Bionic Morse Coding Mimicking Humpback Whale Song for Covert Underwater Communication




Abstract
1. Introduction
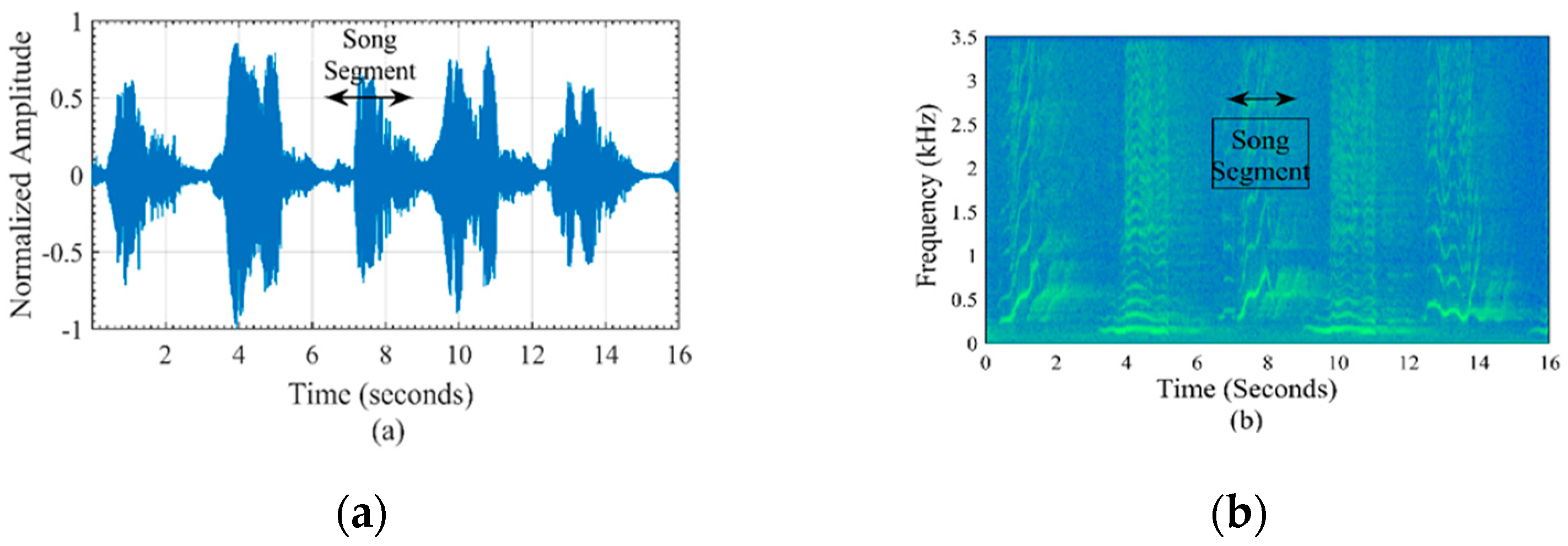
2. Characteristics of Humpback Whale Songs
3. Cetacean Morse Codes
4. Bionic Morse Coding Method
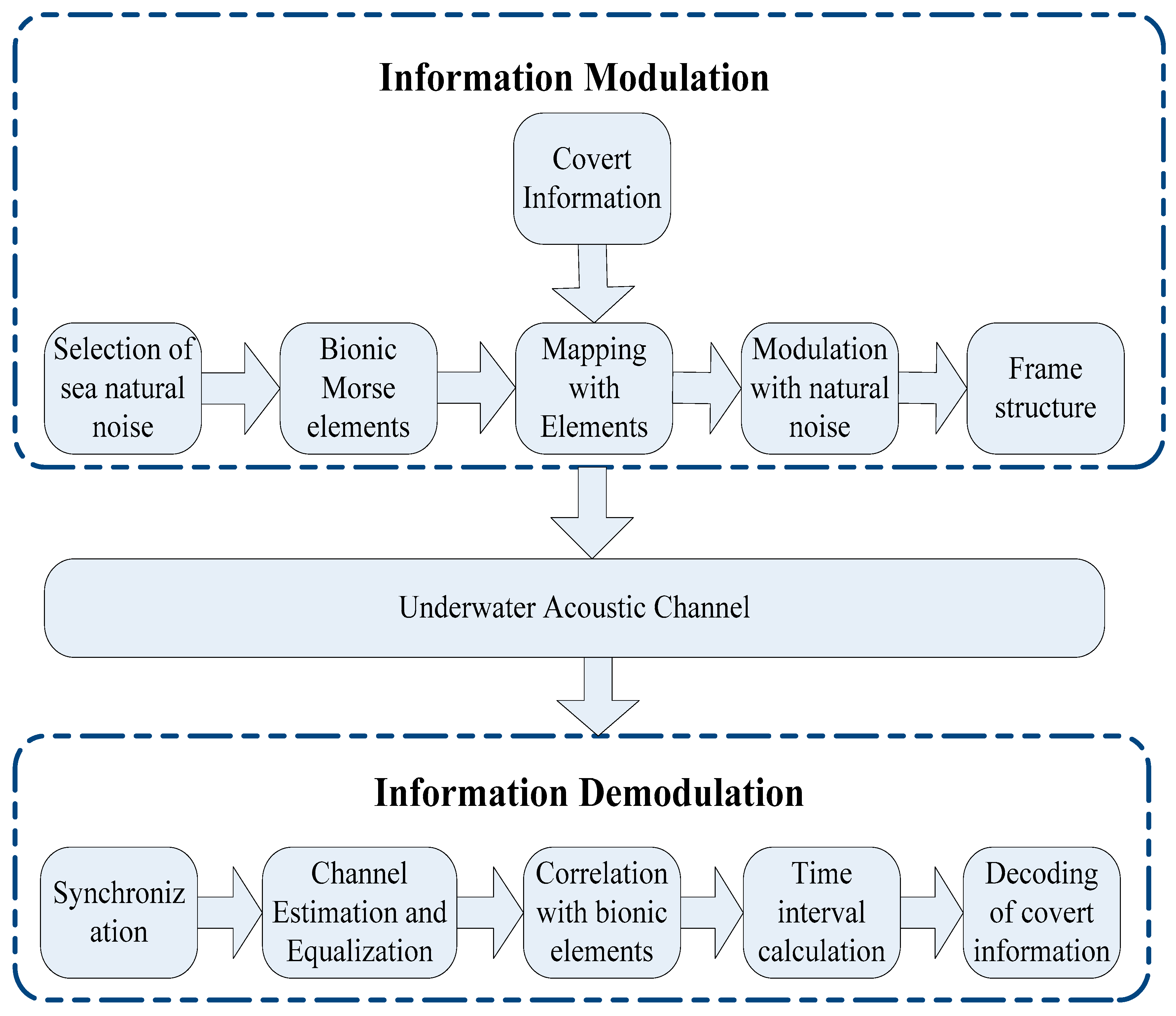
4.1. Information Modulation
4.1.1. Step 1: Selection of Carrier
4.1.2. Step 2: Synchronization and Bionic Morse Elements Waveforms
4.1.3. Step 3: Mapping of Covert Information to Bionic Morse Elements
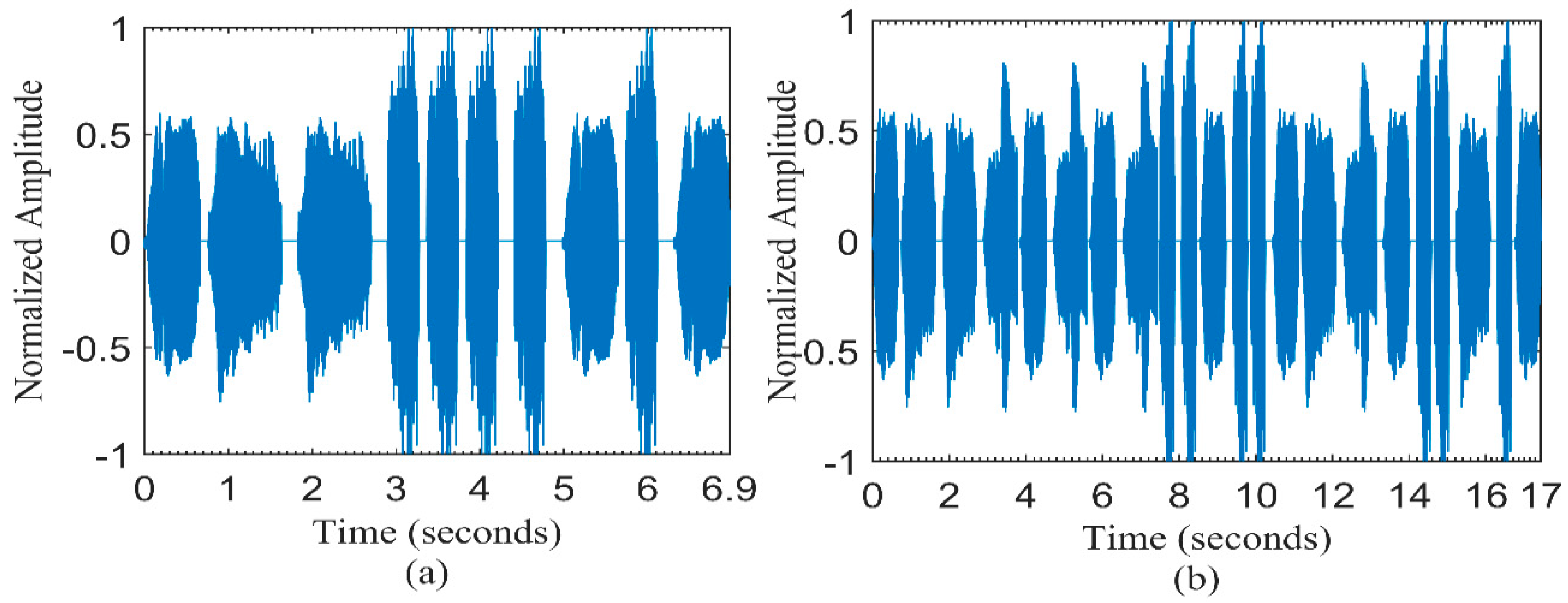
4.1.4. Step 4: Modulation of Covert Information to Mimicked Message
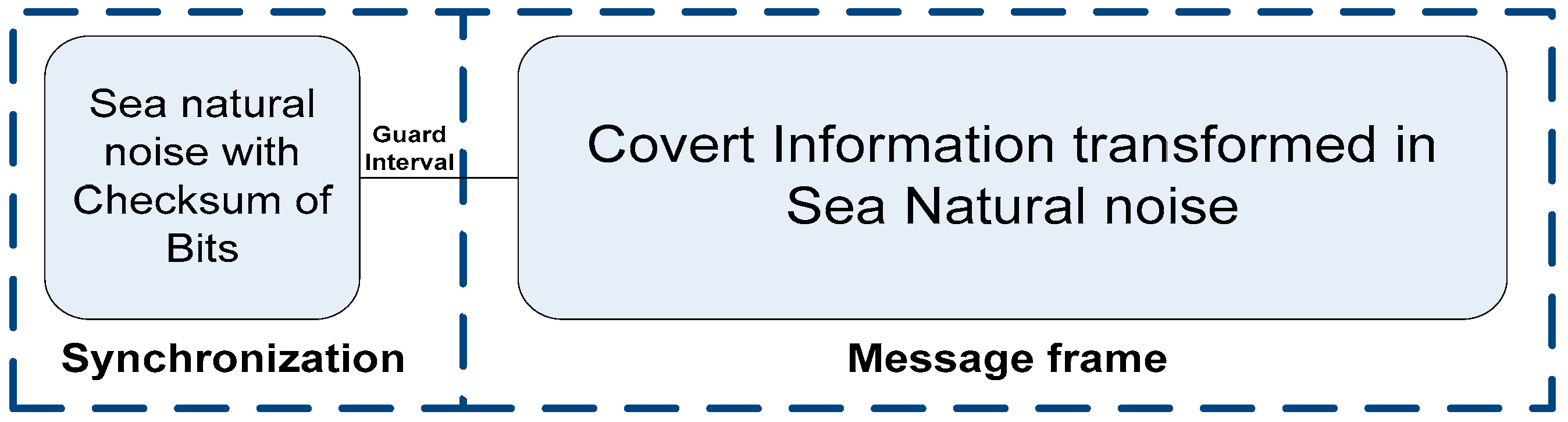
4.1.5. Step 5: Frame Structure
4.2. Information Modulation
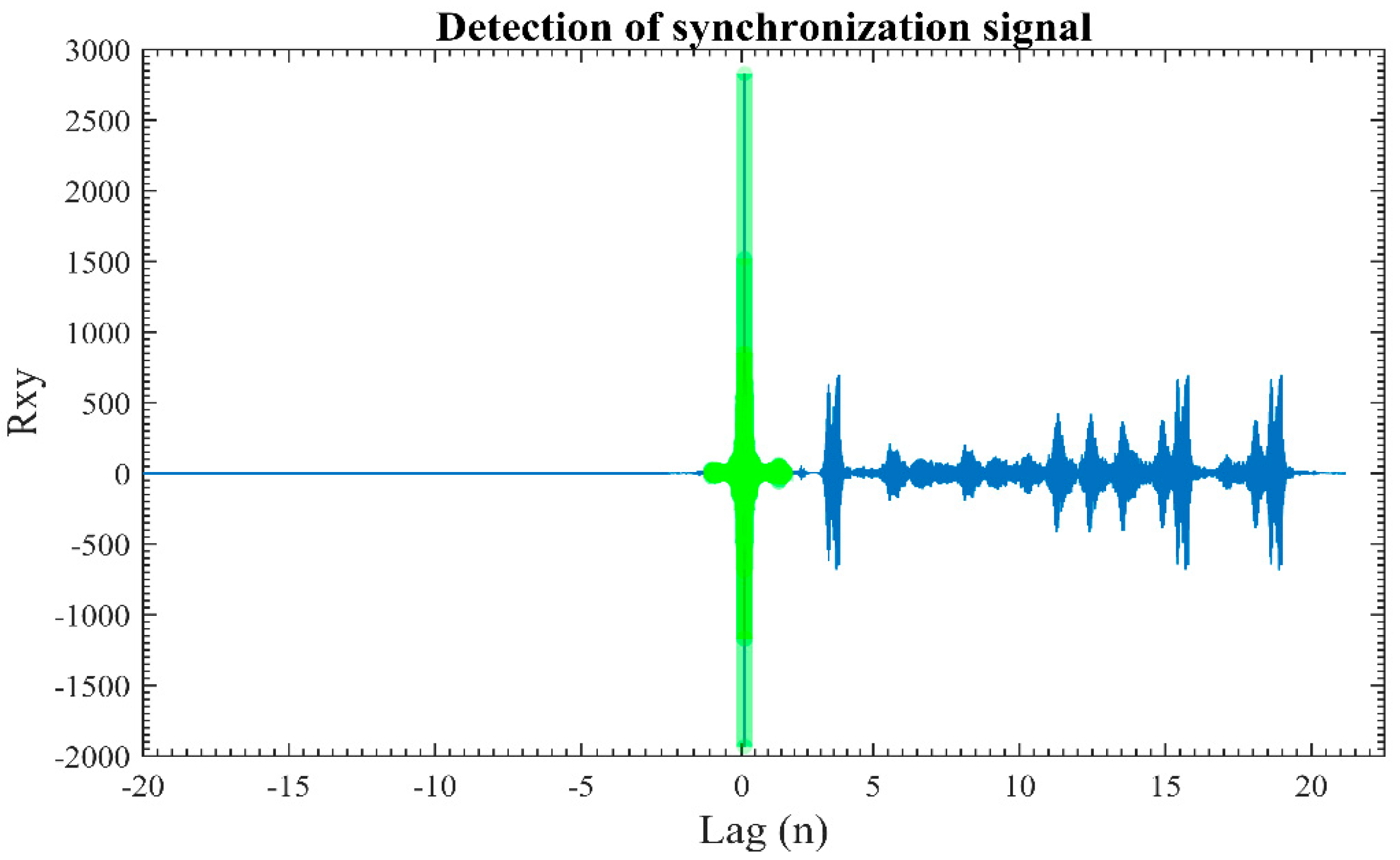
4.2.1. Step 1: Synchronization
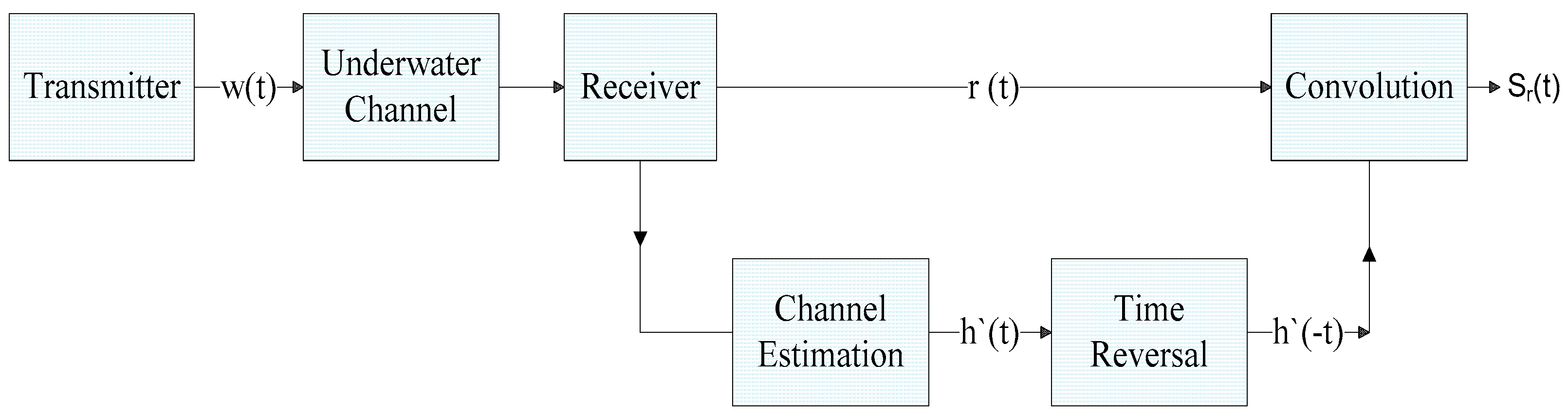
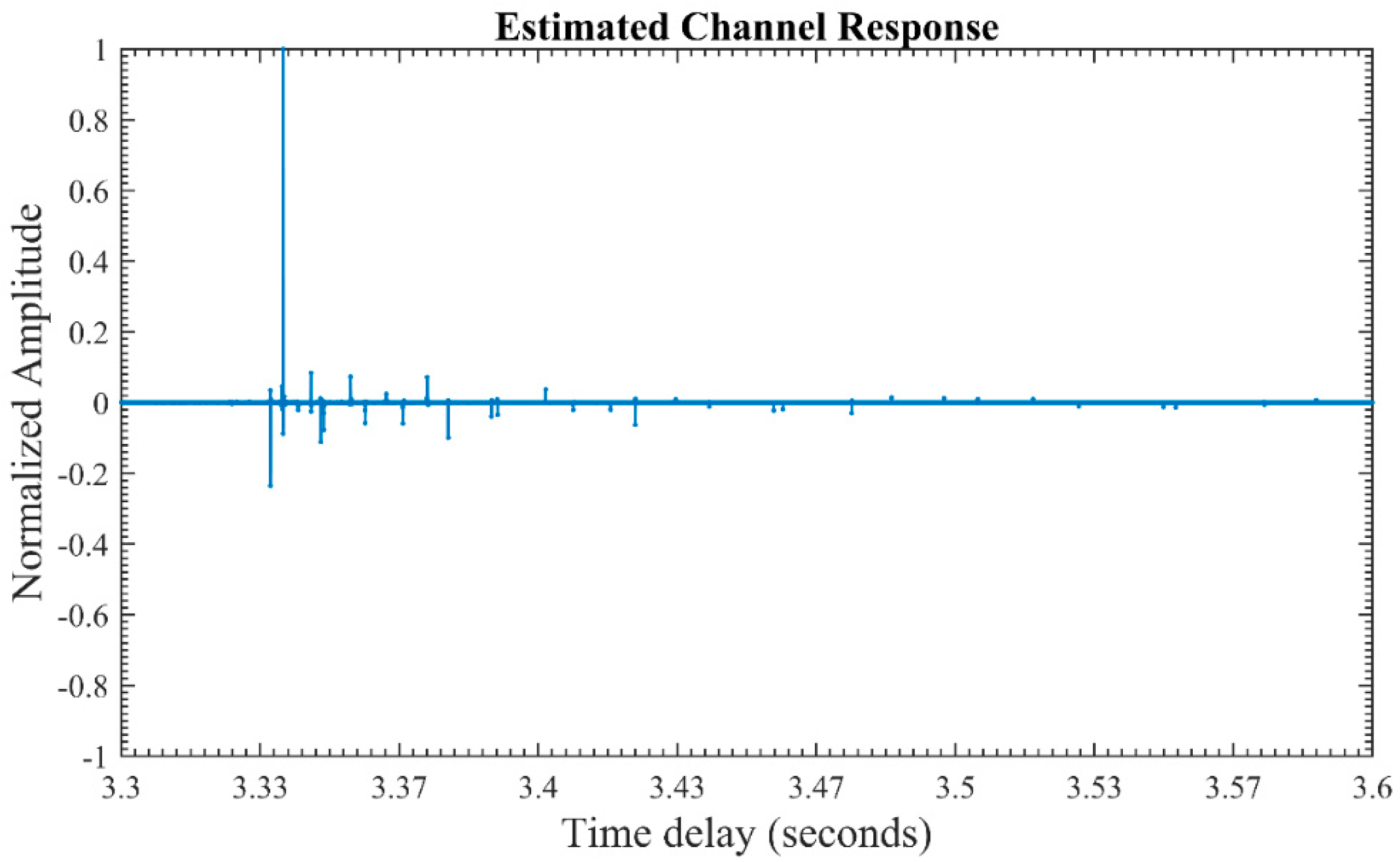
4.2.2. Step 2: Channel Estimation and Equalization
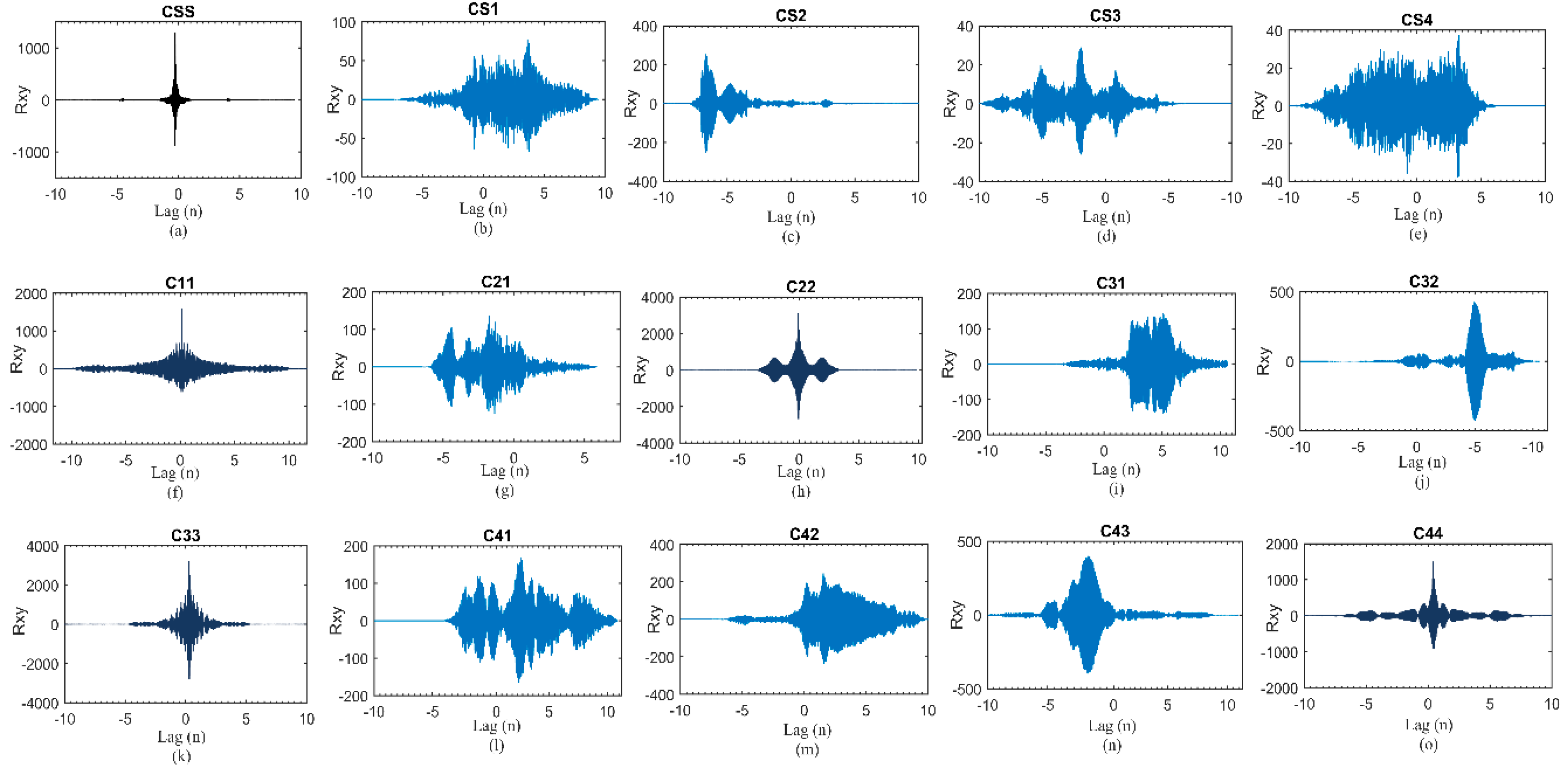
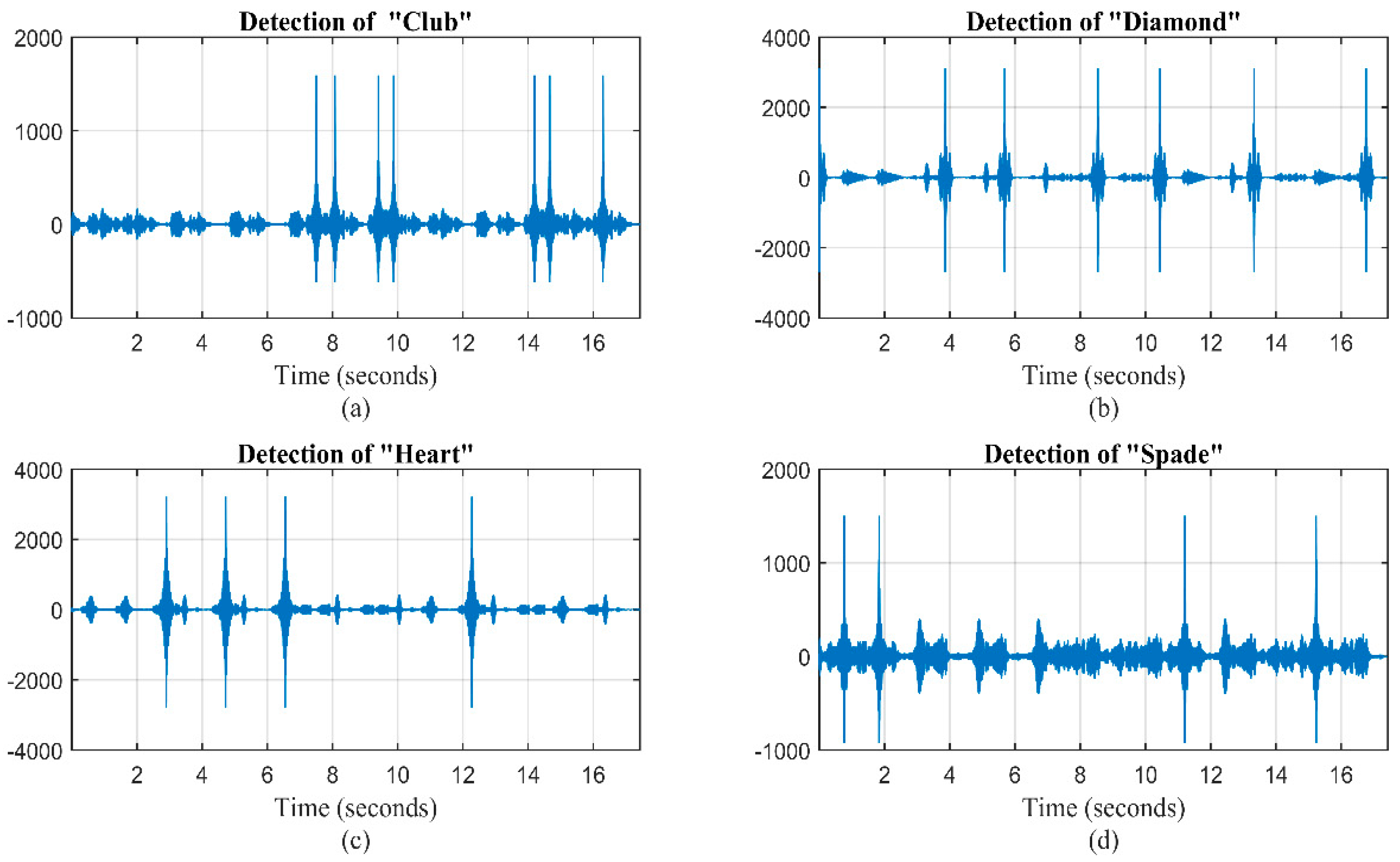
4.2.3. Step 3: Detection of Bionic Morse Elements
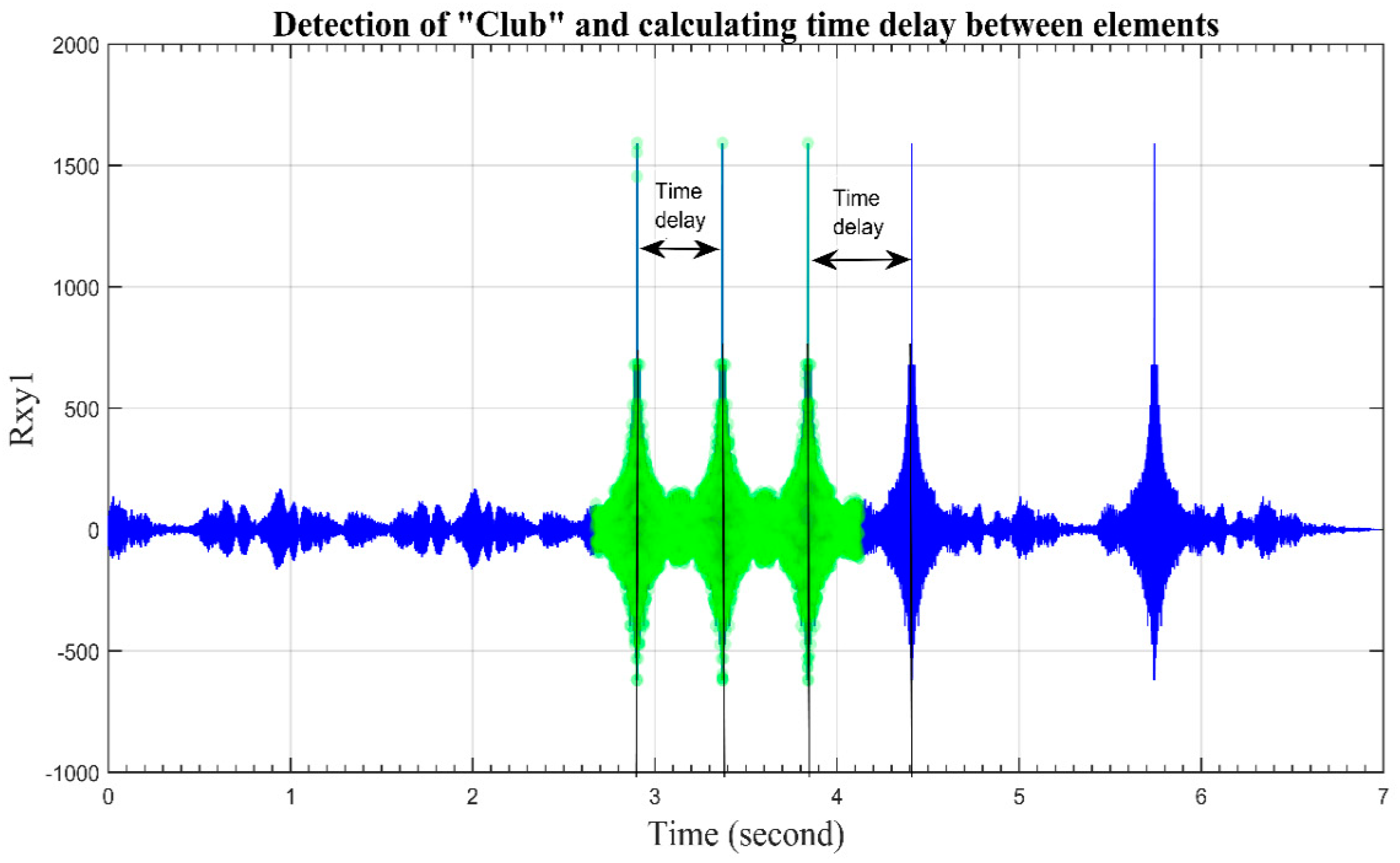
4.2.4. Step 4: Time Interval
4.2.5. Step 5: Mapping of Covert Information
5. Imperceptibility
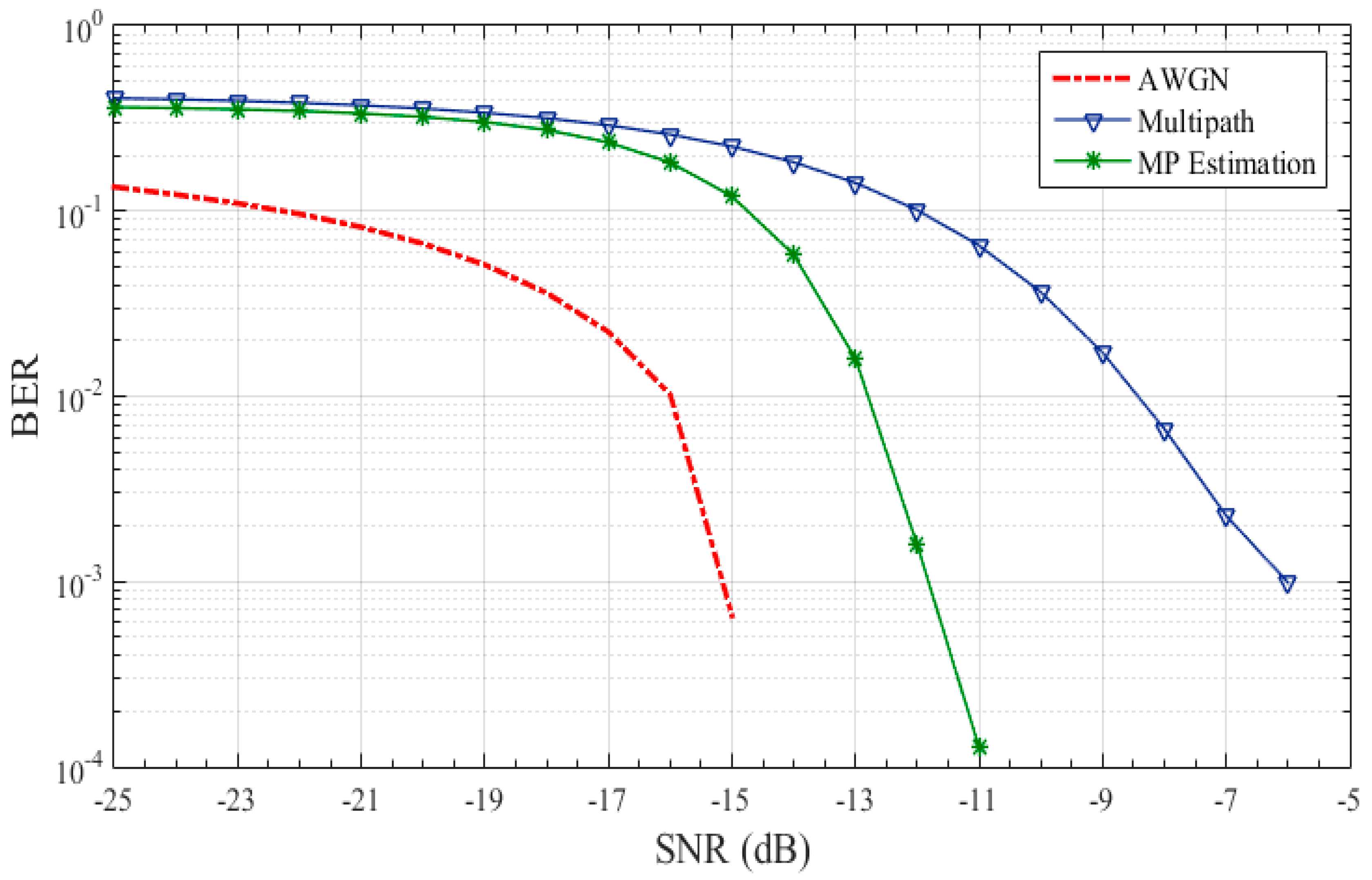
6. Simulation Experiment
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zuber, K.W.; Opieliński, K.J. Animal Mimicry in Covert Underwater Communication: Application of Syntax Generation and Simulated Genome Method. In Proceedings of the 2018 Joint Conference—Acoustics, Ustka, Poland, 11–14 September 2018; pp. 1–5. [Google Scholar]
- Diamant, R.; Lampe, L. Low Probability of Detection for Underwater Acoustic Communication: A Review. IEEE Access 2018, 6, 19099–19112. [Google Scholar] [CrossRef]
- Baek, C.-U.; Jung, J.-W.; Do, D.-W. Study on the Structure of an Efficient Receiver for Covert Underwater Communication Using Direct Sequence Spread Spectrum. Appl. Sci. 2018, 8, 58. [Google Scholar] [CrossRef]
- Qiao, G.; Bilal, M.; Liu, S.; Ma, T.; Zhao, Y.; Kong, B. Symmetry Oriented Covert Acoustic Communication by Mimicking Humpback Whale Song. Symmetry 2019, 11, 752. [Google Scholar] [CrossRef]
- Jans, W.; Nissen, I.; Gerdes, F.; Sangfelt, E.; Solberg, C.-E.; van Walree, P. UUV—Covert acoustic communication—Preminilary results of first sea experiment. In Proceedings of the Undersea Defence Technology Conference and Exhibition, Hamburg, Germany, 27–29 June 2006. [Google Scholar]
- Qiao, G.; Bilal, M.; Liu, S.; Babar, Z.; Ma, T. Biologically inspired covert underwater acoustic communication—A review. Phys. Commun. 2018, 30, 107–114. [Google Scholar] [CrossRef]
- Stojanovic, M.; Freitag, L. Recent Trends in Underwater Acoustic Communications. Mar. Technol. Soc. J. 2013, 47, 45–50. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, H.; Li, M.; Zhou, L.; Jin, J.; Zhang, J.; Lv, Z.; Ren, H.; Mao, J. Modelling and Simulation of Pseudo-Noise Sequence-Based Underwater Acoustic OSDM Communication System. Appl. Sci. 2019, 9, 2063. [Google Scholar] [CrossRef]
- Liu, S.; Qiao, G.; Ismail, A.; Liu, B.; Zhang, L. Covert underwater acoustic communication using whale noise masking on DSSS signal. In Proceedings of the OCEANS 2013 MTS/IEEE Bergen: The Challenges of the Northern Dimension, Bergen, Norway, 10–13 June 2013; IEEE Oceanic Engineering Society (IEEE/OES); Marine Technology Society (MTS): Washington, DC, USA, 2013. [Google Scholar]
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & networking. In Proceedings of the Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar]
- Wyler, A.R.; Ray, M.W. Aphasia for Morse code. Brain Lang. 1986, 27, 195–198. [Google Scholar] [CrossRef]
- Park, J.H. LPI Techniques in the Underwater Acoustic Channel. In Proceedings of the IEEE Military Communications Conference—Communications-Computers: Teamed for the 90’s, MILCOM 1986, Monterey, CA, USA, 5–9 October 1986; pp. 10.15.11–10.15.15. [Google Scholar]
- Yang, T.C.; Yang, W.-B. Performance analysis of direct-sequence spread-spectrum underwater acoustic communications with low signal-to-noise-ratio input signals. J. Acoust. Soc. Am. 2007, 123, 842–855. [Google Scholar] [CrossRef]
- Leus, G.; van Walree, P.A.; Boschma, J.; Fanciullacci, C.; Gerritsen, H.; Tusoni, P. Covert Underwater Communications with Multiband OFDM. In Proceedings of the Oceans 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 391–398. [Google Scholar]
- Diamant, R.; Lampe, L.; Gamroth, E. Bounds for Low Probability of Detection for Underwater Acoustic Communication. IEEE J. Ocean. Eng. 2017, 42, 143–155. [Google Scholar] [CrossRef]
- Yang, T.C.; Yang, W.-B. Low probability of detection underwater acoustic communication for mobile platforms. In Proceedings of the Oceans 2008 MTS/IEEE Conference, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Diamant, R.; Lampe, L.; Gamroth, E. Low probability of detection for underwater acoustic communication. In Proceedings of the 2014 Oceans—St. John’s, St. John’s, NL, Canada, 14–19 September 2014; pp. 1–6. [Google Scholar]
- Liu, S.; Qiao, G.; Ismail, A. Covert underwater acoustic communication using dolphin sounds. J. Acoust. Soc. Am. 2013, 133, EL300–EL306. [Google Scholar] [CrossRef]
- Dol, H.S.; Quesson, B.A.J.; Benders, F.P.A. Covert underwater communication with marine mammal sounds. In Proceedings of the UDT Europe 2008, Glasgow, UK, 10–12 June 2008; pp. 1–7. [Google Scholar]
- Liu, S.; Qiao, G.; Yu, Y.; Zhang, L.; Chen, T. Biologically inspired covert underwater acoustic communication using high frequency dolphin clicks. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; IEEE: New York, NY, USA, 2013. [Google Scholar]
- Liu, S.; Liu, B.; Yin, Y.; Qiao, G. M-ray covert underwater acoustic communication by mimicking dolphin sounds. J. Harbin Eng. Univ. 2014, 35, 119–125. [Google Scholar] [CrossRef]
- Han, X.; Yin, J.; Du, P.; Zhang, X. Experimental demonstration of underwater acoustic communication using bionic signals. Appl. Acoust. 2014, 78, 7–10. [Google Scholar] [CrossRef]
- ElMoslimany, A.; Zhou, M.; Duman, T.M.; Papandreou-Suppappola, A. A new signaling scheme for Underwater Acoustic communications. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 23–27 September 2013; pp. 1–5. [Google Scholar]
- Jia, Y.; Liu, G.; Zhang, L. Bionic camouflage underwater acoustic communication based on sea lion sounds. In Proceedings of the 2015 International Conference on Control, Automation and Information Sciences (ICCAIS), Changshu, China, 29–31 October 2015; pp. 332–336. [Google Scholar]
- Liu, S.; Wang, M.; Ma, T.; Qiao, G.; Bilal, M. Covert underwater communication by camouflaging sea piling sounds. Appl. Acoust. 2018, 142, 29–35. [Google Scholar] [CrossRef]
- Qiao, G.; Zhao, Y.; Liu, S.; Bilal, M. Dolphin Sounds-Inspired Covert Underwater Acoustic Communication and Micro-Modem. Sensors 2017, 17, 2447. [Google Scholar] [CrossRef] [PubMed]
- Shinagawa, Y.; Kunii, T.L.; Kergosien, Y.L. Surface coding based on Morse theory. IEEE Comput. Graph. Appl. 1991, 11, 66–78. [Google Scholar] [CrossRef]
- Bahl, R.; Ura, T.; Sugimatsu, H.; Inoue, T.; Sakamaki, T.; Kojima, J.; Akamatsu, T.; Takahashi, H.; Behera, S.K.; Pattnaik, A.K.; et al. Acoustic Survey of Irrawaddy Dolphin Populations in Chilika Lagoon: First Test of a Compact High-Resolution Device. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2007; pp. 1–6. [Google Scholar]
- Zhang, L.; Wang, D.; Bao, C.; Wang, Y.; Xu, K. Large-Scale Whale-Call Classification by Transfer Learning on Multi-Scale Waveforms and Time-Frequency Features. Appl. Sci. 2019, 9, 1020. [Google Scholar] [CrossRef]
- Zimmer, W.M.X. Passive Acoustic Monitoring of Cetaceans; Cambridge University Press: Cambridge, UK, 2011; Volume 1. [Google Scholar]
- Payne, R.S.; McVay, S. Songs of Humpback Whales. Science 1971, 173, 585–597. [Google Scholar] [CrossRef]
- Mazhar, S.; Ura, T.; Bahl, R. Effect of Temporal Evolution of Songs on Cepstrum-based Voice Signature in Humpback Whales. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–8. [Google Scholar]
- Adam, O.; Cazau, D.; Gandilhon, N.; Fabre, B.; Laitman, J.T.; Reidenberg, J.S. New acoustic model for humpback whale sound production. Appl. Acoust. 2013, 74, 1182–1190. [Google Scholar] [CrossRef]
- Green, S.R.; Mercado, E.; Pack, A.A.; Herman, L.M. Recurring patterns in the songs of humpback whales (Megaptera novaeangliae). Behav. Process. 2011, 86, 284–294. [Google Scholar] [CrossRef]
- Mercado, E., III; Handel, S. Understanding the structure of humpback whale songs (L). J. Acoust. Soc. Am. 2012, 132, 2947–2950. [Google Scholar] [CrossRef]
- Ocean Acoustic Libary. Available online: http://oalib.hlsresearch.com/ (accessed on 15 October 2019).
- Jiang, J.; Zhou, Z.; Yin, E.; Yu, Y.; Liu, Y.; Hu, D. A novel Morse code-inspired method for multiclass motor imagery brain–computer interface (BCI) design. Comput. Biol. Med. 2015, 66, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Shah, A.; Saidin, A.Z.; Taha, I.F.; Zeki, A.M.; Bhatti, Z. Similarities and Dissimilarities between Character Frequencies of Written Text of Melayu, English, and Indonesian Languages. In Proceedings of the 2013 International Conference on Advanced Computer Science Applications and Technologies, Kuching, Malaysia, 23–24 December 2013; pp. 192–194. [Google Scholar]
- Yin, J.; Yang, G.; Huang, D.; Jin, L.; Guo, Q. Blind adaptive multi-user detection for under-ice acoustic communications with mobile interfering users. J. Acoust. Soc. Am. 2017, 141, EL70–EL75. [Google Scholar] [CrossRef] [PubMed]
- Cotter, S.F.; Rao, B.D. Sparse channel estimation via matching pursuit with application to equalization. IEEE Trans. Commun. 2002, 50, 374–377. [Google Scholar] [CrossRef]
- Saadi, S.; Merrad, A.; Benziane, A. Novel secured scheme for blind audio/speech norm-space watermarking by Arnold algorithm. Signal Process. 2019, 154, 74–86. [Google Scholar] [CrossRef]
- Hua, G.; Huang, J.; Shi, Y.Q.; Goh, J.; Thing, V.L.L. Twenty years of digital audio watermarking—A comprehensive review. Signal Process. 2016, 128, 222–242. [Google Scholar] [CrossRef]
- Smith, J.N.; Goldizen, A.W.; Dunlop, R.A.; Noad, M.J. Songs of male humpback whales, Megaptera novaeangliae, are involved in intersexual interactions. Anim. Behav. 2008, 76, 467–477. [Google Scholar] [CrossRef]
- NOAA. World Ocean Atlas. Available online: http://staff.washington.edu/dushaw/WOA/ (accessed on 15 October 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Character | Freq. | Morse Code | Bionic Morse Code | Character | Freq. | Morse Code | Bionic Morse Code |
|---|---|---|---|---|---|---|---|
| A | 8.17% | N | 6.75% | ||||
| B | 1.49% | O | 7.51% | ||||
| C | 2.78% | P | 1.93% | ||||
| D | 4.25% | Q | 0.10% | ||||
| E | 12.70% | R | 5.99% | ||||
| F | 2.23% | S | 6.33% | ||||
| G | 2.02% | T | 9.06% | ||||
| H | 6.09% | U | 2.76% | ||||
| I | 6.97% | V | 0.98% | ||||
| J | 0.15% | W | 2.36% | ||||
| K | 0.77% | X | 0.15% | ||||
| L | 4.03% | Y | 1.97% | ||||
| M | 2.41% | Z | 0.07% |
| Morse Codes | Bionic Morse Codes |
|---|---|
| Contains two elements dot and dash | Contains four elements club , diamond , heart and spade |
| Longer sequences. | Shorter sequence. |
| Fixed duration of elements. | Durations depends of carrier. |
| Covert communication possible but chances of being decrypted. | Covert communication possible no chances of being decryption. |
| LPI constraint communication. | Perfect LPR constraint communication. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bilal, M.; Liu, S.; Qiao, G.; Wan, L.; Tao, Y. Bionic Morse Coding Mimicking Humpback Whale Song for Covert Underwater Communication. Appl. Sci. 2020, 10, 186. https://doi.org/10.3390/app10010186
Bilal M, Liu S, Qiao G, Wan L, Tao Y. Bionic Morse Coding Mimicking Humpback Whale Song for Covert Underwater Communication. Applied Sciences. 2020; 10(1):186. https://doi.org/10.3390/app10010186
Chicago/Turabian StyleBilal, Muhammad, Songzuo Liu, Gang Qiao, Lei Wan, and Yan Tao. 2020. "Bionic Morse Coding Mimicking Humpback Whale Song for Covert Underwater Communication" Applied Sciences 10, no. 1: 186. https://doi.org/10.3390/app10010186
APA StyleBilal, M., Liu, S., Qiao, G., Wan, L., & Tao, Y. (2020). Bionic Morse Coding Mimicking Humpback Whale Song for Covert Underwater Communication. Applied Sciences, 10(1), 186. https://doi.org/10.3390/app10010186