Electromagnetic Testing of Moisture Separation Reheater Tube based on Multivariate Singular Spectral Analysis





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
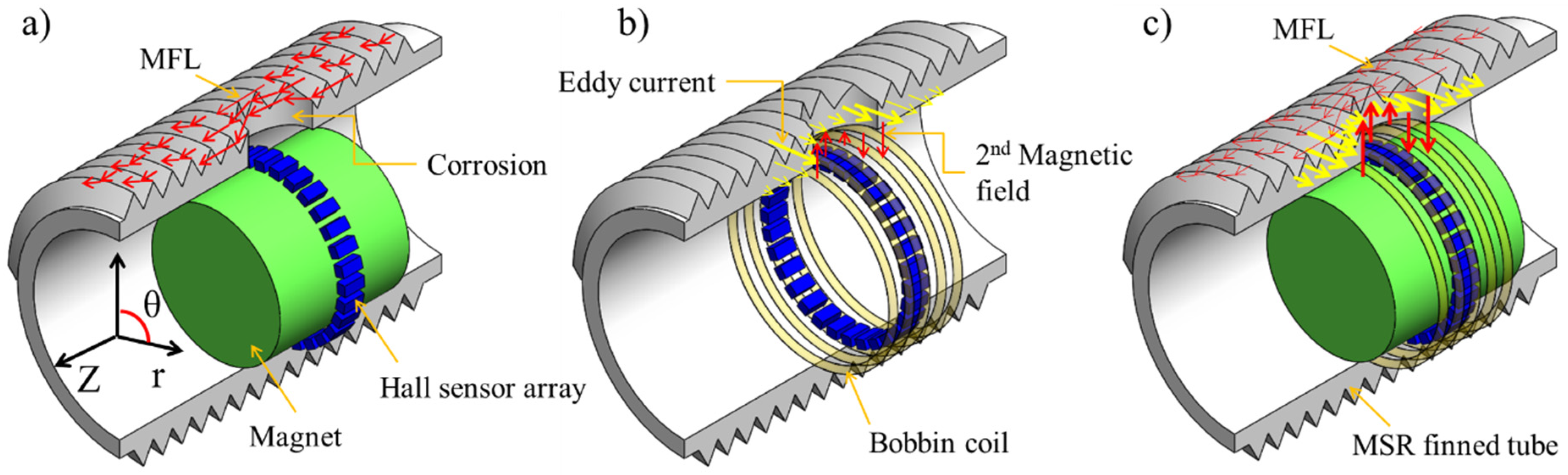
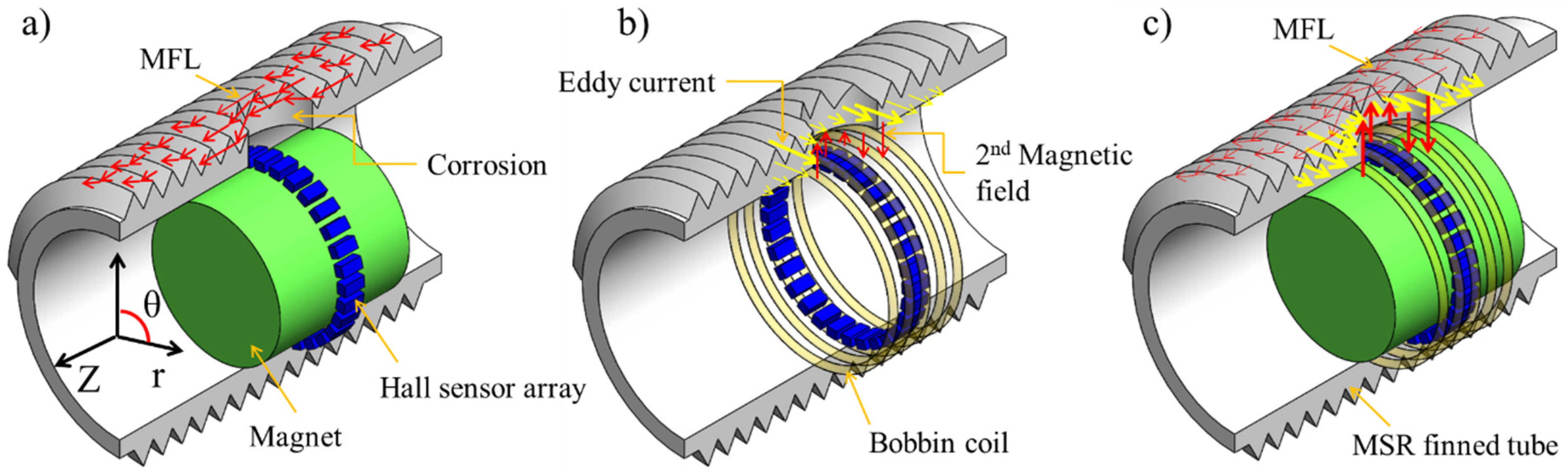
2. Principles of the Sensor Probes
3. Signal Processing Methods
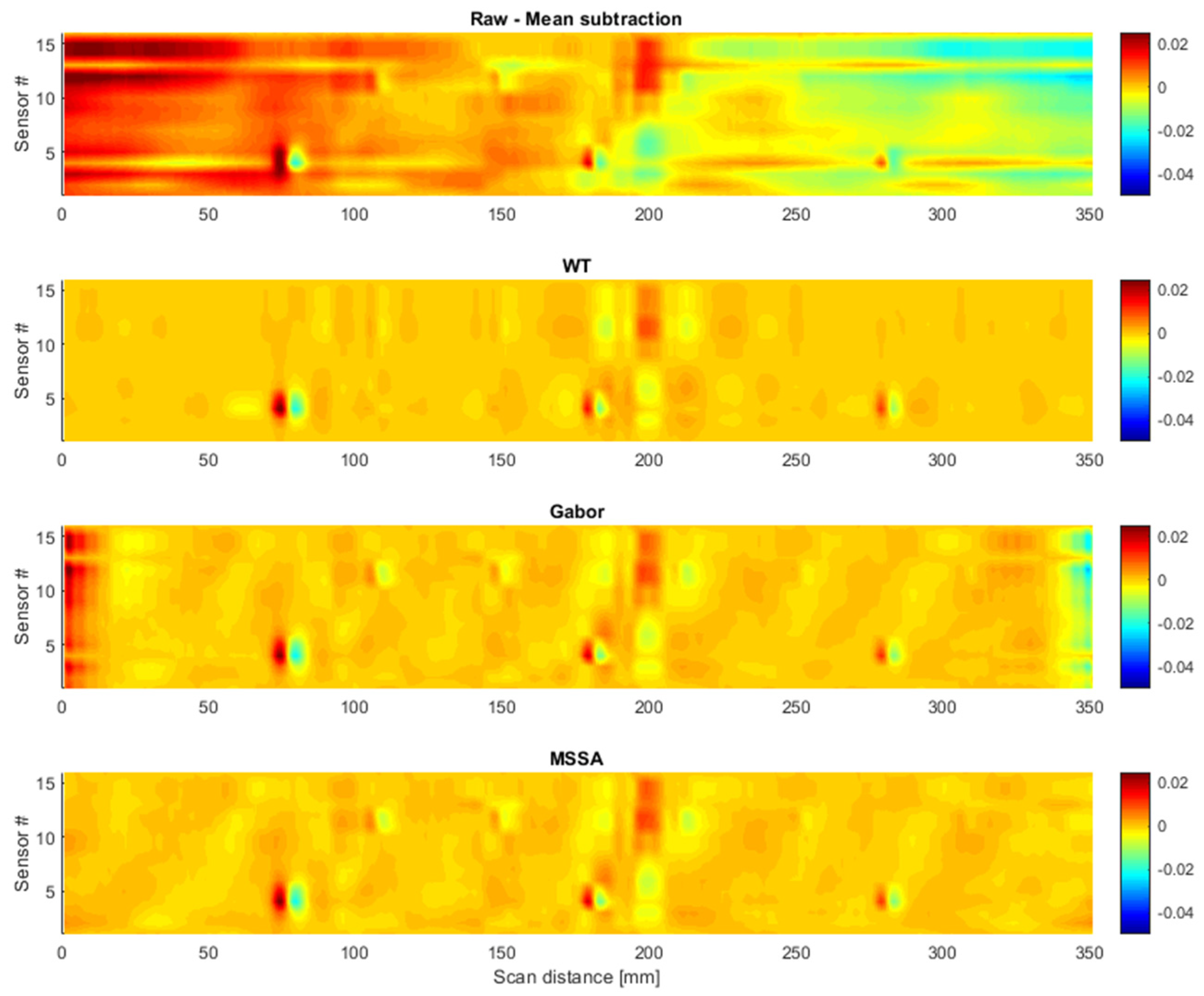
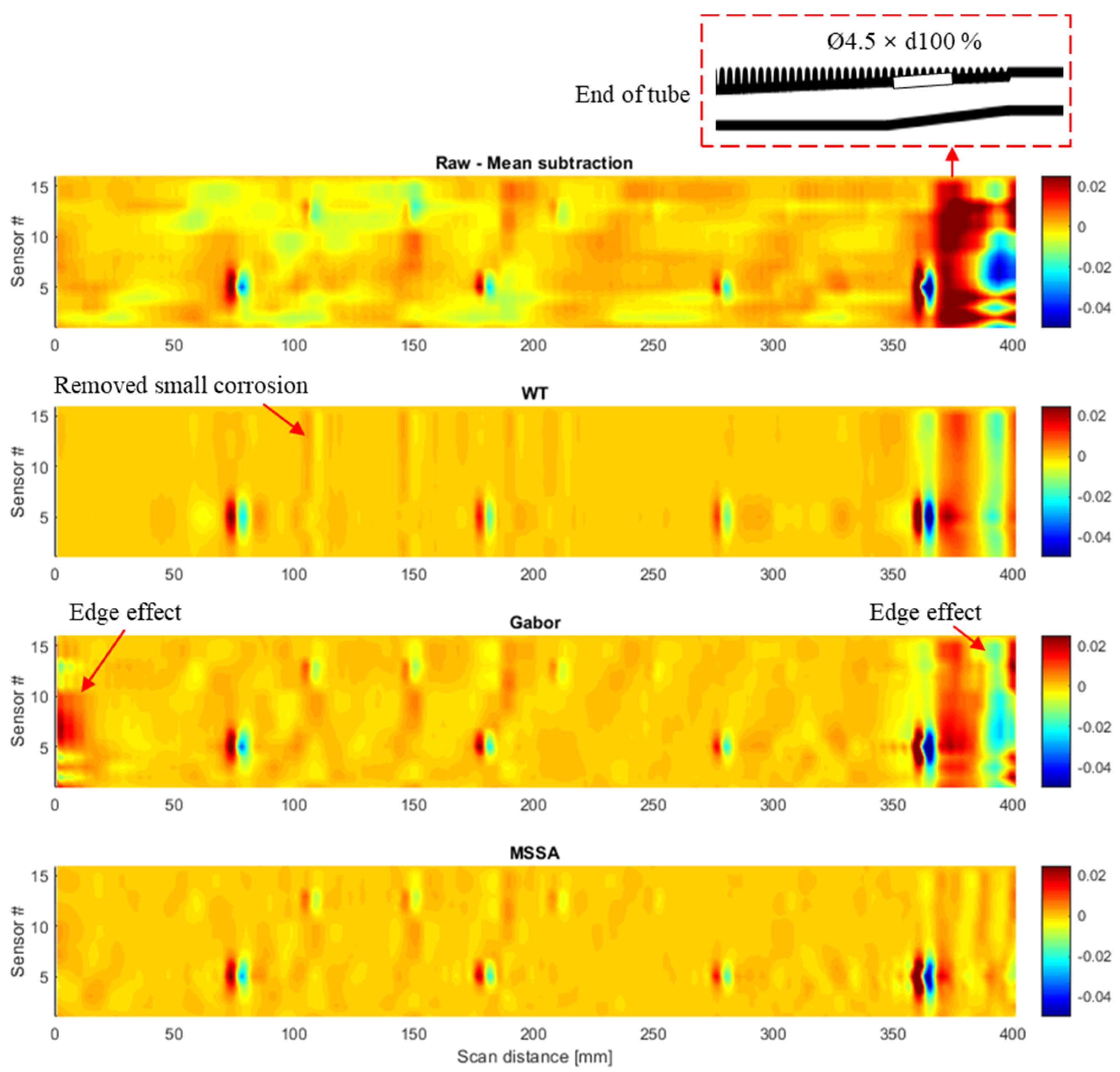
3.1. Gabor Filter
3.2. Wavelet Filter
- Input setting: mother wavelet, WT max level L, remained a number of principal components for each level Pi (1 ≤ i ≤ L) and reconstructed signal (step 5);
- Step 1: Perform WT at L levels for each input signal (VRMS(z)) to obtain detail components Di (1 ≤ i ≤ L) and approximation component AL at the max level L;
- Step 2: Concatenate each detail component Di in the same level of all the input signal to build a 2D detail matrix D. Then, perform PCA on the detail matrix D to remove the noise signal by retaining only a few numbers of principal components Pi;
- Step 3: Similar to step 2, concatenate the approximation component AL of all the input signals to build the 2D approximation matrix A. Then, perform PCA on the matrix A to remove the noise signal;
- Step 4: Reconstruct the signal from the processed approximation and detail components by inverting the wavelet transform;
- Step 5: Perform PCA again on the reconstructed signal to remove the noise if remained.
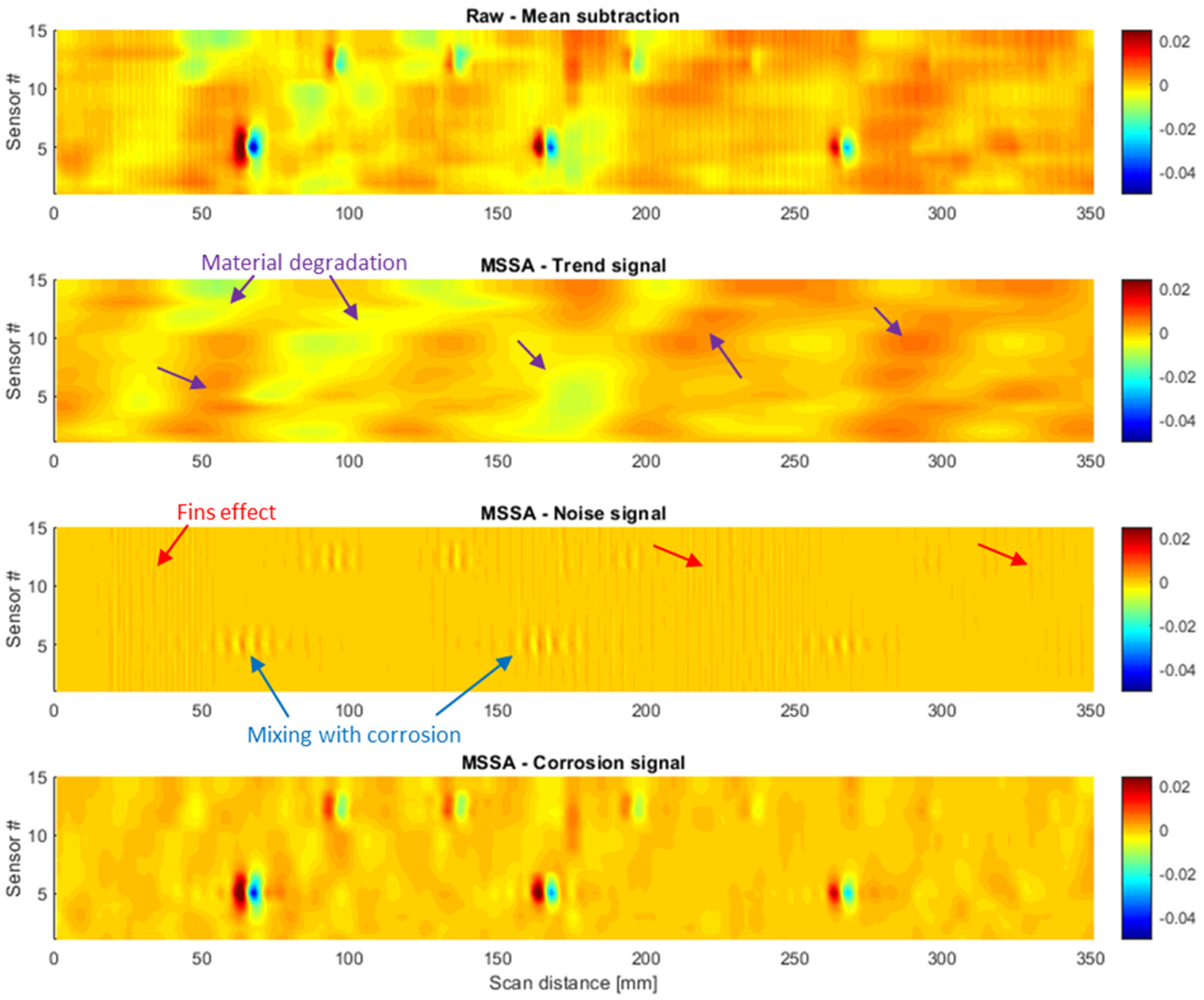
3.3. Proposed Multivariate Singular Spectral Analysis (MSSA) Filter
4. Experimental Results
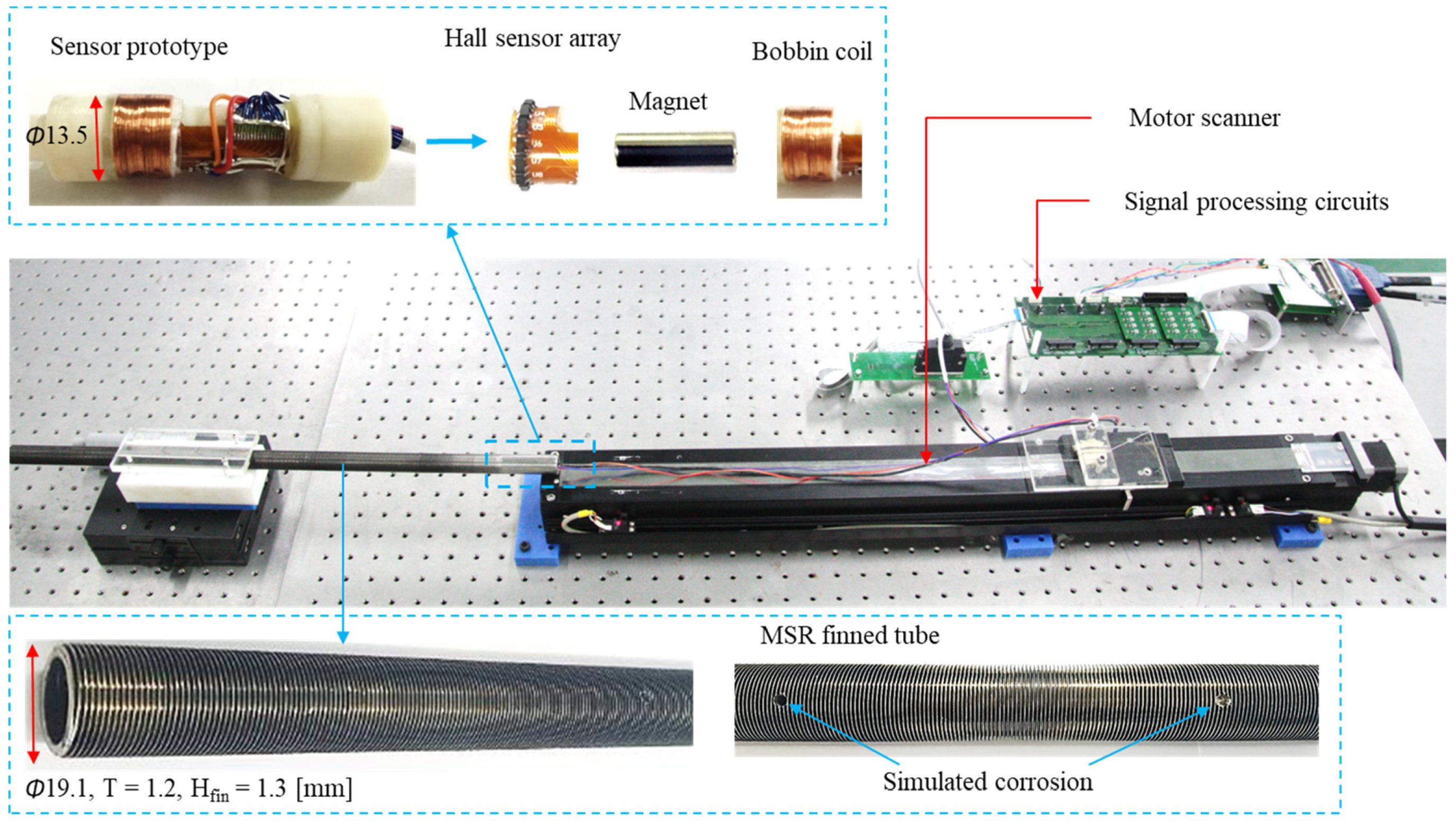
4.1. Experimental Setup
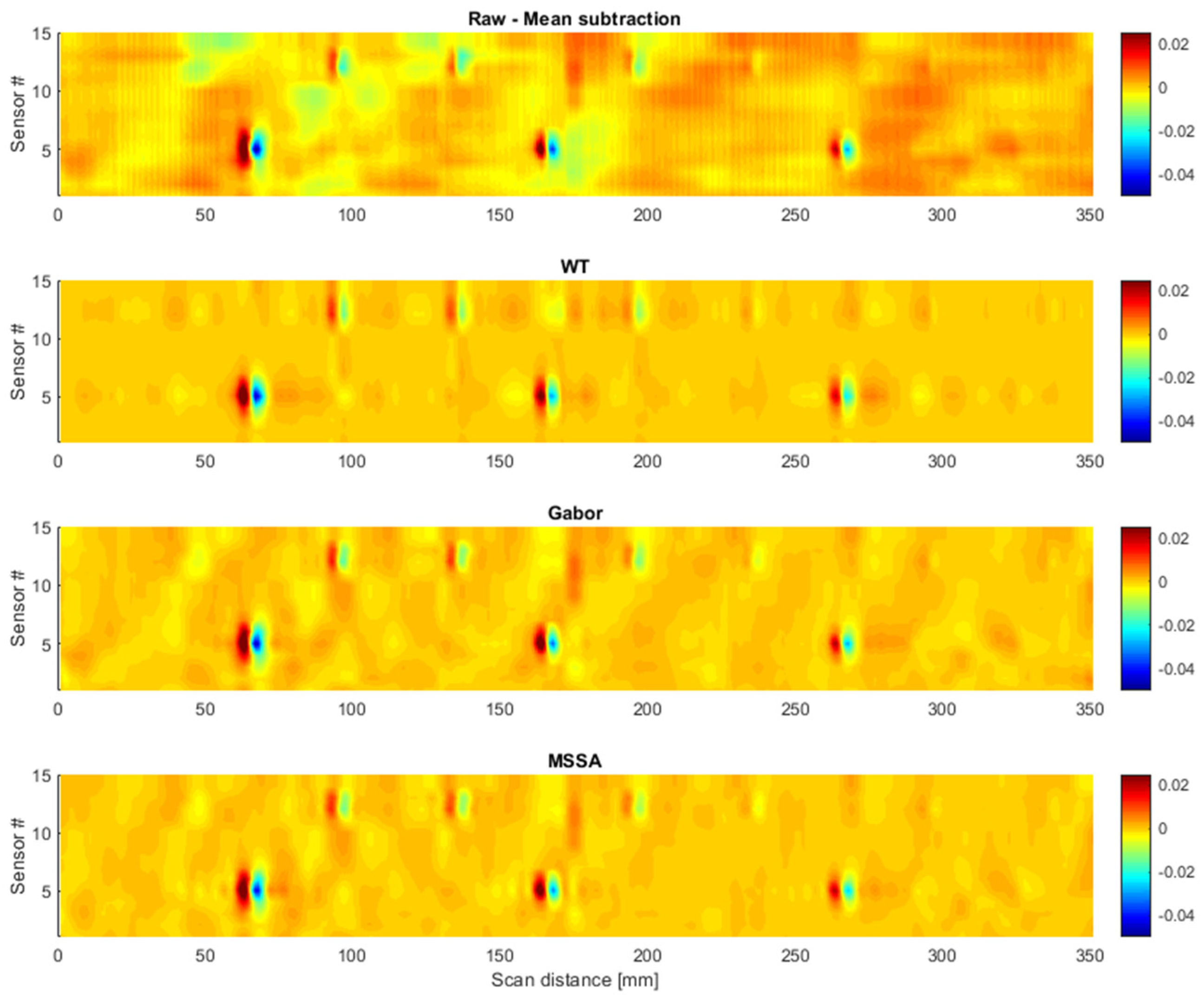
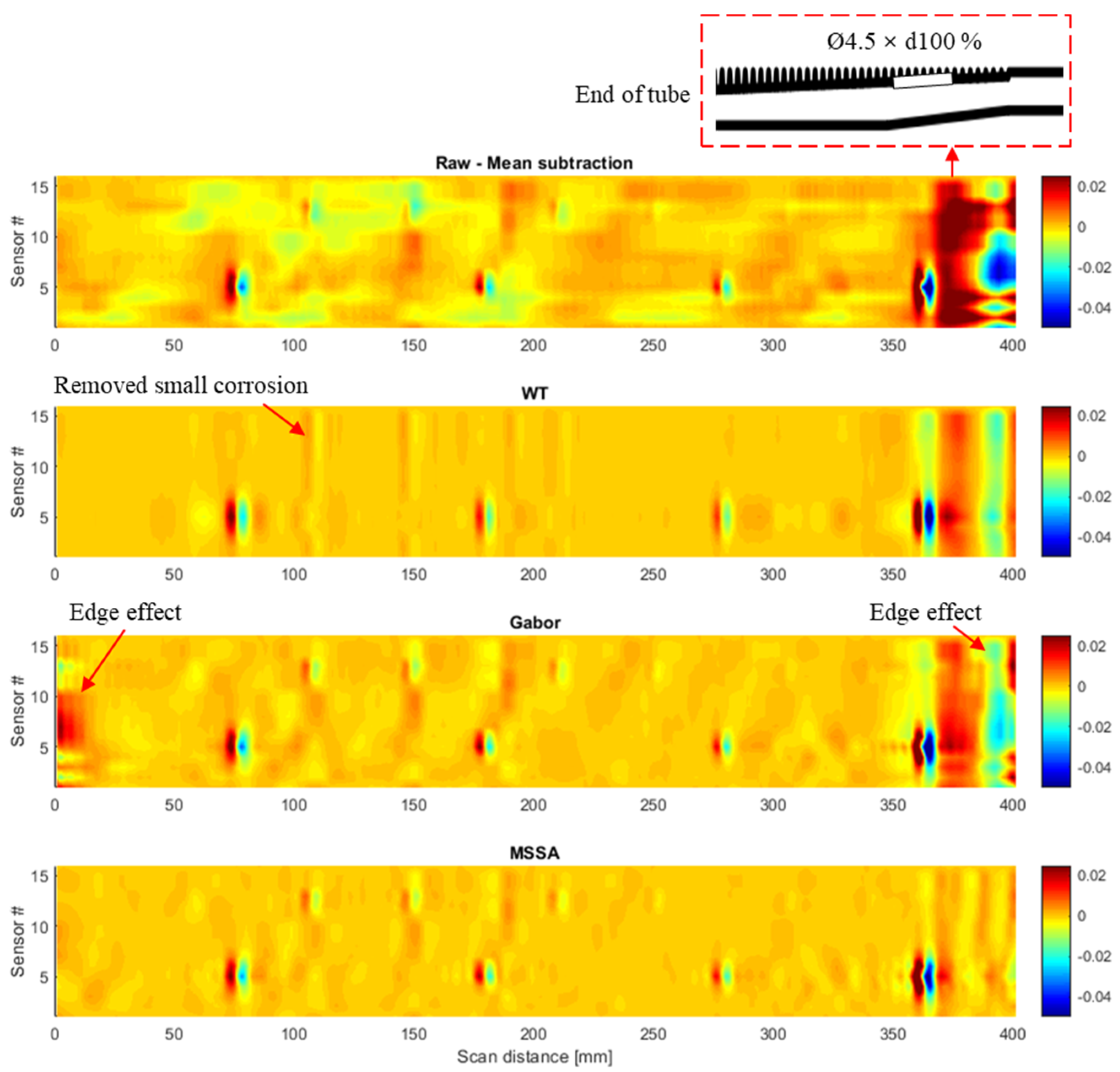
4.2. Magnetic Scanned Image before Filtering
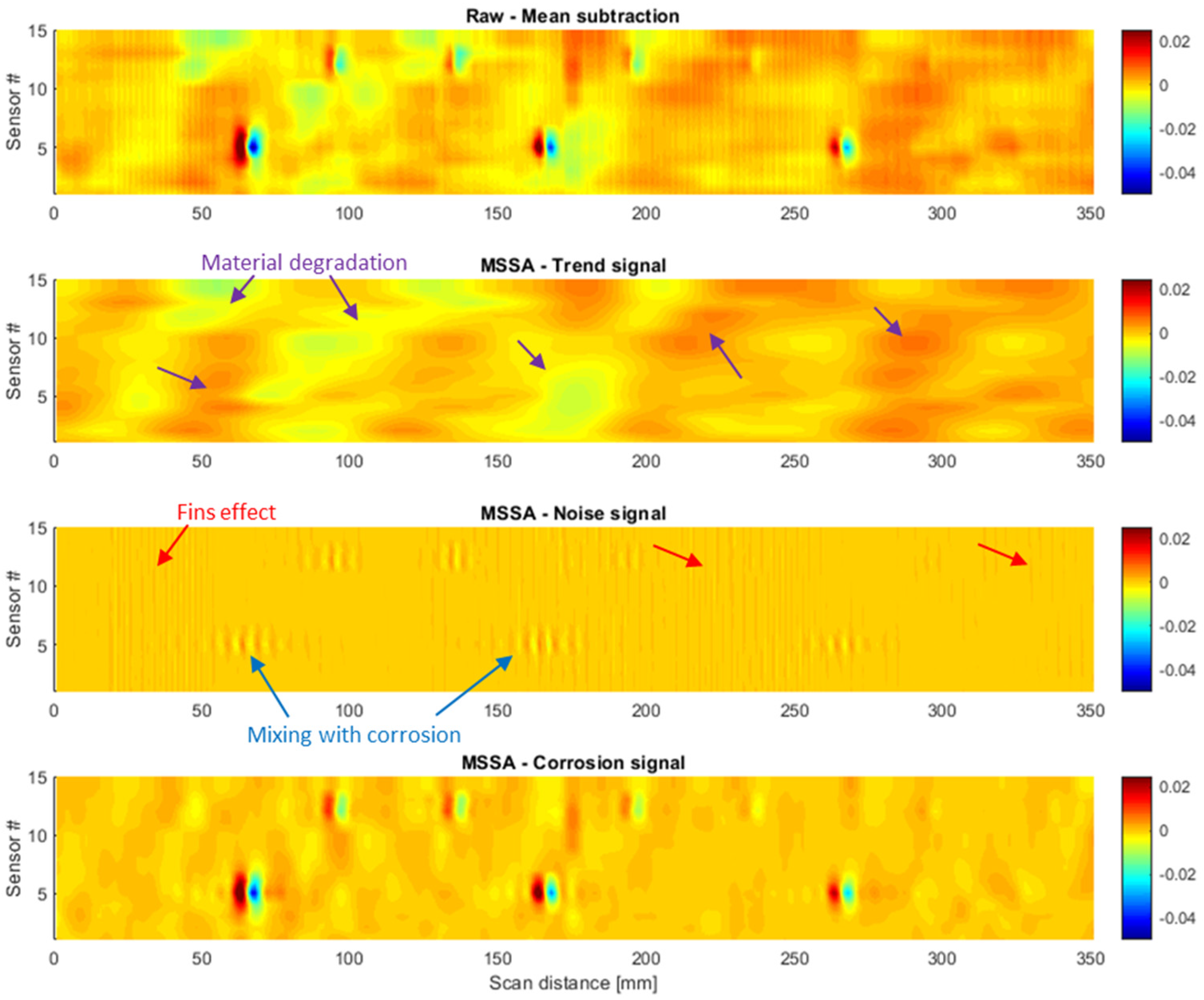
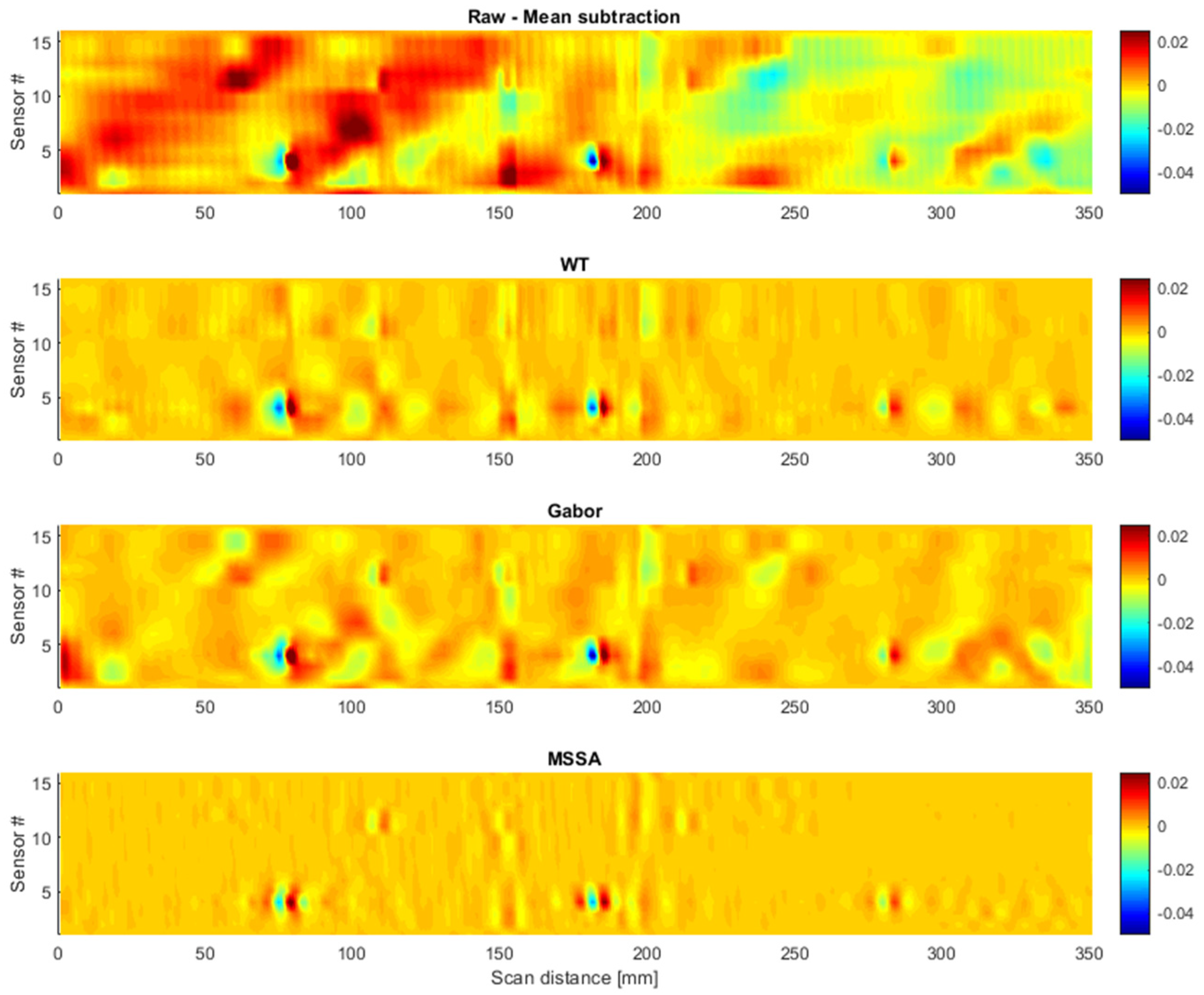
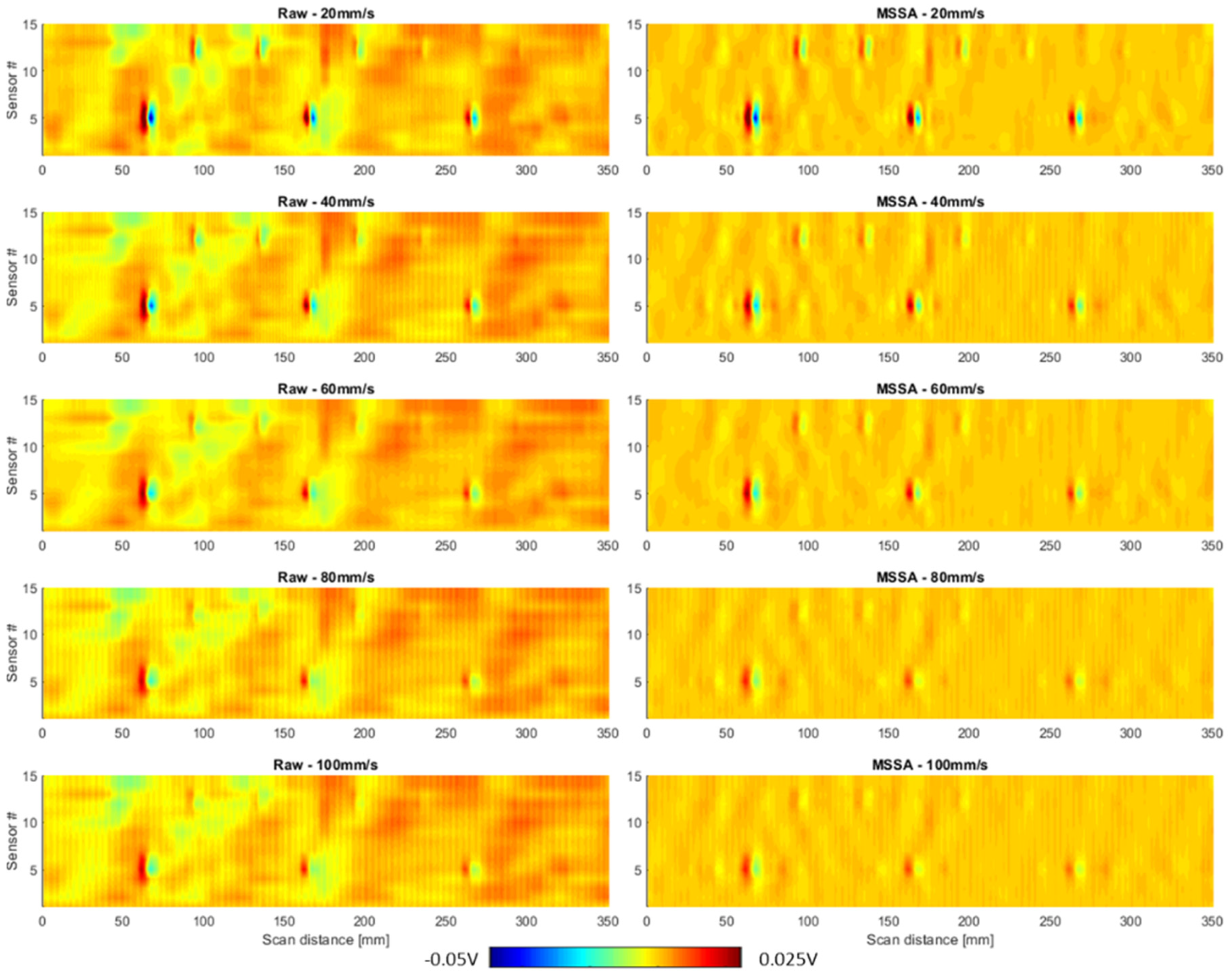
4.3. MSSA Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- EPRI. Moisture Separator Reheater Source Book. Available online: https://www.epri.com/research/products/TR-106345 (accessed on 5 June 2020).
- ASM Handbooks. Electromagnetic Inspection Techniques. In Nondestructive Evaluation of Materials; ASM International: Novelty, OH, USA, 2018; Available online: https://dl.asminternational.org/handbooks/book/55/chapter-abstract/648015/Electromagnetic-Inspection-Techniques?redirectedFrom=fulltext (accessed on 5 June 2020).
- EPRI. Balance-of Plant Heat Exchanger Condition Assessment and Inspection Guide. Available online: https://www.epri.com/research/products/TR-108009 (accessed on 5 June 2020).
- EPRI. Evaluation of the Guided Wave Inspection Technique Using 439 Stainless Steel Finned Tubing. Available online: https://www.epri.com/research/products/GC-109349 (accessed on 5 June 2020).
- Kikuchi, H.; Kurisawa, Y.; Ara, K.; Kamada, Y.; Kobayashi, S. Feasibility study of magnetic flux leakage method for condition monitoring of wall thinning on tube. Int. J. Appl. Electromagn. Mech. 2010, 33, 1087–1094. [Google Scholar] [CrossRef]
- Yusa, N.; Chen, Z.; Miya, K. Quantitative profile evaluation of natural defects in a steam generator tube from eddy current signals. Int. J. Appl. Electromagn Mech. 2000, 12, 139–150. [Google Scholar] [CrossRef]
- Oaten, S.S.; Blitz, J. Impedance analysis for air-cored cylindrical eddy current coils scanning the surfaces of defect-free conductors. Nondestr. Test Eval. 1992, 6, 323–335. [Google Scholar] [CrossRef]
- Gibson, J.N. Use of type 439L stainless steel tubing in moisture separator/reheaters. J. Mater. Energy Syst. 1982, 4, 136–141. [Google Scholar] [CrossRef]
- Lee, H.J.; Cho, C.H.; Nam, M.W. Eddy current testing of type-439 stainless steel tubing using magnetic saturation technique. J. Mech. Sci. Technol. 2012, 26, 2081–2085. [Google Scholar] [CrossRef]
- Xie, S.; Chen, Z.; Zhou, H.; Takagi, T.; Uchimoto, T. Evaluation of Wall Thinning in Carbon Steel Piping Based on Magnetic Saturation Pulsed Eddy Current Testing Method. Stud. Appl. Electromagn. Mech. 2013, 39, 296–303. [Google Scholar]
- Le, M.; Kim, J.; Kim, J.; Do, H.S.; Lee, J. Electromagnetic testing of moisture separator reheater tubes using a bobbin-type integrated Hall sensor array. Int. J. Appl. Electromagn. Mech. 2017, 55, S203–S209. [Google Scholar] [CrossRef]
- Le, M.; Kim, J.; Kim, J.; Do, H.S.; Lee, J. Nondestructive testing of moisture separator reheater tubing system using Hall sensor array. Nondestruct. Test. Eval. 2018, 33, 35–44. [Google Scholar] [CrossRef]
- Le, M.; Kim, J.; Kim, J.; Lee, H.; Lee, J. Signal analysis of a bobbin-type integrated hall sensor array in electromagnetic testing for moisture separator reheater tubes. Int. J. Appl. Electromagn. Mech. 2019, 59, 1535–1542. [Google Scholar] [CrossRef]
- Ramos, H.; Postolache, O.; Alegria, F. Using the skin effect to estimate cracks depths in metallic structures. In Proceedings of the Instrumentation and Measurement Technology Conference, Singapore, 5–7 May 2009; pp. 1361–1366. [Google Scholar]
- Aminghafari, M.; Cheze, N.; Poggi, J.-M. Multivariate de-noising using wavelets and principal component analysis. Comput. Stat. Data Anal. 2006, 50, 2381–2398. [Google Scholar] [CrossRef]
- Bakshi, B. Multiscale PCA with application to MSPC monitoring. AIChE J. 1998, 44, 1596–1610. [Google Scholar] [CrossRef]
- Lv, H.; Teng, J.; Zhang, Y.; An, Q.; Liu, M.; Liang, F.L.; Jing, X.J.; Wang, J.Q. An adaptive-MSSA-based algorithm for detection of trapped victims using UWB radar. IEEE Geosci. Remote. Sens. Lett. 2015, 12, 1808–1812. [Google Scholar] [CrossRef]
- Lee, J.; Jun, J.; Kim, J.; Choi, H.; Le, M. Bobbin-Type Solid-State Hall Sensor Array with High Spatial Resolution for Defects Inspection in Small-Bore Piping Systems. IEEE Trans. Mag. 2012, 48, 3704–3707. [Google Scholar] [CrossRef]
- Le, M.; Lee, J.; Jun, J.; Kim, J. Estimation of sizes of defects on pipes in nuclear power plants using dipole moment and finite element methods. NDT E Int. 2013, 58, 56–63. [Google Scholar] [CrossRef]
- Kim, J.; Le, M.; Lee, J. Eddy current testing and evaluation of far-side corrosion around rivet in jet-engine intake of aging supersonic aircraft. J Nondestr. Eval. 2014, 33, 471–480. [Google Scholar] [CrossRef]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luong, V.S.; Le, M.; Nguyen, K.D.; Le, D.-K.; Lee, J. Electromagnetic Testing of Moisture Separation Reheater Tube based on Multivariate Singular Spectral Analysis. Appl. Sci. 2020, 10, 3954. https://doi.org/10.3390/app10113954
Luong VS, Le M, Nguyen KD, Le D-K, Lee J. Electromagnetic Testing of Moisture Separation Reheater Tube based on Multivariate Singular Spectral Analysis. Applied Sciences. 2020; 10(11):3954. https://doi.org/10.3390/app10113954
Chicago/Turabian StyleLuong, Van Su, Minhhuy Le, Khoa Dang Nguyen, Dang-Khanh Le, and Jinyi Lee. 2020. "Electromagnetic Testing of Moisture Separation Reheater Tube based on Multivariate Singular Spectral Analysis" Applied Sciences 10, no. 11: 3954. https://doi.org/10.3390/app10113954
APA StyleLuong, V. S., Le, M., Nguyen, K. D., Le, D.-K., & Lee, J. (2020). Electromagnetic Testing of Moisture Separation Reheater Tube based on Multivariate Singular Spectral Analysis. Applied Sciences, 10(11), 3954. https://doi.org/10.3390/app10113954