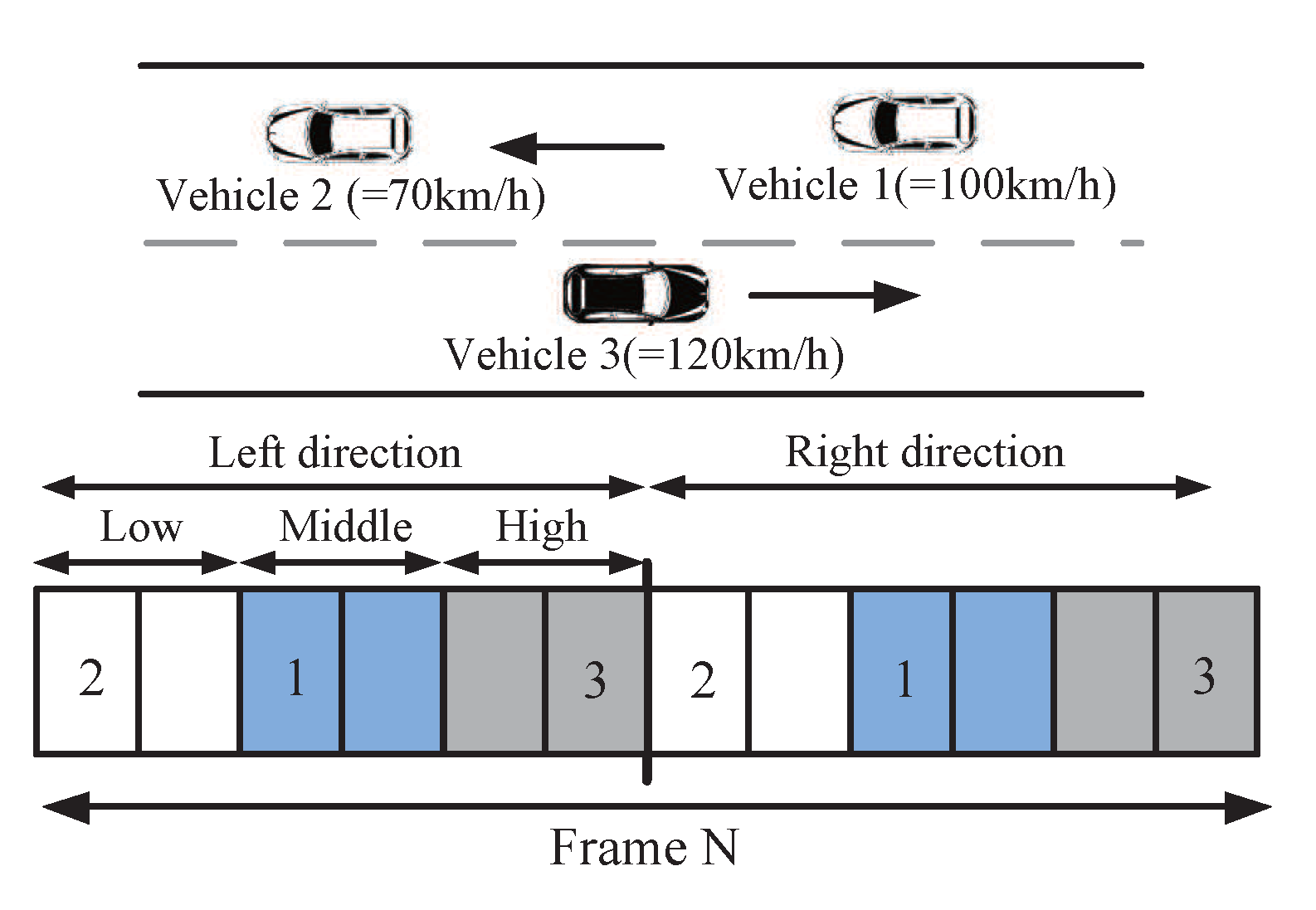
The collision-free reservation-based MAC (CFR MAC) is a distributed TDMA protocol that improves on VeMAC by considering the relative speed and traffic flow of each vehicle [
9]. Like VeMAC, the resource allocation of each vehicle is divided into two sub-frames and resources are allocated to the vehicles according to their moving directions (left and right). As we just discussed, if vehicles moving in the same direction have different speeds, a merging collision problem may occur. To solve this problem in CFR MAC, the left/right sub-frame of each frame is subdivided into three levels (high, middle, and low), and resources are allocated accordingly, as shown in
Figure 5. Each vehicle calculates its relative speed from the difference between its own speed and the average speed of neighbor vehicles. If the relative speed is lower than the standard deviation speed, it is set to have a “low” phase. If it is higher than the standard deviation, it is set to have a “high” phase. The rest of the vehicles are determined to have a “middle” phase. CFR MAC has the advantage of avoiding merging collisions because it allocates resources by considering both the moving direction and speed of each vehicle. However, when traffic density is high in one direction, vehicles may experience many merging collisions due to finely divided resource allocation units.
Prediction-based TDMA MAC (PTMAC) proposed a method to avoid resource collisions by predicting the position of vehicles using the same resources over a 2-hop communication range [
10]. Like ADHOC MAC, PTMAC allocates available time-slots randomly regardless of the vehicle movement direction and speed. Each vehicle stores its occupied time-slot, its own position, its speed, and its moving direction in its FI message and broadcasts it to its own 1-hop neighbor vehicles. As shown in
Figure 6, each vehicle can recognize the existence of 2-hop neighbor vehicle(s) using the same time-slot from the FI message and can predict whether there will be resource collision in the near future by estimating the position of vehicles sharing the same time-slot. If a resource collision is predicted, the vehicle abandons the resources occupied by the current frame and selects another unused time-slot in the next frame.
In [
11], MAC protocols designed or adapted for VANET were studied giving a qualitative comparison with the IEEE 802.11 protocols based on CSMA/CA and inter-frames spaces. The author of [
12] proposed MOvement Prediction based Routing (MOPR) for VANETs, which improves the routing process by selecting the most stable route in terms of lifetime considering the movement of vehicles, and the MOPR was applied to position-based routing protocol. The results showed that the MOPR enhanced the performance compared to Greedy Perimeter Stateless Routing (GPSR) and MOvement-based Routing Algorithm (MORA). In [
13,
14], the authors suggested the hybrid protocol called Active Signaling-DTMAC (AS-DTMAC), with the purpose of resolving the problem of access collision in the time-slot assignments of the DTMAC protocol. In these works, AS-DTMAC is analyzed based on generating functions and the collision rate of AS-DTMAC is studied. The number of time frames to achieve collision-free resource allocation and the transmission requirements for urgent packets are studied. The simulations showed the enhanced performance of the proposed AS-DTMAC in terms of collision rate and convergence.
It is noted that VeMAC and CFR MAC can reduce resource collisions by using slot segmentation techniques. However, in the direction with high traffic density, the slot usage rate is low, resulting in frequent merging collisions. In addition, resource collisions between vehicles traveling in the same direction but at different speeds cannot be avoided. PTMAC suggests a resource collision method that is based on the prediction of location, speed, moving direction, and slot information of neighbor vehicles without using a slot partitioning method. However, many vehicles can not accurately predict whether or not there will be resource allocation collision (time-slot collision in TDMA-based VANET) due to sudden change of position arising from rapid acceleration/deceleration and moving direction change. In addition, in some road environments such as intersections with/without traffic lights, circuit intersections, and curved highways, the accuracy of the collision prediction can be greatly reduced if it relies only on the information of the current traveling speed and the simple moving direction (left and right or up and down) of each vehicle.
3. Proposed Algorithm
In this section, we propose a vector-based mobility model that can be used to predict resource collision in any kind of road environment, which considers speed, acceleration/deceleration, and the vector-based moving direction of each vehicle. In the proposed algorithm, each vehicle periodically broadcasts a FI message to its 1-hop neighbor vehicles through the control time-slot, like previous VeMAC, CFR MAC, and PTMAC. Neighbor vehicles receiving the FI message can predict the moving direction and the position of each vehicle through the proposed algorithm. In the following subsections, we explain the frame and FI message structures, a control time-slot occupation procedure, collision detection/prediction procedures, and a collision avoidance procedure, all of which are necessary to facilitate the proposed vector-based mobility model.
3.1. Proposed Frame Structure and Fi Message Format
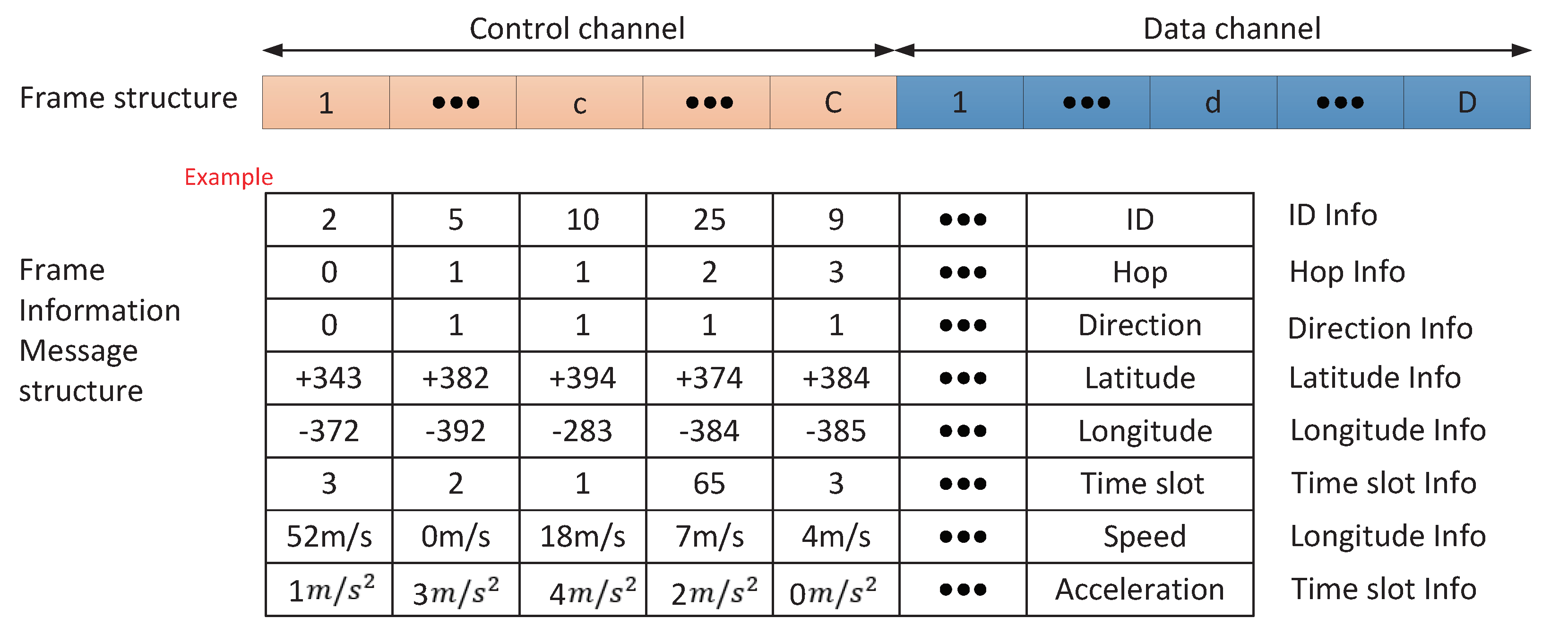
Figure 7 shows the frame structure and FI message format to support the proposed algorithm. Each frame consists of
C control time-slots and
D data time-slots. Each vehicle searches for a control channel when entering the network and occupies one unused control time-slot. Each vehicle transmits an FI message through the occupied control channel. The FI message includes the ID of neighbor vehicles together with that of itself, the hop information of each vehicle, the traveling direction, the location (longitude and latitude), the occupied control time-slot, the current speed, and the acceleration. “ID Info” of each vehicle is used as the identification information. “Hop Info” expresses itself and the n-hop neighbor vehicle as “0” and “n”, respectively. “Direction Info” indicates how far the vehicle has rotated clockwise relative to the north at zero degrees. “Longitude and Latitude Info” are converted into x, y coordinates using TM (Transverse Mercator) coordinates. “Time-slot Info” represents the occupied time-slot information of a vehicle. “Speed Info” is the speed of a vehicle, and “Acceleration Info” represents how much the speed of a vehicle has changed during the unit time.
3.2. Control Time-Slot Occupation and Collision Recognition Procedures
Each vehicle searches for the control channel at the initial network entry, analyzes the frame information message received in the control time-slot, and occupies the control time-slot to be used. At this time, the empty control time-slot are randomly selected by the vehicle to prevent collision of control time-slot allocation. If a control time-slot assignment is successfully made, this control time-slot assignment information is normally represented in the FI messages of neighbor vehicles. However, if collision of the control time-slot occurs, the neighbor vehicle does not update its control time-slot allocation information. In this way, each vehicle can judge whether there is a collision of its control time-slot allocation through the FI messages of neighbor vehicles. If a control time-slot allocation collision occurs, 2-hop neighbor vehicles attempt to re-occupy one of the unassigned control time-slots.
3.3. Collision Prediction and Avoidance Procedures
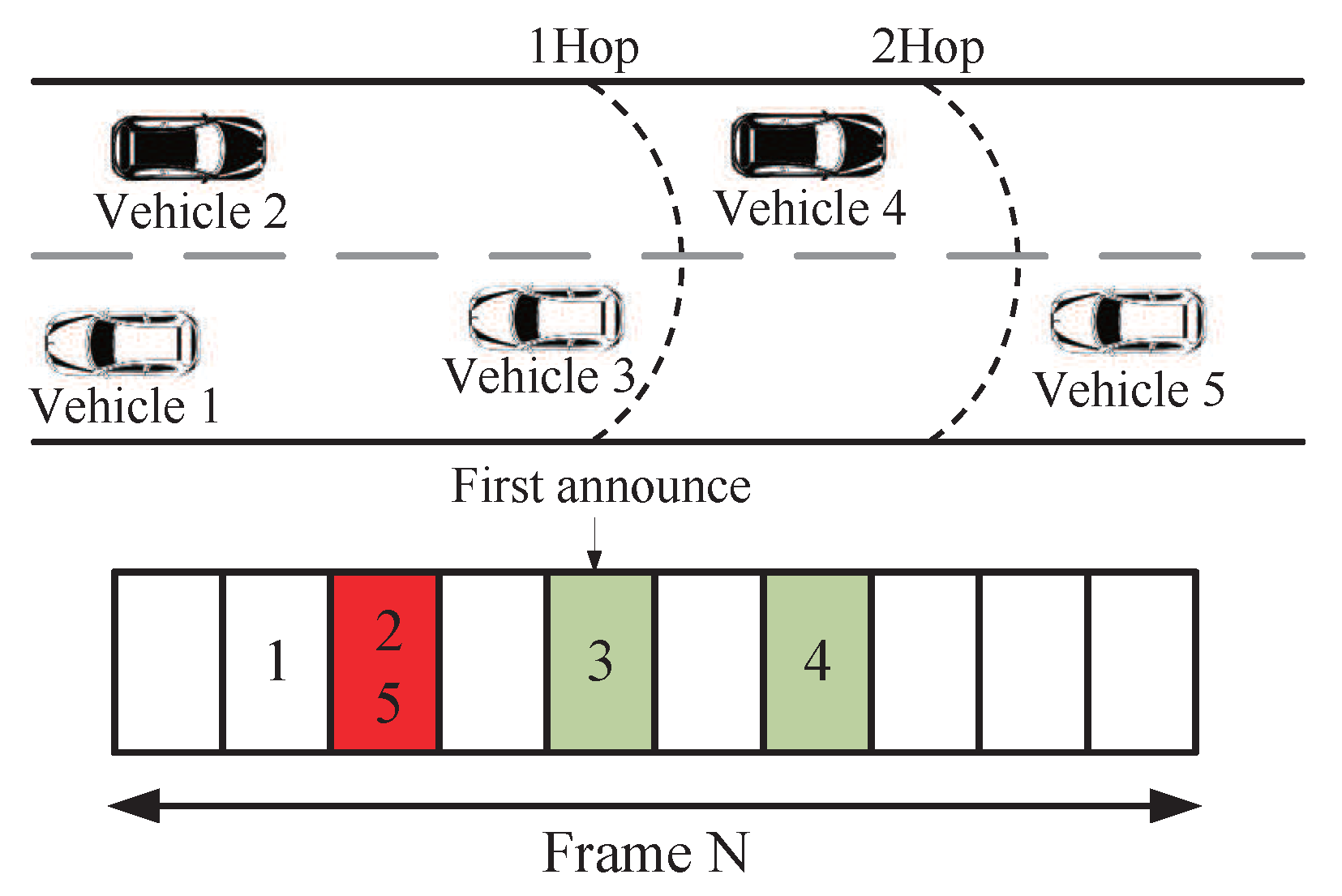
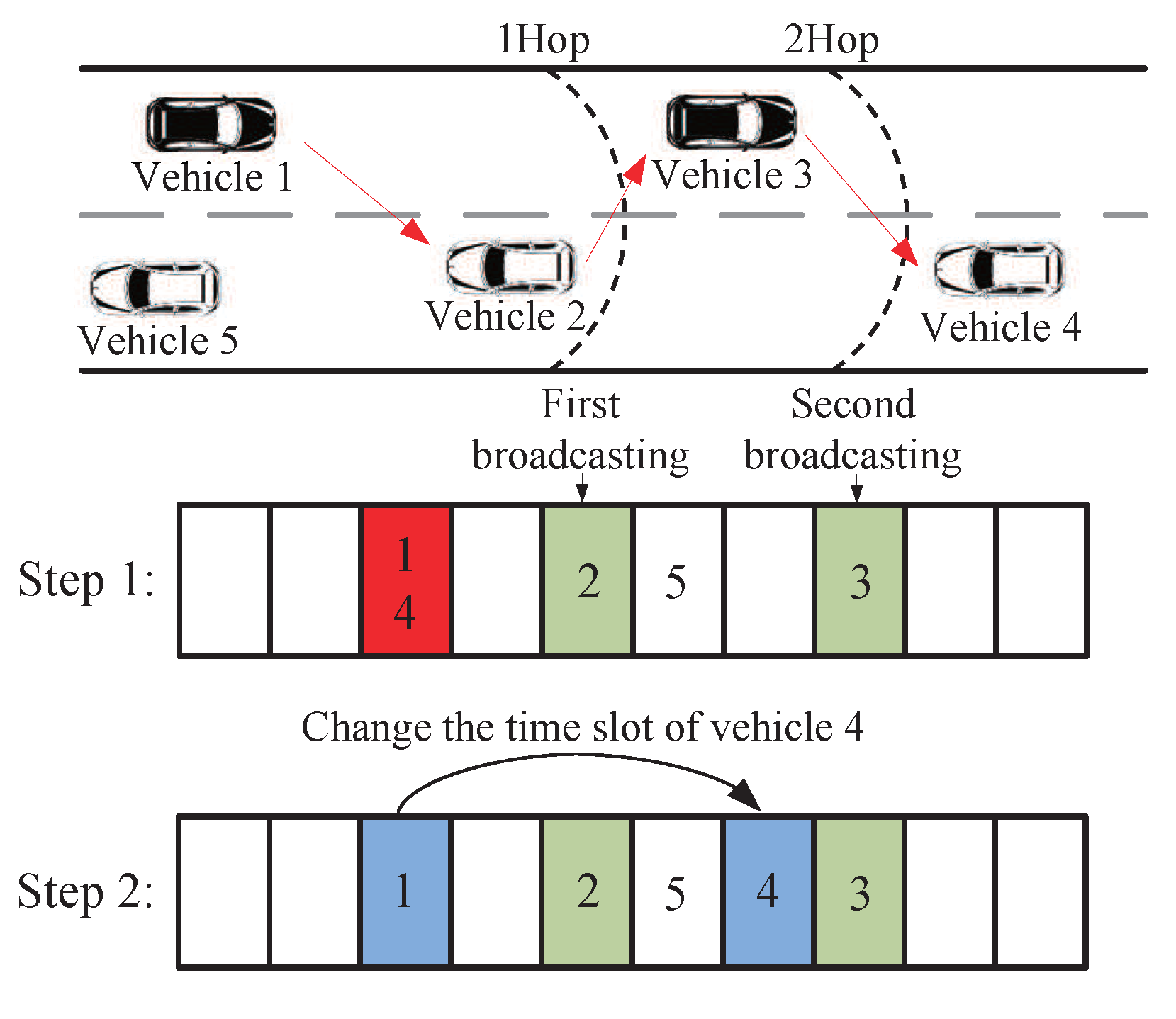
The vehicle that successfully occupies the control time-slot periodically broadcasts an FI message through the corresponding control time-slot every frame. Each vehicle updates the FI message received from the 1-hop neighbor vehicle together with its FI message and broadcasts it again. Suppose that there are five vehicles as shown in
Figure 8. Vehicles 2 and 5 are 1-hop neighbors, vehicle 3 is a 2-hop neighbor, and vehicle 4 is a 3-hop neighbor of vehicle 1. The third time-slot is reused by both vehicles 1 and 4, which are 3 hops away from each other. Vehicle 1 broadcasts the FI message including the information of its 1-hop neighbors, vehicles 2 and 5. And then, vehicle 2 broadcasts its FI message including the information of vehicles 1, 2 and 5, to vehicle 3. Vehicle 3 broadcast its FI message to vehicle 4, and vehicle 4 can recognize that the same time-slot is shared by its 3-hop neighbor, vehicle 1. Then vehicle 4 changes its time-slot to another time-slot to avoid collision. In this manner, the information of a vehicle is spread over all the network, so the information of each vehicle in the network can be theoretically shared across the network. However, considering the latency required to relay FI messages and the network topology change that might occur during this latency, it is unrealistic and inefficient to share the information of each vehicle across all vehicles in a network. Therefore, when constructing the FI message, it is necessary to consider the information acquisition of the vehicle within the 3-hop communication range, in which the possibility of merging collision is high. Therefore, in this study, we limit the maximum value of “Hop info” in the FI message by 2, so that the neighbor vehicles updated by the FI messages are located equal to or less than two hops away, and consequently each vehicle receiving the FI message can recognize up to 3-hops neighbor vehicles.
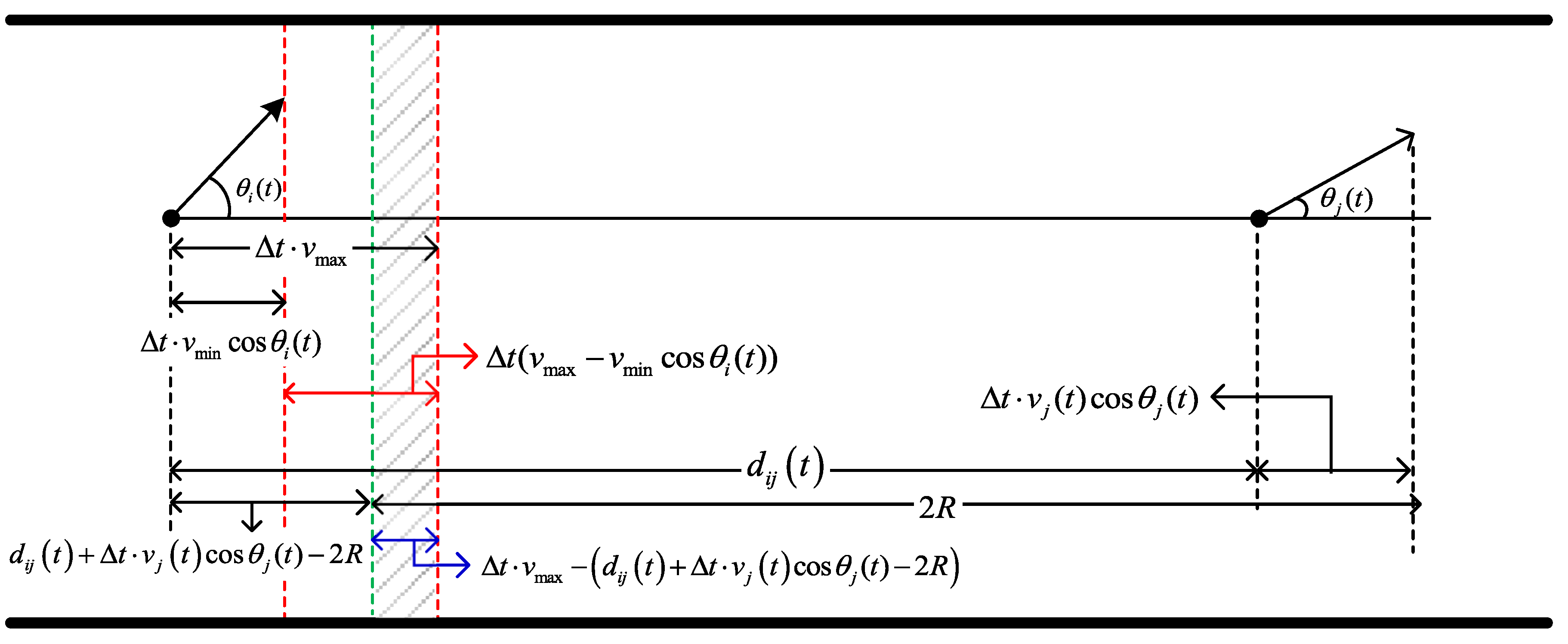
The proposed resource collision prediction and merging collision avoidance procedures are as follows. Each vehicle verifies the existence of vehicles that use the same time-slot to that of itself. If a vehicle finds a 3-hop neighbor vehicle that uses the same time-slot as that of itself, the position of the vehicle at the next frame is periodically estimated using the proposed mobility model. When it is expected that the distance between two vehicles that share the same time-slot will be close to within a 2-hop distance, each vehicle gives up its own occupied time-slot and occupies a new time-slot to avoid a merging collision in the next frame.
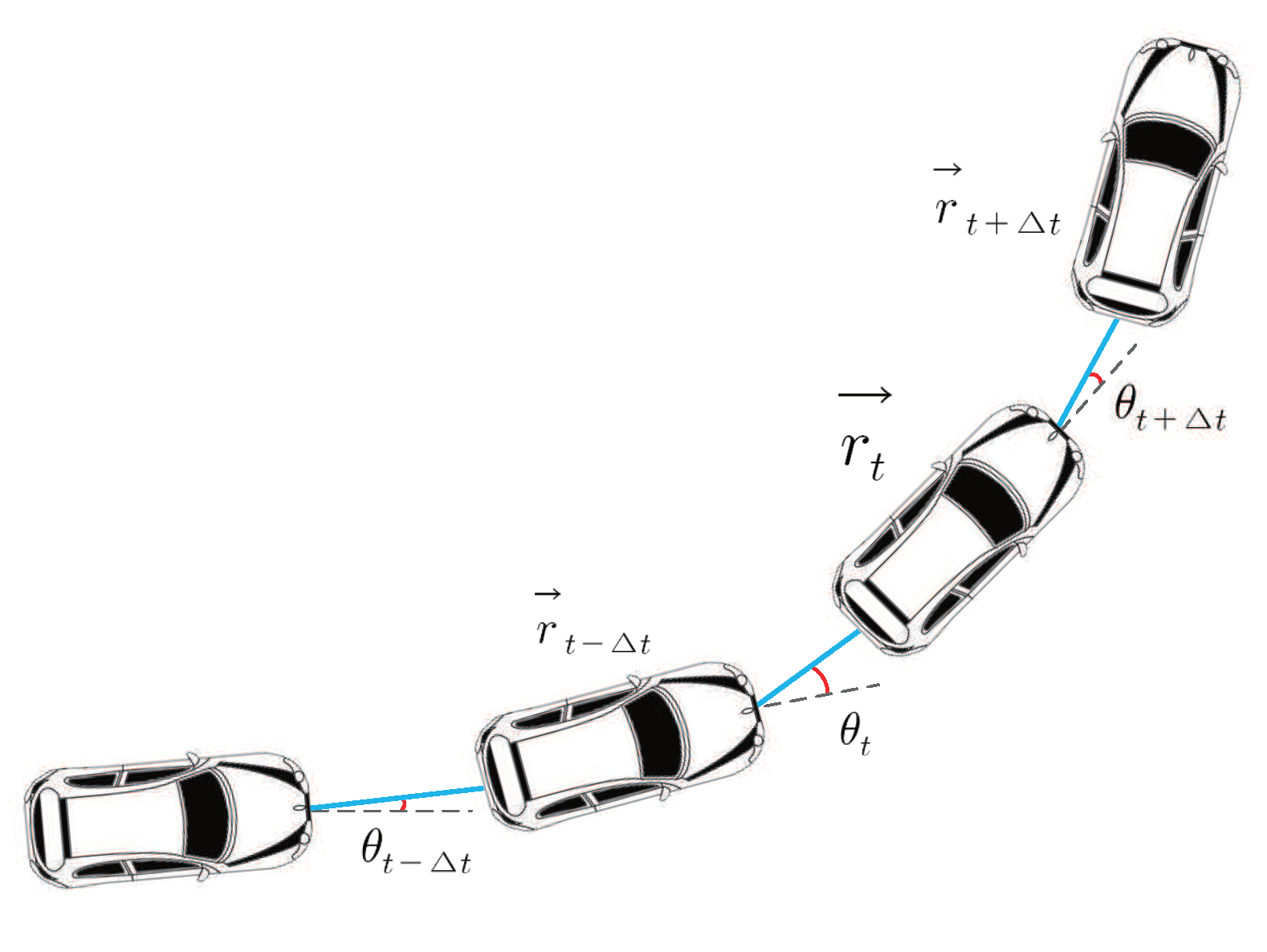
3.4. Mobility Model
It is assumed that each vehicle knows its own information about vehicle speed, acceleration, and current position, which are obtained from a GPS device installed in the vehicle. The vehicle speed, acceleration, and current position at time
t are vectorized in x and y coordinates on the network, and denoted as
,
, and
, respectively, as shown in
Figure 9. Its moving position
after time
through the vehicle information at time
t is calculated by
The moving direction angle at time
t is estimated from previous change in the moving position measured from time
to time
t, which is given by
is predicted through the change of
from time
to time
t as
is obtained through the change of
from time
to time
t as
From (
1)–(
4), the expected direction
of the vehicle movement at time
is given by
The expected position of the vehicle at time
is calculated by
5. Simulation Results
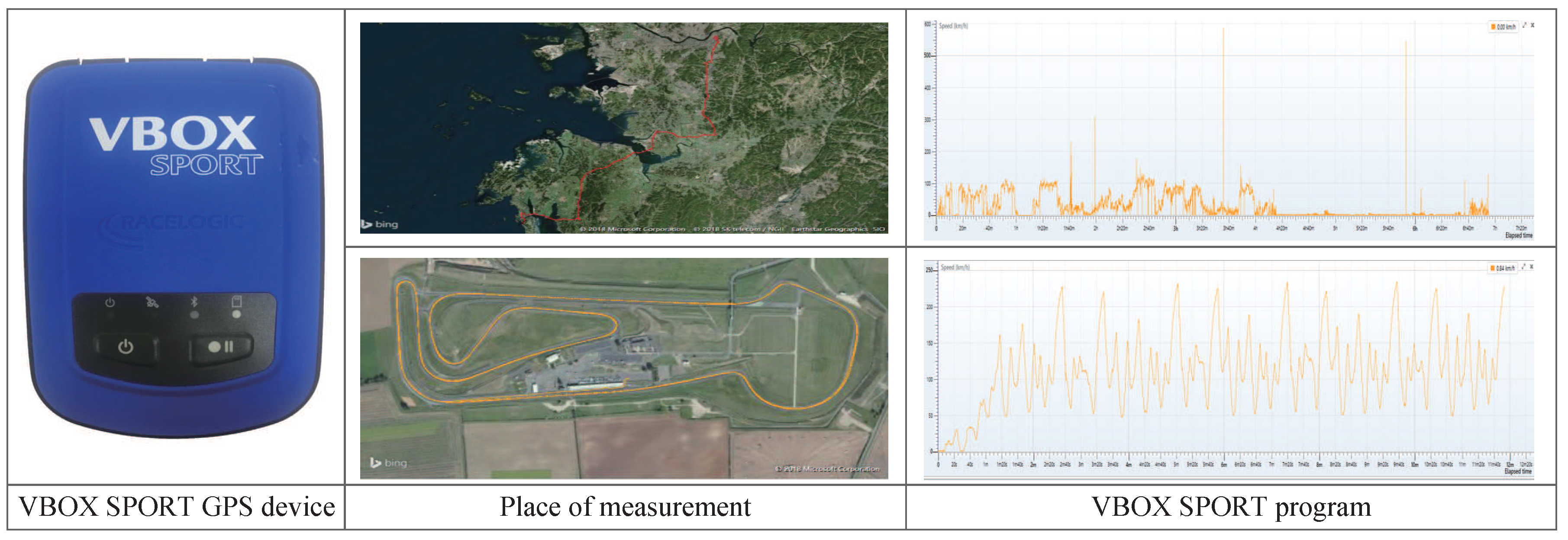
In this section, we compare the performance of the proposed algorithm with those of VeMAC, CFR MAC, and PTMAC. For the performance evaluation in diverse environments, we measure the mobility of a vehicle using GPS equipment called VBOX Sport.
Figure 11 shows VBOX Sport and its management program. VBOX Sport records the actual vehicle path, speed, and location every 50 ms via GPS and is used to derive the actual mobility model of the vehicle in this paper. In order to collect measurement data in various environments, we collected data repeatedly from actual highways and intersections, taking into account dozens of moving cases such as acceleration/deceleration, stopping, high speed and low speed.
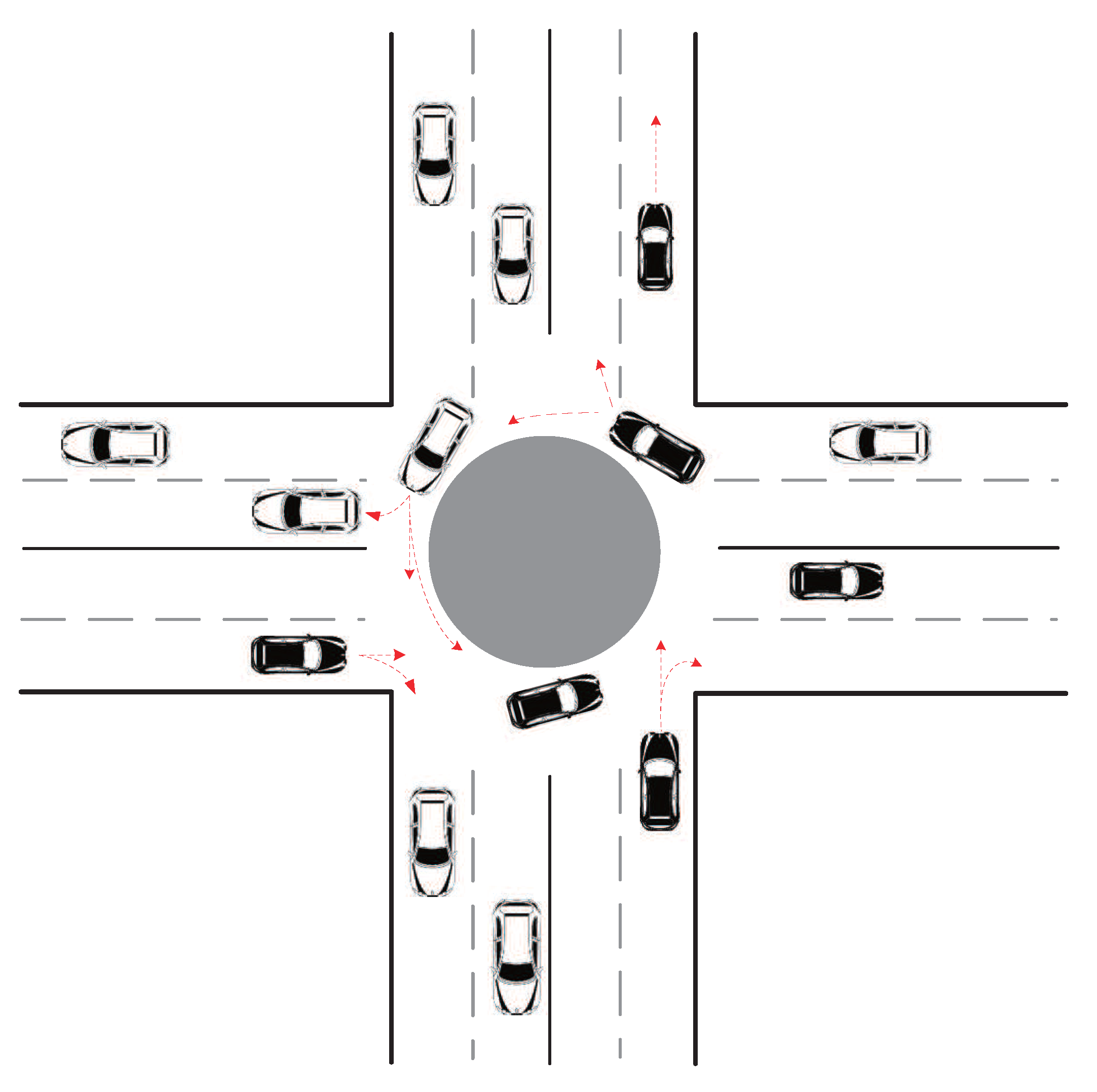
Figure 12 and
Figure 13 show road scenarios for an intersection with traffic lights and a circuit intersection without traffic lights, respectively. It is assumed that the signal of the traffic lights on the road changes every 10 s. At an intersection, the vehicle’s direction of travel can be a left turn, a right turn, or moving forward, where the probability that the vehicle will choose any direction of travel is the same as 1/3. At a circuit intersection, it is assumed that each vehicle can proceed in one of four directions of 90, 180, 270, and 360 degrees, with the same probability of 1/4 as well.
Table 2 summarizes the remaining simulation parameters used in this paper.
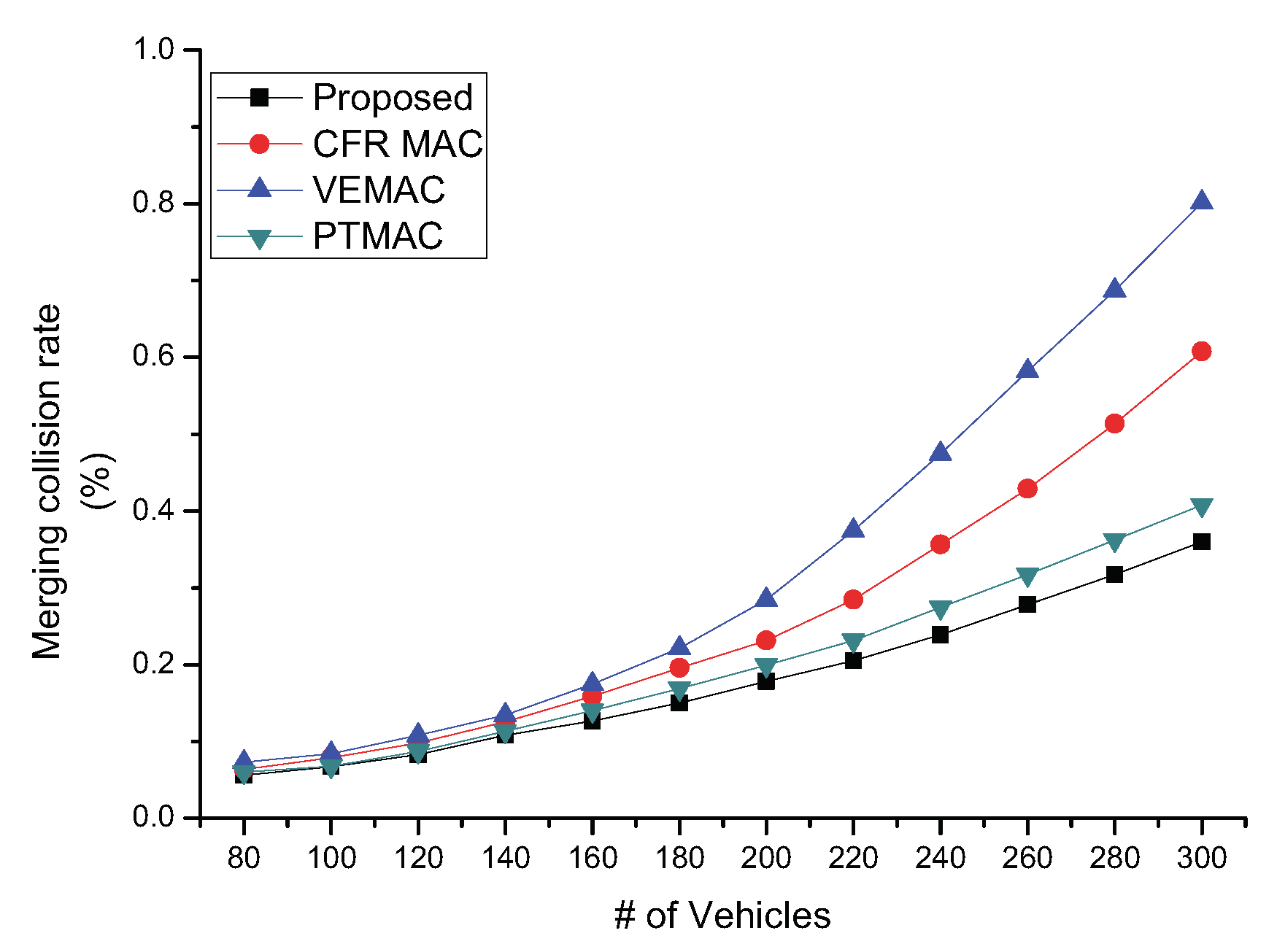
Regarding the performance metrics, we evaluate merging collision rate and access collision rate as a function of the number of vehicles in a network. Merging and access collision rates are defined as the average number of merging collisions per frame and the average number of access collisions per frame, respectively.
Figure 14,
Figure 15 and
Figure 16 show the results for the average merging collision rate as a function of the number of vehicles in various environments.
Figure 14 shows the merging collision rate on the highway. The result shows that the proposed algorithm decreases merging collision rate by up to
,
and
compared to VeMAC, CFR MAC, and PTMAC, respectively, which shows that the vector-based prediction model outperforms slot partitioning-based algorithms. Because PTMAC and the proposed algorithm do not use the slot partitioning method, merging collisions can occur between vehicles moving in different directions. However, the result also verifies that the proposed algorithm prevents merging collision more effectively than PTMAC.
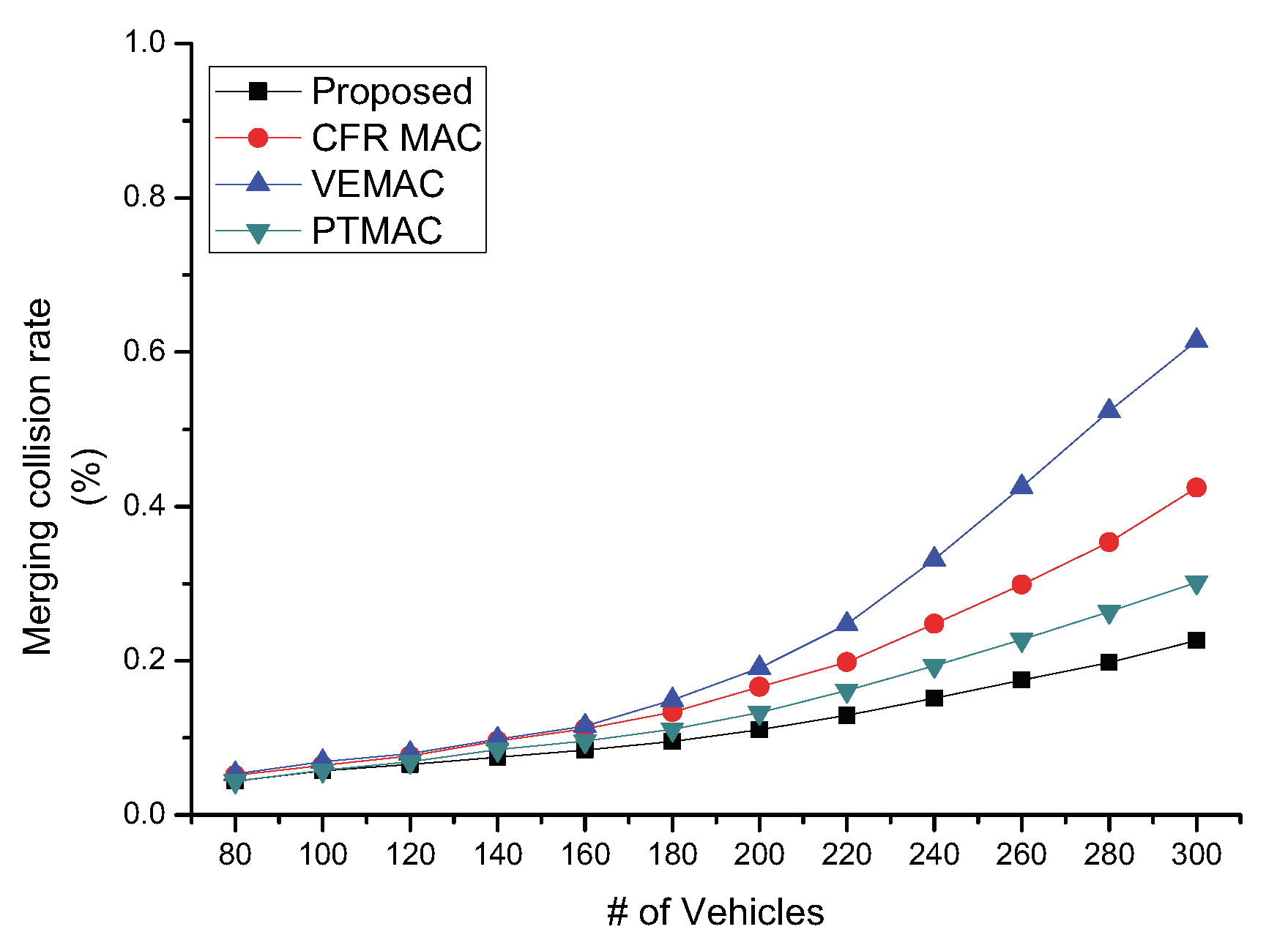
Figure 15 shows the merging collision rate at an intersection with traffic lights. In this scenario, the proposed algorithm reduces the merging collision rate by up to
,
, and
, compared to VeMAC, CFR MAC, and PTMAC, respectively. When the traffic light is red, there are many vehicles stopping, resulting in fewer merging collisions. On the other hand, when the traffic light is green and many vehicles pass through the intersection, there is a high possibility that resource collision will occur due to high mobility and the various moving directions of vehicles. As a result, the merging collision rate increases in VeMAC and CFR MAC using the slot partitioning method. On the other hand, in PTMAC, the merging collision rate increases because each vehicle cannot accurately predict the moving direction of neighbor vehicles.
Figure 16 shows the merging collision rate at a circuit intersection. In this scenario, the proposed algorithm reduces the merging collision rate by up to
,
, and
, compared with VeMAC, CFR MAC, and PTMAC, respectively, and this result can be explained by the same reason as for the explanation of
Figure 15. In addition, the proposed algorithm decreases the merging collision rate compared to VeMAC, CFR MAC, and PTMAC, and this performance gain is the largest for the highway and the smallest for the circuit intersection without traffic lights. To sum up, the proposed algorithm has a greater effect in decreasing merging collision rates when the traffic density is high and the mobility of the vehicle is high with rapidly changing travel direction.
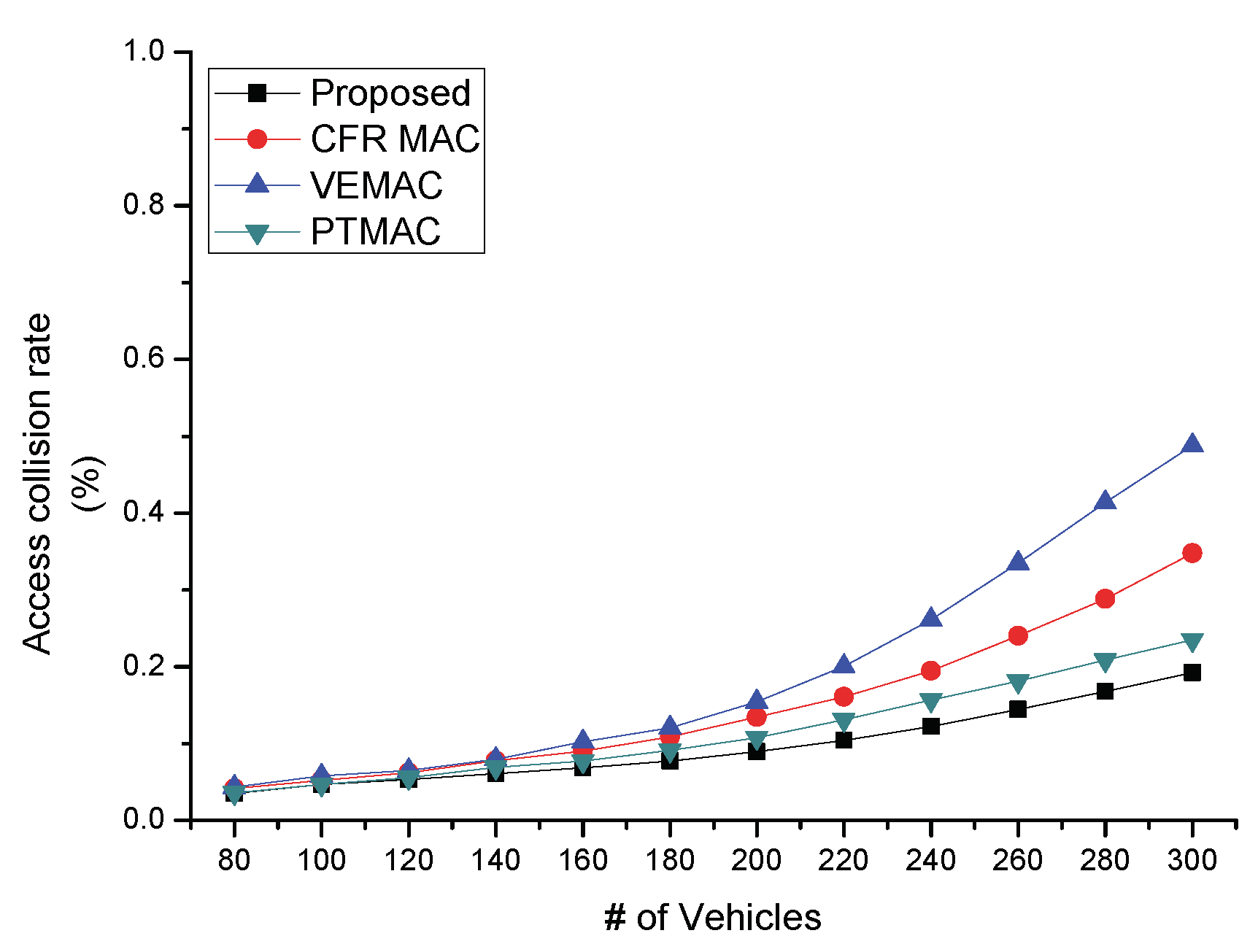
Figure 17,
Figure 18 and
Figure 19 show the results for the average access collision rates as a number of vehicles in various environments. In
Figure 17, it can be seen that the proposed algorithm in the highway environment reduces the access collision by up to
,
, and
, compared to VeMAC, CFR MAC, and PTMAC, respectively. In
Figure 18, we can see that the proposed algorithm in the intersection with traffic lights reduces access collisions by up to
,
, and
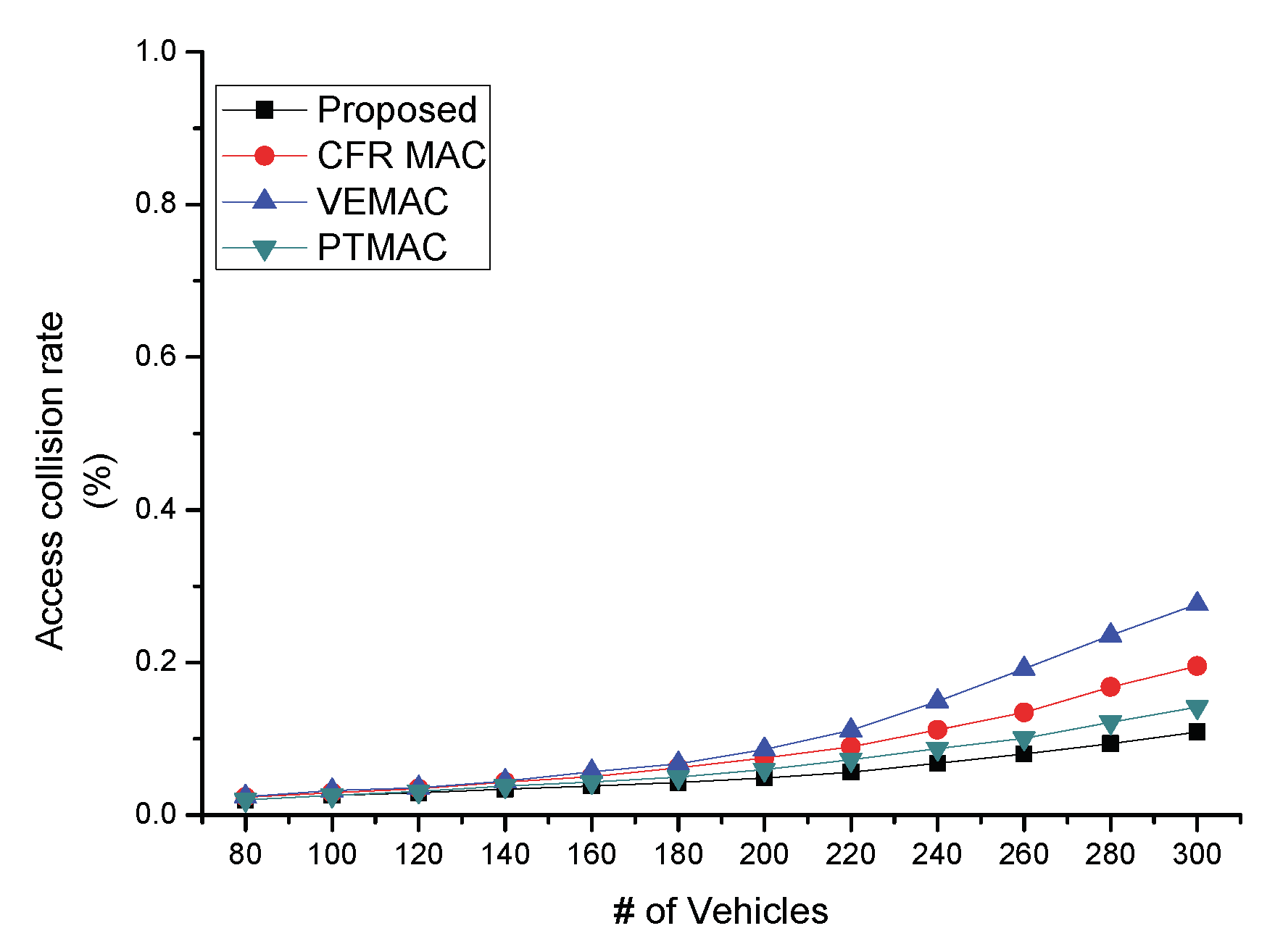
, compared with VeMAC, CFR MAC, and PTMAC, respectively. In
Figure 19, the result shows that the proposed algorithm in the circuit intersection without traffic lights reduces access collisions by up to
,
and
, compared with VeMAC, CFR MAC, and PTMAC, respectively. It is noticed that access collision is incurred by vehicles that simultaneously enter the network and occupy the time-slot, or by vehicles that experience merging collision and try to re-occupy a time-slot. Similar to the results of the merging collision rate, the proposed algorithm decreases access collision rate compared to VeMAC, CFR MAC, and PTMAC and this performance gain is largest for the highway and smallest for the circuit intersection without traffic lights. As such, the same conclusion can be made as in the case of the merging collision: the proposed algorithm has a greater effect on decreasing the access collision rate as the traffic density is high and the mobility of vehicles is high with rapidly changing travel direction.
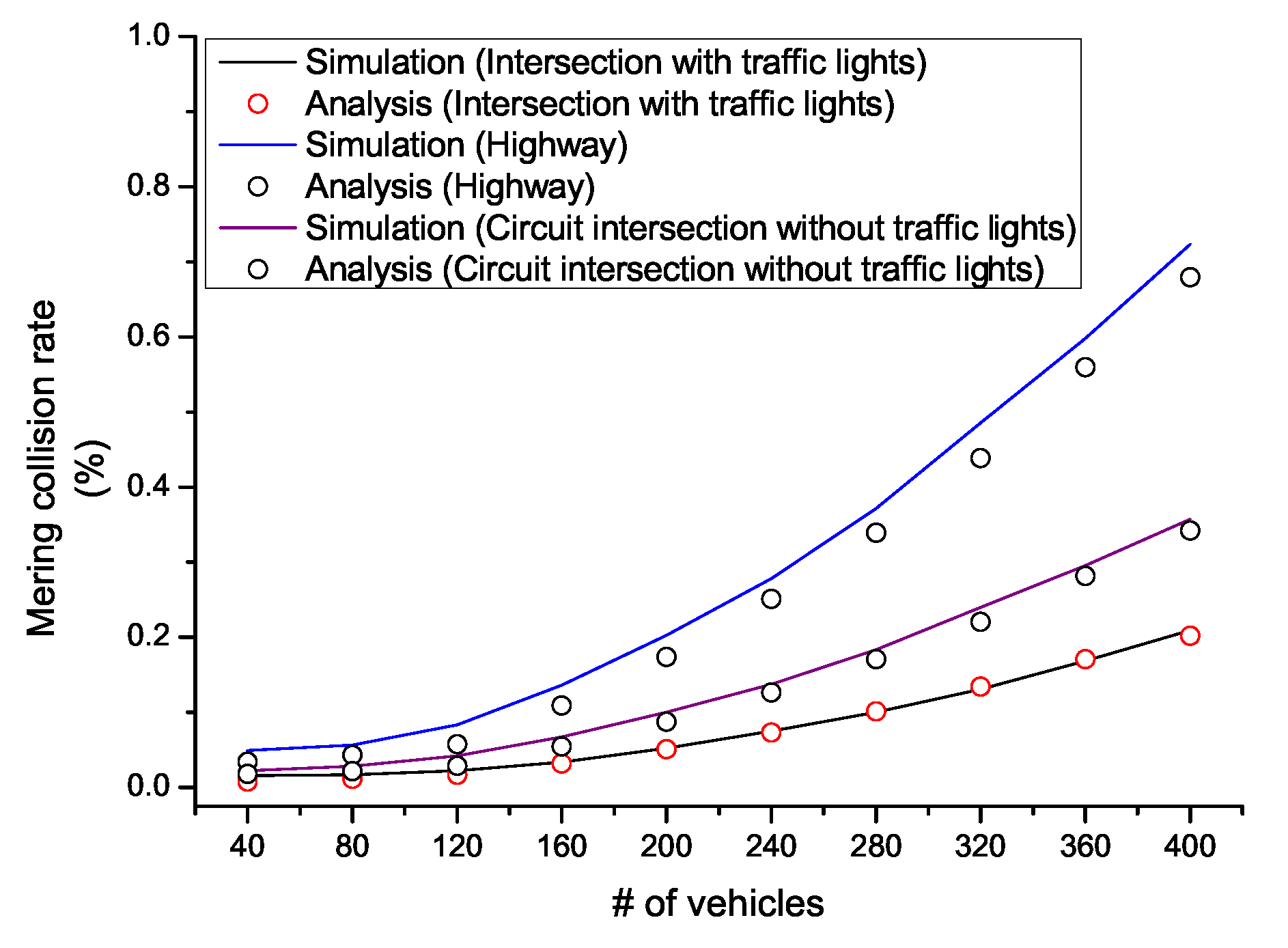
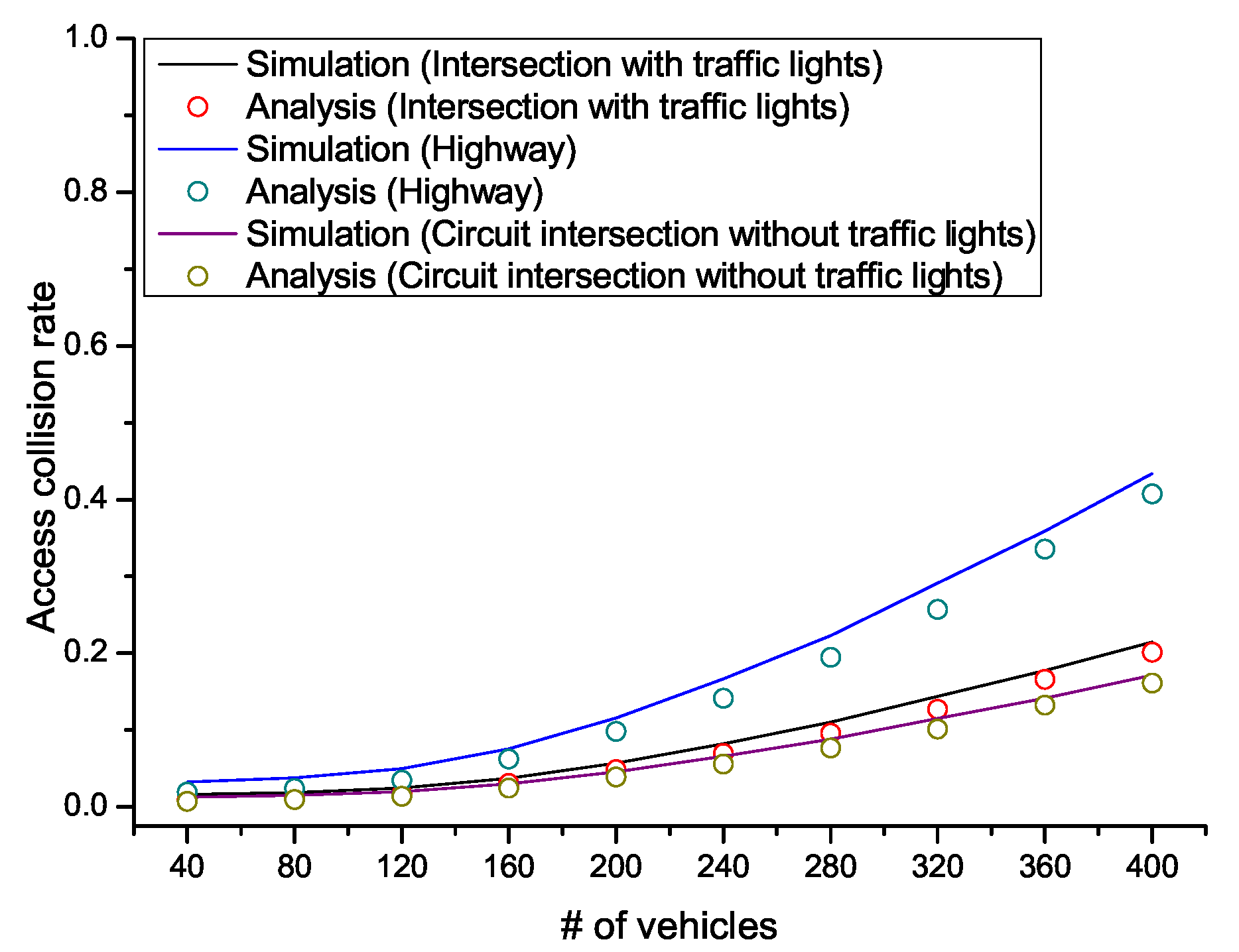
Figure 20 and
Figure 21 show both the simulation and analysis results for the merging and access collision rates of the proposed algorithm in various environments. In these figures, we can verify that the analysis results coincide with the simulation results.
Figure 20 shows that the differences between analysis and simulation results for merging collision rates are at most
,
, and
for a highway, an intersection with traffic lights, and a circuit intersection without traffic lights, respectively. From
Figure 21, we can see that the differences between analysis and simulation results for merging collision rates are at most
,
, and
for a highway, an intersection with traffic lights, and a circuit intersection without traffic lights, respectively.
From the results shown in
Figure 14,
Figure 15,
Figure 16,
Figure 17,
Figure 18 and
Figure 19, we can verify the performance enhancement of the proposed algorithm over other protocols. It is noticed that the proposed algorithm is a prediction-based algorithm and the performance improvement of the proposed algorithm against PTMAC (another prediction-based algorithm) is greater under the circuit or intersection than under the two-way freeway road, which shows the effectiveness of the proposed algorithm on roads with great freedom of movement.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}