Automatic Coastline Extraction Using Edge Detection and Optimization Procedures


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Previous Work
2.1. Satellite Images
2.2. Aerial Images
3. The Proposed Approach
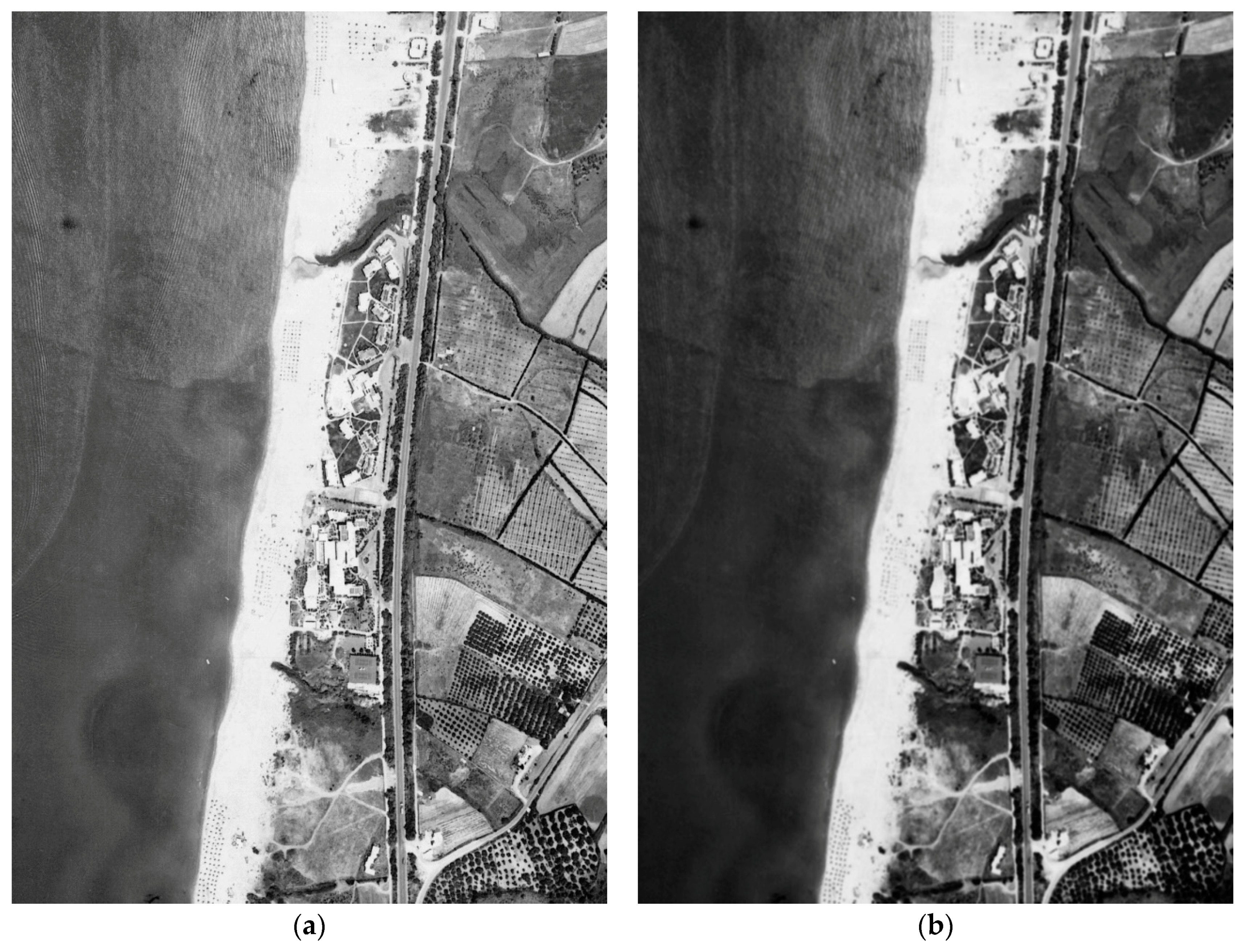
3.1. Data Pre-Processing
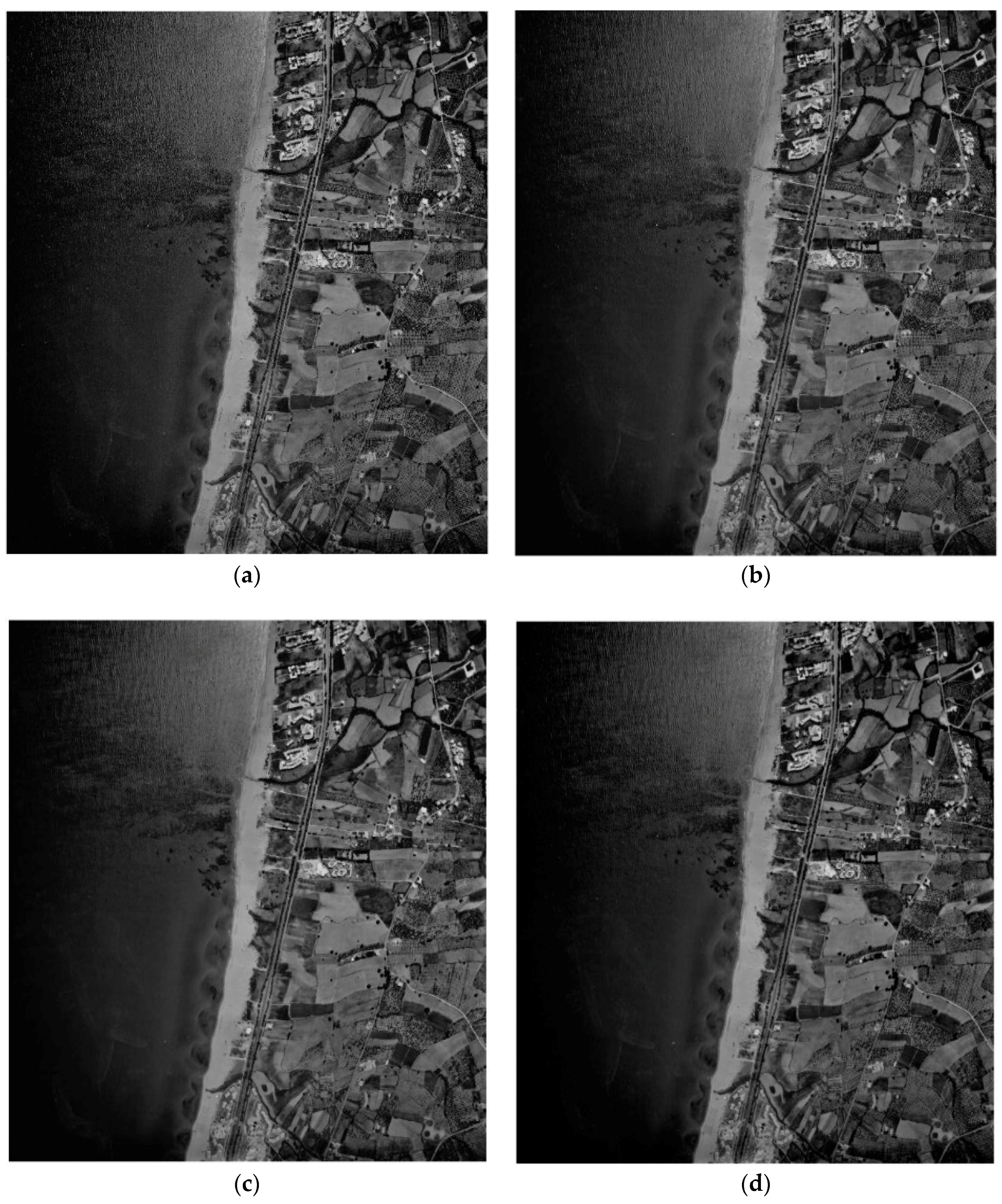
3.1.1. Noise Reduction and edge enhancement
3.1.2. K-means Clustering
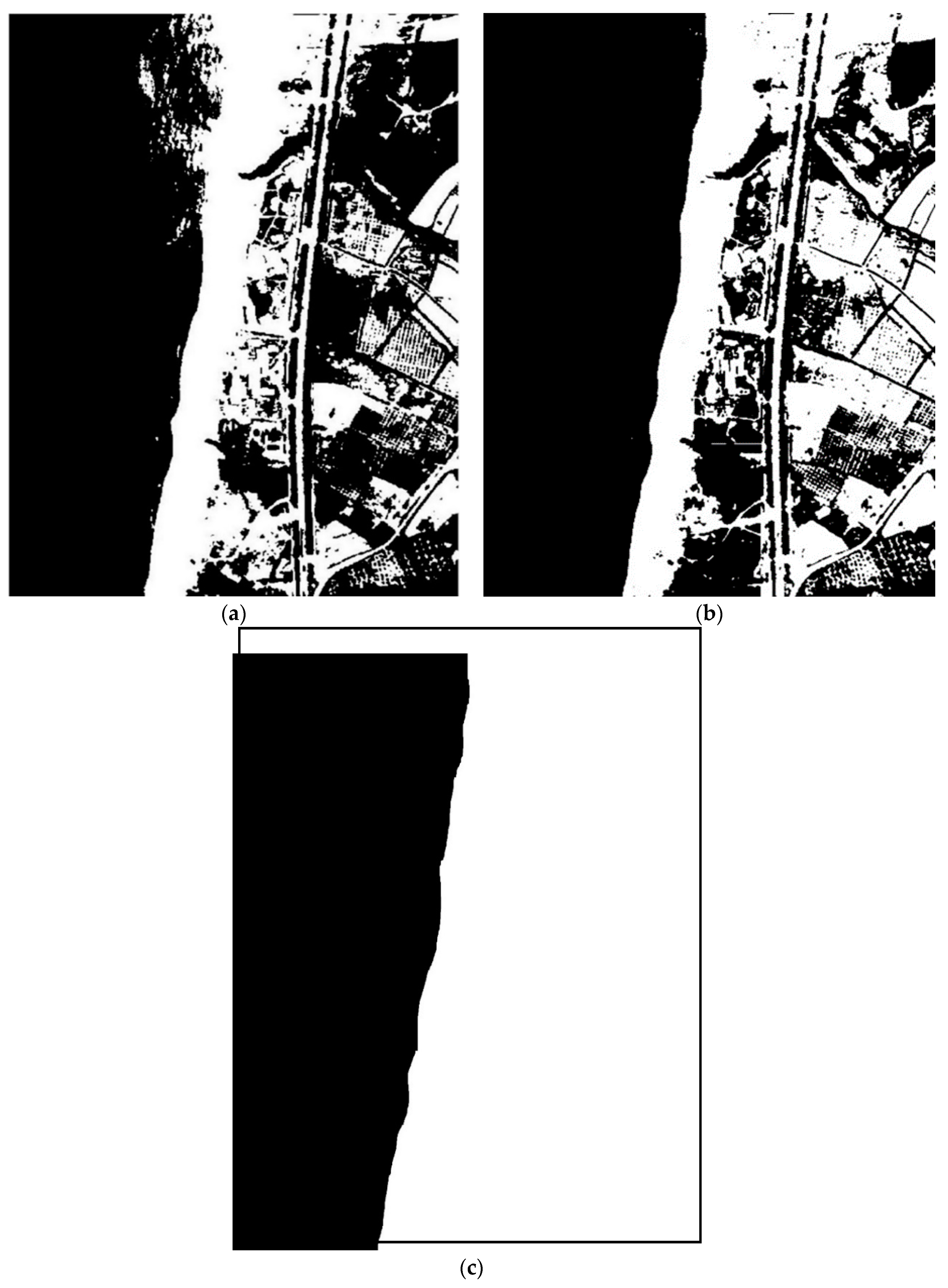
3.2. Image Region Segmentation
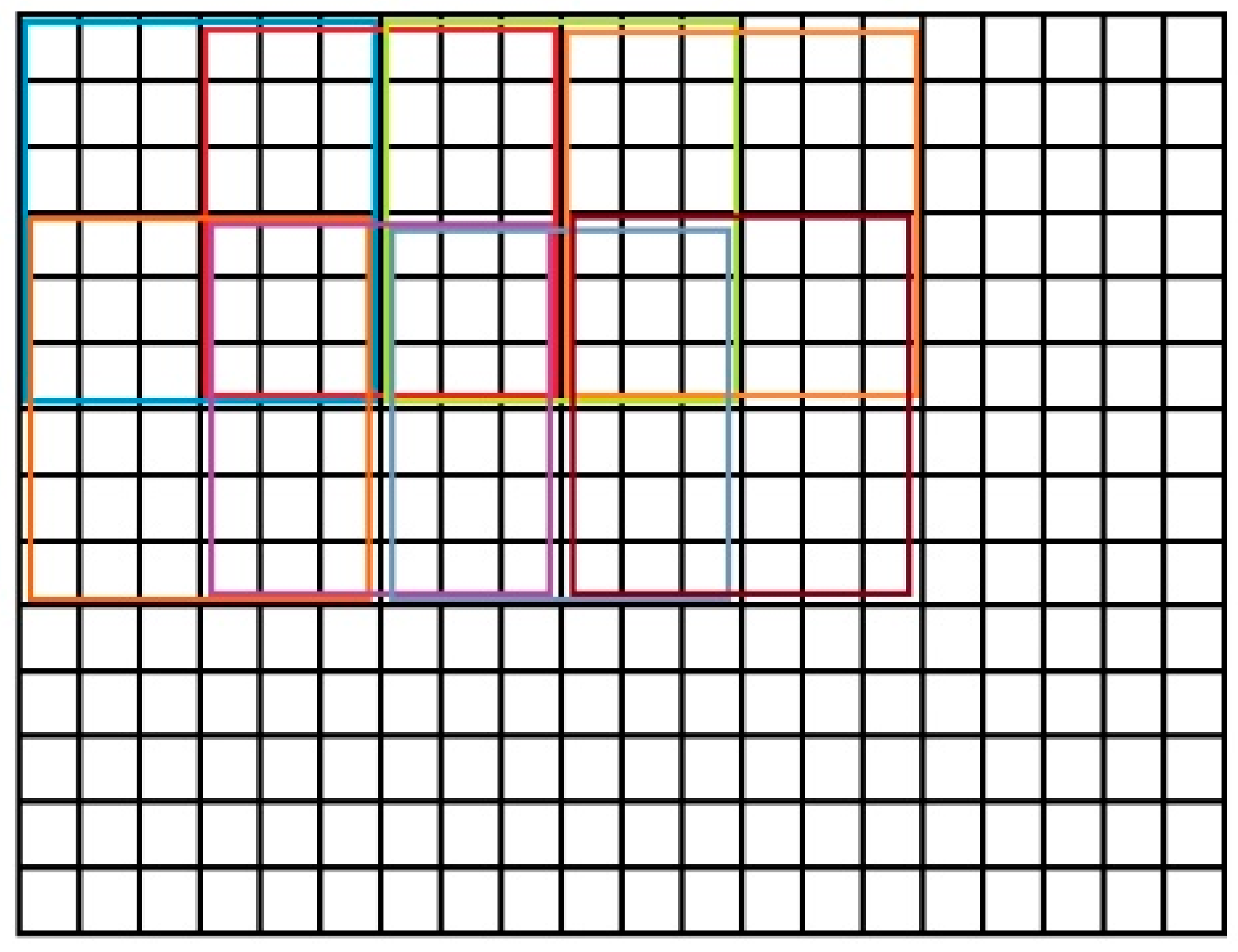
3.2.1. Block Division and Local Thresholding
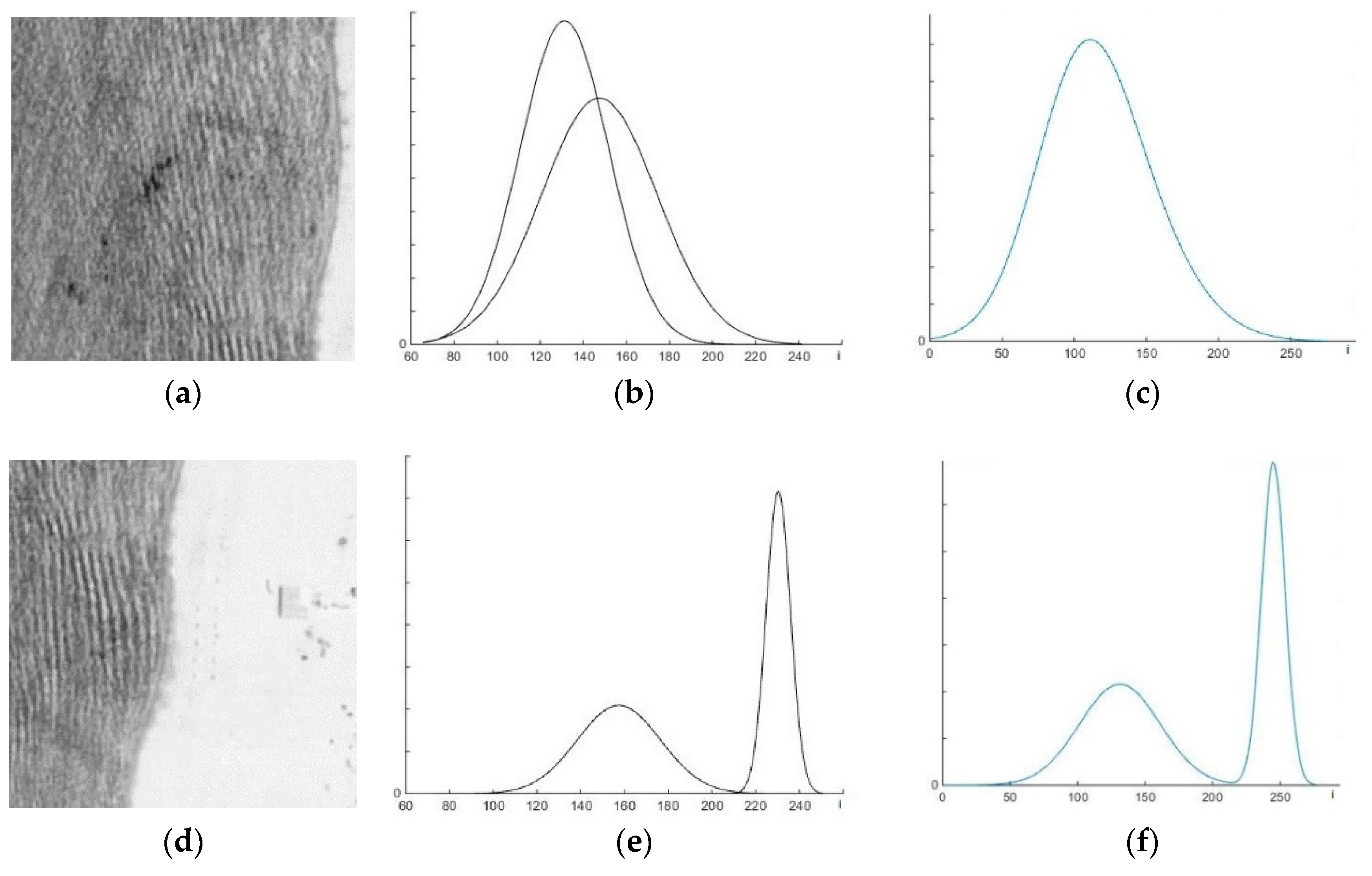
3.2.2. Local Thresholds
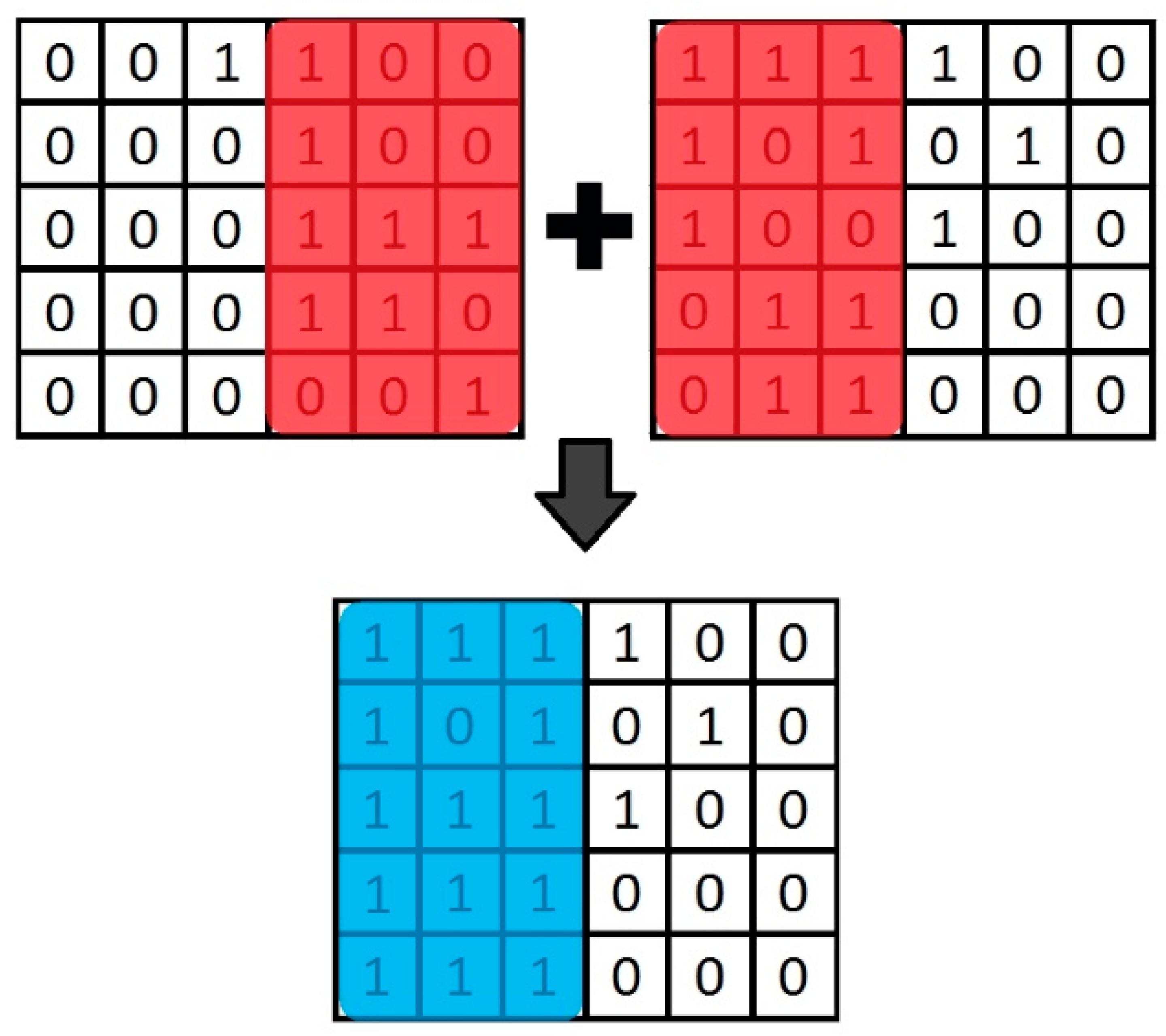
3.3. Data Post-Processing
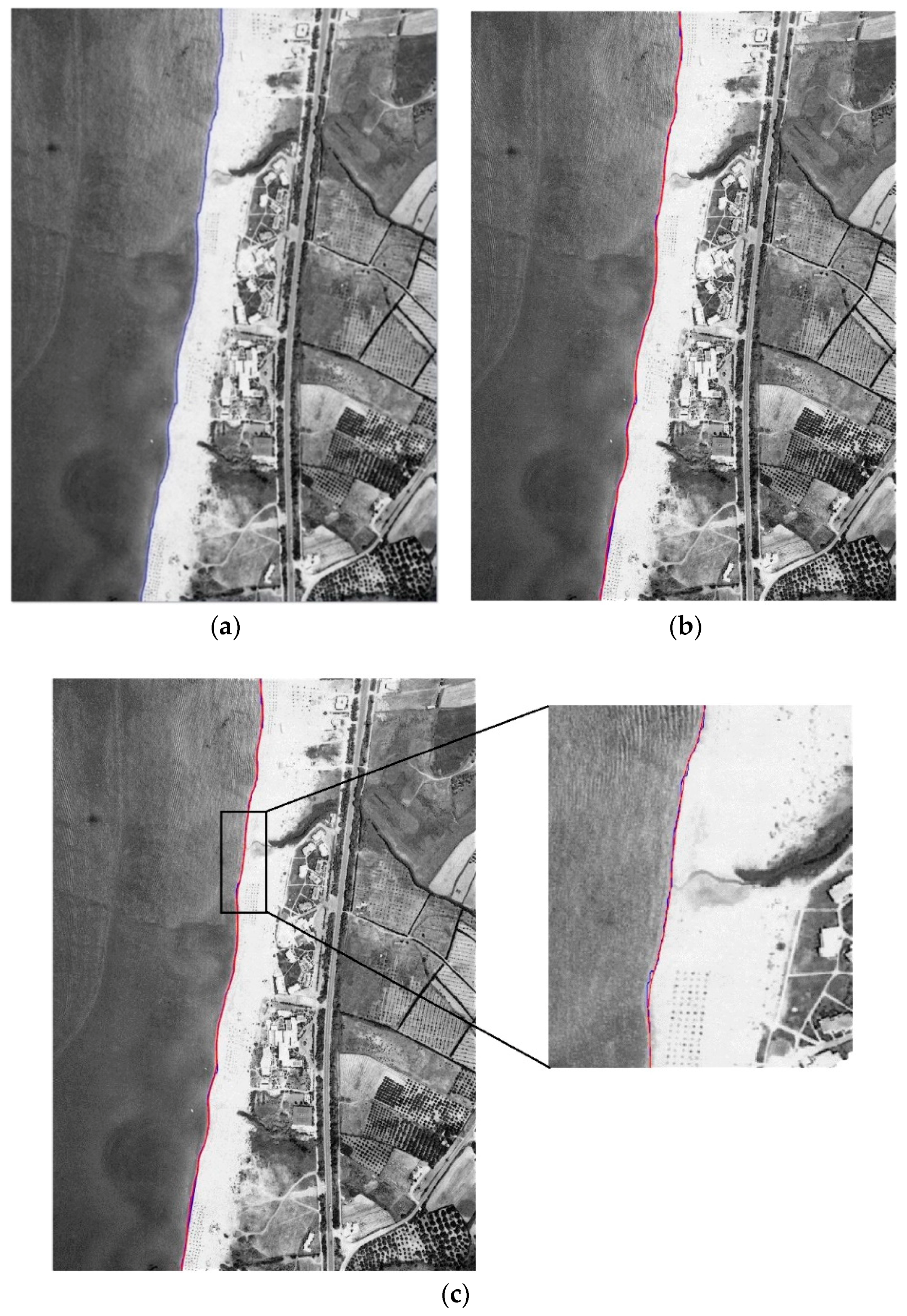
3.4. Coastline Modeling
4. Results
4.1. Coastline Extraction Using Aerial Images
4.2. Coastline Extraction Using Satellite Images
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Church, J.A.; White, N.J. Sea-Level Rise from the Late 19th to the Early 21st Century. Surv. Geophys. 2011, 32, 585–602. [Google Scholar] [CrossRef]
- Coast. Available online: https://en.wikipedia.org/wiki/Coast (accessed on 25 September 2018).
- Effect of Climate Change on Coastline Evolution. Available online: http://www.coastalwiki.org/wiki/Effect_of_climate_change_on_coastline_evolution (accessed on 25 September 2018).
- Aμμος κατά διάβρωσης. Available online: http://www.haniotika-nea.gr/116521-ammos-kata-diabrwsis/ (accessed on 10 May 2018).
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 8, 679–698. [Google Scholar]
- Liu, H.; Jezek, K. Automated extraction of coastline from satellite imagery by integrating canny edge detection and locally adaptive thresholding methods. Int. J. Remote Sens. 2004, 25, 937–958. [Google Scholar] [CrossRef]
- Erteza, I.A. An Automatic Coastline Detector for Use with SAR Images; Technical Report; Sandia National Laboratories (SNL-NM): Albuquerque, NM, USA, 1998.
- Dellepiane, S.; De Laurentiis, R.; Giordano, F. Coastline extraction from SAR images and a method for the evaluation of the coastline precision. Pattern Recogn. Lett. 2004, 25, 1461–1470. [Google Scholar] [CrossRef]
- Modava, M.; Akbarizadeh, G. Coastline extraction from SAR images using spatial fuzzy clustering and the active contour method. Int. J. Remote Sens. 2017, 38, 355–370. [Google Scholar] [CrossRef]
- Bruno, M.; Molfetta, M.G.; Mossa, M.; Morea, A.; Chiaradia, M.T.; Nutricato, R.; Nitti, D.O.; Guerriero, L.; Coletta, A. Integration of multitemporal SAR/InSAR techniques and NWM for coastal structures monitoring: Outline of the software system and of an operational service with COSMO-SkyMed data. In Proceedings of the EESMS, Bari, Italy, 13–14 June 2016. [Google Scholar]
- Braud, D.; Feng, W. Semi-Automated Construction of the Louisiana Coastline Digital Land/Water Boundary Using Landsat Thematic Mapper Satellite Imagery; Louisiana Applied Oil Spill Research and Development Program, OS2 RAPD Technical Report Series 97.002; Louisiana State University: Baton Rouge, LA, USA, 1998. [Google Scholar]
- Frazier, P.S.; Page, K.J. Water body detection and delineation with Landsat TM data. Photogramm. Eng. Remote Sens. 2002, 66, 1461–1468. [Google Scholar]
- Zhang, T.; Yang, X.; Hu, S.; Su, F. Extraction of Coastline in Aquaculture Coast from Multispectral Remote Sensing Images: Object-Based Region Growing Integrating Edge Detection. Remote Sens. 2013, 5, 4470–4487. [Google Scholar] [CrossRef]
- Di, K.; Wang, J.; Ma, R.; Li, R. Automatic Shoreline Extraction from High-Resolution IKONOS Satellite Imagery. In Proceedings of the ASPRS 2003 Annual Conference, Anchorage, AK, USA, 5–9 May 2003. [Google Scholar]
- Puissant, A.; Lefevre, S.E.B.; Weber, J. Coastline Extraction in VHR Imagery Using Mathematical Morphology with Spatial and Spectral Knowledge. In Proceedings of the SPRS Congress Beijing 2008, Beijing, China, 3–11 July 2008; pp. 1305–1310. [Google Scholar]
- Liu, Y.; Wang, X.; Ling, F.; Xu, S.; Wang, C. Analysis of Coastline Extraction from Landsat-8 OLI Imagery. Water 2017, 9, 816. [Google Scholar] [CrossRef]
- Sekovski, I.; Stecchi, F.; Mancini, F. Image classification methods applied to shoreline extraction on very high-resolution multispectral imagery. Int. J. Remote Sens. 2014, 10, 3556–3578. [Google Scholar] [CrossRef]
- Ryan, T.; Sementilli, P.; Yuen, P.; Hunt, B. Extraction of shoreline features by neural nets and image processing. Photogramm. Eng. Remote Sens. 1991, 57, 947–955. [Google Scholar]
- Chalabi, A.; Mohd-Lokman, H.; Mohd-Su_an, I.; Karamali, K.; Karthigeyan, V.; Masita, M. Monitoring shoreline change using ikonos image and aerial photographs: A case study of Kuala Terengganu area, Malaysia. In Proceedings of the ISPRS Commission VII Mid-term Symposium Remote Sensing: From Pixels to Processes, Enschede, The Netherlands, 8–11 May 2006. [Google Scholar]
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Yousef, A.; Iftekharuddin, K. Shoreline extraction from the fusion of LiDAR DEM data and aerial images using mutual information and genetic algorithms. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 1007–1014. [Google Scholar]
- Haupt, R.L.; Haupt, S.E.; Haupt, S.E. Practical Genetic Algorithms; Wiley: New York, NY, USA, 1998; Volume 2. [Google Scholar]
- Willerslev, E. Methods of Extracting a Coastline from Satellite Imagery and Assessing the Accuracy. In Proceedings of the Geospatial Crossroads GI_Forum 2011, Salzburg, Austria, 5–8 July 2011. [Google Scholar]
- Valentini, N.; Saponieri, A.; Molfetta, M.G.; Damiani, L. New algorithms for shoreline monitoring from coastal video systems. Earth Science. Informatics 2017, 10, 495–506. [Google Scholar] [CrossRef]
- Hoonhout, B.M.; Radermacher, M.; Baart, F.; van der Maaten, L.J.P. An automated method for semantic classification of regions in coastal images. Coast. Eng. 2015, 105, 1–12. [Google Scholar] [CrossRef]
- Lisi, I.; Molfetta, M.G.; Bruno, M.F.; Bruno, M.F.; Di Risio, M.; Damiani, L. Morphodynamic classification of sandy beaches in enclosed basins: The case study of Alimini (Italy). J. Coast. Res. 2011, 64, 180–184. [Google Scholar]
- Plant, N.; Holman, R.; Holland, K.T. cBathy: A robust algorithm for estimating nearshore bathymetry. J. Geophys. Res. C Oceans 2013, 118, 2595–2609. [Google Scholar]
- Paravolidakis, V.; Moirogiorgou, K.; Ragia, L.; Zervakis, M.; Synolakis, C. Coastline Extraction from Aerial Images based on Edge Detection. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-8, 153–158. [Google Scholar] [CrossRef]
- Hellenic Military Geographical Service. Available online: http://web.gys.gr (accessed on 30 April 2018).
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef]
- AquaPhoenix. Available online: http://www.aquaphoenix.com/lecture/matlab10/m/em_1dim.m (accessed on 8 July 2018).
- Ashman, K.M.; Bird, C.M.; Zepf, S.E. Detecting bimodality in astronomical datasets. Astron. J. 1994, 108, 2348–2361. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Wang, L.; He, L.; Mishra, A.; Li, C. Active contours driven by local Gaussian distribution fitting energy. Signal. Process. 2009, 89, 2435–2447. [Google Scholar] [CrossRef]
- Shemesh, M.; Ben-Shahar, O. Free boundary conditions active contours with applications for vision. In International Symposium on Visual Computing; Springer: Berlin/Heidelberg, Germany, 2011; pp. 180–191. [Google Scholar]
- Tide-Forecast. Available online: https://www.tide-forecast.com/locations/Rethimnon/tides/latest (accessed on 15 September 2018).













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paravolidakis, V.; Ragia, L.; Moirogiorgou, K.; Zervakis, M.E. Automatic Coastline Extraction Using Edge Detection and Optimization Procedures. Geosciences 2018, 8, 407. https://doi.org/10.3390/geosciences8110407
Paravolidakis V, Ragia L, Moirogiorgou K, Zervakis ME. Automatic Coastline Extraction Using Edge Detection and Optimization Procedures. Geosciences. 2018; 8(11):407. https://doi.org/10.3390/geosciences8110407
Chicago/Turabian StyleParavolidakis, Vasilis, Lemonia Ragia, Konstantia Moirogiorgou, and Michalis E. Zervakis. 2018. "Automatic Coastline Extraction Using Edge Detection and Optimization Procedures" Geosciences 8, no. 11: 407. https://doi.org/10.3390/geosciences8110407
APA StyleParavolidakis, V., Ragia, L., Moirogiorgou, K., & Zervakis, M. E. (2018). Automatic Coastline Extraction Using Edge Detection and Optimization Procedures. Geosciences, 8(11), 407. https://doi.org/10.3390/geosciences8110407