The Concept of Geodetic Analyses of the Measurement Results Obtained by Hydrostatic Leveling


Abstract
:1. Introduction
- Density variation of the fluid filling the sensor connecting pipe which is a function of temperature and pressure , . It is difficult or even impossible to assess precisely the density variations;
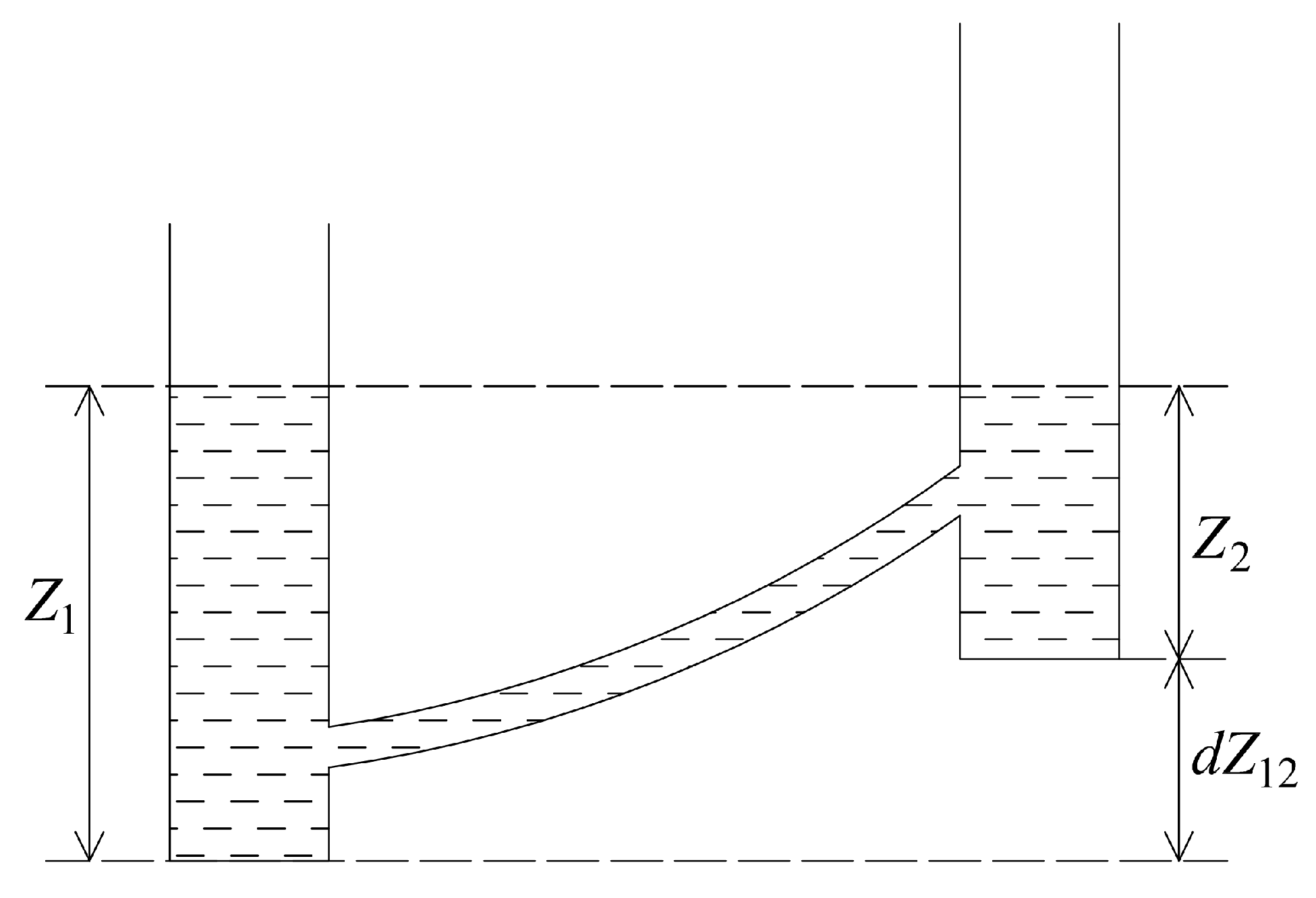
- Errors in determining the exact fluid column height in sensors;
- The changes of atmospheric pressure;
- Standard acceleration due to gravity changes;
- A tidal phenomenon (low and high tides).
2. Materials and Methods
- —vector of displacements at epoch k,
- —velocity vector at epoch k,
- —acceleration vector at epoch k,
- subscript —values denotes the prediction results,
- —time interval between epochs k and k+1 (), and
- , , —vectors of random disturbances, due to displacements, velocity, and acceleration at epoch k, respectively.
3. Results
3.1. Concept I
3.2. Concept II
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Becker, J.M. Levelling over the Öresund Bridge at the Millimeter Level. In Proceedings of the FIG XXII International Congress, Washington, DC, USA, 19–26 April 2002. [Google Scholar]
- Hong-Nan, L.; Dong-Sheng, L.; Liang, R.; Ting-Hua, Y.; Zi-Guang, J.; Kun-Peng, L. Structural health monitoring of innovative civil engineering structures in Mainland China. Struct. Monit. Maint. 2016, 3, 1–31. [Google Scholar]
- Miśkiewicz, M.; Meronk, B.; Brzozowski, T.; Wilde, K. Monitoring system of the road embankment. Balt. J. Road Bridge Eng. 2017, 12, 218–224. [Google Scholar] [CrossRef]
- Zhi Zheng, Y. Application of hydrostatic leveling system in metro monitoring for construction deep excavation above shield tunnel. Appl. Mech. Mater. 2013, 333–335, 1509–1513. [Google Scholar]
- Wei, F.Q.; Rivkin, L.; Wrulich, A. Experiences with the hydrostatic levelling system at the SLS. In Proceedings of the EPAC 2004, Lucerne, Switzerland, 5–9 July 2004; pp. 1651–1653. [Google Scholar]
- Morishita, T.; Ikegami, M. The slow-ground-motion monitoring based on the hydrostatic leveling system in J-PARC linac. Nucl. Instrum. Methods Phys. Res. A 2009, 602, 364–371. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Y.; Zhang, L.; Qiu, G.; Wei, D. Power transmission tower monitoring with hydrostatic leveling system: measurement refinement and performance evaluation. J. Sens. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Martin, D. The European Synchrotron Radiation Facility hydrostatic leveling system—twelve years experience with a large scale hydrostatic leveling system. In Proceedings of the 7th International Workshop on Accelerator Alignment, Hyogo, Japan, 11–14 November 2002; pp. 308–326. [Google Scholar]
- Boerez, J.; Hinderer, J.; Rivera, L.; Jones, M. Analysis and modeling of the effect of tides on the hydrostatic leveling system at CERN. Surv. Rev. 2012, 44, 256–264. [Google Scholar] [CrossRef]
- Wilde, K.; Meronk, B.; Groth, M.; Miśkiewicz, M. Monitoring konstrukcji z zastosowaniem niwelacji hydrostatycznej. In Proceedings of the XXVII Konferencja Naukowo-Techniczna: Awarie budowlane, Międzyzdroje, Poland, 20–23 May 2015; pp. 277–284. [Google Scholar]
- Bauman, R.P.; Schwaneberg, R. Interpretation of Bernoulli‘ Equation. Phys. Teach. 1994, 32, 478–488. [Google Scholar] [CrossRef]
- Filipiak-Kowszyk, D.; Kamiński, W. The application of Kalman filtering to predict vertical rail axis displacements of the overhead crane being a component of seaport transport structure. Pol. Marit. Res. 2016, 2, 64–70. [Google Scholar] [CrossRef]
- Gamse, S. Dynamic modelling of displacements on an embankment dam using the Kalman filter. J. Spat. Sci. 2018, 63, 3–21. [Google Scholar] [CrossRef]
- Jäger, R.; González, F. GNSS/LPS Based Online Control and Alarm System (GOCA) – Mathematical Models and Technical Realization of a System for Natural and Geotechnical Deformation Monitoring and Hazard Prevention. In Geodetic Deformation Monitoring: From Geophysical to Engineering Roles, Proceedings of IAG SYMPOSIA; Sanso, F., Gil, A.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 131, pp. 293–303. [Google Scholar]
- Yang, Y.; Gao, W. An optimal adaptive kalman filter. J. Geod. 2006, 80, 177–183. [Google Scholar] [CrossRef]
- Yalçinkaya, M.; Bayrak, T. Comparison of static, kinematic and dynamic geodetic deformation models for Kutlugün Landslide in Northeastern Turkey. Nat. Hazards 2005, 34, 91–110. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Sensor Name | Reading in [mm] | |
|---|---|---|
| Initial Epoch | Actual Epoch | |
| expansion tank/ reference sensor | 5.1 | 45.4 |
| sensor no. 1 | 66.8 | 101.4 |
| sensor no. 2 | 53.3 | 94.7 |
| sensor no. 3 | 48.0 | 90.0 |
| sensor no. 4 | 38.4 | 80.7 |
| sensor no. 5 | 43.4 | 85.4 |
| Initial Epoch [mm] | Actual Epoch [mm] | ||
|---|---|---|---|
| −61.7 | −56.0 | 5.7 | |
| −48.2 | −49.3 | −1.1 | |
| −42.9 | −44.6 | −1.7 | |
| −33.3 | −35.3 | −2.0 | |
| −38.3 | −40.0 | −1.7 |
| Initial Epoch [mm] | Actual Epoch [mm] | ||
|---|---|---|---|
| −61.7 | −56.0 | 5.7 | |
| 13.5 | 6.7 | −6.8 | |
| 5.3 | 4.7 | −0.6 | |
| 9.6 | 9.3 | −0.3 | |
| −5.0 | −4.7 | 0.3 |
| Initial Epoch [mm] | Epoch k+1 [mm] | ||
|---|---|---|---|
| −61.7 | −55.6 | 6.1 | |
| 13.5 | 6.0 | −7.5 | |
| 5.3 | 4.8 | −0.5 | |
| 9.6 | 9.4 | −0.2 | |
| −5.0 | −4.8 | 0.2 |
| Correction | Value [mm] | Correction | Value [mm] |
|---|---|---|---|
| 0.05 | −0.4 | ||
| −0.05 | 0.4 | ||
| −0.03 | 0.5 | ||
| −0.03 | 0.5 | ||
| 0.03 | 0.5 | ||
| −0.06 | −0.06 | ||
| 0.10 | 0.10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamiński, W.; Makowska, K. The Concept of Geodetic Analyses of the Measurement Results Obtained by Hydrostatic Leveling. Geosciences 2019, 9, 406. https://doi.org/10.3390/geosciences9100406
Kamiński W, Makowska K. The Concept of Geodetic Analyses of the Measurement Results Obtained by Hydrostatic Leveling. Geosciences. 2019; 9(10):406. https://doi.org/10.3390/geosciences9100406
Chicago/Turabian StyleKamiński, Waldemar, and Karolina Makowska. 2019. "The Concept of Geodetic Analyses of the Measurement Results Obtained by Hydrostatic Leveling" Geosciences 9, no. 10: 406. https://doi.org/10.3390/geosciences9100406
APA StyleKamiński, W., & Makowska, K. (2019). The Concept of Geodetic Analyses of the Measurement Results Obtained by Hydrostatic Leveling. Geosciences, 9(10), 406. https://doi.org/10.3390/geosciences9100406