Nondestructive Detection of Gaps between Railway Track Slabs and Soil Foundation Using Leaked Air Waves


Abstract
:Featured Application
Abstract
1. Introduction
2. Signal Processing
Short-Time Fourier Transform
3. Finite Element Analysis of a Railway Track Slab with a Gap
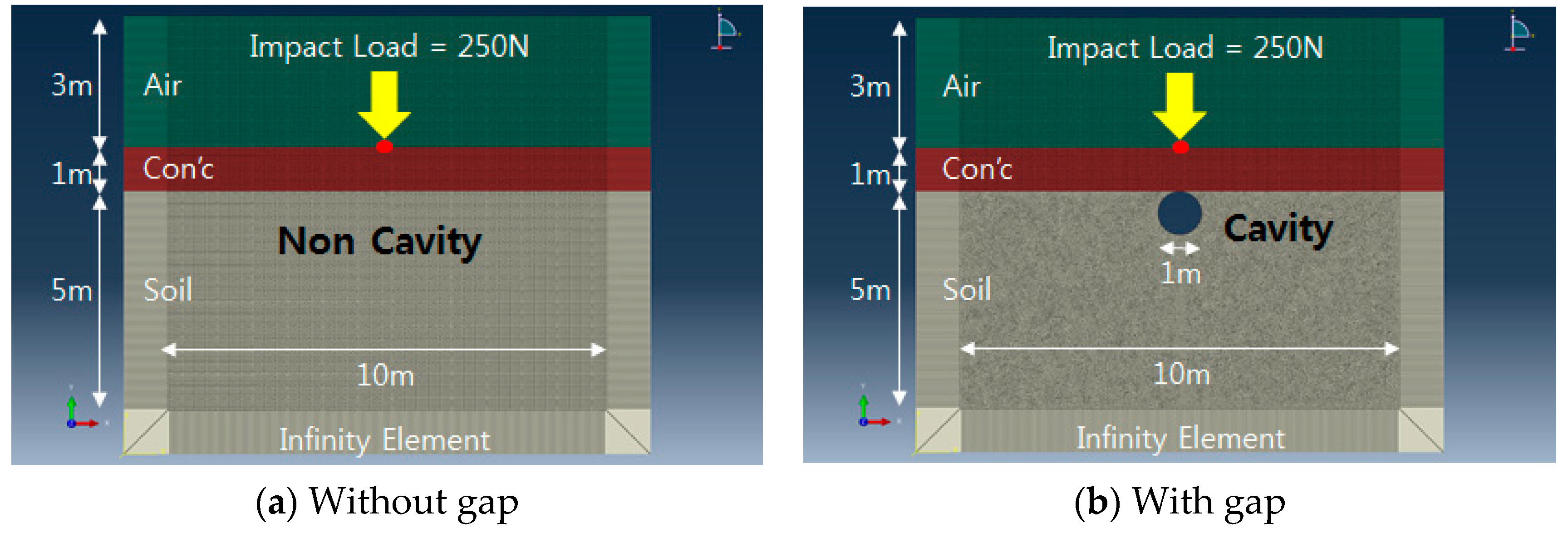
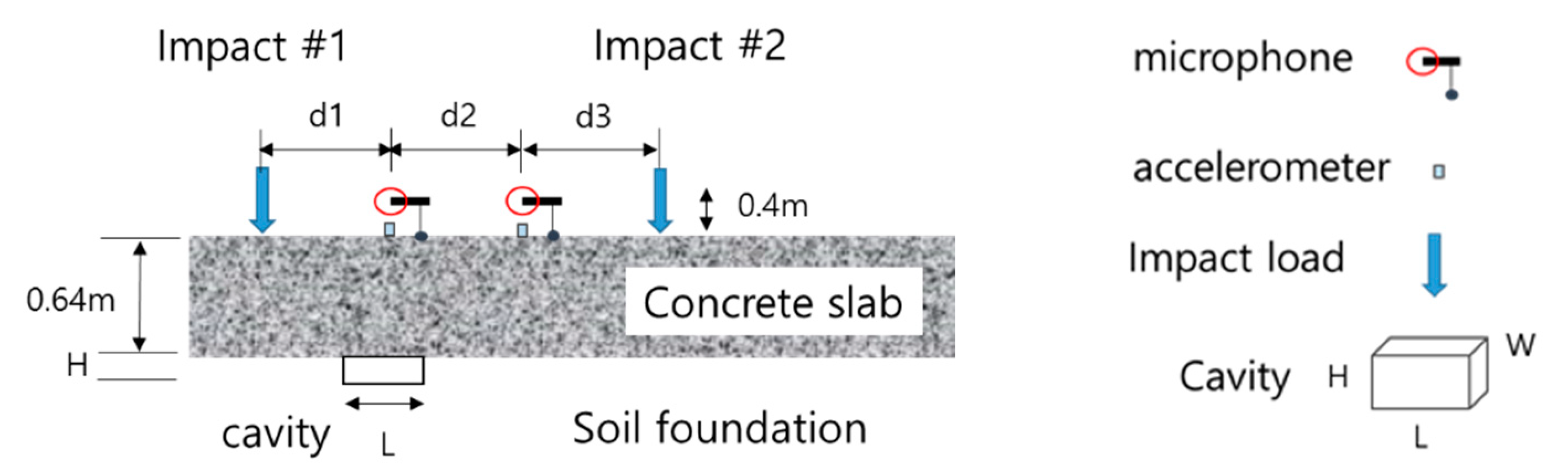
3.1. Numerical Modeling of Track Slab
3.2. Analysis of Computed Results by Finite Element Analysis
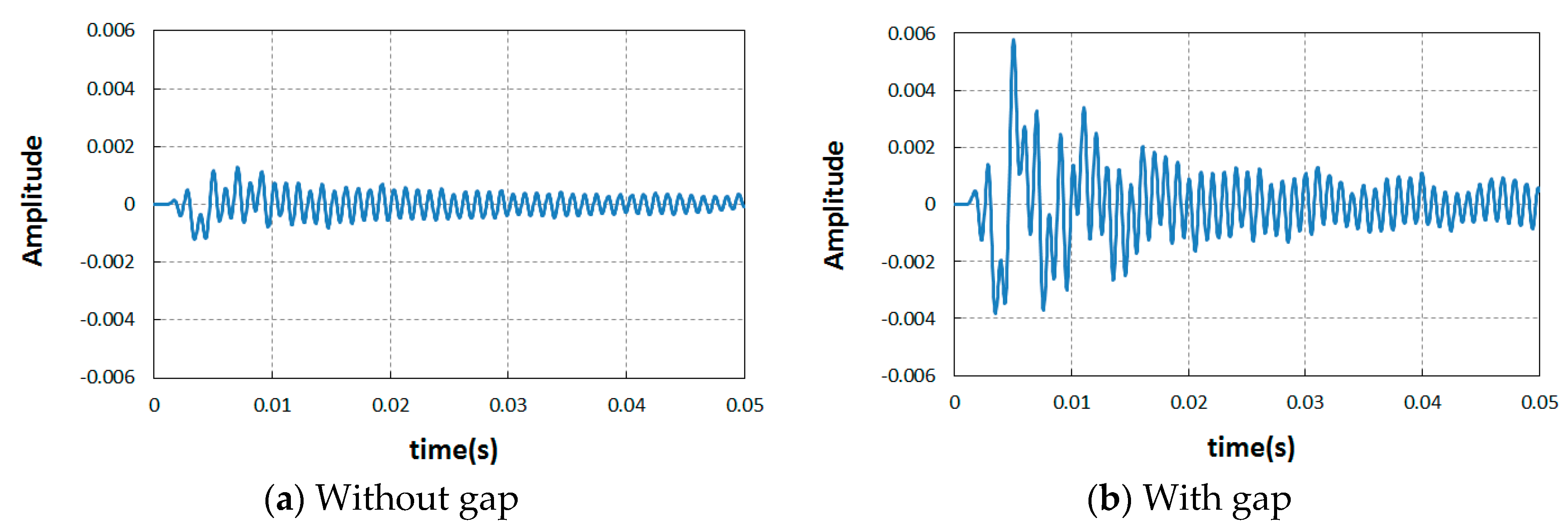
3.2.1. Comparison of Acceleration Level with Time
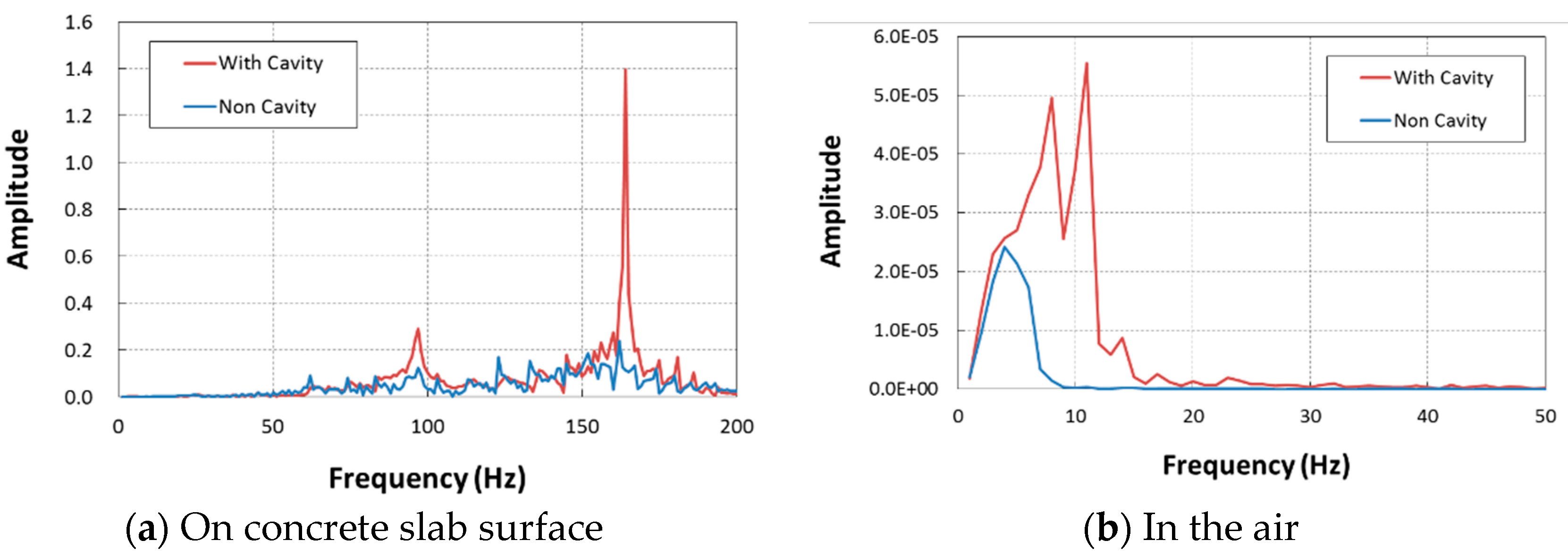
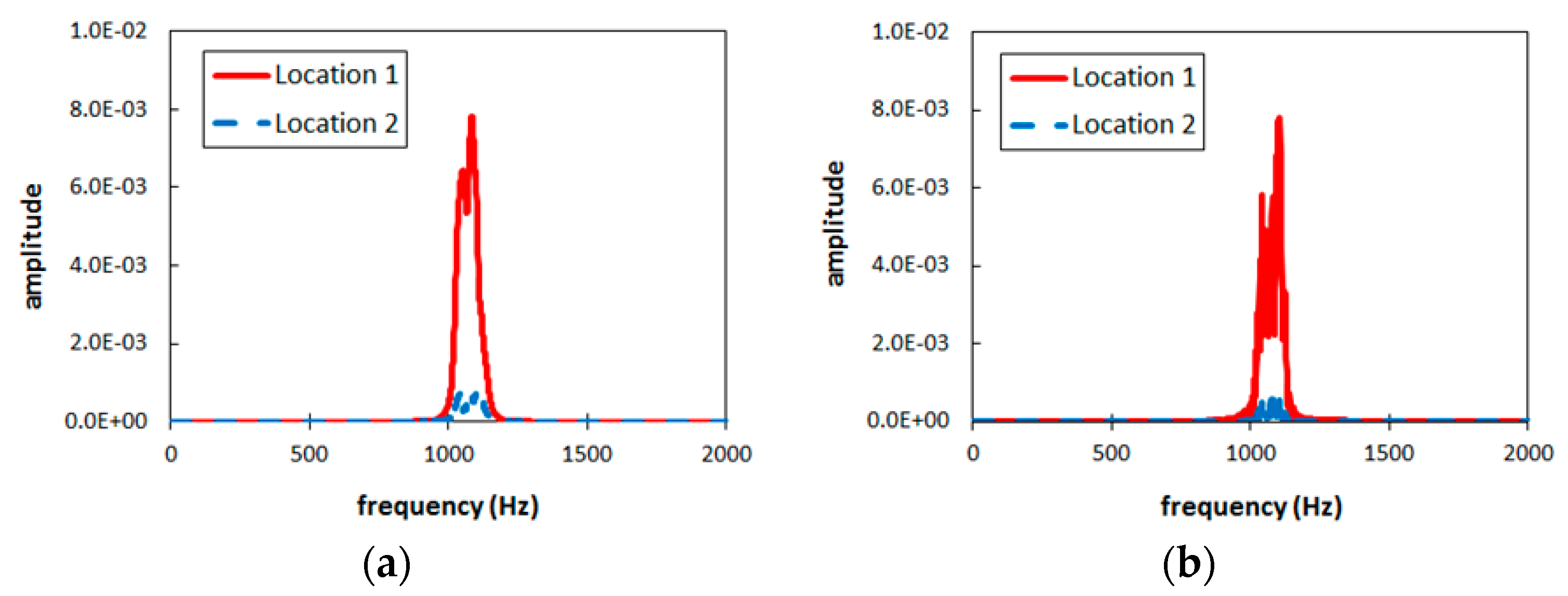
3.2.2. Comparison of Acceleration Level in Frequency Domain
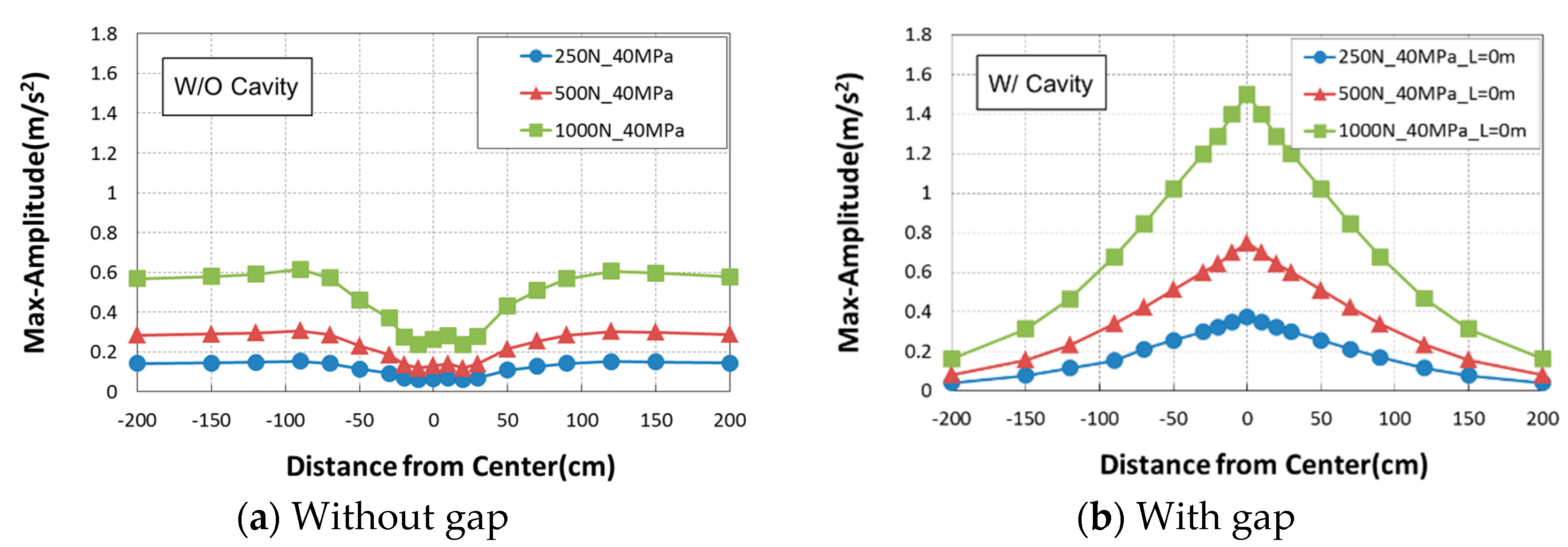
3.2.3. Comparison of Maximum Acceleration Level
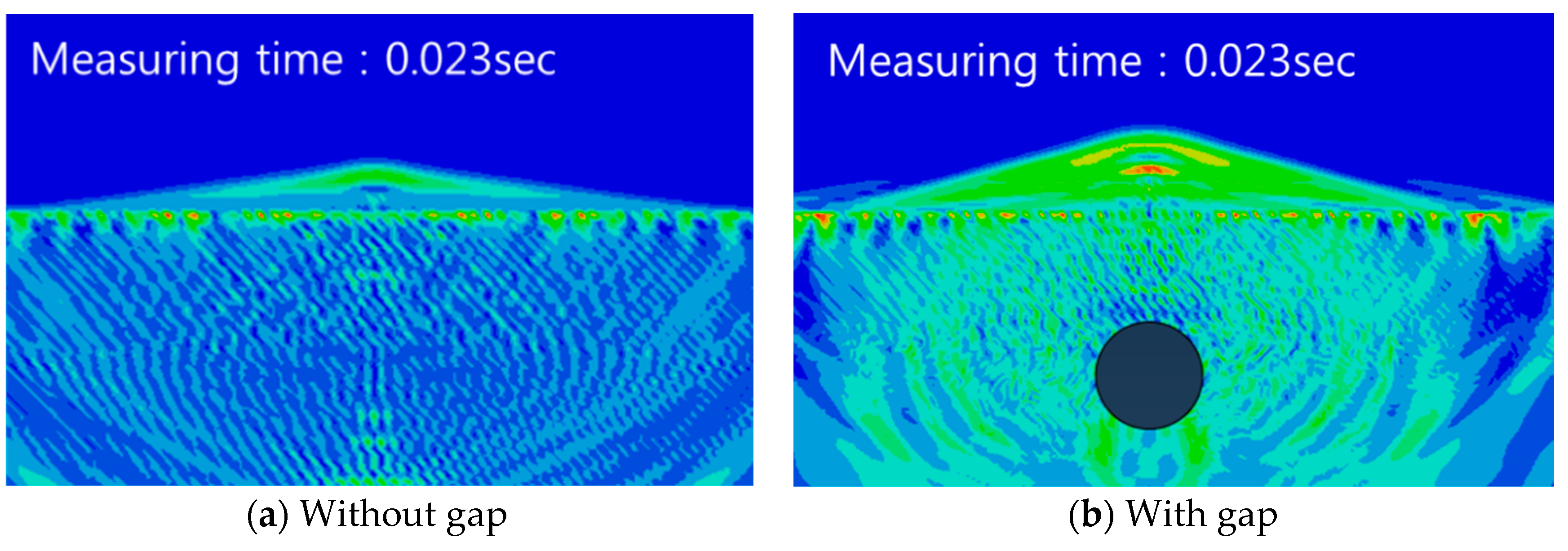
3.2.4. Contours of Acceleration Level in Slab and Air
3.2.5. Comparison of Wavelets and Autospectrum of Acceleration in Slab
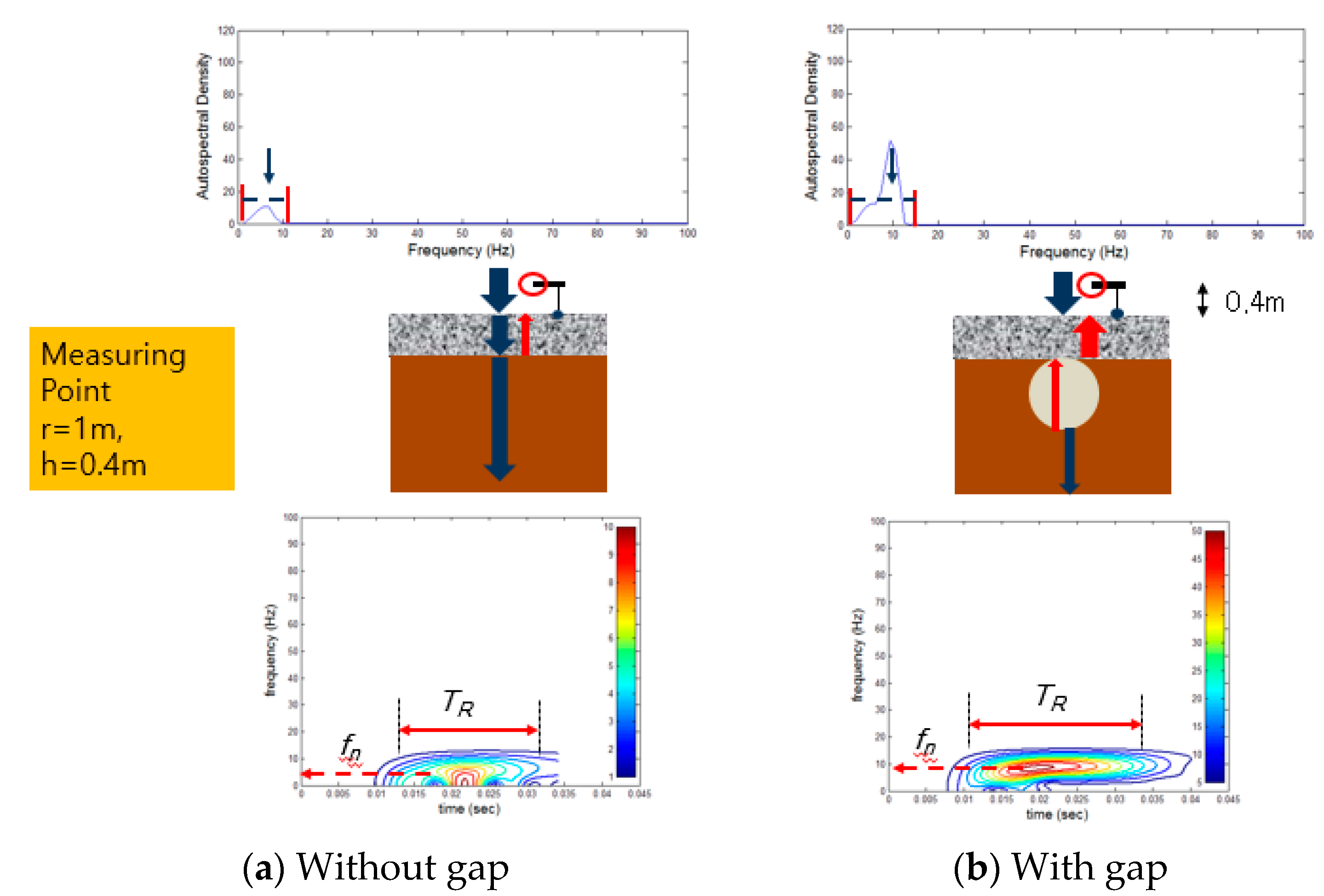
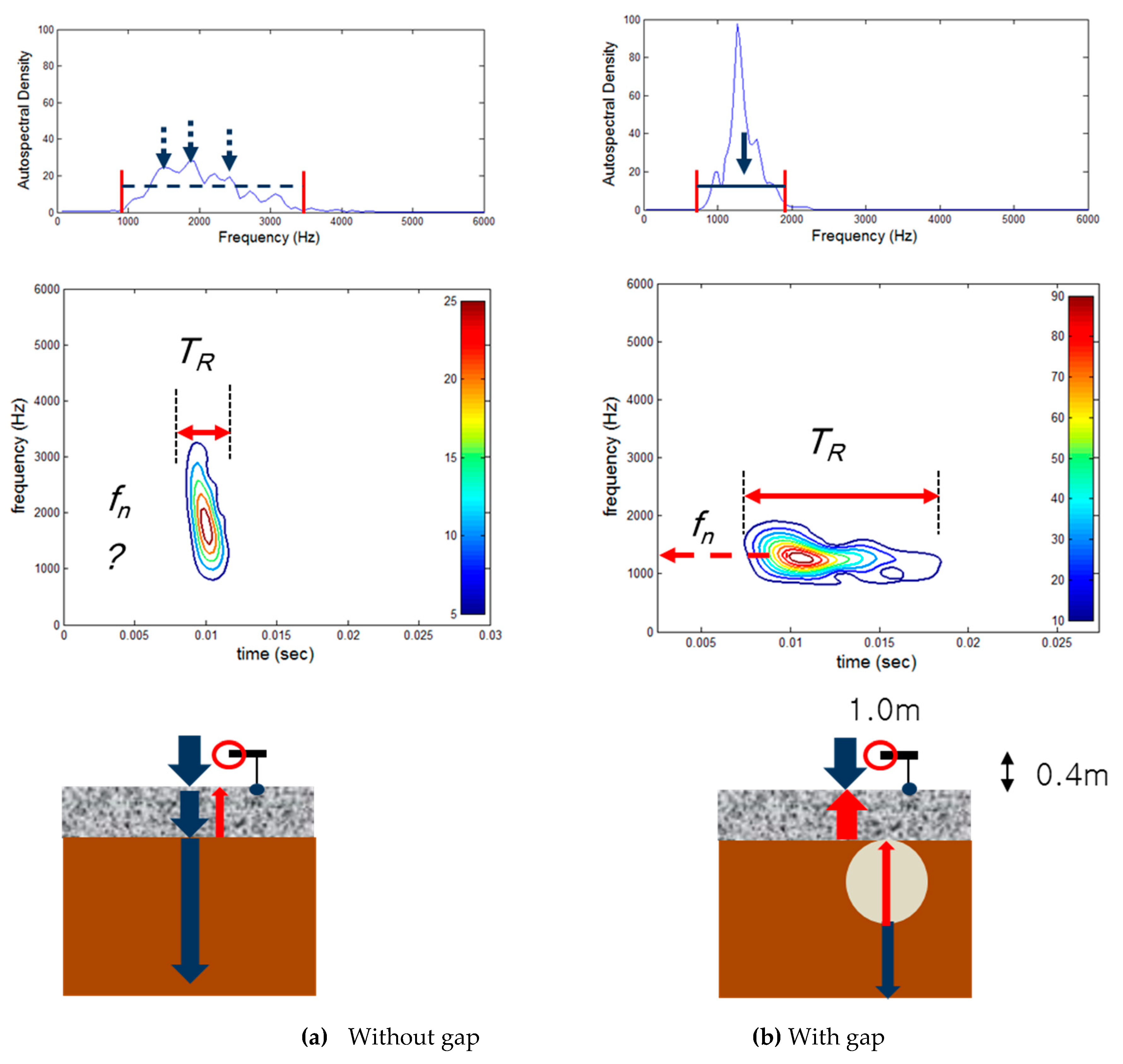
3.2.6. Comparison of Wavelets and Autospectrum of Acceleration in Air
4. Field Test on a Model Railway Track Slab with a Gap
4.1. Model Track Slab and LRAW Pilot Test System
4.2. Comparison of Acceleration Amplitude
4.3. Comparison of Wavelets and Autospectrum of Acceleration in Air
5. Discussion
- (1)
- From computed results by FEA simulation of NDT in cases of with and without a gap, considerable waves were transmitted into the air to be detected after the waves were reflected at the boundaries around the gap in the soil ground. Characteristics of wave transmission were investigated in detail by analyzing wavelet distribution and autospectrum density.
- (2)
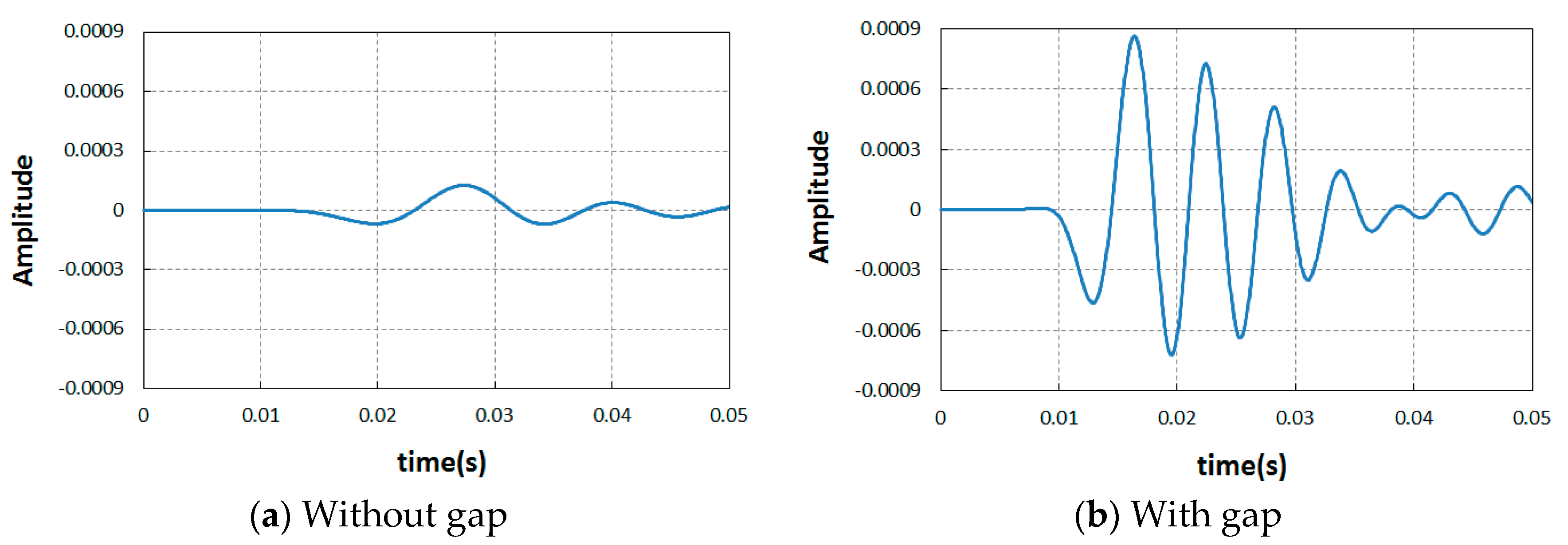
- At first, considering the computed results of FEA, based on comparison of acceleration level in frequency domain for two cases of with and without a gap, it was found that the leaked Rayleigh waves into air provided a much lower level than those captured on the concrete surface. However, in the case of gap existence, the peak values of the case with a cavity were two times larger than those of the case without a gap.
- (3)
- On the concrete surface, the predominant resonant frequency was generated around 170 Hz. On the other hand, the resonant frequency of the Rayleigh waves transmitted into air in the case of gap existence was generated at 7 to 12 Hz, which was much lower than the range at concrete surface. Compared to the concrete surface, relatively weak reflected waves were transmitted into the air in the cases of with or without the gap. However, a considerable number of waves were transmitted into the air to be detected after the waves were reflected at the boundaries around the gap in the soil ground. Wave amplitude generated in the gap case provided a more prominent peak and was distributed over a wider range of frequency than that in the non-gap case.
- (4)
- After applying an impact load on the concrete slab surface, the maximum acceleration amplitude generated in the air was investigated. Much higher maximum amplitudes were generated intensively near the impact loading point in the case of with a gap as opposed to without a gap. These phenomena were found also in contours of acceleration level in the slab and the air.
- (5)
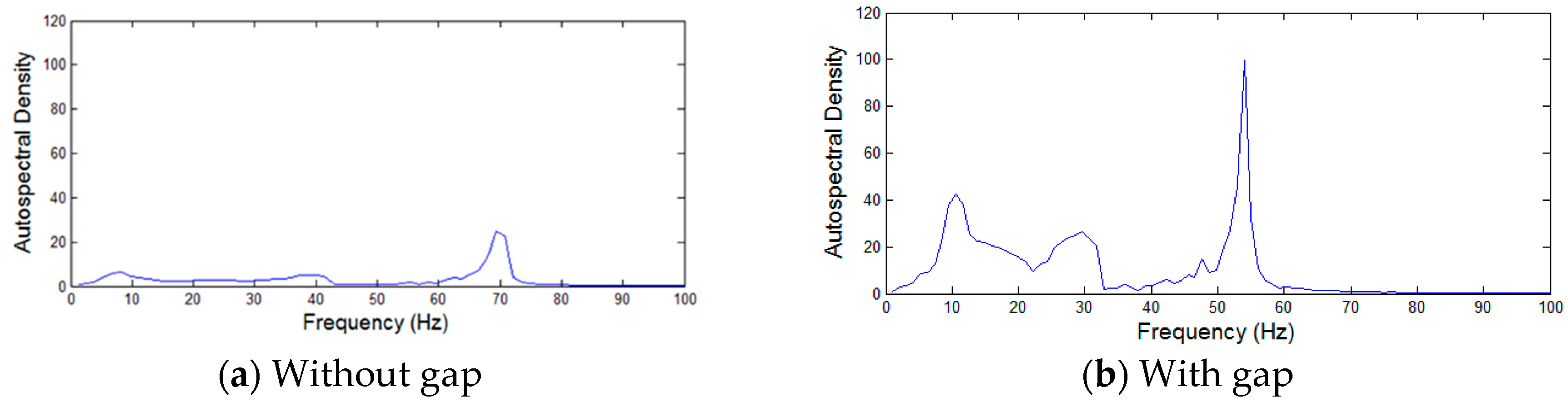
- Based on the autospectral density of the acceleration, it was found that a few modes of resonance were generated due to reflections of waves at the boundaries around the gap in the soil ground. A sharper and higher peak of autospectral density at a resonance frequency is observed in the case of with a gap.
- (6)
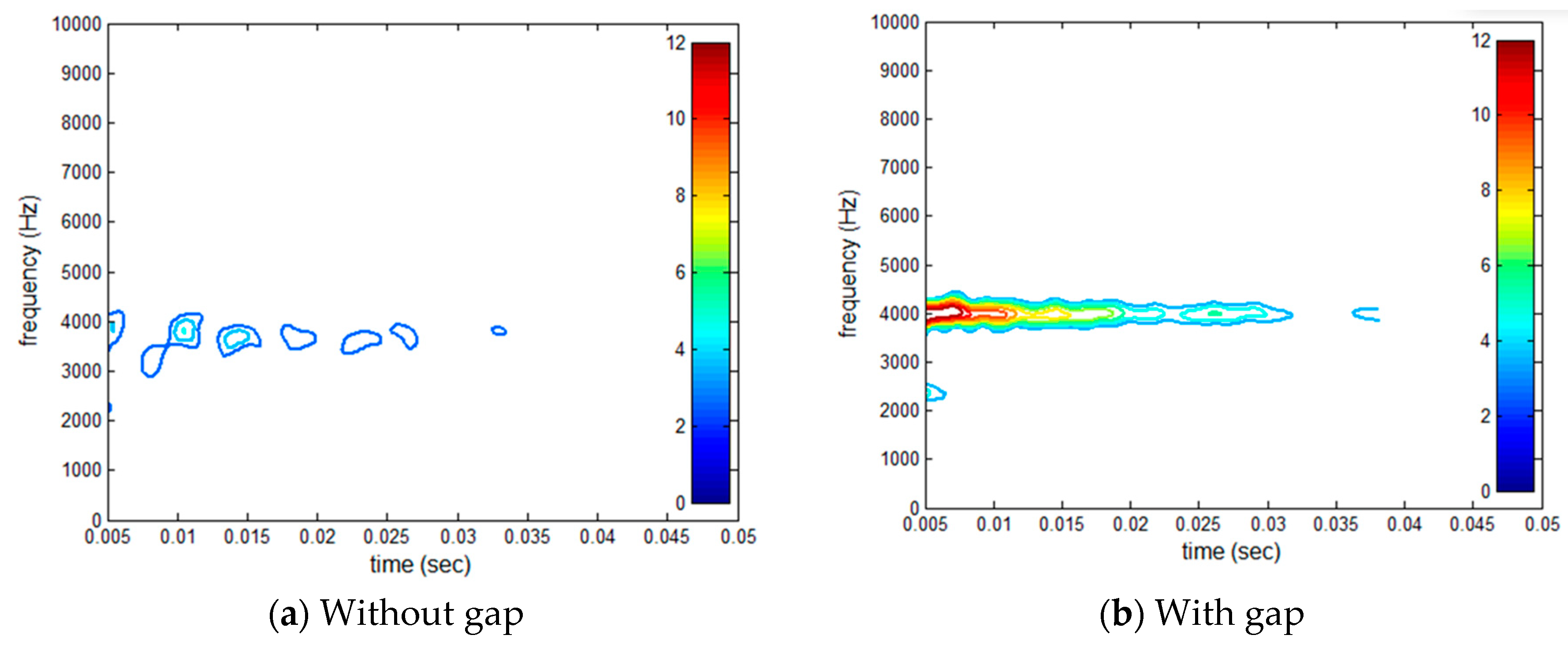
- In case of gap existence, longer and higher wavelets of leaky Rayleigh acoustic waves were obtained than without case. Resonance frequency is higher also than without case. Thus, it could be confirmed from the analyzed results of the FEA for the model railway track slab that the presence of a gap below the slab is more easily identified using the LRAW method than using an accelerometer installed on the surface.
- (7)
- A long rectangular model concrete slab with three different sizes of gap was constructed in a rural field site. Impact load test was performed on the model concrete slab. The wavelets of leaky Rayleigh acoustic waves were extended in time axis direction much longer in the case of with a gap. Relatively higher densities of wavelets were also observed in the case of with a gap. Resonance frequency was focused in a shorter range than that of the case without a gap. Thus, it can be confirmed from the analysis of the field test for the model railway track slab with and without a gap that the presence of a gap below the slab is easily identified using the LRAW method.
- (8)
- It was verified form the FEA and NDT test in the field that the new NDT test system based on LRAW could be successfully adapted for detecting gaps underneath railway track slabs and trackbed soil.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Esveld, C. Recent developments in slab track. Eur. Railw. Rev. 2003, 2, 81–85. [Google Scholar]
- Park, S.B.; Lim, Y.; Lim, N. On-site applicability evaluation of concrete track defect measurement system for inspection of gaps and abnormalities of concrete slab in railway track. J. Korean Soc. Railw. 2019, 22, 719–729. [Google Scholar] [CrossRef]
- ACI. Committee 228. Non-Destructive Test Methods for Evaluation of Concrete in Structures Report ACI 228.2R-98; American Concrete Institute: Farmington Hills, MI, USA, 1998. [Google Scholar]
- Nazarian, S.; Baker, M.; Crain, K. Assessing quality of concrete with wave propagation techniques. ACI Mater. J. 1997, 94, 296–305. [Google Scholar]
- Sansalone, M.; Carino, N. Detecting delaminations in concrete slabs with and without overlays using the impact-echo method. ACI Mater. J. 1989, 86, 175–184. [Google Scholar]
- Zhang, J.-K.; Yan, W.; Cui, D.-M. Concrete condition assessment using impact-echo method and extreme learning machines. Sensors 2016, 16, 447. [Google Scholar] [CrossRef] [PubMed]
- Ozturk, T.; Rapoport, J.; Popovics, J.; Shah, S. Monitoring the setting and hardening of cement-based materials with ultrasound. RILEM Concr. Sci. Eng. 1999, 1, 83–91. [Google Scholar]
- Pessiki, S.; Carino, N. Setting time and strength of concrete using the impact-echo method. ACI Mater. J. 1988, 85, 389–399. [Google Scholar]
- Gucunski, N.; Maher, A.; Ghasemi, H. Extending Life of Concrete Bridge Decks through Early Deterioration Detection by NDE Methods. In Proceedings of the 2nd International Conference on Road and Rail Infrastructure (CETRA 2012), Dubrovnik, Croatia, 7–9 May 2012. [Google Scholar]
- Schabowicz, K. Non-Destructive Testing of Materials in Civil Engineering. Materials 2019, 12, 3237. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wright, W.; Hutchins, D. Air-coupled ultrasonic testing of metals using broadband pulses in through-transmission. Ultrasonics 1999, 37, 19–22. [Google Scholar] [CrossRef]
- Cho, H.; Park, S.; Park, J.; Kwon, S.; Lim, Y. Inspection of gaps and abnormalities of concrete slab in railway track by using impact echo test and wavelet transform analysis. J. Korean Soc. Railw. 2017, 20, 795–808. [Google Scholar] [CrossRef]
- Ngo, V.; Park, J.; Park, S.; Lim, Y. Inspection of gaps and abnormalities of concrete slab in railway track by using impact echo test and wavelet transform analysis. Int. J. Railw. 2017, 10, 15–19. [Google Scholar] [CrossRef]
- Epp, T. Air-Coupled Impact-Echo Damage Detection in Reinforced Concrete Using Wavelet Transforms. Master’s Thesis, The University of Manitoba, Winnipeg, MB, Canada, 2017. [Google Scholar]
- Nikos, E.; Kritikakis, G. Attenuation analysis of real GPR wavelets: The equivalent amplitude spectrum (EAS). J. Appl. Geophys. 2016, 126, 13–26. [Google Scholar]
- Alsharahi, G.; Faize, A.; Louzazni, M.; Mostapha, A.; Bayjja, M.; Driouach, A. Detection of cavities and fragile areas by numerical methods and GPR application. J. Appl. Geophys. 2019, 164, 225–236. [Google Scholar] [CrossRef]
- Gabor, D. Theory of communication. J. IEEE 1946, 93, 429–457. [Google Scholar] [CrossRef]
- Cohen, L. Time-Frequency Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Santamarina, J.C.; Fratta, D. Discrete Signals and Inverse Problems; John Wiley & Sons Ltd: West Sussex, UK, 2005. [Google Scholar]
- Song, K.I. Evaluation and Analysis Methods for Key Elements Affecting Tunnel Behaviour—Spatial Variability, Shotcrete Bonding State, Pre-Reinforcement. Ph.D. Thesis, KAIST, Daejeon, Korea, 2009. [Google Scholar]
- Simulia. User’s Manual for ABAQUS; Dassault Systems: Johnston, RI, USA, 2016. [Google Scholar]
- Ji, S.H. Analysis of Trackbed Foundation Stability Using Response Spectrum Generated by Railway Car in Subway. Master’s Thesis, Paichai University, Daejeon, Korea, 2017. (In Korean). [Google Scholar]
- Sansalone, M.; Streett, W. Impact-Echo: Non-Destructive Evaluation of Concrete and Masonry; Bullbrier Press: Jersey Shore, PA, USA, 1997. [Google Scholar]
- Villiappan, S.; Murti, V. Finite Element Constraints in the Analysis of Wave Propagation Problem UNICV Report NO. R-218; The University of New South Wales, The School of Civil Engineering: Kingsford, Australia, 1984. [Google Scholar]
- Saenger, E.H.; Gold, N.; Shapiro, S.A. Modeling the propagation of Elastic waves using a modified finite-difference grid. Wave Motion 2000, 31, 77–92. [Google Scholar] [CrossRef]
- Cho, H. Development of NDT Test Module of Detecting Gap under Railway Track Slab; Research Report to KORAIL; Total Geo Solution: Daejeon, Korea, 2016. (In Korean) [Google Scholar]
- Zerwer, A.; Cascante, G.; Hutchinson, J. Parameter estimation in finite element simulations of Rayleigh waves. J. Geotech. Geoenviron. Eng. 2002, 128, 250–261. [Google Scholar] [CrossRef]
- MATLAB, The Mathworks, Inc.: Natick, MA, USA, 2017.
- ASTM C127. Standard Test Method for Relative Density (Specific Gravity) and Absorption of Coarse Aggregate; ASTM International: West Conshohocken, PA, USA, 2015. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulus E (MN/m2) | Poisson’s Ratio ν | Density ρ (kg/m3) | |
|---|---|---|---|
| Air | 0.1 | 0.4 | 1.130 |
| Concrete Slab | 30,000 | 0.2 | 2300 |
| Soil | 40 | 0.3 | 2000 |
| Specific Gravity | Absorption Ratio (%) | LA Coefficient (%) | |
|---|---|---|---|
| Fine aggregate | 2.56 | 1.10 | - |
| Coarse aggregate | 2.65 | 0.70 | 18.8 |
| W/C | S/a | Mix Proportions (kg/m3) | ||||
|---|---|---|---|---|---|---|
| W | C | S | Agg | Admixture | ||
| 0.39 | 45.3 | 187 | 480 | 739 | 894 | 4.8 |
| D1 (m) | D2 (m) | D3 (m) | |
|---|---|---|---|
| Sensing position | 0.5 | 0.5 | 0.5 |
| 1.0 | 1.0 | 1.0 | |
| L (m) | W (m) | H (m) | |
| Gap size | 0.1 | 0.1 | 0.1 |
| 0.3 | 0.3 | 0.1 | |
| 0.4 | 0.3 | 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Cho, H.; Lim, Y. Nondestructive Detection of Gaps between Railway Track Slabs and Soil Foundation Using Leaked Air Waves. Appl. Sci. 2020, 10, 3347. https://doi.org/10.3390/app10103347
Park S, Cho H, Lim Y. Nondestructive Detection of Gaps between Railway Track Slabs and Soil Foundation Using Leaked Air Waves. Applied Sciences. 2020; 10(10):3347. https://doi.org/10.3390/app10103347
Chicago/Turabian StylePark, Seongbaek, Hojin Cho, and Yujin Lim. 2020. "Nondestructive Detection of Gaps between Railway Track Slabs and Soil Foundation Using Leaked Air Waves" Applied Sciences 10, no. 10: 3347. https://doi.org/10.3390/app10103347
APA StylePark, S., Cho, H., & Lim, Y. (2020). Nondestructive Detection of Gaps between Railway Track Slabs and Soil Foundation Using Leaked Air Waves. Applied Sciences, 10(10), 3347. https://doi.org/10.3390/app10103347