Identifying Trawl Marks in North Sea Sediments

 , , , and
, , , and
Abstract
1. Introduction
- Point out spatial patterns of TM specifically for each study site.
- Connect those patterns with the fishing behavior (trawling gears, fishing season).
- Estimate the impact (intensity and persistence) of fishing activities on the sea floor.
- Investigate the role of specific factors (sediment type, water depth related wave impact) in the generation and degradation of TM.
2. Materials and Methods
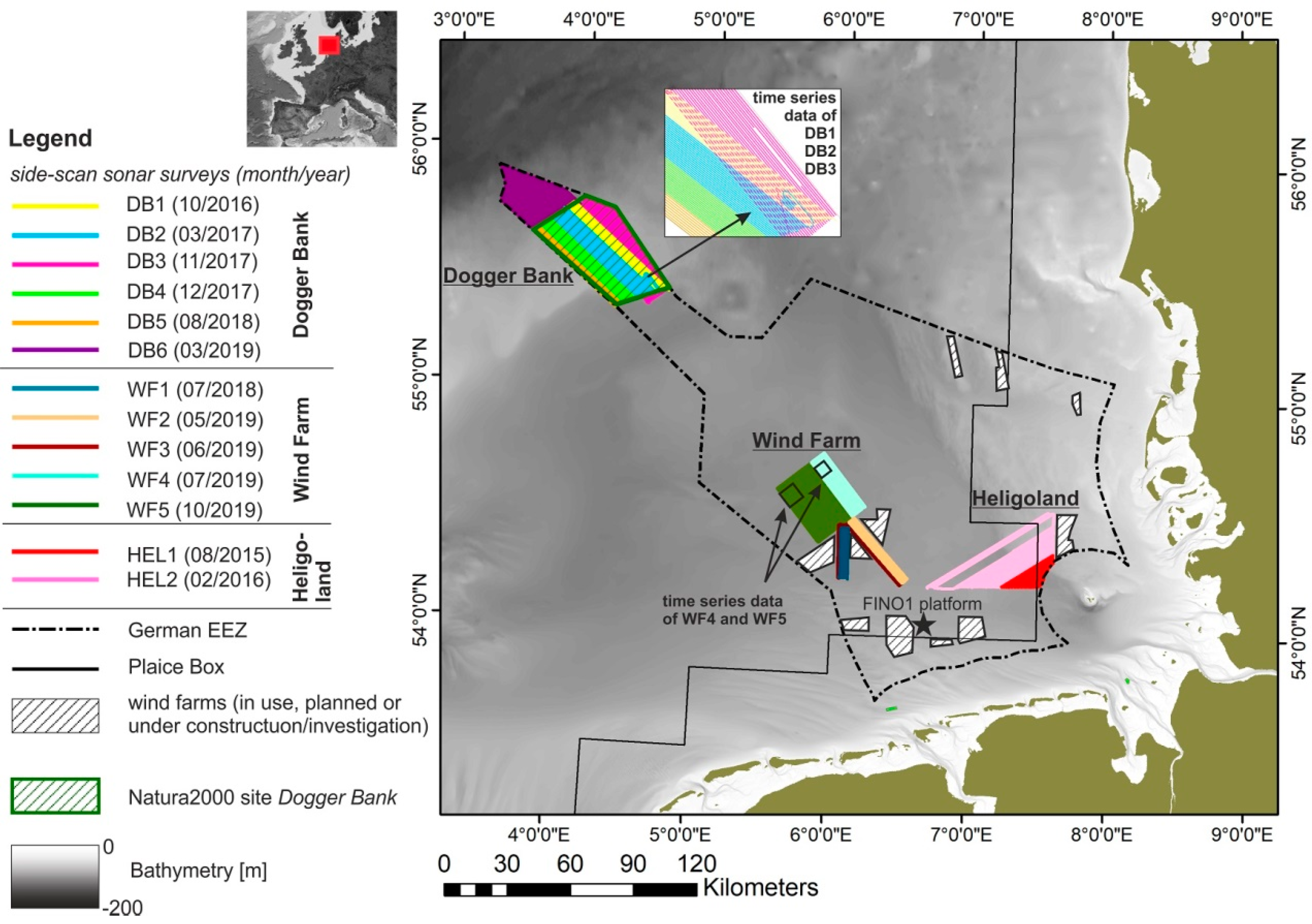
2.1. Study Sites and Physical Settings
2.1.1. Study Site “Dogger Bank” (DB)
2.1.2. Study Site “Wind Farm” (WF)
2.1.3. Study Site “Heligoland” (HEL)
2.1.4. Bottom Contacting Trawling in the German EEZ, North Sea
2.2. Data Acquisition and Processing
2.2.1. General Survey Information
2.2.2. Grain Size Analysis and Under-Water (UW) Video Recordings
2.2.3. Side-Scan Sonar (SSS) Data Acquisition and Processing
- slant-range correction
- empirical gain normalization (in order to correct over- and under-amplified areas)
- de-stripe filter (in order to remove artifacts due to tow-fish movements)
- layback correction (in order to ensure precise positioning within the mosaic)
2.2.4. Multibeam Echo Sounder (MBES) Data Acquisition and Processing
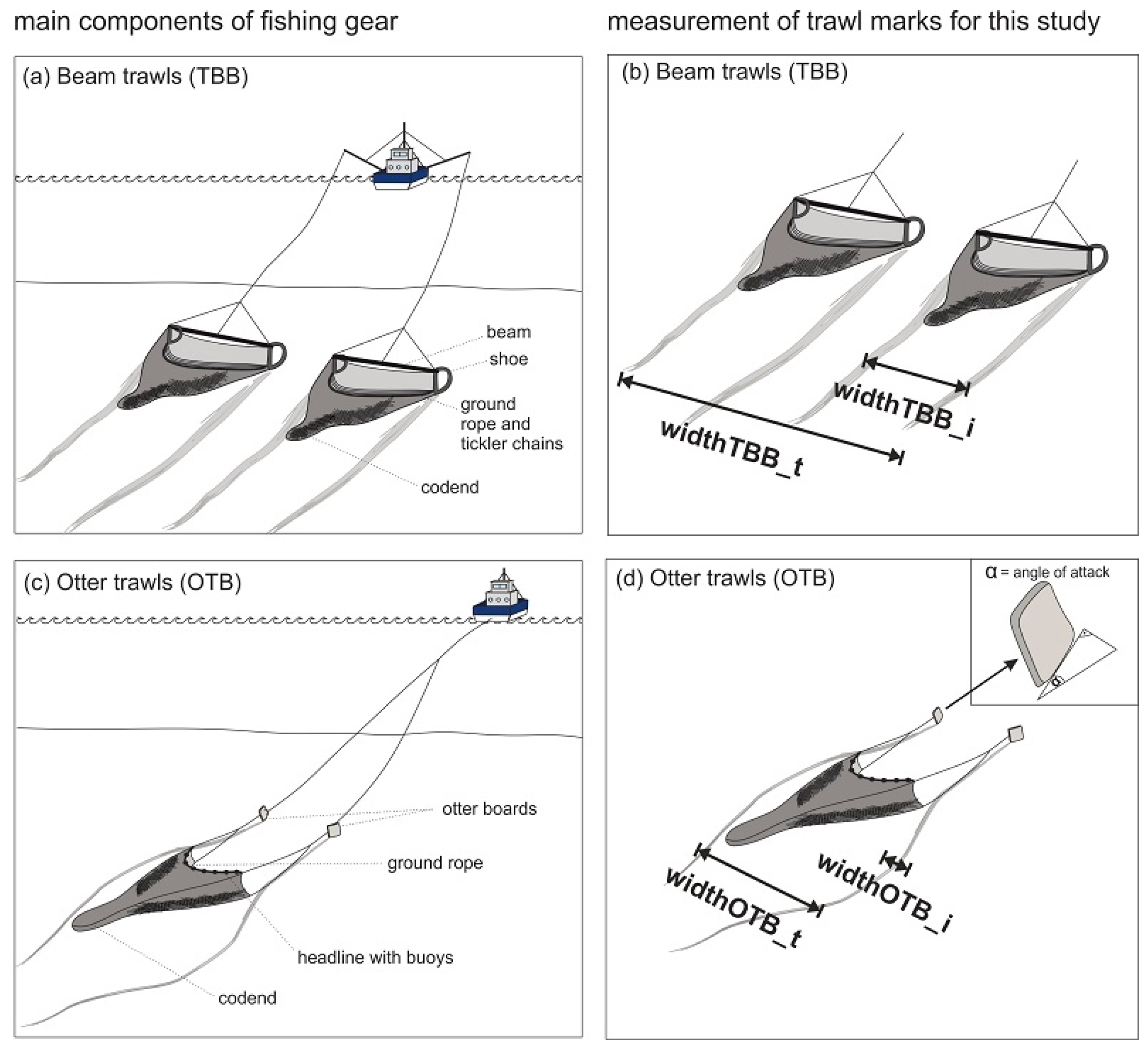
2.2.5. Trawl Mark Mapping
- width of individual TBB mark was measured (widthTBB_i)
- total distance from starboard to portside TBB (widthTBB_t)
- distance between the otter boards (door spread, widthOTB_t)
- width of the marks created by the otter doors (widthOTB_i)
2.2.6. Observation of Fishing Vessels
- DB1: observation of a single vessel, re-survey after five months (DB2)
- WF4: observation of a single vessel starting a new haul, re-survey after 36 h
- WF5: observation of multiple vessels, re-survey after six days including three days of rough sea conditions (significant wave height approx. 4 m)
3. Results
3.1. Sediment Types—Grain size and UW-Video Analysis
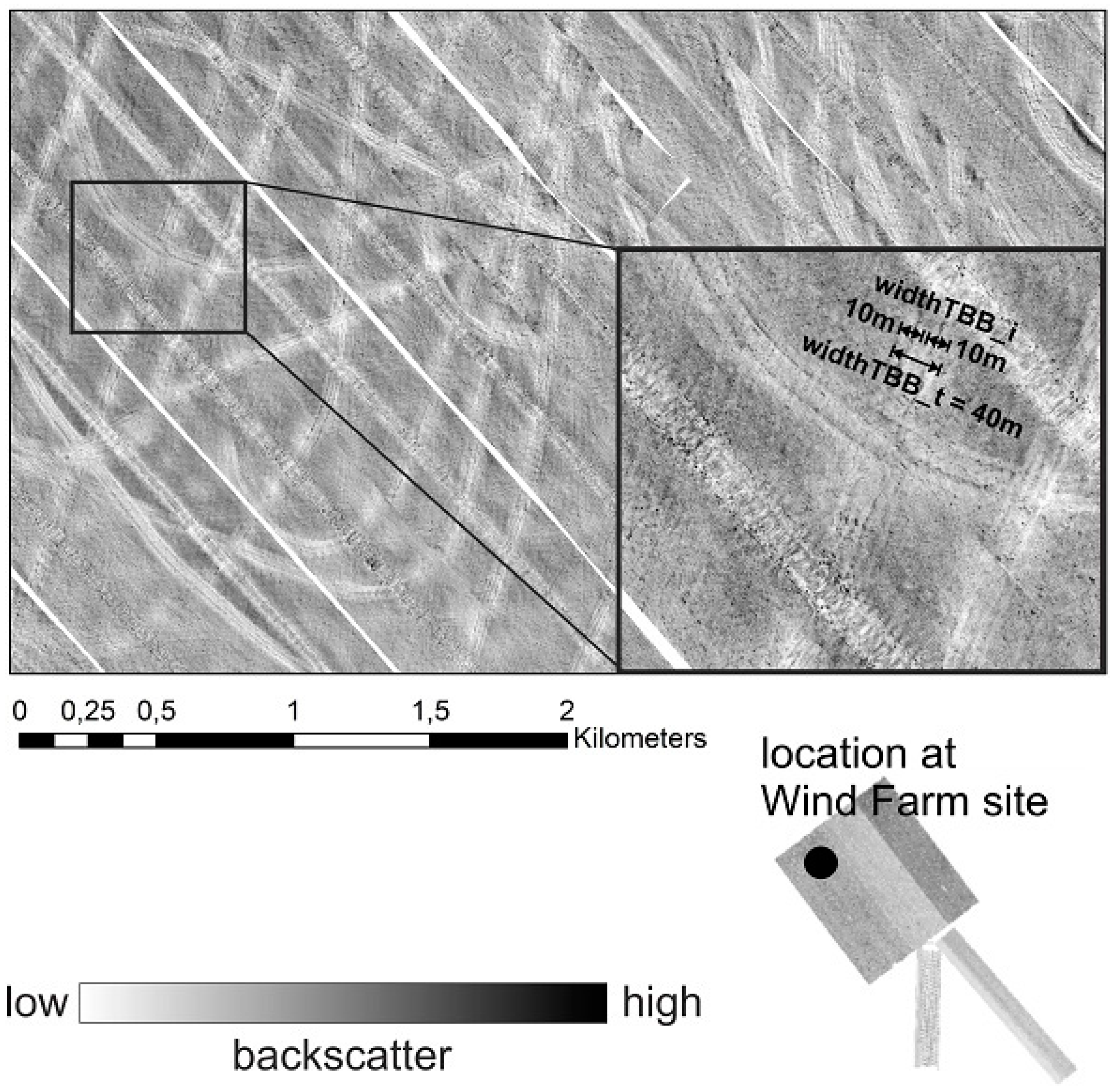
3.2. Acoustic Signature of Trawl Marks
3.3. Trawl Mark Geometry and Morphology
3.4. General Trawl Mark Mapping
3.5. Trawl Mark Preservation and Potential Signs of Degradation
4. Discussion
4.1. Acoustic Signature of Trawl Marks
4.2. Trawl Mark Geometry and Morphology
4.3. Persistence of Trawl Marks and Signs of Degradation
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stelzenmüller, V.; Fock, H.O.; Gimpel, A.; Rambo, H.; Diekmann, R.; Probst, W.N.; Callies, U.; Bockelmann, F.; Neumann, H.; Kröncke, I. Quantitative environmental risk assessments in the context of marine spatial management: Current approaches and some perspectives. ICES J. Mar. Sci. 2015, 72, 21. [Google Scholar] [CrossRef]
- BSH. Flächenentwicklungsplan 2019 für die deutsche Nord- und Ostsee; Bundesamt für Seeschifffahrt und Hydrographie Hamburg und Rostock: Hamburg/Rostock, Germany, 2019; p. 216. [Google Scholar]
- Oberle, F.K.J.; Storlazzi, C.D.; Hanebuth, T.J.J. What a drag: Quantifying the global impact of chronic bottom trawling on continental shelf sediment. J. Mar. Syst. 2016, 159, 11. [Google Scholar] [CrossRef]
- Amoroso, R.O.; Pitcher, C.R.; Rijnsdorp, A.D.; McConnaughey, R.A.; Parma, A.M.; Suuronen, P.; Eigaard, O.R.; Bastardie, F.; Hintzen, N.T.; Althaus, F.; et al. Bottom trawl fishing footprints on the world’s continental shelves. Proc. Natl. Acad. Sci. USA 2018, 115, E10275–E10282. [Google Scholar] [CrossRef] [PubMed]
- Lindeboom, H.J.; de Groot, S.J. The Effects of Different Types of Fisheries on the North Sea and Irish Sea Benthic Ecosystem; NIOZ-Rapport 1998-1; RIVO-DLO REPORT C003/98; Netherlands Institute for Sea Research (NOIZ): Texel, The Netherlands; Netherlands Institute for Fisheries Research (RIVO-DLO): Ijmuiden, The Netherlands, 1998; p. 412. [Google Scholar]
- Kaiser, M.J.; Spencer, B.E. The Effects of Beam-Trawl Disturbance on Infaunal Communities in Different Habitats. J. Anim. Ecol. 1996, 65, 11. [Google Scholar] [CrossRef]
- Depestele, J.; Ivanović, A.; Degrendele, K.; Esmaeili, M.; Polet, H.; Roche, M.; Summerbell, K.; Teal, L.R.; Vanelslander, B.; O’Neill, F.G.O. Measuring and assessing the physical impact of beam trawling. ICES J. Mar. Sci. 2016, 73, 12. [Google Scholar] [CrossRef]
- Commission of the European Communities. Communication from the Commission to the Council and the European Parliament—Review of Certain Access Restrictions in the Common Fisheries Policy (Shetland Box and Plaice Box); 52005DC0422; Commission of the European Communities: Brussels, Belgium, 2005. [Google Scholar]
- Van der Molen, J.; Aldridge, J.N.; Coughlan, C.; Parker, E.R.; Stephens, D.; Ruardij, P. Modelling marine ecosystem response to climate change and trawling in the North Sea. Biogeochemistry 2013, 113, 213–236. [Google Scholar] [CrossRef]
- Coughlan, M.; Wheeler, A.J.; Dorschel, B.; Lordan, C.; Boer, W.; Gaever, P.v.; Haas, H.d.; Mörz, T. Record of anthropogenic impact on the Western Irish Sea mud belt. Anthropocene 2015, 9, 56–69. [Google Scholar] [CrossRef]
- Palanques, A.; Puig, P.; Guillén, J.; Demestre, M.; Martín, J. Effects of bottom trawling on the Ebro continental shelf sedimentary system (NW Mediterranean). Cont. Shelf Res. 2014, 72, 15. [Google Scholar] [CrossRef]
- Hiddink, J.G.; Jennings, S.; Sciberras, M.; Szostek, C.L.; Hughes, K.M.; Ellis, N.; Rijnsdorp, A.D.; McConnaughey, R.A.; Mazor, T.; Hilborn, R.; et al. Global analysis of depletion and recovery of seabed biota after bottom trawling disturbance. Proc. Natl. Acad. Sci. USA 2017, 114, 6. [Google Scholar] [CrossRef]
- Werner, F.; Hoffmann, G.; Bernhard, M.; Milkert, D.; Vikgren, K. Sedimentologische Auswirkungen der Grundfischerei in der Kieler Bucht (Westliche Ostsee). Meyniana 1990, 42, 29. [Google Scholar]
- Friedlander, A.M.; Boehlert, G.W.; Field, M.E.; Mason, J.E.; Gardner, J.V.; Dartnell, P. Sidescan-sonar mapping of benthic trawl marks on the shelf and slope off Eureka, California. Fish. Bull. 1999, 97, 15. [Google Scholar]
- Smith, C.J.; Banks, A.C.; Papadopoulou, K.-N. Improving the quantitative estimation of trawling impacts from sidescan-sonar and underwater-video imagery. ICES J. Mar. Sci. 2007, 64, 9. [Google Scholar] [CrossRef]
- Mérillet, L.; Kopp, D.; Robert, M.; Salaün, M.; Méhault, S.; Bourillet, J.-F.; Mochet, M. Are trawl marks a good indicator of trawling pressure in muddy sand fishing grounds? Ecol. Indic. 2018, 85, 5. [Google Scholar] [CrossRef]
- Gourina, C.; Fakiris, E.; Geraga, M.; Williams, D.P.; Papatheodorou, G. Automatic Detection of Trawl-Marks in Sidescan Sonar Images through Spatial Domain Filtering, Employing Haar-Like Features and Morphological Operations. Geosciences 2019, 9, 214. [Google Scholar] [CrossRef]
- Gilkinson, K.; King, E.L.; Li, M.Z.; Roddick, D.; Kenchington, E.; Han, G. Processes of physical change to the seabed and bivalve recruitment over a10-year period following experimental hydraulic clam dredging on Banquereau, Scotian Shelf. Cont. Shelf Res. 2015, 92, 15. [Google Scholar] [CrossRef]
- Krost, P.; Bernhard, M.; Werner, F.; Hukriede, W. Otter trawl tracks in Kiel Bay (Western Baltic) mapped by side-scan sonar. Meeresforschung 1990, 32, 10. [Google Scholar]
- DeAlteris, J.; Skrobe, L.; Lipsky, C. The Significance of Seabed Disturbance by Mobile Fishing Gear Relative to Natural Processes: A Case Study in Narragansett Bay, Rhode Island. Am. Fish. Soc. Symp. 1999, 22, 15. [Google Scholar]
- Eigaard, O.R.; Bastardie, F.; Breen, M.; Dinesen, G.E.; Hintzen, N.T.; Laffargue, P.; Mortensen, L.O.; Rasmus Nielsen, J.; Nielsson, H.C.; O’Neill, F.G.; et al. Estimating seabed pressure from demersal trawls, seines, and dredges based on gear design and dimensions. ICES J. Mar. Sci. 2016, 73, 17. [Google Scholar] [CrossRef]
- Schulze, T. International Fishing Activities (2012–2016) in German Waters in Relation to the Designated Natura 2000 Areas and Proposed Management Within; Johann Heinrich von Thünen-Institute Federal Research Institute for Rural Areas, Forestry and Fisheries Institute of Sea Fisheries: Hamburg, Germany, 2018. [Google Scholar]
- Pedersen, S.A.; Fock, H.; Krause, J.; Pusch, C.; Sell, A.L.; Böttcher, U.; Rogers, S.I.; Sköld, M.; Skov, H.; Podolska, M.; et al. Natura 2000 sites and fisheries in German offshore waters. ICES J. Mar. Sci. 2009, 66, 155–169. [Google Scholar] [CrossRef]
- Sala, A.; Notti, E.; Bonanomi, S.; Pulcinella, J.; Colombelli, A. Trawling in the Mediterranean: An Exploration of Empirical Relations Connecting Fishing Gears, Otterboards and Propulsive Characteristics of Fishing Vessels. Front. Mar. Sci. 2019, 6. [Google Scholar] [CrossRef]
- Malik, M.A.; Mayer, L.A. Investigation of seabed fishing impacts on benthic structureusing multi-beam sonar, sidescan sonar, and video. ICES J. Mar. Sci. 2007, 64, 13. [Google Scholar] [CrossRef]
- Lucieer, V. Object—Oriented classification of sidescan sonar data for mapping benthic marine habitats. Int. J. Remote Sens. 2008, 29, 17. [Google Scholar] [CrossRef]
- Blondel, P. The Handbook of Side-Scan Sonar; Springer: Berlin/Heidelberg, Germany, 2009; p. 344. [Google Scholar]
- BSH. Guideline for Seafloor Mapping in German Marine Waters Using High-Resolution Sonars; Federal Maritime and Hydrographic Agency: Hamburg, Germany, 2016; p. 147. [Google Scholar]
- Holler, P.; Markert, E.; Bartholomä, A.; Capperucci, R.M.; Hass, H.C.; Kröncke, I.; Mielck, F.; Reimers, H.C. Tools to evaluate seafloor integrity: Comparison of multi-device acoustic seafloor classifications for benthic macrofauna-driven patterns in the German Bight, southern North Sea. Geo-Mar. Lett. 2017, 37, 17. [Google Scholar] [CrossRef]
- EMODnet-Bathymetry-Consortium. EMODnet Digital Bathymetry (DTM). 2018. Available online: https://www.emodnet-bathymetry.eu/ (accessed on 22 October 2020).
- GEBCO-Compilation-Group. GEBCO 2020 Grid; British Oceanographic Data Centre, National Oceanography Centre, NERC: Liverpool, UK, 2020. [Google Scholar] [CrossRef]
- Zeiler, M.; Schwarzer, K.; Bartholomä, A.; Ricklefs, K. Seabed Morphology and Sediment Dynamics. Die Küste 2008, 74, 13. [Google Scholar]
- Schwarzer, K.R.K.; Bartholomä, A.; Zeiler, M. Geological Development of the North Sea ans the Baltic Sea. Die Küste 2008, 74, 15. [Google Scholar]
- Schwarzer, K.; Diesing, M. Identification of submarine hard-bottom substrates in the German North Sea and Baltic Sea EEZ with high-resolution acoustic seafloor imaging. In Progress in Marine Conservation in Europe; Springer: Berlin/Heidelberg, Germany, 2006; pp. 111–125. [Google Scholar] [CrossRef]
- Aldridge, J.N.; Parker, E.R.; Bricheno, L.M.; Green, S.L.; van der Mole, J. Assessment of the physical disturbance of the northern European Continental shelf seabed by waves and currents. Cont. Shelf Res. 2015, 108, 20. [Google Scholar] [CrossRef]
- Stanev, E.V.; Dobrynin, M.; Pleskachevsky, A.; Grayek, S.; Günther, H. Bed shear stress in the southern North Sea as an important driver for suspended sediment dynamics. Ocean Dyn. 2009, 59, 12. [Google Scholar] [CrossRef]
- Sündermann, J.; Pohlmann, T. A brief analysis of North Sea physics. Oceanologia 2011, 53, 27. [Google Scholar] [CrossRef]
- Fitch, S.; Thomson, K.; Gaffney, V. Late Pleistocene and Holocene depositional systems and the palaeogeography of the Dogger Bank, North Sea. Quat. Res. 2005, 64, 185–196. [Google Scholar] [CrossRef]
- Laurer, W.-U.; Naumann, M.; Zeiler, M. Erstellung der Karte zur Sedimentverteilung auf dem Mee-resboden in der deutschen Nordsee nach der Klassifikationvon FIGGE (1981). Geopotenzial Dtsch. Nordsee, Modul B Dok. 2014, 1, 1–19. [Google Scholar]
- Papenmeier, S.; Hass, H.C.; Propp, C.; Thiesen, M.; Zeiler, M. Verteilung der Sedimenttypen auf dem Meeresboden in der deutschen AWZ (1:10.000). 2019. Available online: www.geoseaportal.de (accessed on 14 October 2020).
- Holler, P.; Bartholomä, A.; Propp, C.; Thiesen, M.; Zeiler, M. Verteilung der Sedimenttypen auf dem Meeresboden in der deutschen AWZ (1:10.000). 2019. Available online: www.geoseaportal.de (accessed on 14 October 2020).
- Neumann, H.; Diekmann, R.; Emeis, K.-C.; Kleeberg, U.; Moll, A.; Kröncke, I. Full-coverage spatial distribution of epibenthic communities in the south-eastern North Sea in relation to habitat characteristics and fishing effort. Mar. Environ. Res. 2017, 130, 11. [Google Scholar] [CrossRef] [PubMed]
- Bildstein, T.; Schuchardt, B.; Kramer, M.; Bleich, S.; Schückel, S.; Huber, A.; Dierschke, V.; Koschinski, S.; Garnie, A. Die Meeresschutzgebiete in der deutschen ausschließlichenWirtschaftszone der Nordsee—Beschreibung und Zustandsbewertung; Bundesamt für Naturschutz: Bonn, Germant, 2017; p. 550. [Google Scholar] [CrossRef]
- STECF. Review of Joint Recommendations for Natura 2000 Sites at Dogger Bank, Cleaver Bank, Frisian Front and Central Oyster Grounds (STECF-19-04); Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- ICES. OSPAR Request 2018 for Spatial Data Layers of Fishing Intensity/Pressure; ICES: Copenhagen, Denmark, 2018. [Google Scholar] [CrossRef]
- Methratta, E.T.; Dardick, W.R. Meta-Analysis of Finfish Abundance at Offshore Wind Farms. Rev. Fish. Sci. Aquac. 2019, 27, 19. [Google Scholar] [CrossRef]
- Brezina, J. Particle size and settling rate distributions of sand-sized materials. In Proceedings of the PARTEC 79, 2nd European Symposium on Particle Characterisation, Nürnberg, Germany, 24–26 September 1979. [Google Scholar]
- Stein, R. Rapid grain-size analyses of clay and silt fraction by SediGraph 5000D: Comparison with Coulter Counter and Atterberg methods. J. Sediment. Petrol. 1985, 55, 4. [Google Scholar] [CrossRef]
- Cramp, A.; Lee, S.V.; Herniman, J.; Hiscott, R.N.; Manley, L.P.; Piper, D.J.W.; Deptuck, M.; Johnston, S.K.; Black, S.K. Data Report: Interlaboratory Comparison of Sediment Grain-Sizing Techniques: Data from Amazon Fan upper Levee Complex Sediments. Sci. Results 1997, 155, 217–228. [Google Scholar]
- BSH. FINO Database. Data was made available by the FINO (Forschungsplattformen in Nord- und Ostsee) initiative, which was funded by the German Federal Ministry of Economic Affairs and Energy (BMWi) on the basis of a decision by the German Bundestag, organised by the Projekttraeger Juelich (PTJ) and coordinated by the German Federal Maritime and Hydrographic Agency (BSH). 2020. Available online: http://fino.bsh.de (accessed on 14 September 2020).
- Kaiser, M.J.; Hill, A.S.; Ramsay, K.; Spencer, B.E.; Brand, A.R.; Veale, E.O.; Prudden, K.; Rees, E.I.S.; Munday, B.W.; Ball, B.; et al. Benthic disturbance by fishing gear in the Irish Sea: A comparison of beam trawling and scallop dredging. Aquat. Conserv. Mar. Freshw. Ecosyst. 1996, 6, 17. [Google Scholar] [CrossRef]
- Haesler, S.; Lefebvre, C. Sturmtief HERWART sorgt am 28./29. Oktober 2017 für Orkanböen über Deutschland; Deutscher Wetterdienst: Offenbach, Germany, 2017; p. 6. [Google Scholar]
- Son, C.S.; Flemming, B.W.; Chang, T.S. Sedimentary facies of shoreface-connected sand ridges off the East Frisian barrier-island coast, southern North Sea: Climatic controls and preservation potential. Int. Assoc. Sedimentol. Spec. Publ. 2012, 44, 16. [Google Scholar]
- Flemming, B.W. The concept of wave base: Fact and fiction. In Proceedings of the Sediment 2005, Gwatt, Swizerland, 18–20 July 2020; p. 57. [Google Scholar]
- Rijnsdorp, A.D.; Buys, A.M.; Storbeck, F.; Visser, E.G. Micro-scale distribution of beam trawl effort in the southern North Sea between 1993 and 1996 in relation to the trawling frequency of the sea bed and the impact on benthic organisms. ICES J. Mar. Sci. 1998, 55, 17. [Google Scholar] [CrossRef]
- Gerritsen, H.D.; Minto, C.; Lordan, C. How much of the seabed is impacted by mobile fishing gear? Absolute estimates from Vessel Monitoring System (VMS) point data. ICES J. Mar. Sci. 2013, 70, 9. [Google Scholar] [CrossRef]
- Klaucke, I. Sidescan Sonar. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; p. 554. [Google Scholar] [CrossRef]
- Palanques, A.; Guillén, J.; Piug, P. Impact of bottom trawling on water turbidity and muddy sediment of an unfished continental shelf. Limnol. Oceanogr. 2001, 46, 11. [Google Scholar] [CrossRef]
- Mengual, B.; Cayocca, F.; Le Hir, P.; Draye, R.; Laffargue, P.; Vincent, B.; Garlan, T. Influence of bottom trawling on sediment resuspension in the ‘Grande-Vasière’ area (Bay of Biscay, France). Ocean Dyn. 2016, 66, 1181–1207. [Google Scholar] [CrossRef]
- Feldens, P.; Schulze, I.; Papenmeier, S.; Schönke, M.; von Deimling, J.S. Improved Interpretation of Marine Sedimentary Environments Using Multi-Frequency Multibeam Backscatter Data. Geosciences 2018, 8, 214. [Google Scholar] [CrossRef]
- Lucchetti, A.; Sala, A. Impact and performance of Mediterranean fishing gear by side-scan sonar technology. Can. J. Fish. Ans Aquat. Sci. 2012, 69, 11. [Google Scholar] [CrossRef]
- ICES. Interim Report of the Working Group on Fisheries Benthic Impact and Trade-offs (WGFBIT); ICES Headquarters: Copenhagen, Denmark, 2018; p. 74. [Google Scholar]
- Zhang, W.; Wirtz, K.; Daewl, U.; Wrede, A.; Kröncke, I.; Kuhn, G.; Neumann, A.; Meyer, J.; Ma, M.; Schrum, C. The Budget of Macrobenthic Reworked Organic Carbon: A Modeling Case Study of the North Sea. J. Geophys. Res. Biogeosci. 2019, 124, 26. [Google Scholar] [CrossRef]
- Turenhout, M.N.J.; Zaalmink, B.W.; Strietman, W.J.; Hamon, K.G. Pulse Fisheries in the Netherlands; Economic and Spatial Impact Study; Wageningen Economic Research: Wageningen, The Netherlands, 2016; p. 32. [Google Scholar]
- Depestele, J.; Degrendele, K.; Esmaeili, M.; Ivanović, A.; Kröger, S.; O’Neill, F.G.; Parker, R.; Polet, H.; Roche, M.; Teal, L.R.; et al. Comparison of mechanical disturbance in soft sediments due to tickler-chain SumWing trawl vs. electro-fitted PulseWing trawl. ICES J. Mar. Sci. 2019, 76, 18. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics; Praxis Publishing Ltd.: Chichester, UK, 2002. [Google Scholar]
- ICES. Report of the Working Group on Spatial Fisheries Data (WGSFD). In Proceedings of the WGSFD 2018, Aberdeen, UK, 11–15 June 2018; p. 79. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Site | Survey Pseudo-nym | Official Survey Name | Date of Survey | Survey Area [km2] | Water Depth [m] | Device (SSS)/Coverage of Survey Area | Device (MBES)/Coverage of Survey Area | UW-Video Camera | Grain Sizes |
|---|---|---|---|---|---|---|---|---|---|
| Dogger Bank (DB) | DB1 | HE474 | 15–18 October 2016 | 340 | 30–40 | Edgetech 4200MP/100% | Kongs-berg EM710/40% | Kongsberg Colour Zoom, GoPro Hero4+ black | LPS |
| DB2 | HE478 | 09–13 March 2017 | 425 | 30–40 | Edgetech 4200MP/100% | - | Kongsberg Colour Zoom, GoPro Hero4+ black | LPS | |
| DB3 | HE500 | 02–09 November 2017 | 700 | 30–40 | KLEIN4000, Benthos SIS-1624/50% | - | - | - | |
| DB4 | HE502 | 10–14 December 2017 | 350 | 30–40 | Edgetech 4200MP/100% | - | - | - | |
| DB5 | Senckenberg | 22–24 August 2018 | 230 | 30–40 | KLEIN4000/100% | - | - | SVA | |
| 32_2018 | |||||||||
| DB6 | AL520_02 | 20–31 March 2019 | 640 | 40–55 | KLEIN4000/100% | - | Kongsberg Colour Zoom, GoPro Hero4+ black | SVA | |
| Wind Farm (WF) | WF1 | Senckenberg | 17 July 2018 | 90 | 39–41 | KLEIN4000/50% | - | - | - |
| 25_2018 | |||||||||
| WF2 | Senckenberg | 20–23 May 2019 | 133 | 39–41 | KLEIN4000/100% | - | - | - | |
| 14_2019 | |||||||||
| WF3 | Senckenberg | 24–26 June 2019 | 100 | 39–41 | KLEIN4000/100% | - | - | - | |
| 18_2019 | |||||||||
| WF4 | Senckenberg | 23–25 July 2019 | 260 | 41–42 | KLEIN4000/100% | - | - | - | |
| 21_2019 | |||||||||
| WF5 | HE544 | 15–29 October 2019 | 655 | 41–42 | KLEIN4000/100% | - | - | SVA | |
| Heligoland (HEL) | HEL1 | Senckenberg | 03–06 August 2015 | 144 | 27–41 | Benthos SIS-1624/100% | - | - | SVA |
| 30_2015 | |||||||||
| HEL2 | HE456 | 09–20 February 2016 | 672 | 27–41 | Edgetech 4200MP/100% | - | - | SVA |
| SSS system | Frequency | Horizontal Beam Width | Across-Track Resolution |
|---|---|---|---|
| KLEIN4000 | 100 kHz/400 kHz | 1°/0.3° | 9.6 cm/2.4 cm |
| Benthos SIS 1624 | 100 kHz/400 kHz | 0.5°/0.5° | 5 cm/5 cm |
| Edgetech 4200 MP 1 | 300 kHz/600 kHz | 0.5°/0.26° | 3 cm/1.5 cm |
| Dogger Bank (DB) | Wind Farm (WF) | Heligoland (HEL) | ||||||
|---|---|---|---|---|---|---|---|---|
| width | width | width | width | width | width | width | width | |
| TBB_t | TBB_i | TBB_t | TBB_i | OTB_t | OTB_i | TBB_t | TBB_i | |
| Min | 34.20 | 5.20 | 19.20 | 5.60 | 30.20 | 1.60 | 24.60 | 4.00 |
| Max | 52.40 | 14.80 | 51.60 | 22.00 | 281.60 | 5.90 | 54.40 | 13.80 |
| Mean | 40.20 | 10.17 | 40.80 | 11.39 | 126.22 | 3.06 | 33.03 | 9.50 |
| Median | 39.95 | 10.00 | 42.00 | 11.40 | 127.80 | 3.05 | 31.10 | 9.45 |
| SD | 3.39 | 1.71 | 6.79 | 2.52 | 53.60 | 0.88 | 6.55 | 1.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bruns, I.; Holler, P.; Capperucci, R.M.; Papenmeier, S.; Bartholomä, A. Identifying Trawl Marks in North Sea Sediments. Geosciences 2020, 10, 422. https://doi.org/10.3390/geosciences10110422
Bruns I, Holler P, Capperucci RM, Papenmeier S, Bartholomä A. Identifying Trawl Marks in North Sea Sediments. Geosciences. 2020; 10(11):422. https://doi.org/10.3390/geosciences10110422
Chicago/Turabian StyleBruns, Ines, Peter Holler, Ruggero M. Capperucci, Svenja Papenmeier, and Alexander Bartholomä. 2020. "Identifying Trawl Marks in North Sea Sediments" Geosciences 10, no. 11: 422. https://doi.org/10.3390/geosciences10110422
APA StyleBruns, I., Holler, P., Capperucci, R. M., Papenmeier, S., & Bartholomä, A. (2020). Identifying Trawl Marks in North Sea Sediments. Geosciences, 10(11), 422. https://doi.org/10.3390/geosciences10110422