Mud Flow Reconstruction by Means of Physical Erosion Modeling, High-Resolution Radar-Based Precipitation Data, and UAV Monitoring

Abstract
1. Introduction
2. Materials and Methods
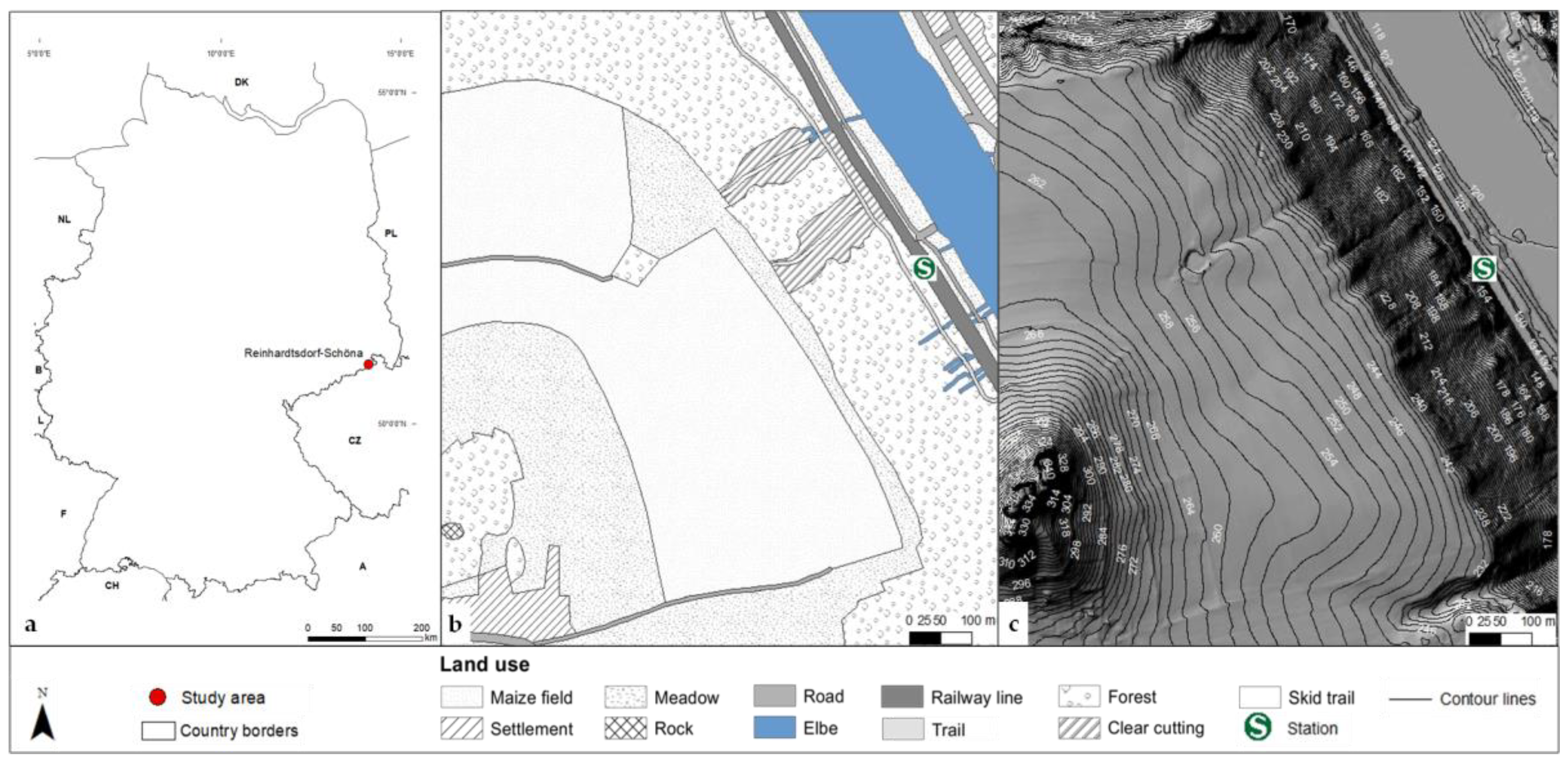
2.1. Study Area
2.2. High-Resolution Radar-Based Precipitation Data
2.2.1. Data Description
2.2.2. Data Preparation and Analysis
2.2.3. Data Comparison with Rain Gauge Data
2.3. High-Resolution Physical Erosion Modeling Using EROSION 3D
2.3.1. Modeling Approach and Components
2.3.2. Input and Output Data
2.3.3. Model Parameterization
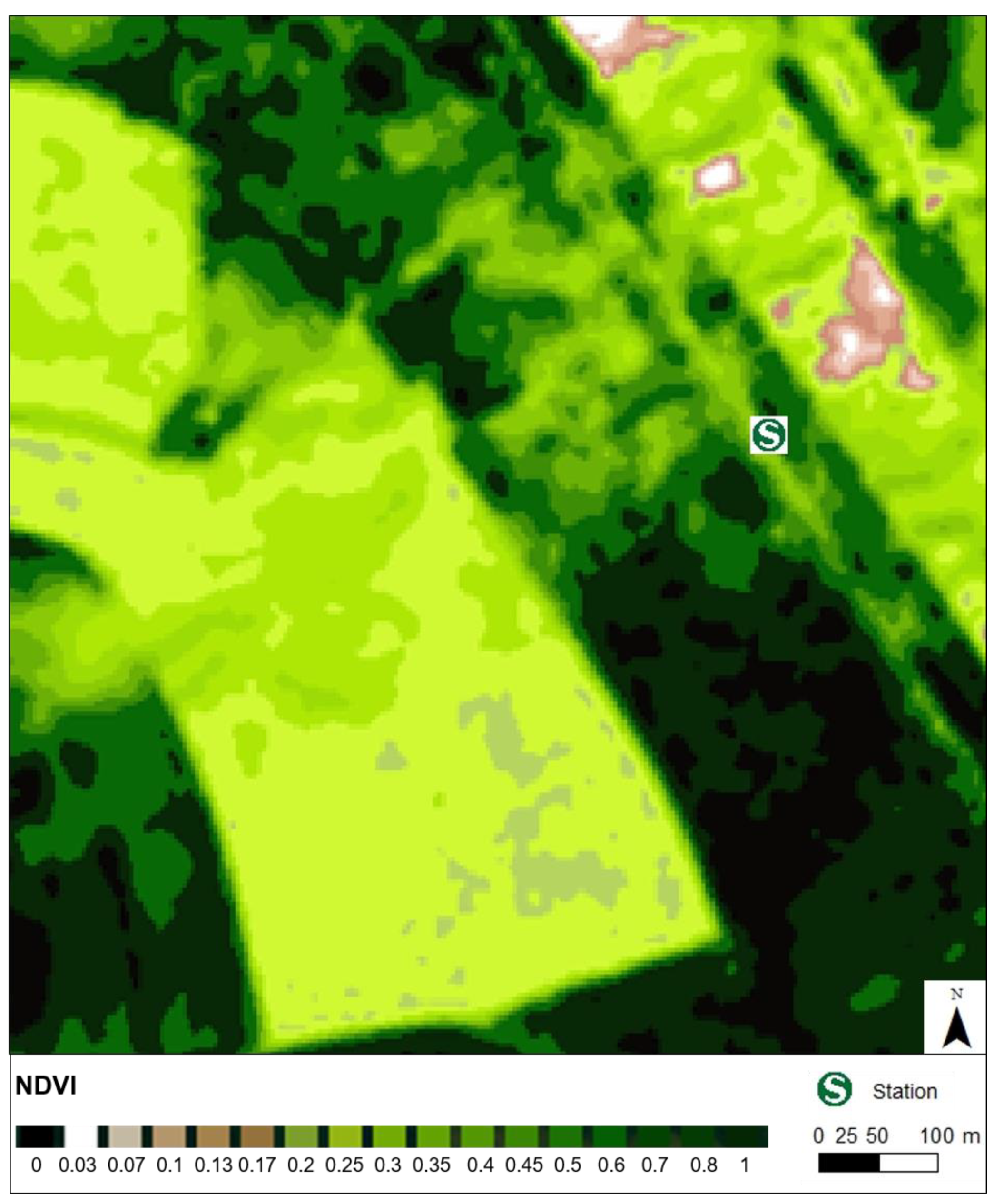
2.3.4. Derivation of Land Cover from NDVI Products of Land Viewer
2.3.5. Soil Moisture Modeling Using METVER
2.3.6. Comparison of Model Results with Undisturbed Forest Model Results
2.4. UAV Monitoring
2.4.1. UAV and Digital Camera
2.4.2. SfM Photogrammetry
3. Results
3.1. High-Resolution Radar Precipitation Data
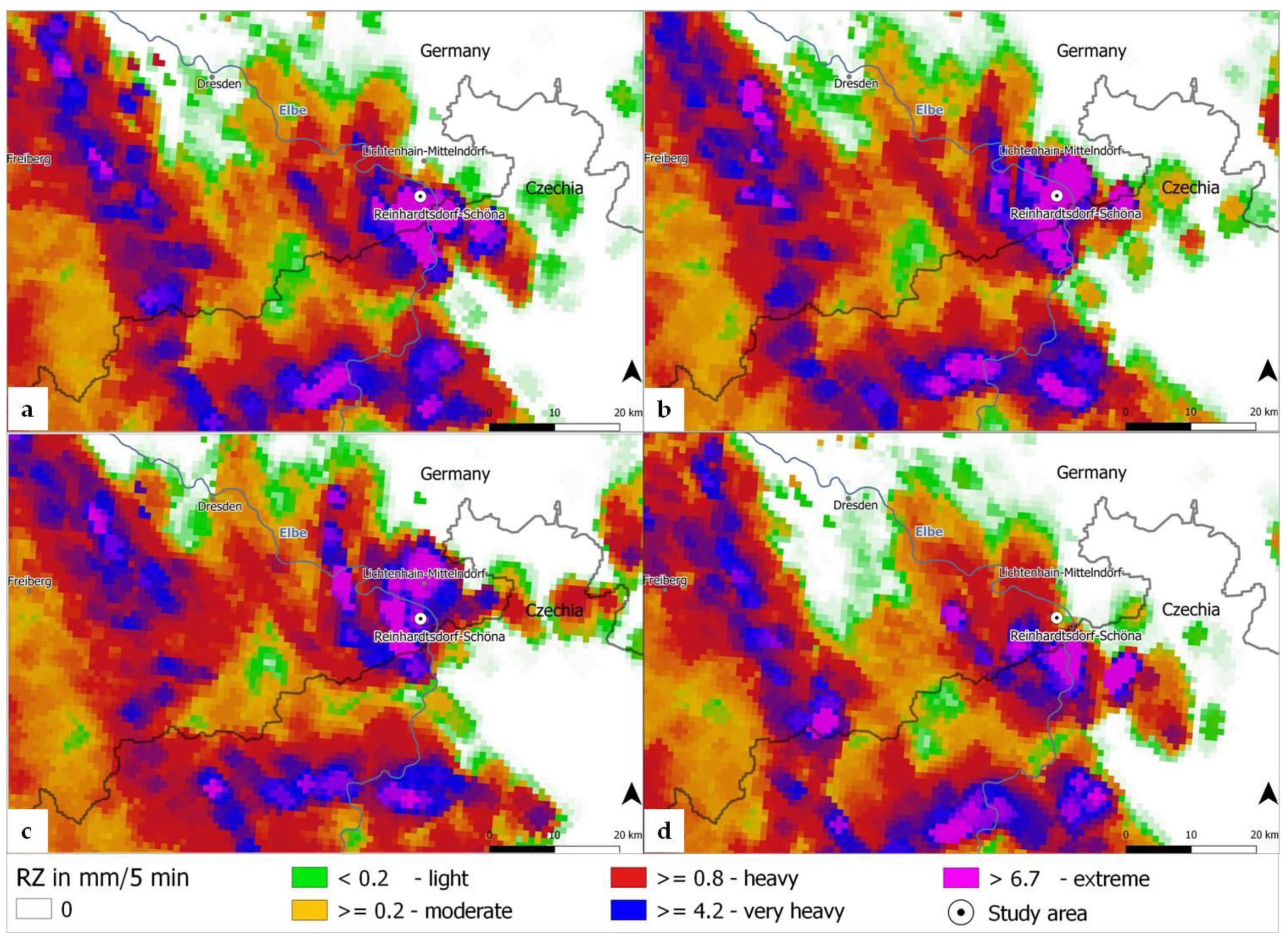
3.1.1. The RZ-Product
3.1.2. The RY-Product
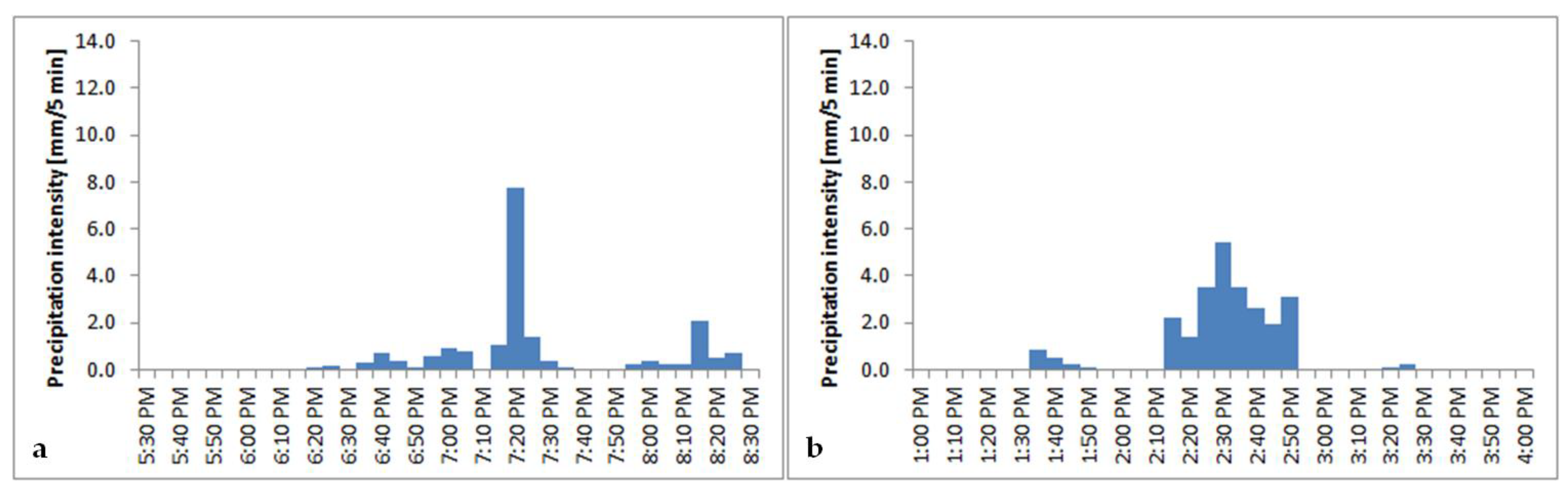
3.1.3. Data Comparison with Rain Gauge Data
3.2. High-Resolution Physical Erosion Modeling Using EROSION 3D
3.2.1. Soil Erosion Modeling for 23 May 2016
3.2.2. Soil Erosion Modeling for 31 May 2016
3.2.3. Comparison of Model Results with Undisturbed Forest Model Results
3.3. UAV Monitoring
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DLM | Digital Landscape Model |
| DTM | Digital Terrain Model |
| DWD | german term, abbreviated from Deutscher Wetterdienst meaning German Meteorological Service |
| E 3D | EROSION 3D Soil Erosion Model |
| GIS | Geographic Information System |
| METVER | german term, abbreviated from METeorologisches VERdunstungsmodell, meaning meteorological evaporation model |
| NDVI | Normalized Difference Vegetation Index |
| RADOLAN | german term, abbreviated from RADar-OnLine-ANeichung meaning Radar Online Adjustment |
| SfM | Structure from Motion |
| UAV | Unmanned Aerial Vehicle |
References
- Ziese, M.; Junghänel, T.; Becker, A. Andauernde Großwetterlage Tief Mitteleuropa Entfaltet Ihr Unwetterpotential mit Starken Gewittern und Massiven Schadensgeschehen in Deutschland. Available online: https://www.dwd.de/DE/leistungen/besondereereignisse/niederschlag/20160603_starkregen_mai-2016_medlung.pdf (accessed on 18 July 2018).
- Bronstert, A.; Agarwal, A.; Boessenkool, B.; Fischer, M.; Heistermann, M.; Köhn-Reich, L.; Moran, T.; Wendi, D. Die Sturzflut von Braunsbach am 29. Mai 2016—Entstehung, Ablauf und Schäden eines “Jahrhundertereignisses”. Teil 1: Meteorologische und hydrologische Analyse. The Braunsbach Flashflood of Mai 29th, 2016—Origin, Pathways and Impacts of an Extreme Hydro-Meteorological Event. Part 1: Meteorological and Hydrological Analysis. Hydrol. Wasserbewirtsch. 2017, 61, 150–162. [Google Scholar] [CrossRef]
- earth-chronicles.com. A Landslide Disrupted Rail Service between Dresden and Prague. Available online: http://earth-chronicles.com/natural-catastrophe/a-landslide-disrupted-rail-service-between-dresden-and-prague.html (accessed on 14 September 2016).
- Radio Leipzig. Unwetter Sorgt für Schäden in Sächsischer Schweiz. Available online: www.radioleipzig.de/beitrag/unwetter-sorgt-fuer-schaeden-in-saechsischer-schweiz-230485 (accessed on 23 July 2018).
- DWD Wetterlexikon. Available online: www.dwd.de/lexikon (accessed on 22 July 2018).
- DWA-Themen. Niederschlagserfassung durch Radar und Anwendung in der Wasserwirtschaft—T2/2017; Deutsche Vereinigung für Wasserwirtschaft, Abwasser und Abfall e. V.: Hennef, Germany, 2017; pp. 1–99. ISBN 978-3-88721-478-4. [Google Scholar]
- Yu, B.; Seed, A.; Lin, P.; Malone, T. Integration of weather radar data into a raster GIS framework for improved flood estimation. Atmos. Sci. Lett. 2005, 6, 66–70. [Google Scholar] [CrossRef]
- Yu, B.; Seed, A.; Trevithick, R.; Morris, K. Design and testing of a real-time flood forecasting system for urban catchments. Aust. J. Water Resour. 2007, 11, 161–168. [Google Scholar] [CrossRef]
- Von Werner, M. Erosion-3D Benutzerhandbuch; Version 3.0.; Michael von Werner: Berlin, Germany, 2002; pp. 1–82. [Google Scholar]
- Schmidt, J. Entwicklung und Anwendung eines physikalisch begründeten Simulationsmodells für die Erosion geneigter, landwirtschaftlicher Nutzflächen. Berliner Geographische Abhandlungen 1996, 61, 1–148. [Google Scholar]
- Klik, A.; Zartl, A.S.; Hebel, B.; Schmidt, J. Comparing RUSLE, EROSION 2D/3D, and WEPP Soil Loss Calculations with Four Years of Observed Data; ASAE. Annual International Meeting: Orlando, Florida, USA, 1998; ASAE No. 982055; 11p. [Google Scholar]
- Jetten, V.; de Roo, A.; Favis-Mortlock, D. Evaluation of field-scale and catchment-scale soil erosion models. Catena 1999, 37, 521–541. [Google Scholar] [CrossRef]
- Schmidt, J.; von Werner, M.; Michael, A. Application of the EROSION 3D Model to the Catsop Watershed, The Netherlands. Catena 1999, 37, 449–456. [Google Scholar] [CrossRef]
- Hebel, B. Validierung numerischer Erosionsmodelle in Einzelhang und Einzugsgebietsdimension. Physiogeographica Baseler Beiträge zur Physiogeographie 2003, 32, 1–181. [Google Scholar]
- Michael, A.; Schmidt, J.; Enke, W.; Deutschländer, T.; Malitz, G. Impact of expected increase in precipitation intensities on soil loss—Results of comparative model simulations. Catena 2005, 61, 155–164. [Google Scholar] [CrossRef]
- Schob, A.; Schmidt, J.; Tenholtern, R. Derivation of site-related measures to minimise soil erosion on the watershed scale in the Saxonian loess belt using the model EROSION 3D. Catena 2006, 68, 153–160. [Google Scholar] [CrossRef]
- Schilde, M. Modelling Soil Erosion in the Zhifanggou-Watershedon the Chinese Loess Plateau using EROSION 2/3D; TU Bergakademie Freiberg: Freiberg, Germany, 2008; 79p. [Google Scholar]
- Seidel, N. Untersuchung der Wirkung Verschiedener Landnutzungen auf Oberflächenabfluss und Bodenerosion mit Einem Simulationsmodell. Ph.D. Thesis, TU Bergakademie Freiberg, Freiberg, Germany, 2008. [Google Scholar]
- Schindewolf, M.; Schmidt, W. Validierung EROSION 3D—Prüfung und Validierung des neu entwickelten Oberflächenabflussmoduls des Modells EROSION 3D im Zusammenhang mit Maßnahmen des vorsorgenden Hochwasserschutzes auf landwirtschaftlich genutzten Flächen. Schriftenr. Landesamtes Umwelt Landwirtsch. Geol. 2009, Heft 15, 1–121. Available online: http://nbn-resolving.de/urn:nbn:de:bsz:14-ds-1244617738468-42743.
- Schindewolf, M. Prozessbasierte Modellierung von Erosion, Deposition und Partikelgebundenem Nähr- und Schadstofftransport in der Einzugsgebiet- und Regionalskala. Ph.D. Thesis, TU Bergakademie Freiberg, Freiberg, Germany, 2012. [Google Scholar]
- Steinz, A. Prozessbasierte Ermittlung des Jährlichen Partikelgebundenen Schwermetallaustrages im Einzugsgebiet der Mulde. Master’s Thesis, TU Bergakademie Freiberg, Freiberg, Germany, 2014. [Google Scholar]
- Starkloff, T.; Stolte, J. Applied comparison of the erosion risk models EROSION 3D and LISEM for a small catchment in Norway. Catena 2014, 118, 154–167. [Google Scholar] [CrossRef]
- Schindewolf, M.; Kaiser, A.; Buchholtz, A.; Schmidt, J. Development of a flash flood warning system based on real-time radar data and process-based erosion modelling. In EGU General Assembly Conference Abstracts; EGU2017-18057; EGU General Assembly: Vienna, Austria, 2017; Volume 19. [Google Scholar]
- BK 50 2012: Sächsisches Landesamt für Umwelt, Landwirtschaft und Geologie. Available online: https://www.umwelt.sachsen.de/umwelt/boden/27787.htm (accessed on 21 July 2018).
- OSM Boundaries Map 4.4.6. Wambachers-OSM.website. Available online: https://wambachers-osm.website/boundaries/ (accessed on 28 September 2018).
- DWD RADOLAN Produktübersicht. Available online: www.dwd.de/RADOLAN (accessed on 6 December 2017).
- DWD RADOLAN Kurzbeschreibung. Available online: www.dwd.de/RADOLAN (accessed on 15 December 2017).
- DWD. Feinspezifikation für die Erstellung eines Qualitätskomposits, Version 3.2. 2005; written communication.
- Heistermann, M.; Jacobi, S.; Pfaff, T. Technical Note: An open source library for processing weather radar data (wradlib). Hydrol. Earth Syst. Sci. 2013, 17, 863–871. [Google Scholar] [CrossRef]
- QGIS 2018. QGIS Version 3.0.1—Girona 64 bit. Available online: https://www.qgis.org (accessed on 10 April 2018).
- Open Data Server DWD 2018. Data Source: Deutscher Wetterdienst. Available online: https://opendata.dwd.de/ (accessed on 1 July 2018).
- Schmidt, J. A mathematical model to simulate rainfall erosion. In Erosion, Transport and Deposition Processes—Theories and Models; Catena Supplement; Bork, H.-R., de Ploey, J., Schick, A.P., Eds.; Catena Verlag: Cremlingen-Destedt, Germany, 1991; Volume 19, pp. 101–109. [Google Scholar]
- Schmidt, J. Modeling long term soil loss and landform change. In Overland Flow—Hydraulics and Erosion Mechanics; Parson, A.J., Abrahams, A.D., Eds.; UCL Press: London, UK, 1992; pp. 409–433. [Google Scholar]
- Von Werner, M. GIS-orientierte Methoden der Digitalen Reliefanalyse zur Modellierung von Bodenerosion in Kleinen Einzugsgebieten. Ph.D. Thesis, Freie Universität Berlin, Berlin, Germany, 1995. [Google Scholar]
- Green, W.H.; Ampt, G.A. Studies on soil physics. J. Agric. Sci. 1911, 4, 1–24. [Google Scholar] [CrossRef]
- Von Werner, M. Abschätzung des Oberflächenabflusses und der Wasserinfiltration auf landwirtschaftlich Genutzten Flächen mit Hilfe des Modells EROSION 3D; Endbericht; GeoGnostic: Berlin, Germany, 2004. [Google Scholar]
- LfUG. Bodenerosionsmessprogramm Sachsen—Auswertung der Beregnungsversuche 1–28 vom 04.-31.10.1993; LfUG: Freiberg, Germany, 1994. [Google Scholar]
- LfUG. Bodenerosionsmessprogramm Sachsen—Auswertung der Beregnungsversuche 29–49 vom 02.-12.05.1994; LfUG: Freiberg, Germany, 1994. [Google Scholar]
- LfUG. Bodenerosionsmessprogramm Sachsen—Auswertung der Beregnungsversuche 50–76 vom 26.09.-12.10.1994; LfUG: Freiberg, Germany, 1995. [Google Scholar]
- LfUG. Bodenerosionsmessprogramm Sachsen—Auswertung der Beregnungsversuche 77–94 vom 09.05.-19.5.1995; LfUG: Freiberg, Germany, 1995. [Google Scholar]
- LfUG. Bodenerosionsmessprogramm Sachsen—Auswertung der Beregnungsversuche 95–116 vom 03.10.-13.10.1996; LfUG: Freiberg, Germany, 1996. [Google Scholar]
- Kunth, F.; Kaiser, A.; Vláčilová, M.; Schindewolf, M.; Schmidt, J. Extensive Rill Erosion and Gullying on Abandoned Pit Mining Sites in Lusatia, Germany; EGU General Assembly: Vienna, Austria, 2015. [Google Scholar]
- Michael, A.; Schmidt, J.; Schmidt, W. Band II: Parameterkatalog Sachsen Anwendung. In EROSION 2D/3D—Ein Computermodell zur Simulation der Bodenerosion durch Wasser; Sächsische Landesanstalt für Landwirtschaft, Sächsisches Landesamt für Landwirtschaft, Umwelt und Geologie: Dresden, Freiberg, Germany, 1996; p. 121. [Google Scholar]
- Seibert, S.; Auerswald, K.; Fiener, P.; Disse, M.; Martin, W.; Haider, J.; Michael, A.; Gerlinger, K. Surface runoff from arable land—A homogenized data base of 726 rainfall simulation experiments. Hydrol. Earth Sys. Sci. 2011. [Google Scholar] [CrossRef]
- LfL. Erarbeitung der Digitalen Datengrundlage für die Anwendung von EROSION-3D auf Mesoskaliger Maßstabsebene mit Durchführung einer Erosionssimulation für das zu Bearbeitende Gebiet, Endbericht des FuE-Vorhabens der LfL; GeoGnostics: Leipzig/Berlin, Germany, 2005; pp. 1–88. [Google Scholar]
- Schindewolf, M.; Schmidt, J.; von Werner, M. Modeling soil erosion and resulting sediment transport into surface water courses on regional scale. ZfG Suppl. Issues 2013, 57, 157–175. [Google Scholar] [CrossRef]
- DTM2 2016: Staatsbetrieb Geobasisinformation und Vermessung Sachsen. Kachelnummer 4445636 und 4445638. State 2005. Available online: http://www.landesvermessung.sachsen.de/inhalt/produkte/dhm/dgm/dgm.html (accessed on 21 November 2018).
- WMS Digitale Orthophotos (RGB) 2015: Staatsbetrieb Geobasisinformation und Vermessung Sachsen. Available online: https://geodienste.sachsen.de/wms_geosn_dop-rgb/guest? (accessed on 21 July 2018).
- ArcGIS 2015. Esri ArcGIS 10.4.1 for Desktop, Version 10.4.1.5686. Available online: https://www.esri.de/support-de/produkte/startset-arcgis-104 (accessed on 21 November 2018).
- Arévalo, S.A. Simulation of a Local Flood Event in a Settling Area with EROSION 3D. Diploma thesis, TU Bergakademie Freiberg, Freiberg, Germany, 2009. [Google Scholar]
- Zemke, J. Runoff and Soil Erosion Assessment on Forest Roads Using a Small Scale Rainfall Simulator. Hydrology 2016, 3, 25. [Google Scholar] [CrossRef]
- Land Viewer 2018: EOS Data Analytics, Inc. Available online: https://eos.com/landviewer (accessed on 21 July 2018).
- Blume, H.-P.; Brümmer, G.W.; Fleige, H.; Horn, R.; Kandeler, E.; Kögel-Knabner, I.; Kretzschmar, R.; Stahr, K.; Wilke, B.-M. Scheffer/Schachtschabel Soil Science, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Müller, J.; Müller, G. Berechnung der Verdunstung landwirtschaftlicher Produktionsgebiete, 1. Mitteilung. Z. Meteorol. 1988, 38, 332–336. [Google Scholar]
- Müller, J.; Müller, G. Berechnung der Verdunstung landwirtschaftlicher Produktionsgebiete, 2. Mitteilung. Z. Meteorol. 1988, 38, 361–365. [Google Scholar]
- Müller, J.; Müller, G. Berechnung der Verdunstung landwirtschaftlicher Produktionsgebiete, 3. Mitteilung. Z. Meteorol. 1989, 39, 142–149. [Google Scholar]
- Turc, L. Évaluation des besoins en eau d’irrigation, évapotranspiration potentielle, formule simplifiée et mise à jour. Ann. Agron. 1961, 12, 13–49. [Google Scholar]
- Wendling, U.; Schellin, H.-G.; Thomä, M. Bereitstellung von täglichen Informationen zum Wasserhaushalt des Bodens für die Zwecke der agrarmeteorologischen Beratung. Z. Meteorol. 1991, 41, 468–475. [Google Scholar]
- Pilz, C. Einfluss des Klimawandels auf die Bodenfeuchte im Oberboden—Vergleichende Modellsimulationen mit dem Modell METVER auf der Grundlage von WETTREG-Klimaszenarien. Bachelor’s Thesis, TU Bergakademie Freiberg, Freiberg, Germany, 2011. [Google Scholar]
- Routschek, A. Auswirkungen des Klimawandels auf die Bodenerosion. Schriftenreihe des LfULG 2012, H 29, 1–138. [Google Scholar]
- Agisoft 2016: Agisoft PhotoScan Professional. Version 1.2.5 Build 2735 (64 bit). Agisoft LLC: St. Petersburg, Russia, 2016. Available online: http://www.agisoft.com/ (accessed on 21 November 2018).
- DWD RADOLAN/RADVOR-OP (Sachstand und Ausblick). Available online: https://www.dwd.de/DE/leistungen/radolan/radarniederschlagsprodukte/vortrag_2010_pdf (accessed on 15 December 2017).
- Einfalt, T.; Frerk, I. The challenge to estimate extreme precipitation for locations without rain gauges. In Proceedings of the ERAD 2012—The seventh European Conference on Radar in Meteorology and Hydrology, Toulouse, France, 25–29 June 2012. [Google Scholar]
- Peters, T. Ableitung einer Beziehung zwischen der Radarreflektivität, der Niederschlagsrate und weiteren aus Radardaten abgeleiteten Parametern unter Verwendung von Methoden der multivariaten Statistik. Ph.D. Thesis, Universität Fridericiana zu Karlsruhe (TH), Karlsruhe, Germany, 2008. [Google Scholar]
- n-tv.de 2016: Bahnstrecke Dresden-Prag Ist Wieder Frei. Nach Erdrutsch Blockiert. Available online: https://www.n-tv.de/panorama/Bahnstrecke-Dresden-Prag-ist-wieder-frei-article17760816.html?serv= (accessed on 23 July 2018).
- mdr.de 2016: Nach Erdrutsch. Bahnstrecke Dresden-Prag Wieder Frei. Available online: http://www.mdr.de/sachsen/erdrutsch-bahnstrecke-dresden-prag-gesperrt-100_zc-ecc53a13_zs-...1 (accessed on 14 September 2016).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intensity | mm/5 min 1 | mm/10 min | mm/h |
|---|---|---|---|
| Light | <0.2 | <0.5 | <2.5 |
| Moderate | ≥0.2–<0.8 | ≥0.5–<1.7 | ≥2.5–<10.0 |
| Heavy | ≥0.8–<4.2 | ≥1.7–<8.3 | ≥10.0–<50.0 |
| Very heavy | ≥4.2–<6.7 | ≥8.3–<13.3 | ≥50.0–<80.0 |
| Extreme | ≥6.7 | ≥13.3 | ≥80.0 |
| Land Use | Bulk Density | Organic Carbon | Skinfactor | Initial Moisture | Hydraulic Roughness | Erosion Resistance | Cover | Soil Texture |
|---|---|---|---|---|---|---|---|---|
| Forest | 1000 | 0.9 | 8 | METVER 1 | 0.9 | 0.1 | 100 | Pure sand |
| Land Use | Bulk Density | Organic Carbon | Skinfactor | Initial Moisture | Hydraulic Roughness | Erosion Resistance | Cover | Soil Texture |
|---|---|---|---|---|---|---|---|---|
| Forest | 1400 | 0.9 | 8 | METVER 1 | 0.9 | 0.1 | 100 | Pure sand |
| Skid trail | 1800 | 0.9 | 0.01 | METVER 1 | 0.02 | 0.001 | 0 | Pure sand |
| Clear cutting | 1700 | 0.9 | 0.1 | METVER 1 | 0.1 | 0.02 | 20 | Pure sand |
| Intensity | mm/h | mm/10 min |
|---|---|---|
| RZ 23 May 2016 | 33.3 | 16.6 |
| RY 23 May 2016 | 13.8 | 9.2 |
| Rain gauge 23 May 2016 | 35.5 | 20.2 |
| RZ 31 May 2016 | 54.2 | 14.7 |
| RY 31 May 2016 | 23.8 | 9.0 |
| Rain gauge 31 May 2016 | 30.7 | 15.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hänsel, P.; Kaiser, A.; Buchholz, A.; Böttcher, F.; Langel, S.; Schmidt, J.; Schindewolf, M. Mud Flow Reconstruction by Means of Physical Erosion Modeling, High-Resolution Radar-Based Precipitation Data, and UAV Monitoring. Geosciences 2018, 8, 427. https://doi.org/10.3390/geosciences8110427
Hänsel P, Kaiser A, Buchholz A, Böttcher F, Langel S, Schmidt J, Schindewolf M. Mud Flow Reconstruction by Means of Physical Erosion Modeling, High-Resolution Radar-Based Precipitation Data, and UAV Monitoring. Geosciences. 2018; 8(11):427. https://doi.org/10.3390/geosciences8110427
Chicago/Turabian StyleHänsel, Phoebe, Andreas Kaiser, Arno Buchholz, Falk Böttcher, Stefan Langel, Jürgen Schmidt, and Marcus Schindewolf. 2018. "Mud Flow Reconstruction by Means of Physical Erosion Modeling, High-Resolution Radar-Based Precipitation Data, and UAV Monitoring" Geosciences 8, no. 11: 427. https://doi.org/10.3390/geosciences8110427
APA StyleHänsel, P., Kaiser, A., Buchholz, A., Böttcher, F., Langel, S., Schmidt, J., & Schindewolf, M. (2018). Mud Flow Reconstruction by Means of Physical Erosion Modeling, High-Resolution Radar-Based Precipitation Data, and UAV Monitoring. Geosciences, 8(11), 427. https://doi.org/10.3390/geosciences8110427