1. Introduction
Landscape units or land cover (LC) types encountered in the mesic regions of South Africa are diverse, comprising inter alia irrigation agriculture, dryland cultivation, extensive rangeland and forests, as well as low-density urban areas. Driven by critical water security issues in the country, noteworthy progress has been made towards establishing links between catchment health and especially the effects of invasive alien plants (IAPs) and the provision of hydrological services [
1,
2] within landscape units. While direct habitat destruction remains the primary threat to biodiversity, IAPs pose an increasing challenge both locally and globally [
3] and can adversely affect the primary productivity of the natural grasslands in South Africa used for livestock farming [
3,
4]. The reduction in biodiversity heightens ecosystem susceptibility to biological invasions that, in turn, erode ecosystem services [
5]. Landscape change, by IAPs and other land use approaches, may contribute to land degradation and the reduction of water and other available resources to native species and rural inhabitants [
1,
2,
3]. Therefore, one of the fundamental requirements necessary for evaluating the merit of any land use activity is the ability to accurately quantify ecosystem services associated with such activity [
6].
LC reflects the state of the landscape at a particular point in time [
7] arising from processes operating at the terrestrial surface representing elements determined both by natural conditions, as well as by human influence [
8]. LC change (LCC) involves alterations in biogeochemical cycles, climate and the hydrology of ecosystems [
9] from anthropogenic actions. LC dynamics have important consequences for natural resources as drivers of change in ecosystems and their services [
9,
10], and determining LCC can provide information about these processes [
7]. LCC analysis identifies the difference between LC categories in maps of different time points [
7,
11,
12] and draws conclusions about landscape conversion [
13,
14,
15]. The ability to quantify the rates and extents of LCC and develop models that relate changes in LC to underlying land use processes and environmental effects depends on accurate observations of landscape change [
7,
16]. LCC provides information about processes in the landscape and allows change trajectories to be identified relating to processes within the landscape [
7]. The occurrences and mechanisms of these LCC processes may be difficult to analyse due to a lack of empirical ecological and geospatial data correctly representing the variables driving these changes [
14]. Therefore, to ensure sustained landscape health, change analysis of landscape activities needs to be performed to enable the quantification of the derived benefits to humans occupying the catchment [
17].
Satellite-based Earth observation and geographic information systems (GIS) have been established as the best tools for observation, measurement and monitoring of LCC [
18,
19,
20]. Earth observation data provide large area coverage of features on the face of the Earth at near real time. The historical archive of such imagery provides multi-temporal monitoring capability and is therefore well suited to generate LC maps for change analysis. Useful information is derived from electromagnetic radiation reflected or emitted from the Earth’s surface captured in satellite images, by systematically employing image analysis [
21,
22]. Independent classification of remote sensing images from two or more different dates is the most common method of generating a multi-temporal series of maps for landscape pattern analysis [
23]. A traditional pixel-based or an object-based approach [
21] can be followed where classes or categories are assigned to each pixel (or object). Common image classification techniques include unsupervised and supervised classification. Various classification algorithms are available, with the most used algorithm being the maximum likelihood classifier (MLC) [
24]. However, traditional supervised classifiers are often outperformed by more elaborate classification methods, such as artificial neural networks, expert systems and decision trees (DT) [
25].
Accurately generating an LC map and quantifying the extent of a LC class or its change over time require careful selection of reference data for use in both training and validation [
26,
27,
28,
29]. The accuracy of training data will influence the success of the classification, while the validation data, assumed to be correct, are used to perform accuracy assessment [
28,
29].
When using LC data products created using differing input datasets, methodologies and legend categories, post-classification editing can be carried out when executing LCC analysis to improve classification accuracies and the correction of minor inconsistencies that would impede direct comparison [
30]. This is especially the case when using nationally-produced LC data products, such as are available in the United Kingdom [
31], the United States of America [
30] and South Africa [
19,
32]. If exact locations of map errors are known, LC maps can be rectified through post-classification editing to minimize error propagation prior to LCC analysis. However, error can be introduced during sampling if inaccurate LC classes are assigned or through misclassification during image analysis [
33,
34].
The accuracy of LCC modelling is directly dependent on the accuracy of the input LC data [
16,
19], and thus, classification errors in the independently-generated maps of LC derived using different methodologies are compounded in an LCC analysis, possibly leading to spurious results in landscape change [
16]. For any LCC analysis, the reliability of the LCC detected should therefore be assessed in order to explain the certainty with which the change can be considered real or spurious [
26,
31,
35,
36]. A single-date sample-based error matrix, often the endpoint of accuracy assessment prior to LCC analyses, provides insufficient information to assess the accuracy of gross change [
26,
35]. To address the errors introduced by comparison of erroneous input maps, Fuller et al. [
31] proposed a method to measure the level of change with 75% reliability as a function of the accuracy of each input LC map, the number of classes mapped and the percentage of change detected, while Pontius et al. [
33,
37] describe measures to determine the probability of error in predicted land change based on erroneous input maps.
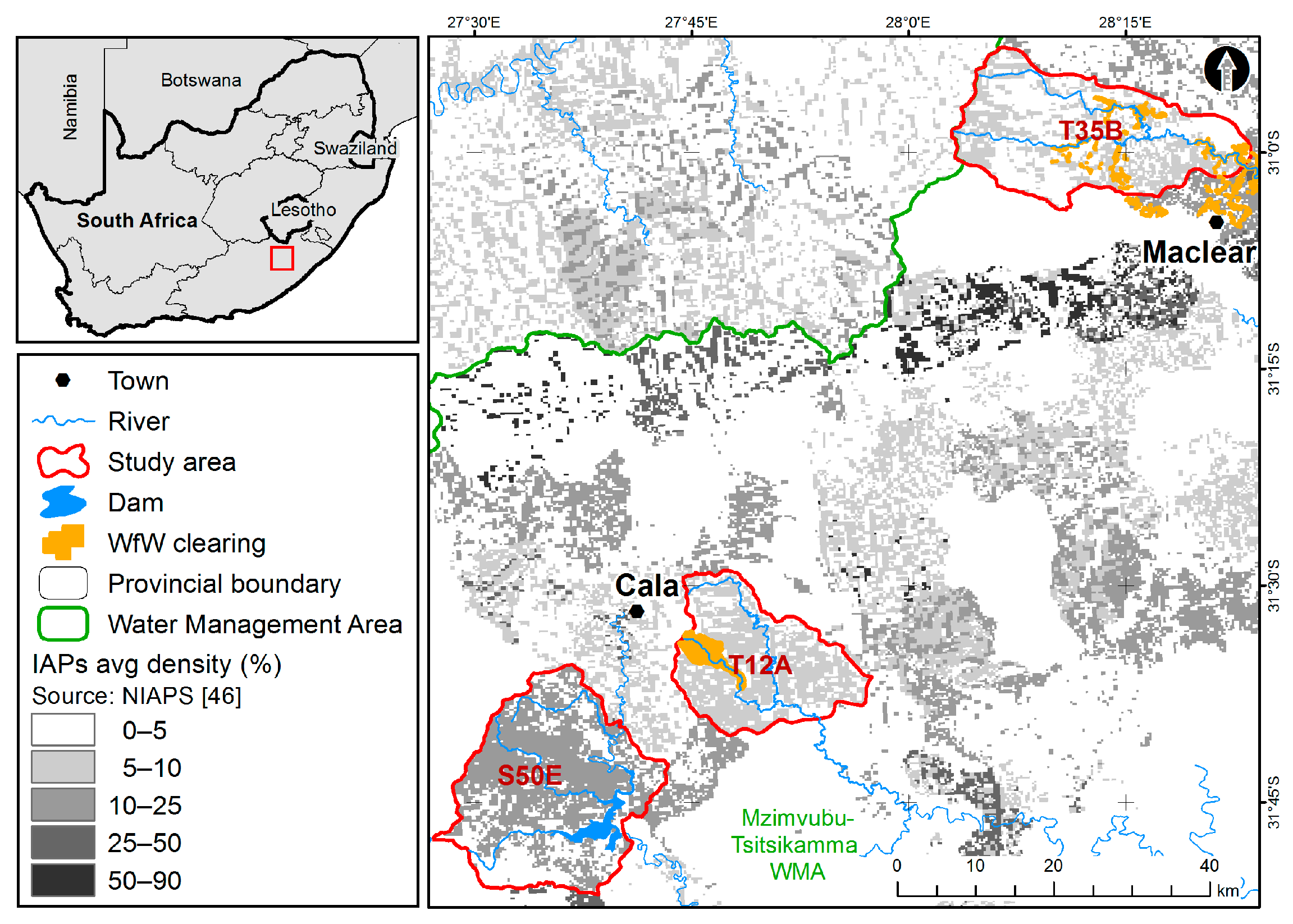
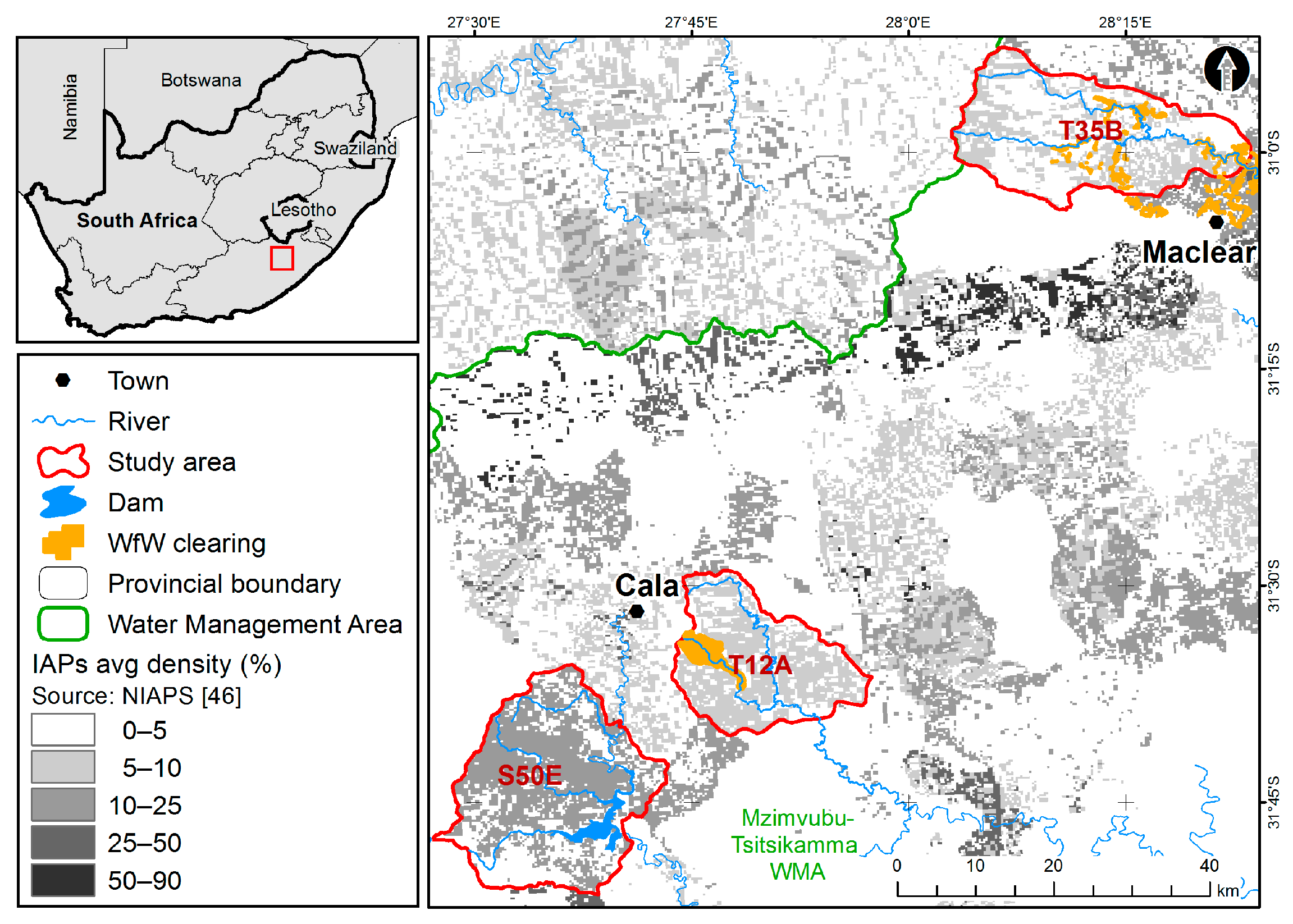
This paper describes the use of independent LC maps for change analysis in a grassland-dominated landscape in the Eastern Cape of South Africa to delineate LCC trajectories that are crucial to accurately quantify water and carbon fluxes. Invasion by woody plants is a driver of grassland transformation, which influences ecosystem services provided by rangelands, such as forage production, water supply, habitat, biodiversity, carbon sequestration and recreation [
38]. Therefore, from a rangeland management perspective, understanding the LC trajectories relating to grass production would be important for local farmers [
38]. In addition, the success of the Working for Water (WfW) programme [
2], which uses labour-intensive methods to clear invasive woody plants while supporting job creation [
3], can be evaluated. As IAPs are reported to have a high total incremental water use compared with indigenous vegetation [
39], clearing could salvage a significant proportion of water to maintain other ecosystem services [
40,
41].
The objectives of the paper include: (1) the post-classification editing and accuracy assessment of the existing national LC product [
32]; (2) deriving and validating a second LC map [
42] to facilitate change analysis; (3) performing LCC analysis on these datasets; and (4) delineating important LCC trajectories.
4. Discussion
This paper describes the challenges encountered while performing change analysis to determine landscape conversion dynamics between two time steps represented by two datasets derived using different methods. The original input dataset proposed for Time Step 1 (T1) proved unsatisfactory based on overall accuracy and was subsequently improved using manual methods. The T1 dataset was derived from a national level dataset frequently used for studies that require LC as input, such as the quantification of runoff and infiltration for a particular LC unit [
58]. Users often do not consider the low reported accuracy. As this dataset coincides with the availability of high temporal resolution MODIS data, it is frequently used as a starting point for area-based spatial analysis studies.
The dataset for Time Step 2 (T2) is the output of the object-based classification of Landsat 8 data. The OBIA approach was able to deal with the problem of the salt-and-pepper effect, common in classification outcomes using traditional per-pixel approaches [
21], while the rule-based expert system provided robust LC classifications for highly fragmented catchment landscapes and precision in delineating boundaries of the various vegetation types despite the coarser Landsat 8 resolution [
21,
86]. The overall accuracy for this LC dataset (T2) using single-date imagery was deemed acceptable based on the overall accuracy value of greater than 85% ± 1% when compared to reference points (
Table 7) expressed as the estimated percent of area (the population). Sufficient ground truth data are required for definite mapping of alien plants and other cover classes.
As LC classification is fraught with uncertainty, it is important to accurately report on the uncertainty inherent in data created through spatial modelling [
26,
35], which starts with an effective sampling design of ground truth data [
35]. Estimates of overall accuracy, user’s accuracy and producer’s accuracy based on the population [
83] can be reported. A confidence interval can be computed, to describe the uncertainty of the sample-based estimates. In addition, the construction of a meaningful LC legend through categorical aggregation in a manner that gives insights concerning categorical change over time [
62] that can accommodate these wooded classes must be investigated. However, it must be noted that category aggregation may decrease the error in the individual LC maps, as well as the difference between LC maps at T1 and T2 [
87].
LCC detection was performed using a transition matrix to compare the categorical LC maps from the two time steps. The method (D) assumes that the probability of error in the two independently-classified maps (T1 and T2) is randomly distributed, which is unlikely, as error is affected by autocorrelation [
37]. Upper (U), middle (M) and lower bounds of LCC were also reported. Method U assumes that error only exists where LC maps match; therefore, more error is associated with higher estimated change, up to 42% in this study area. Simulated errors cause a shift of values from the diagonal to the off-diagonal entries of the transition matrix [
33]. In contrast, method L considers that error exists only in areas of change, therefore more error with less estimated change [
33]. As some classes are easier to classify than others, and such regions are frequently clustered [
84]; the error may exhibit spatial autocorrelation. This would cause large homogenous classes, such as UG, to exhibit small errors compared to fragmented small classes, such as woody outcrops with many edges around small patches. This is clear from the high producer’s accuracy for the UG class (
Table 5 and
Table 7) and low producer’s accuracy for FITBs. Error may also be temporally autocorrelated, such as classes on flat slopes that persist over time, which may be easier to classify [
37]. Future studies should therefore consider investigating the spatial and temporal correlation of error within the input LC maps prior to LCC analysis, to reduce errorpropagation [
34,
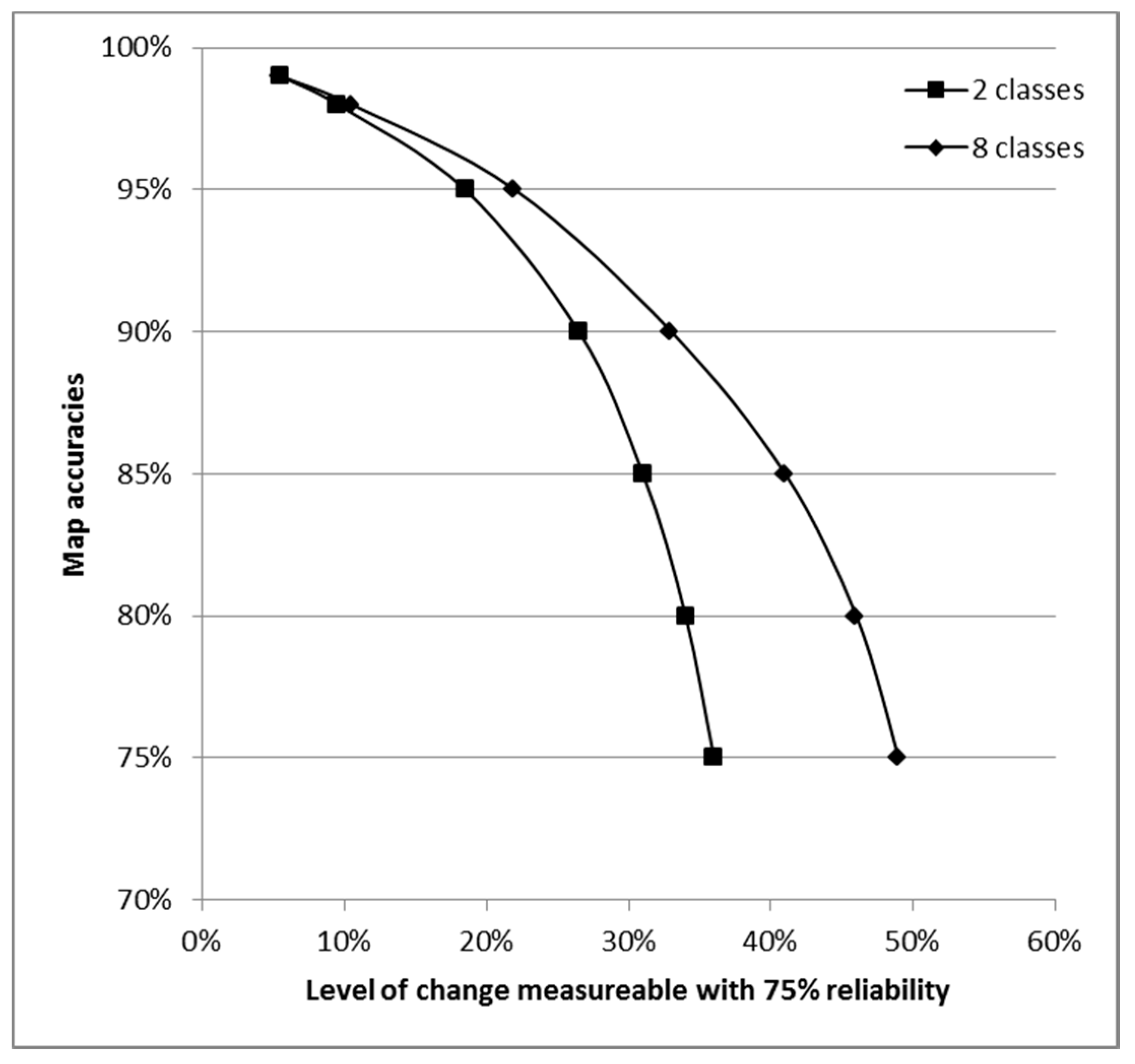
88]. The accuracy for the LCC map was derived from the overall accuracies of the individual LC maps (84% and 85%, respectively) resulting in a low overall accuracy of 71%. From
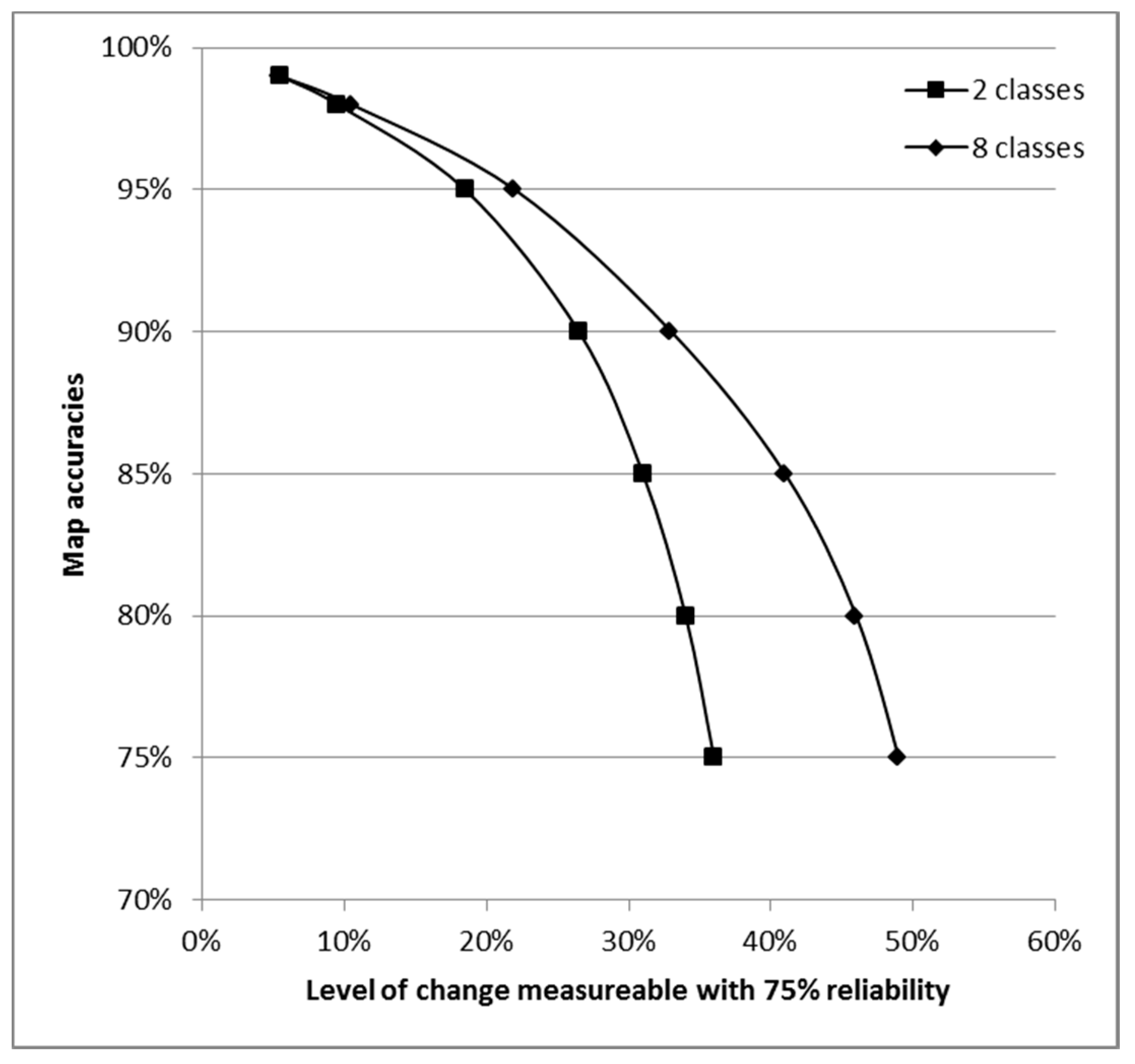
Figure 3, the level of change that can be recorded with 75% reliability on maps with 2, 3, 10 and 30 classes with a particular accuracy can be determined [
31]. To map a change such as 19% (
Table 8), input LC maps would need to be about 96% accurate, assuming 75% reliability. Should greater reliability be required, map accuracies need to approximate 99% [
89], which has become the operational requirement. Theoretical accuracy of greater than 70% was achieved for the LCC maps for the southern catchments (T12A and S50E) with T35B showing greater uncertainty at 67%. Individual classes BRS and Wl displayed low producer’s accuracies, which caused conversion trajectories involving these classes to be flagged as exceptionality and excluded from the trajectory analysis.
This study used a framework for change analysis [
7,
13,
85] based on change trajectories derived from LC labels (
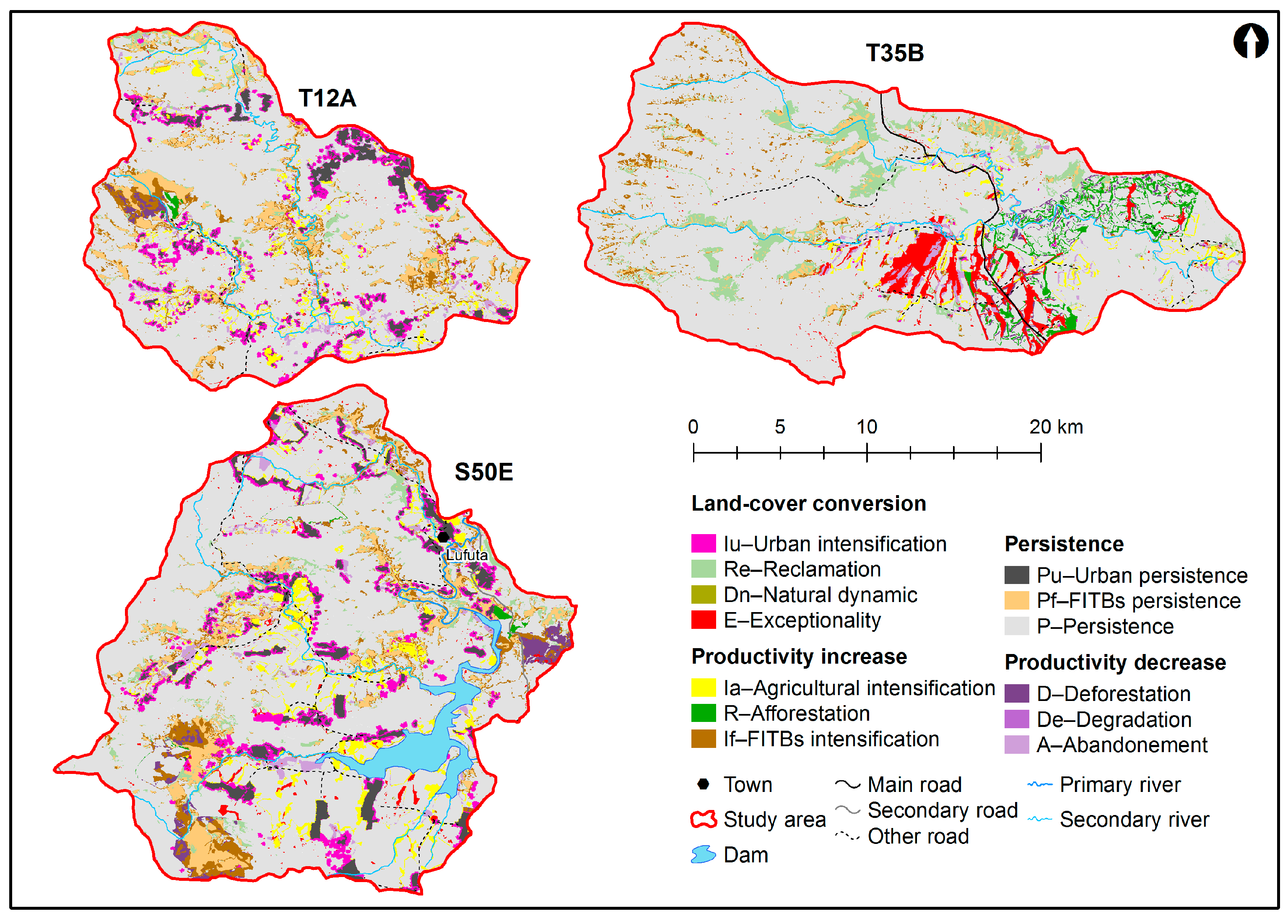
Table 3) categorizing combinations of LCC into seven main flows or trajectories. When this framework was applied to the LCC maps, the persistence of LC classes (>70% from
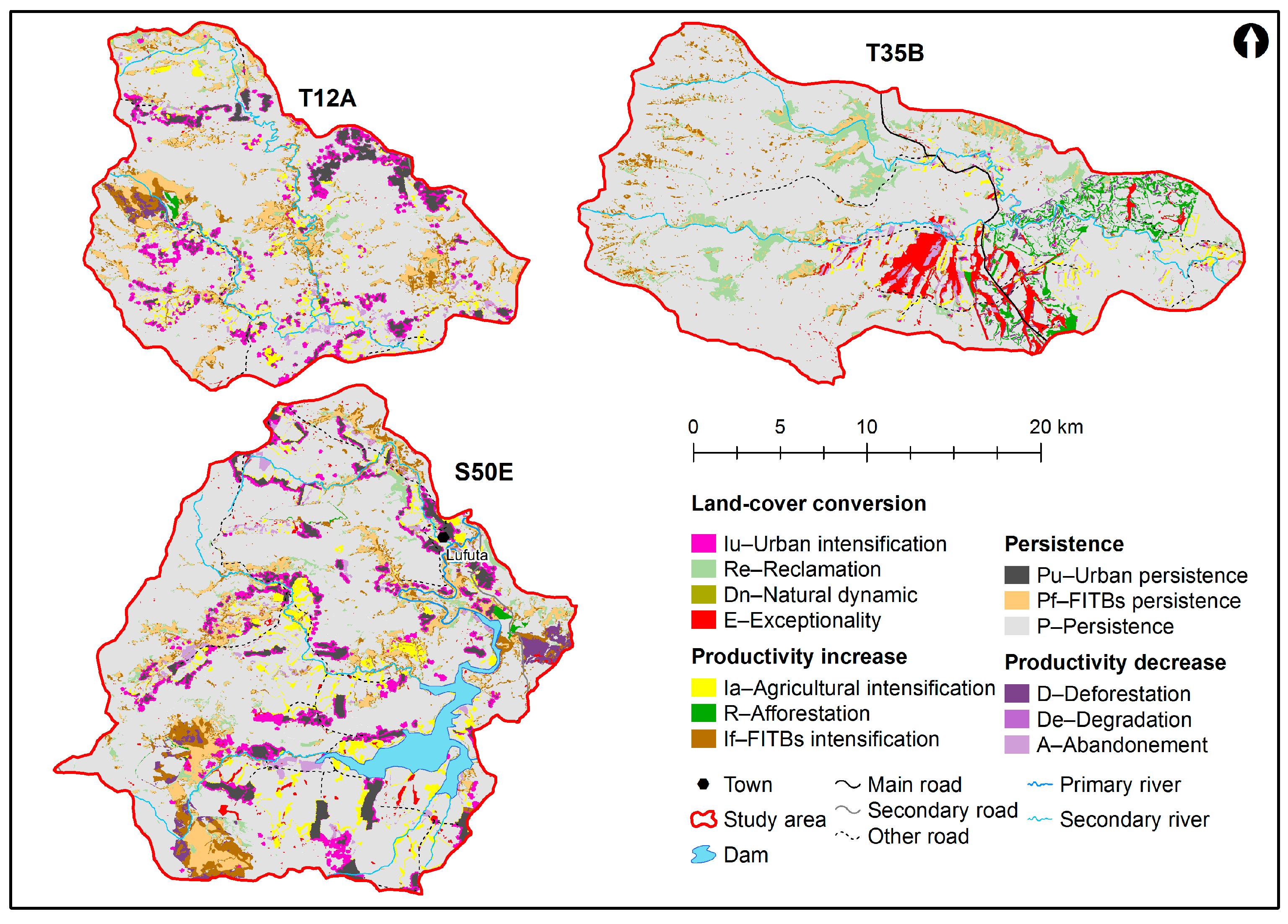
Table 10) was noted with grassland remaining the majority cover in the three catchments. Both urban persistence (Pu) and FITB persistence (Pf) are clearly visible in catchments T12A and S50E (
Figure 4) with the expansion of urban areas (Iu, urban intensification) in these two southern catchments predominantly at the expense of grassland (UG) and agriculture (CLs), demonstrating the natural development of urban areas. Urban intensification is also highest in these catchments where subsistence farming is practiced. This apparent intensification may possibly be attributed to the T1 dataset classification strategy, which focused on identifying formal townships and failed to delineate traditional villages practicing subsistence farming, as encountered in these areas. Accordingly, agricultural activities intensified (Ia) by four percent in S50E, attributed to conversion from grassland (UG) when no error is considered, but up to 2% loss when possible error in all pixels is considered (M), associated with low user’s and producer’s accuracies for CLs in LC classification.
Considering that the class FITBs contains indigenous forest, thicket, bushland, bush clumps, high fynbos and alien plants that are spectrally similar and could not be separated using Landsat imagery, it is not surprising that T12A, with persistent remnants of indigenous forest, has the highest percentage of the class FITB persistence (Pf). The high persistence of FITBs (Pf) in S50E is likely attributed to the presence of
Pinus spp. [
43] on the southwest of the catchment. Interestingly, despite T12A being a focus target for Working for Water (WfW) with the aim of eradicating alien trees in these catchments, there is still a prominent presence. In both the T1 and T2 datasets, the low producer’s accuracy for FITBs highlights the uncertainty associated with this transition. In order to provide a better distinction between different wooded classes, higher spatial resolution data need to be considered to distinguish between spectrally-homogenous vegetation types [
72].
Since scientists want to identify the dominant signals of land change, the varying dynamics between the three catchments must be noted. Accounting for approximately four percent of the study extent, agricultural intensification (Ia) and afforestation (R) can be regarded as an increase in the productivity of the landscape, with land use intensification associated with a productivity-driven landscape. Conversely, the persistence and intensification of FITBs (Pf + If) may be regarded as a degradation gradient existing in the landscape, when IAPs included in the FITBs class affect biodiversity and ecosystem services. T12A and S50E have similar trajectories of this degradation gradients (Pf + If), which may reflect real change or be an artefact of the classification and LCC detection. After persistence, this is the strongest conversion trajectory within these two catchments. It can be postulated that the FITB persistence and intensification noticeable in T12A and S50E may be attributed to IAPs, known to affect grassland veld types [
45].
The context of reclamation (Re) in this study designates the potential extent of anthropogenic rehabilitation, where areas classified as FITBs (invaded by IAPs and other woody vegetation) have been replaced with grassland and bare rocks. Despite reported WfW activity, reclamation (Re) in T12A and S50E was less than three percent. In T35B, six percent of FITBs have been returned to grassland, an area of almost 2400 ha. This however may be an artefact associated with the low accuracy of the LCC map for T35B (
Table S3). Spatial analyses of the locational factors, which may be driving the LCC trajectories [
36,
89,
90,
91], are envisaged for future research.
5. Conclusions
This paper has described the use of independent LC maps for change analysis in a grassland-dominated landscape for three catchments in the Eastern Cape of South Africa. Land cover maps were derived from existing national LC dataset data (2000-T1) and through object-based image analysis (2014-T2) of Landsat 8 imagery. A revised LC legend comprising eight classes was developed aggregating detailed classes under a number of conceptually broader classes to create a common LC scheme in the interest of comparing compatible classes between LC datasets T1 and T2.
Accuracy assessment of the independently-created LC maps revealed the overall accuracies to be 83.7% and 85.4% for T1 and T2, respectively. The theoretical accuracy of the resulting LCC maps, ranged between a low 67% for T35B to 72% for S50E and 76% for T12A (
Table S3) with a hypothetical error in landscape transition of up to 30% based on error propagation from contributing LC maps. Land use patterns in all three catchments are characterized by persistence with more than 70% of the total area showing no change. However, despite the high accuracies for the independently-mapped LC at T1 and T2, 37% of the combined map area would record differences of which ~19% would be real change and ~19% would have arisen through errors. Through substantial over-estimation of areas’ change, 96% of all change could be mapped.
The LCC analysis has revealed an increase of agricultural intensification, urbanization and infrastructural development across the three catchments over the 15-year period. LC class FITBs in the guise of natural vegetation or alien plants have persisted and intensified chiefly at the periphery of river channels, as well as around agricultural areas and human inhabited regions. While some LC classes, such as grassland and water bodies, have maintained approximate states of persistence, land degradation resulting from land use intensification and FITBs (possibly IAPs) infestations has been identified.
LC classification is fraught with uncertainty; thus, accurate reporting on this inherent uncertainty is needed if water and carbon fluxes are to be properly understood and quantified, especially where future scenarios may be considered. In this study area, it was revealed that at the current level of change, for 75% reliability of results, an overall accuracy of LC maps of 96% would be required. Should higher reliability of change results be required for operational purposes, accuracies of 99% for each independently mapped LC dataset would be required. Achieving these levels of accuracies at Landsat resolution is unlikely, and thus, some uncertainty in both the classification results and the change results must be accepted.
Landscape units associated with clearly identified persistent or degradation trajectories can be used in future studies to characterize water use and carbon fluxes for sustained landscape health from remote sensing products allowing models of ecosystem stress to be developed. The challenge remains to determine significant signals in the landscape that are not artefacts of the underlying input data, different classification schemes and aggregation methods, the experience of classifiers or the scale of analysis. Through systematic analysis of changes and accurate reporting of uncertainty, this can be addressed to produce output that authentically reflects the landscape dynamics in order to accurately quantify the effect of landscape transitions on the ecosystems services in the catchments.





{kind=link}
{kind=link}
{kind=link}
{kind=link}