Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys


Abstract
1. Introduction
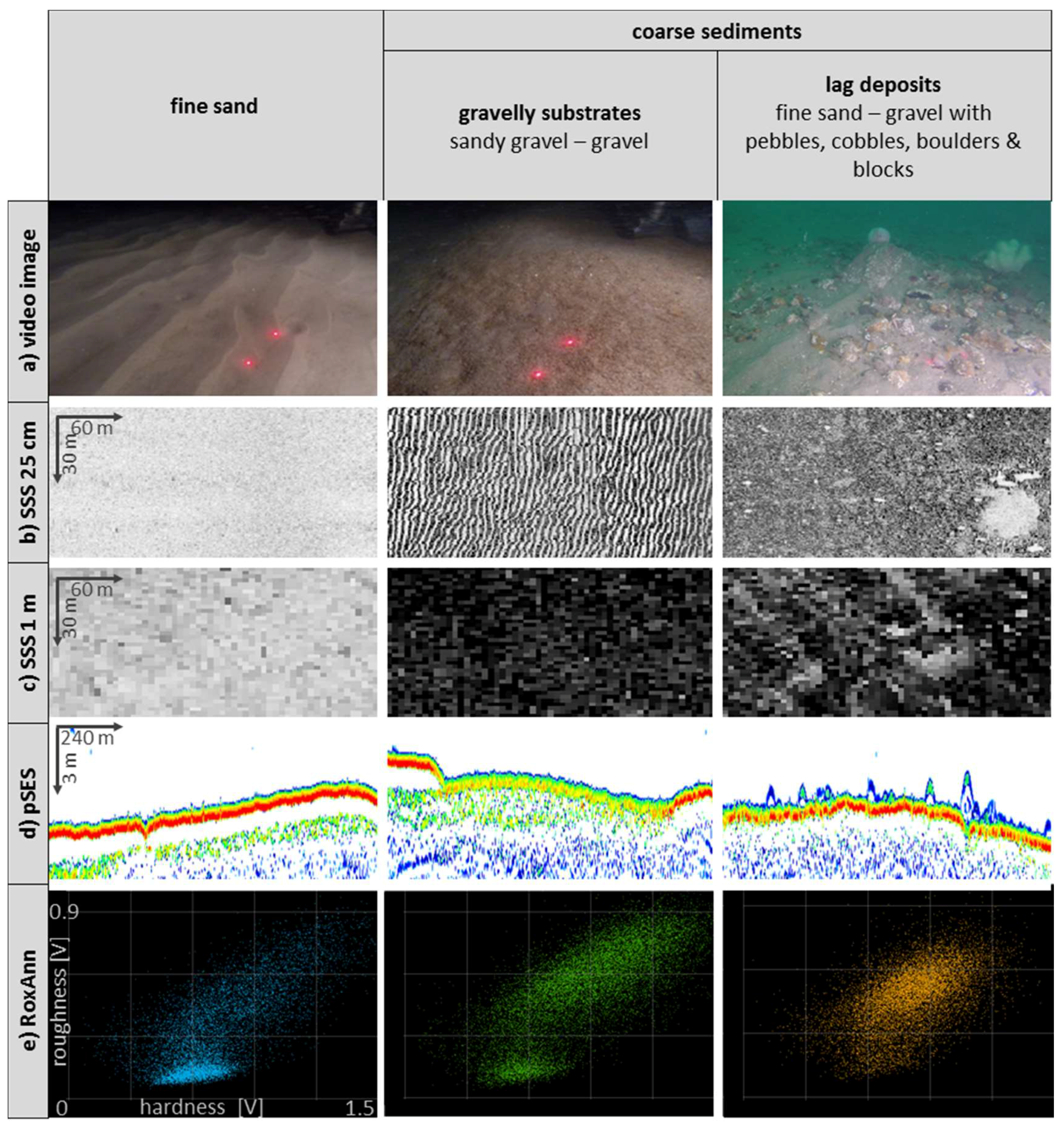
- differentiate zones of high SSS backscatter into:
- (a)
- rippled gravelly seafloor largely without stones
- (b)
- seafloor with exposed stones
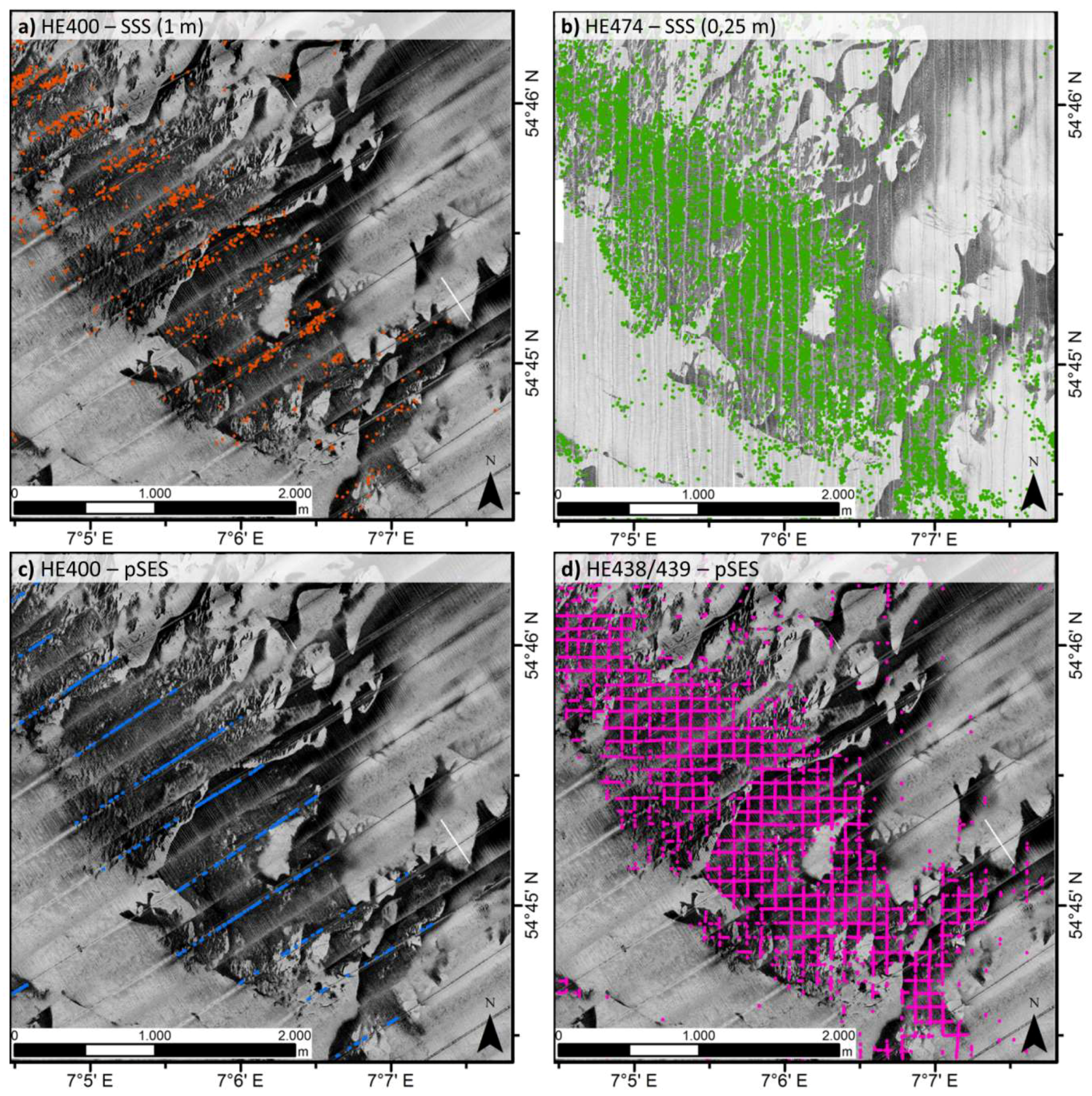
- identify stone-bearing areas for further high-resolution investigations
2. Materials and Methods
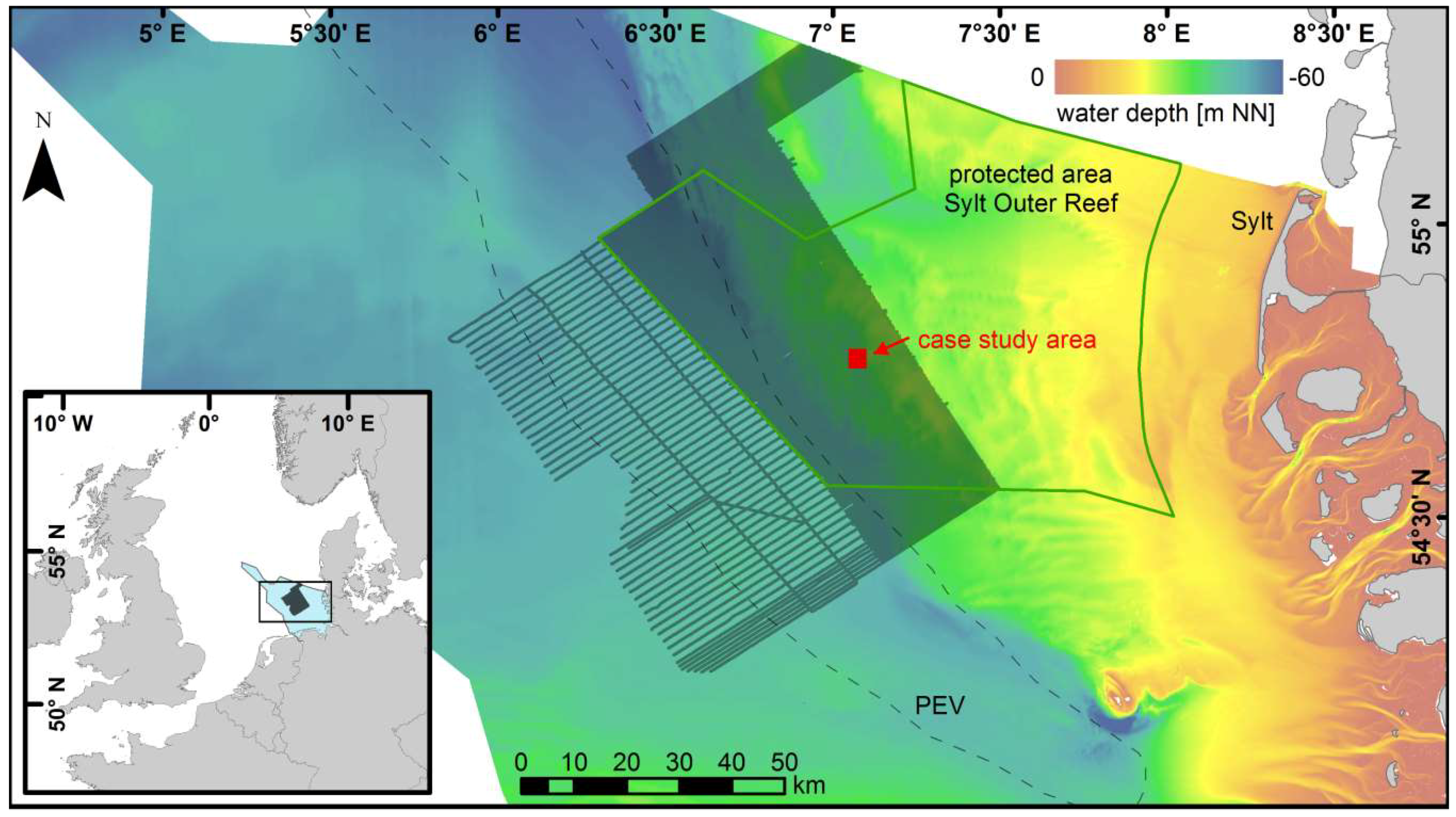
2.1. Regional Settings
2.2. Methods
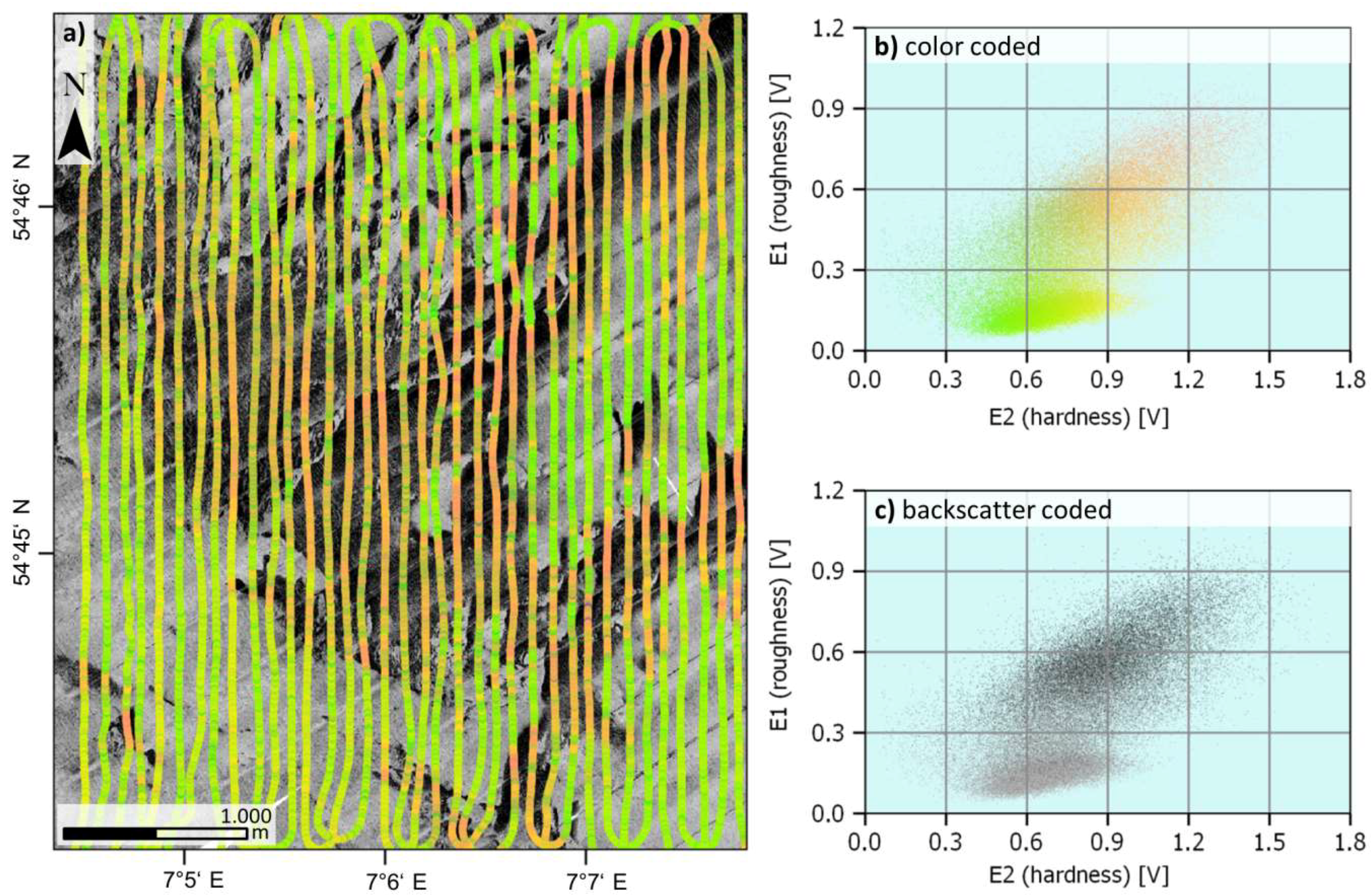
- Color coding: according to Hass et al. [16].
- Backscatter coding: AGDS data points are colored in the SSS backscatter gray value that occurred at the point location. This value was extracted from the high resolution SSS mosaic raster with the ArcGIS (Esri Inc., Redlands, CA, USA) spatial analyst tool “Extract values to Point”.
3. Results
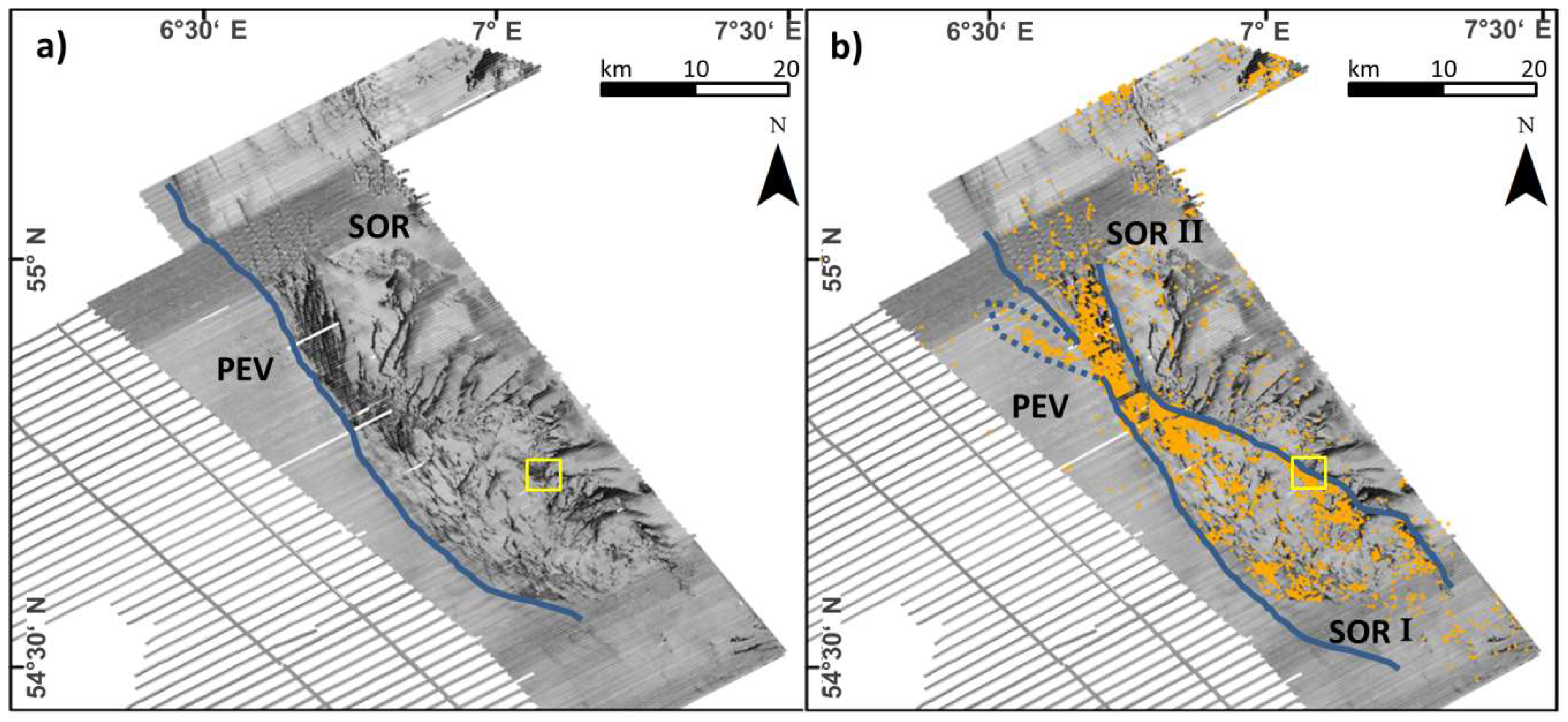
- the paleo Elbe valley (PEV)
- the Sylt Outer Reef (SOR)
- lag deposits: poorly sorted sediments with a matrix of fine sand to gravel with pebbles, cobbles, boulders and blocks up 1.5 m in size
- gravelly substrates: large ripples (up to 30 cm in height) of sandy gravel to gravel (described in more detail by Papenmeier et al. [34])
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sheehan, E.V.; Bridger, D.; Attrill, M.J. The ecosystem service value of living versus dead biogenic reef. Estuar. Coast. Shelf Sci. 2015, 154, 248–254. [Google Scholar] [CrossRef]
- Taylor, R.B. Density, biomass and productivity of animals in four subtidal rocky reef habitats: The importance of small mobile invertebrates. MEPS 1998, 172, 37–51. [Google Scholar] [CrossRef]
- European Commission. Council Directive 92/43/EEC of 21 May 1992 on the Conservation of Natural Habitats and of Wild Fauna and Flora (Habitat Directive). 1992. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A31992L0043 (accessed on 27 July 2018).
- Coolen, J.W.P.; Bos, O.G.; Glorisu, S.; Lengkeek, W.; Cuperus, J.; van der Weide, B.; Agüera, A. Reefs, sand and reef-like sand: A comparison of the benthic biodiversity of habitats in the Dutch Borkum Reef Grounds. J. Sea Res. 2015, 103, 84–92. [Google Scholar] [CrossRef]
- Von Nordheim, H.; Boedecker, D.; Krause, J.C. Progress in Marine Conservation in Europe; Springer: Berlin/Heidelberg, Germany, 2006; Chapter 6; p. 263. ISBN 978-3-540-33290-9. [Google Scholar]
- Figge, K. Sedimentverteilung in der Deutschen Bucht (Blatt-Nr. 2900, Maßstab 1:250 000); Deutsches Hydrographisches Institut: Hamburg, Germany, 1981. [Google Scholar]
- Laurer, W.-U.; Naumann, M.; Zeiler, M. Erstellung der Karte zur Sedimentverteilung auf dem Meeresboden in der deutschen Nordsee nach der Klassifikation von FIGGE (1981). Available online: https://www.gpdn.de/media/1449 (accessed on 26 July 2018).
- Schwarzer, K.; Diesing, M. Erforschung der FFH-Lebensraumtypen Sandbank und Riff in der AWZ der deutschen Nord- und Ostsee, Abschlussbericht für das FuE-Vorhaben FKZ 802 85 270 (Bundesamt für Naturschutz); Institut für Geowissenschaften, Christian-Albrechts-Universität zu Kiel: Kiel, Germany, 2006; p. 71. [Google Scholar]
- Rachor, E.; Nehmer, P. Erfassung und Bewertung ökologisch wertvoller Lebensräume in der Nordsee, Abschlussbericht für das FuE-Vorahben FKZ 899 85 310 (Bundesamt für Naturschutz); Alfred-Wegener Institut für Polar- und Meeresforschung: Bremerhaven, Germany, 2003; p. 175. [Google Scholar]
- Blondel, P. The Handbook of Sidescan Sonar; Springer Praxis Books—Geophysical Sciences; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; 316p, ISBN 978-3-540-42641-7. [Google Scholar]
- BSH. Guideline for Seafloor Mapping in German Marine Waters Using High-Resolution Sonars; No. 7201; BSH: Munich, Germany, 2016; p. 147. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer: London, UK, 2002; p. 680. ISBN 978-3-540-78480-7. [Google Scholar]
- Wille, P.C. Sound Images of the Ocean in Research and Monitoring; Springer: Berlin/Heidelberg, Germany, 2005; 471p, ISBN 978-3540241225. [Google Scholar]
- Blondel, P. Automatic mine detection by textural analysis of COTS sidescan sonar imagery. Int. J. Remote Sens. 2000, 21, 3115–3128. [Google Scholar] [CrossRef]
- Brisette, M.B.; Clarke, J.E. Side scan versus multibeam echosounder object detection: A comparative analysis. Int. Hydrogr. Rev. 1999, 76, 21–34. [Google Scholar]
- Hass, H.C.; Mielck, F.; Fiorentino, D.; Papenmeier, S. Seafloor monitoring west of Helgoland (German Bight, North Sea) using the acoustic ground discrimination system RoxAnn. Geo-Mar. Lett. 2016, 37, 125–136. [Google Scholar] [CrossRef]
- Mielck, F.; Bartsch, I.; Hass, H.C.; Wölfl, A.C.; Bürk, D.; Betzler, C. Predicting spatial kelp abundance in shallow coastal waters using the acoustic ground discrimination system RoxAnn. Estuar. Coast. Shelf Sci. 2014, 143, 1–11. [Google Scholar] [CrossRef]
- Wölfl, A.C.; Lim, C.H.; Hass, H.C.; Lindhorst, S.; Tosonotto, G.; Lettmann, K.A.; Kuhn, G.; Wolff, J.O.; Abele, D. Distribution and characteristics of marine habitats in a subpolar bay based on hydroacoustics and bed shear stress estimates—Potter Cove, King George Island, Antarctica. Geo-Mar. Lett. 2014, 34, 435–446. [Google Scholar] [CrossRef]
- Wunderlich, J.; Müller, S.; Erdmann, S.; Hümbs, P.; Buch, T.; Endler, R. High-Resolution Acoustical Site Exploration in Very Shallow Water—A Case Study; EAGE Near Surface: Palermo, Italy, 2005; pp. 1–4. [Google Scholar]
- Wunderlich, J.; Wendt, G.; Müller, S. High-resolution echo-sounding and detection of embedded archaeological objects with nonlinear sub-bottom profilers. Mar. Geophys. Res. 2005, 26, 123–133. [Google Scholar] [CrossRef]
- Kozaczka, E.; Grelowska, G.; Kozaczka, S.; Szymczak, W. Detection of objects buried in the sea bottom with the use of parametric echosounder. Arch. Acoust. 2013, 38, 99–104. [Google Scholar] [CrossRef]
- Vasudevan, M.; Sivakholundu, K.M.; Venkata Rao, D.; Kathiroli, S. Application of Parametric Acoustics for Shallow-Water Near-Surface Geophysical Investigations. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, Singapore, 16–19 May 2007; pp. 1–4. [Google Scholar] [CrossRef]
- Ehlers, J.; Grube, A.; Stephan, H.-J.; Wansa, S. Pleistocene Glaciations of North Germany—New Results. In Developments in Quaternary Science; Ehlers, J., Gibbard, P.L., Hughes, P.D., Eds.; Elsevier: Amsterdam, The Netherlands, 2011; Volume 15, pp. 149–162. ISBN 978-0-444-53447-7. [Google Scholar]
- Streif, H. Sedimentary record of Pleistocene and Holocene marine inundations along the North Sea coast of Lower Saxony, Germany. Quat. Int. 2004, 112, 3–28. [Google Scholar] [CrossRef]
- Pratje, O. Die Deutung der Steingründe in der Nordsee als Endmoräne. Dtsch. Hydrogr. Z. 1951, 4, 106–114. [Google Scholar] [CrossRef]
- Woldstedt, P. Saalezeit, Warthestadium und Weichseleiszeit in Norddeutschland. E&G Quat. Sci. J. 1954, 4, 34–48. [Google Scholar]
- Behre, K.-E. A new Holocene sea-level curve for the southern North Sea. Boreas 2007, 36, 82–102. [Google Scholar] [CrossRef]
- Figge, K. Das Elbe-Urstromtal im Bereich der Deutschen Bucht (Nordsee). E&G Quat. Sci. J. 1980, 30, 203–211. [Google Scholar]
- Konradi, P.B. Biostratigraphy and environment of the Holocene marine transgression in the Heligoland Channel, North Sea. Bull. Geol. Soc. Den. 2000, 47, 71–79. [Google Scholar]
- Diesing, M.; Schwarzer, K. Identification of submarine hard-bottom substrates in the German North Sea and Baltic Sea EEZ with high-resolution acoustic seafloor imaging. In Progress in Marine Conservation in Europe, 1st ed.; Von Nordheim, H., Boedeker, D., Krause, J.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Chapter 6; pp. 111–112. ISBN 978-3-540-33290-9. [Google Scholar]
- Hass, H.C.; Kuhn, G.; Monien, P.; Brumsack, H.J.; Forwick, M. Climate fluctuations during the past two millennia as recorded in sediments from Maxwell Bay, South Shetland Islands, West Antarctica. Geol. Soc. Lond. Spec. Publ. 2010, 344, 243–260. [Google Scholar] [CrossRef]
- Folk, R.L. The distinction between grain size and mineral composition in sedimentary-rock nomenclature. J. Geol. 1954, 62, 344–359. [Google Scholar] [CrossRef]
- Penrose, J.D.; Siwabessy, P.J.W.; Gavrilov, A.; Parnum, I.; Hamilton, L.J.; Bickers, A.; Brooke, B.; Ryan, D.A.; Kennedy, P. Acoustic Techniques for Seabed Classification; Technical Report; CRC for Coastal Zone Estuary and Waterway Management: Queensland, Australia, 2005; Volume 32, pp. 1–130. [Google Scholar]
- Papenmeier, S.; Galvez, D.; Günther, C.-P.; Pesch, R.; Propp, C.; Hass, H.C.; Schuchardt, B.; Zeiler, M. Winnowed gravel lag deposits between sandbanks in the German North Sea. In Seafloor Geomorphology as Benthic Habitat, GeoHab Atlas of Seafloor Geomorphic Features and Benthic Habitats, 2nd ed.; Harris, P.T., Baker, E.K., Eds.; Elsevier: New York, NY, USA, in press.
- Holland, K.T.; Elmore, P.A. A review of heterogeneous sediments in coastal environments. Earth Sci. Rev. 2008, 89, 116–134. [Google Scholar] [CrossRef]
- Fiorentino, D.; Pesch, R.; Guenther, C.-P.; Gutow, L.; Holstein, J.; Dannheim, J.; Ebbe, B.; Bildstein, T.; Schroeder, W.; Schuchardt, B.; et al. A ’fuzzy clustering‘ approach to conceptual confusion: How to classify natural ecological associations. Mar. Ecol. Prog. Sers. 2017, 584, 17–30. [Google Scholar] [CrossRef]
- Beisiegel, K.; Darr, A.; Gogina, M.; Zettler, M.L. Benefits and shortcomings of non-destructive benthic imagery for monitoring hard-bottom habitats. Mar. Pollut. Bull. 2017, 121, 5–15. [Google Scholar] [CrossRef] [PubMed]
- Eleftheriou, A.; Moore, D.C. Macrofauna techniques. In Methods for the Study of Marine Benthos, 4th ed.; Eleftheriou, A., Ed.; Willey Blackwell: Oxford UK, 2013; pp. 175–251. ISBN 9780470670866. [Google Scholar]
- Jamieson, A.J.; Boorman, B.; Jones, D.O.B. Deep-sea benthic sampling. In Methods for the Study of Marine Benthos, 4th ed.; Eleftheriou, A., Ed.; Willey Blackwell: Oxford, UK, 2013; pp. 285–347. ISBN 9780470670866. [Google Scholar]
- Rees, H.L. Guidelines for the Study of the Epibenthos of Subtidal Environments; ICES Techniques in Marine Environmental Sciences: No. 42; ICES: Copenhagen, Denmark, 2009; p. 90. ISBN 978-87-7482-045-1. [Google Scholar]
- Hamilton, L.J. Acoustic Seabed Classification Systems; Defence Science and Technology Organization, Victoria (Australia), Aeronautical and Maritime Research Lab, No. DSTO-TN-0401; National Library of Australia: Canberra, Australia, 2001.
- Humborstad, O.-B.; Nøttestad, L.; Løkkeborg, S.; Rapp, H.T. RoxAnn bottom classification system, sidescan sonar and video-sledge: Spatial resolution and their use in assessing trawling impacts. ICES J. Mar. Sci. 2004, 61, 53–63. [Google Scholar] [CrossRef]
- Michaelis, R.; Hass, H.C.; Mielck, F.; Papenmeier, S.; Sander, L.; Ebbe, B.; Gutow, L.; Wiltshire, K.H. Hard-substrate habitats in the German Bight (south-eastern North Sea) observed using drift videos. J. Sea Res. 2018, under review.
- Müller, S.; Wunderlich, J. Detection of embedded objects using parametric sub-bottom profiler. Int. Hydrogr. Rev. 2003, 4, 76–82. [Google Scholar]
- Von Deimling, J.S.; Held, P.; Feldens, P.; Wilken, D. Effects of using inclined parametric echosounding on sub-bottom acoustic imaging and advances in buried object detection. Geo-Mar. Lett. 2016, 36, 113–119. [Google Scholar] [CrossRef]
- Dybedal, J.; Bøe, R. Ultra high resolution sub-bottom profiling for detection of thin layers and objects. In Proceedings of the OCEANS ‘94. ‘Oceans Engineering for Today’s Technology and Tomorrow’s Preservation’, Brest, France, 13–16 September 1994. [Google Scholar] [CrossRef]
- Lo Iacono, C.; Mateo, M.A.; Gràcia, E.; Guasch, L.; Carbonell, R.; Serrano, L.; Serrano, O.; Danobeitia, J. Very high-resolution seismo-acoustic imaging of seagrass meadows (Mediterranean Sea): Implications for carbon sink estimates. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Diesing, M.; Kubicki, A.; Winter, C.; Schwarzer, K. Decadal scale stability of sorted bedforms, German Bight, southeastern North Sea. Cont. Shelf Res. 2006, 26, 902–916. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cruise | Time | pSES Frequency | pSES Pulse Length |
|---|---|---|---|
| HE400 | May 2013 | 6 kHz | 2 |
| HE415 | February 2014 | 10 kHz | 2 |
| HE436 | November 2014 | 8 kHz | 2 |
| HE438/439 | February/March 2015 | 8, 15 kHz | 1, 2 |
| Frequency | Pulse Length | |
|---|---|---|
| 1 | 2 | |
| 6 kHz | 12.5 cm | 25 cm |
| 8 kHz | 9.4 cm | 18.8 cm |
| 10 kHz | 7.5 cm | 15 cm |
| 15 kHz | 5 cm | 10 cm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papenmeier, S.; Hass, H.C. Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys. Geosciences 2018, 8, 279. https://doi.org/10.3390/geosciences8080279
Papenmeier S, Hass HC. Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys. Geosciences. 2018; 8(8):279. https://doi.org/10.3390/geosciences8080279
Chicago/Turabian StylePapenmeier, Svenja, and H. Christian Hass. 2018. "Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys" Geosciences 8, no. 8: 279. https://doi.org/10.3390/geosciences8080279
APA StylePapenmeier, S., & Hass, H. C. (2018). Detection of Stones in Marine Habitats Combining Simultaneous Hydroacoustic Surveys. Geosciences, 8(8), 279. https://doi.org/10.3390/geosciences8080279