Line-Detection Based on the Sum of Gradient Angle Differences


Abstract
1. Introduction
2. Related Work
3. Proposed Line-Detection Method
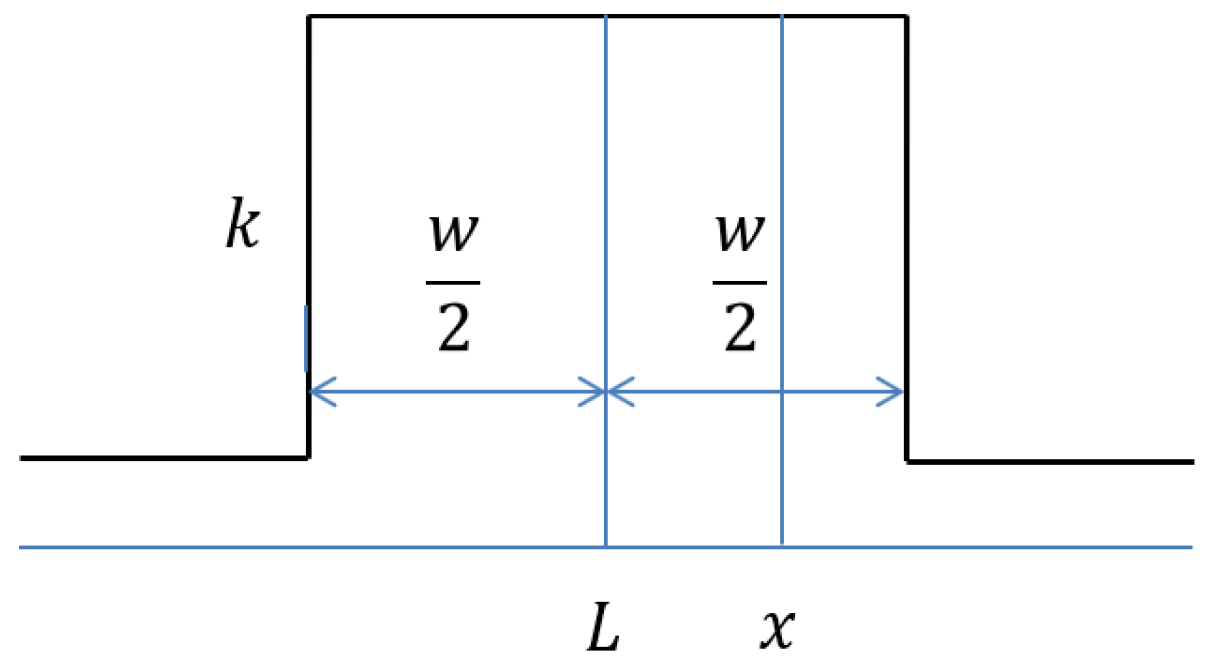
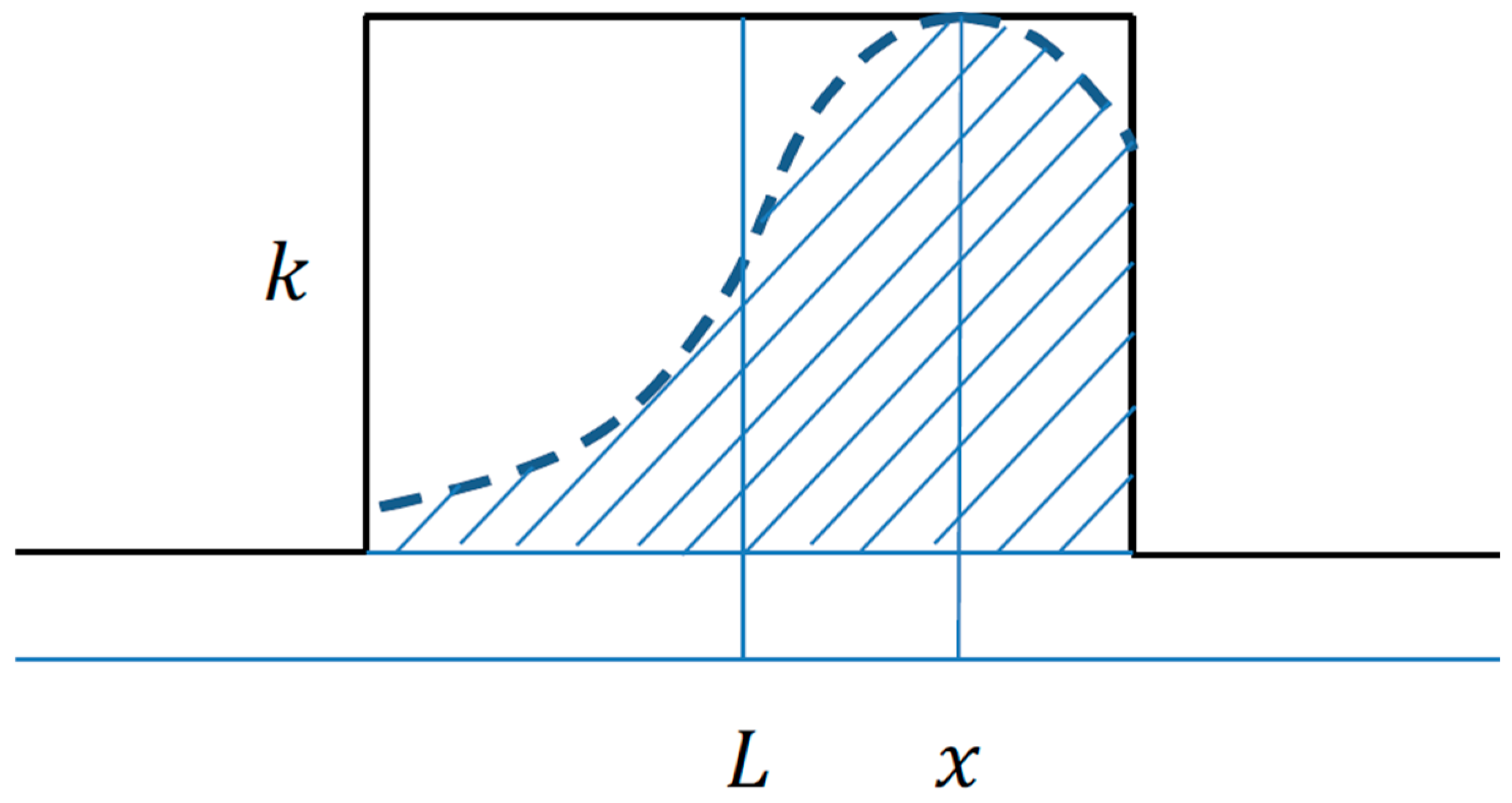
3.1. Line Model
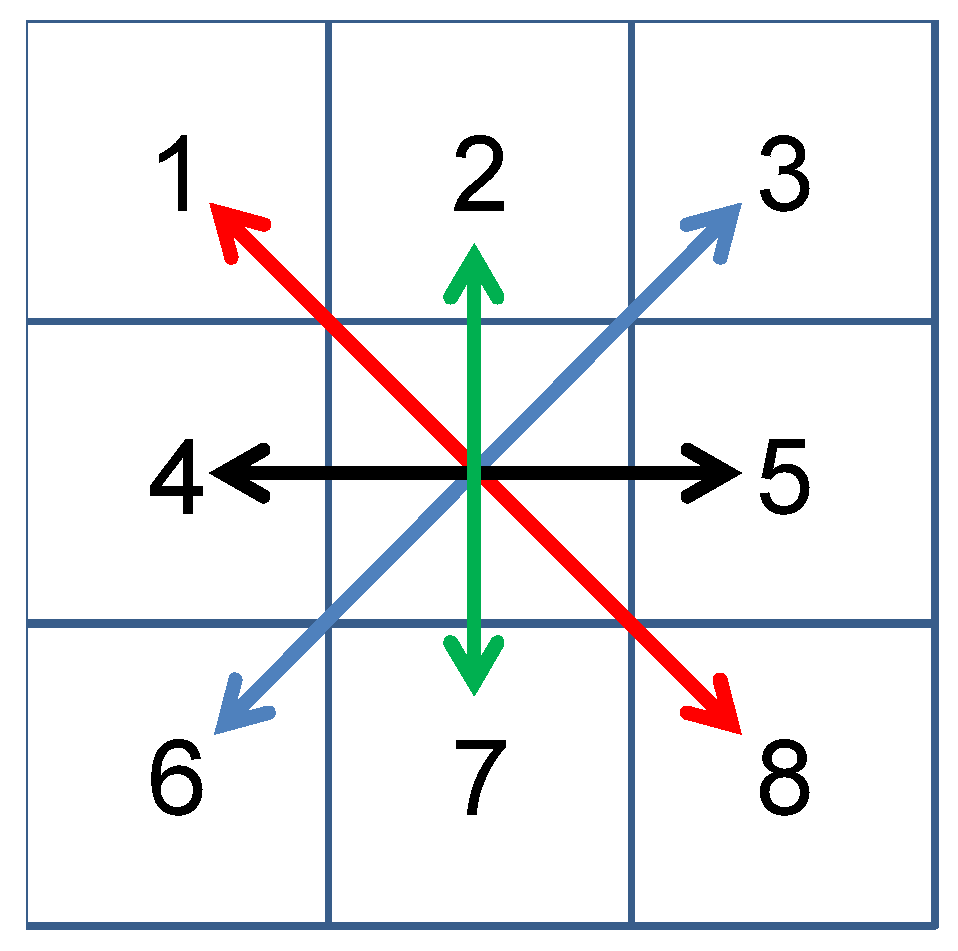
3.2. Definition of SGAD
3.3. Classification of Line Pixels into Ridge and Valley, and Suppression of Non-Maxima
4. Line-Detection Experiments with Simulated Images
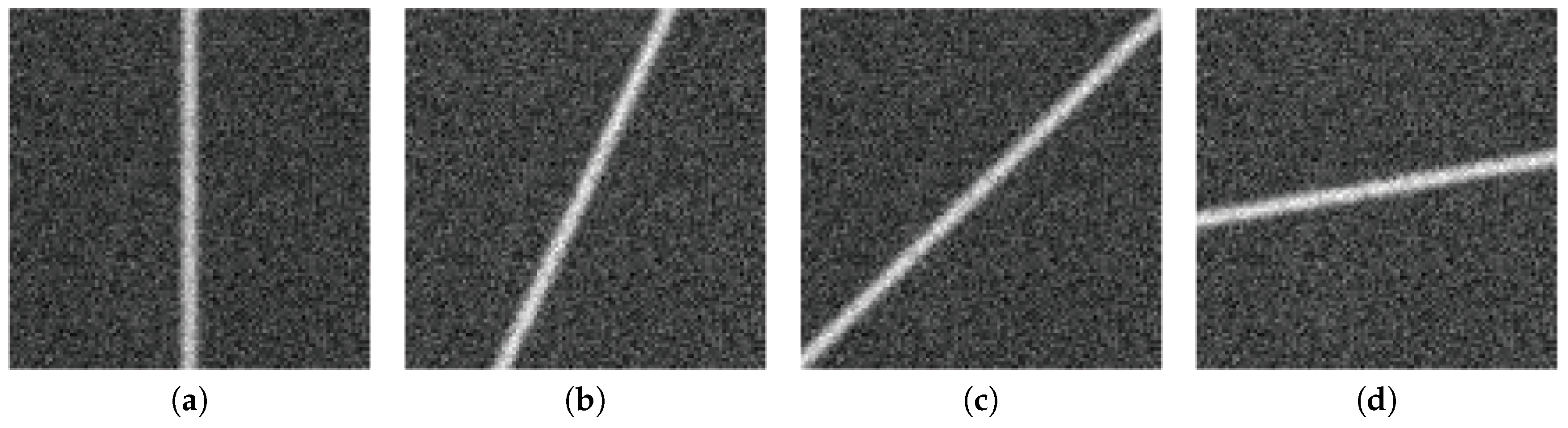
4.1. Generation of Simulated Images
4.2. Special Simulation Tests
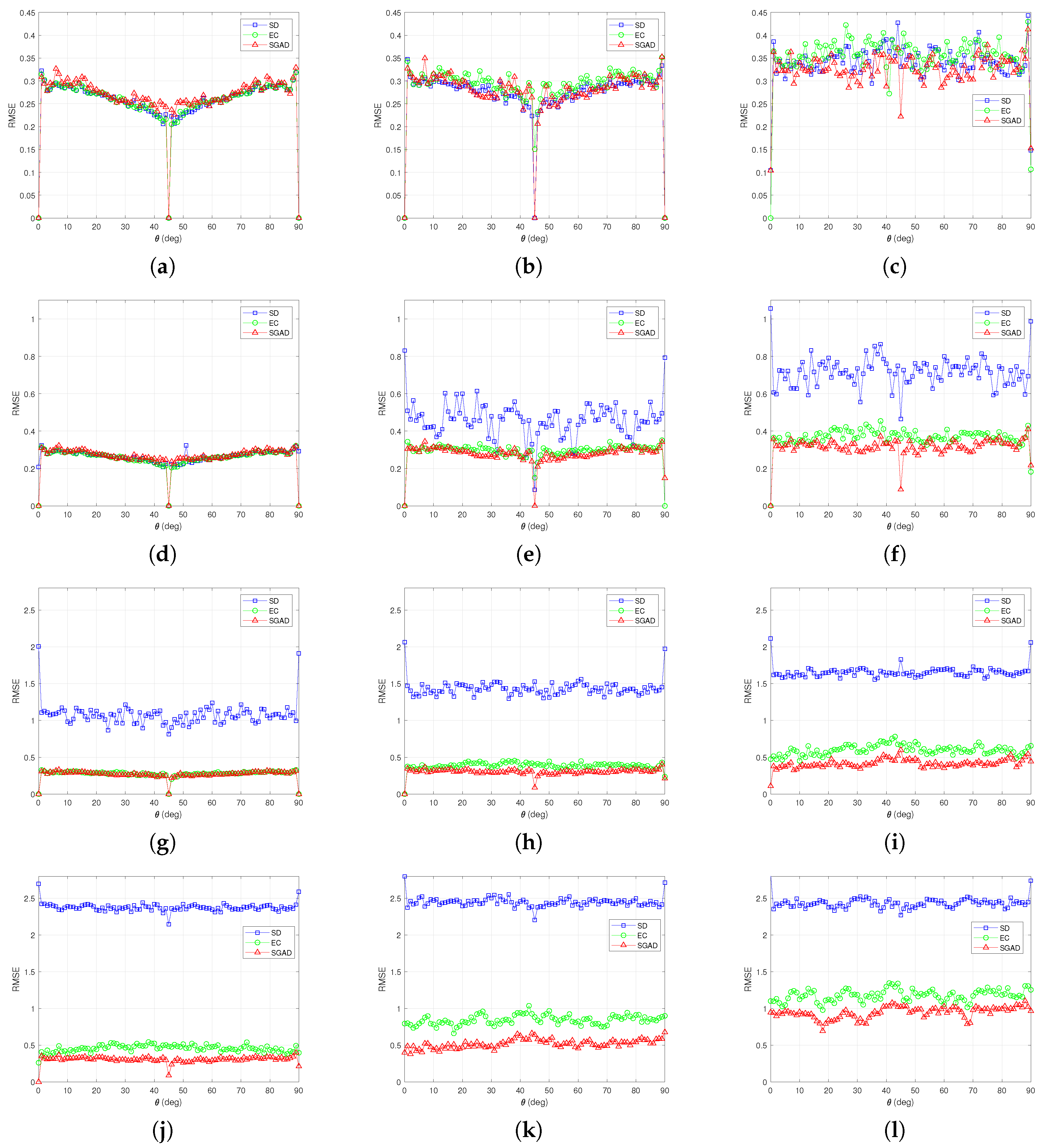
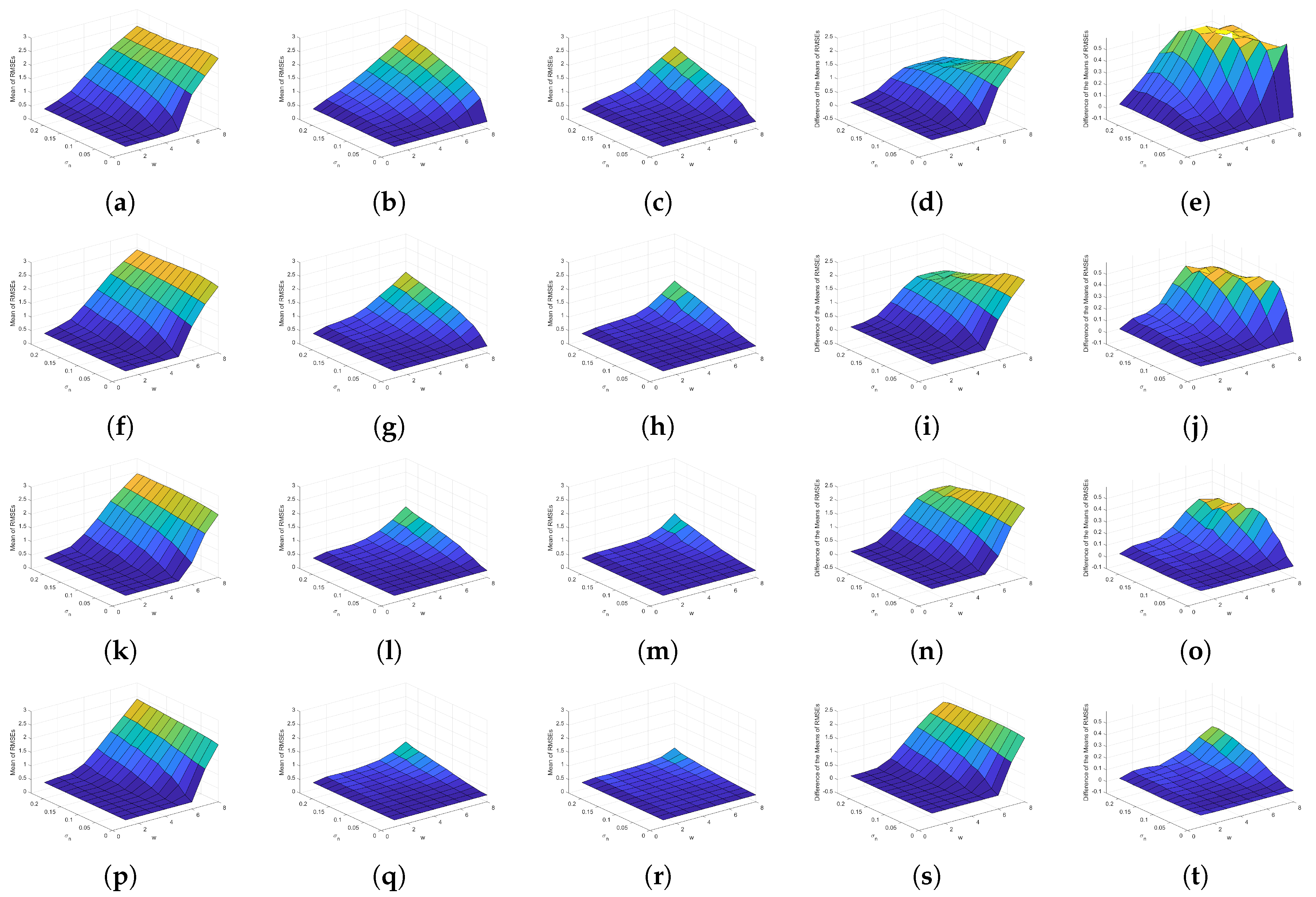
4.3. General Simulation Tests
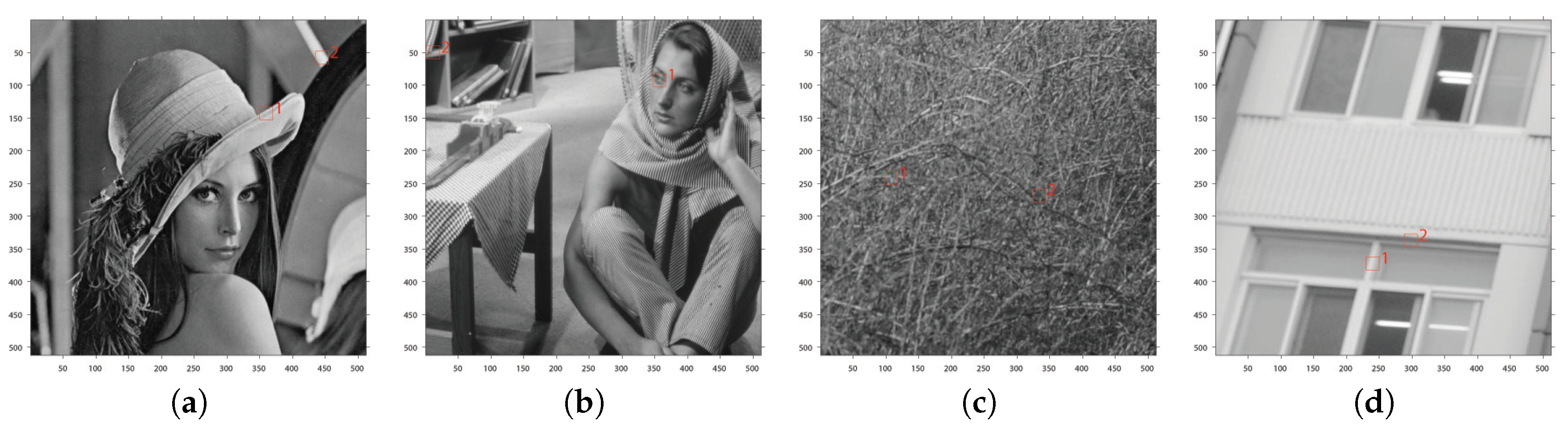
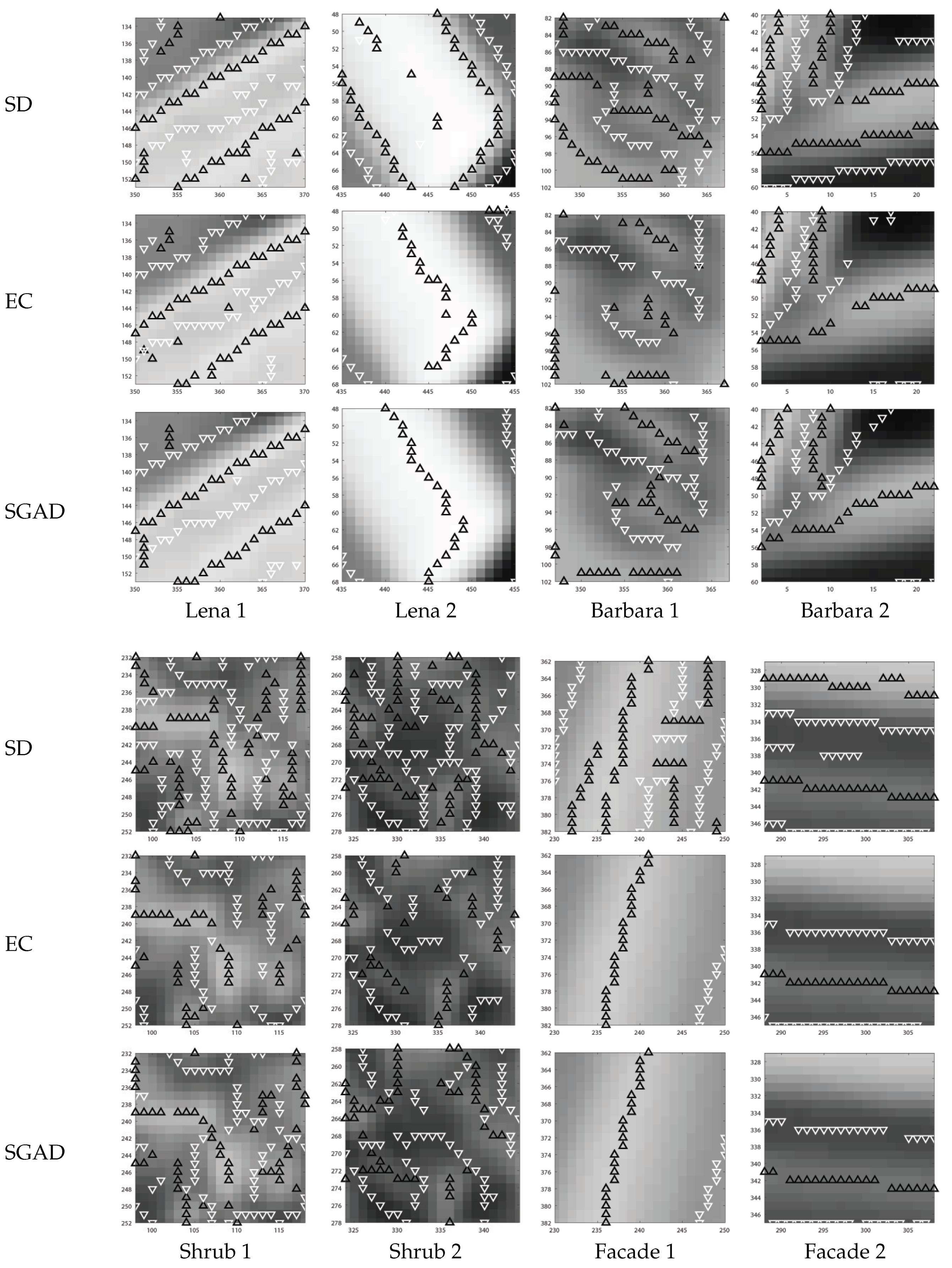
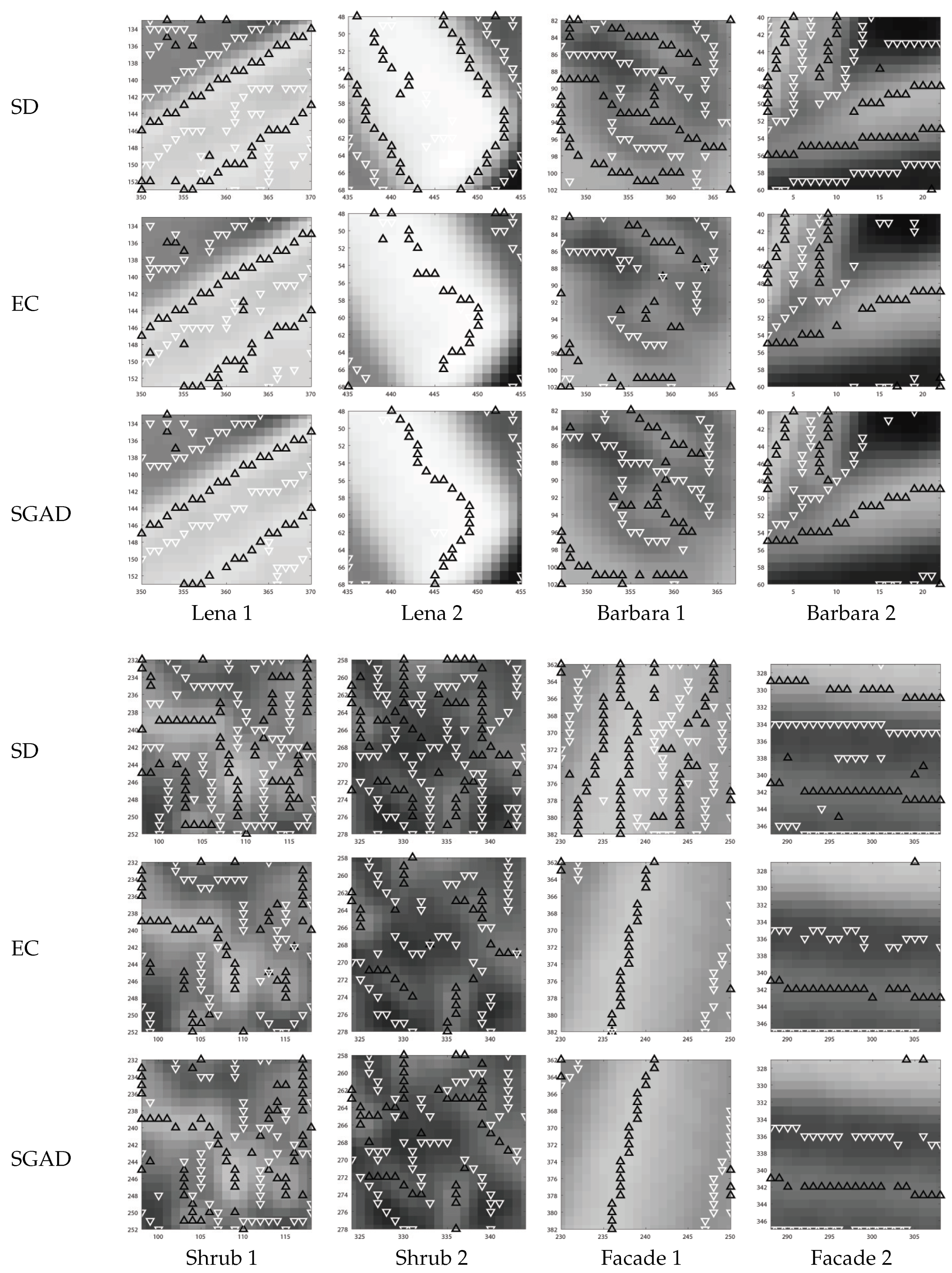
5. Line-Detection Experiments with Natural Images
6. Conclusions
Funding
Conflicts of Interest
References
- Haralick, R.M. Ridges and valleys on digital images. Comput. Vis. Graph. Image Process. 1983, 22, 28–38. [Google Scholar] [CrossRef]
- Gauch, J.M.; Pizer, S.M. Multiresolution analysis of ridges and valleys in grey-scale images. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 635–646. [Google Scholar] [CrossRef]
- Serrat, J.; Lopez, A.; Lloret, D. On ridges and valleys. In Proceedings of the 15th International Conference on Pattern Recognition, Barcelona, Spain, 3–7 September 2000. [Google Scholar]
- Rashe, C. Rapid contour detection for image classification. IET Image Process. 2018, 12, 532–538. [Google Scholar] [CrossRef]
- Roberts, L. Machine perception of three-dimensional solids. In Optical and Electro-Optical Information Processing; Tippet, J., Berkowitz, D., Clapp, L.C., Koester, C.J., Alexander Vanderburgh, J., Eds.; MIT Press: Cambridge, MA, USA, 1965; pp. 159–197. [Google Scholar]
- Pingle, K. Visual perception by computer. In Automatic Interpretation and Classification of Images; Grasselli, A., Ed.; Academic Press: New York, NY, USA, 1969; pp. 277–284. [Google Scholar]
- Prewitt, J. Object enhancement and extraction. In Picture Processing and Psychophysics; Rosenfeld, A., Lipkin, B., Eds.; Academic Press: New York, NY, USA, 1970; pp. 75–149. [Google Scholar]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. R. Soc. Lond. 1980, 207, 187–217. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Jung, C.; Kelber, C. Lane following and lane departure using a linear-parabolic model. Image Vis. Comput. 2005, 23, 1192–1202. [Google Scholar] [CrossRef]
- An, X.; Shang, E.; Song, J.; Li, J.; He, H. Real-time lane departure warning system based on a single fpga. EURASIP J. Image Video Process. 2013, 38, 1–18. [Google Scholar] [CrossRef]
- Wu, P.; Chang, C.; Lin, C. Lane mark extraction for automobiles under complex conditions. Pattern Recognit. 2014, 47, 2756–2767. [Google Scholar] [CrossRef]
- Son, J.; Yoo, H.; Kim, S.; Sohn, K. Real-time illumination invariant lane detection for lane departure warning system. Expert Syst. Appl. 2015, 42, 1816–1824. [Google Scholar] [CrossRef]
- Karasulu, B. Automatic extraction of retinal blood vessels: A software implementation. Eur. Sci. J. 2012, 8, 47–57. [Google Scholar]
- Majumdar, J.; Kundu, D.; Tewary, S.; Ghosh, S.; Chakraborty, S.; Gupta, S. An automated graphical user interface based system for the extraction of retinal blood vessels using Kirsch’s template. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 86–93. [Google Scholar] [CrossRef]
- Wang, W.; Yang, N.; Zhang, Y.; Wang, F.; Cao, T.; Eklund, P. A review of road extraction from remote sensing images. J. Traffic Transp. Eng. 2016, 3, 271–282. [Google Scholar] [CrossRef]
- Lindeberg, T. Edge detection and ridge detection with automatic scale selection. Int. J. Comput. Vis. 1998, 30, 117–154. [Google Scholar] [CrossRef]
- Steger, C. An unbiased detector of curvilinear structures. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 113–125. [Google Scholar] [CrossRef]
- Paton, K. Picture description using Legendre polynomials. Comput. Graph. Image Process. 1975, 4, 40–54. [Google Scholar] [CrossRef]
- Ghosal, S.; Mehrotra, R. Detection of comosite edges. IEEE Trans. Image Process. 1994, 3, 14–25. [Google Scholar] [CrossRef]
- Laptev, I.; Mayer, H.; Lindeberg, T.; Eckstein, W.; Steger, C.; Baumgartner, A. Automatic extraction of roads from aerial images based on scale space and snakes. Mach. Vis. Appl. 2000, 12, 23–31. [Google Scholar] [CrossRef]
- Jeon, B.K.; Jang, J.H.; Hong, K.S. Road detection in spaceborne SAR images using a genetic algorithm. IEEE Trans. Geosci. Remote. Sens. 2002, 40, 22–29. [Google Scholar] [CrossRef]
- Lopez-Molina, C.; de Ulzurrun, G.V.D.; Baetens, J.; den Bulcke, J.V.; Baets, B.D. Unsupervised ridge detection using second order anisotropic Gaussian kernels. Signal Process. 2015, 116, 55–67. [Google Scholar] [CrossRef]
- Cornelis, B.; Ruzic, T.; Gezels, E.; Doomes, A.; Pizurica, A.; Platisa, L.; Cornelis, J.; Martens, M.; Mey, M.D.; Daubechies, I. Crack detection and impainting for virtual restoration of paintings: The case of the Ghent Altarpiece. Signal Process. 2013, 93, 605–619. [Google Scholar] [CrossRef]
- Lopez, A.M.; Lumbreras, F.; Serrat, J.; Villanueva, J.J. Evaluation of methods for ridge and valley detection. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 327–335. [Google Scholar] [CrossRef]
- Zwiggelaar, R.; Astely, S.M.; Boggis, C.R.M.; Taylor, C.J. Linear structures in mammographic images: Detection and classification. IEEE Trans. Med Imaging 2004, 23, 1077–1086. [Google Scholar] [CrossRef] [PubMed]
- Lagendijk, R.L.; Tekalp, A.M.; Biemond, J. Maximum likelihood image and blur identification: A unifying approach. Opt. Eng. 1990, 29, 422–435. [Google Scholar]
- Reeves, S.J.; Mersereau, R.M. Blur identification by the method of generalized cross-validation. IEEE Trans. Image Process. 1992, 1, 301–311. [Google Scholar] [CrossRef] [PubMed]
- Savakis, A.E.; Trussell, H.J. Blur identification by residual spectral matching. IEEE Trans. Image Process. 1993, 2, 141–151. [Google Scholar] [CrossRef]
- Kundur, D.; Hatzinakos, D. Blind image deconvolution. IEEE Signal Process. Mag. 1996, 13, 43–64. [Google Scholar] [CrossRef]
- Yitzhaky, Y.; Kopeika, N.S. Identification of blur parameters from motion blurred images. Graph. Model. Image Process. 1997, 59, 310–320. [Google Scholar] [CrossRef]
- Chen, L.; Yap, K.H. Efficient discrete spatial techniques for blur support identification in blind image deconvolution. IEEE Trans. Signal Process. 2006, 54, 1557–1562. [Google Scholar] [CrossRef]
- Wu, S.; Lin, W.; Xie, S.; Lu, Z.; Ong, E.P.; Yao, S. Blind blur assessment for vision-based applications. J. Vis. Commun. Image Represent. 2009, 20, 231–241. [Google Scholar] [CrossRef]
- Hu, W.; Xue, J.; Zheng, N. PSF estimation via gradient domain correlation. IEEE Trans. Image Process. 2012, 21, 386–392. [Google Scholar] [CrossRef]
- Liu, S.; Wang, H.; Wang, J.; Cho, S.; Pan, C. Automatic blur-kernel-size estimation for motion deblurring. Vis. Comput. 2015, 31, 733–746. [Google Scholar] [CrossRef]
- Seo, S. Edge modeling by two blur parameters in varying contrasts. IEEE Trans. Image Process. 2018, 27, 2701–2714. [Google Scholar] [CrossRef] [PubMed]
- Bromiley, P.A. Products and Convolutions of Gaussian Probability Density Functions; TINA: Manchester, UK, 2018. [Google Scholar]
- Versaci, M.; Morabito, F.C.; Angiulli, G. Adaptive image contrast enhancement by computing distances into a 4-Dimensional fuzzy unit hypercube. IEEE Access 2017, 5, 26922–26931. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SD | EC | SGAD | |
|---|---|---|---|
| 0.50 | 31.7 | 10.2 | 21.0 |
| 0.75 | 30.5 | 9.5 | 19.5 |
| 1.00 | 31.8 | 9.3 | 18.6 |
| 1.25 | 30.9 | 9.0 | 18.2 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, S. Line-Detection Based on the Sum of Gradient Angle Differences. Appl. Sci. 2020, 10, 254. https://doi.org/10.3390/app10010254
Seo S. Line-Detection Based on the Sum of Gradient Angle Differences. Applied Sciences. 2020; 10(1):254. https://doi.org/10.3390/app10010254
Chicago/Turabian StyleSeo, Suyoung. 2020. "Line-Detection Based on the Sum of Gradient Angle Differences" Applied Sciences 10, no. 1: 254. https://doi.org/10.3390/app10010254
APA StyleSeo, S. (2020). Line-Detection Based on the Sum of Gradient Angle Differences. Applied Sciences, 10(1), 254. https://doi.org/10.3390/app10010254