Using Principles from Applied Behaviour Analysis to Address an Undesired Behaviour: Functional Analysis and Treatment of Jumping Up in Companion Dogs



Simple Summary
Abstract
1. Introduction
1.1. Introduction to Applied Behaviour Analysis
1.2. ABA and Clinical Animal Behaviour
1.3. The Current Study
2. General Method
Participants
3. Experiment 1: Functional Analysis (FA)
3.1. Method
Conditions
3.2. Interobserver Agreement
3.3. Data Analyses
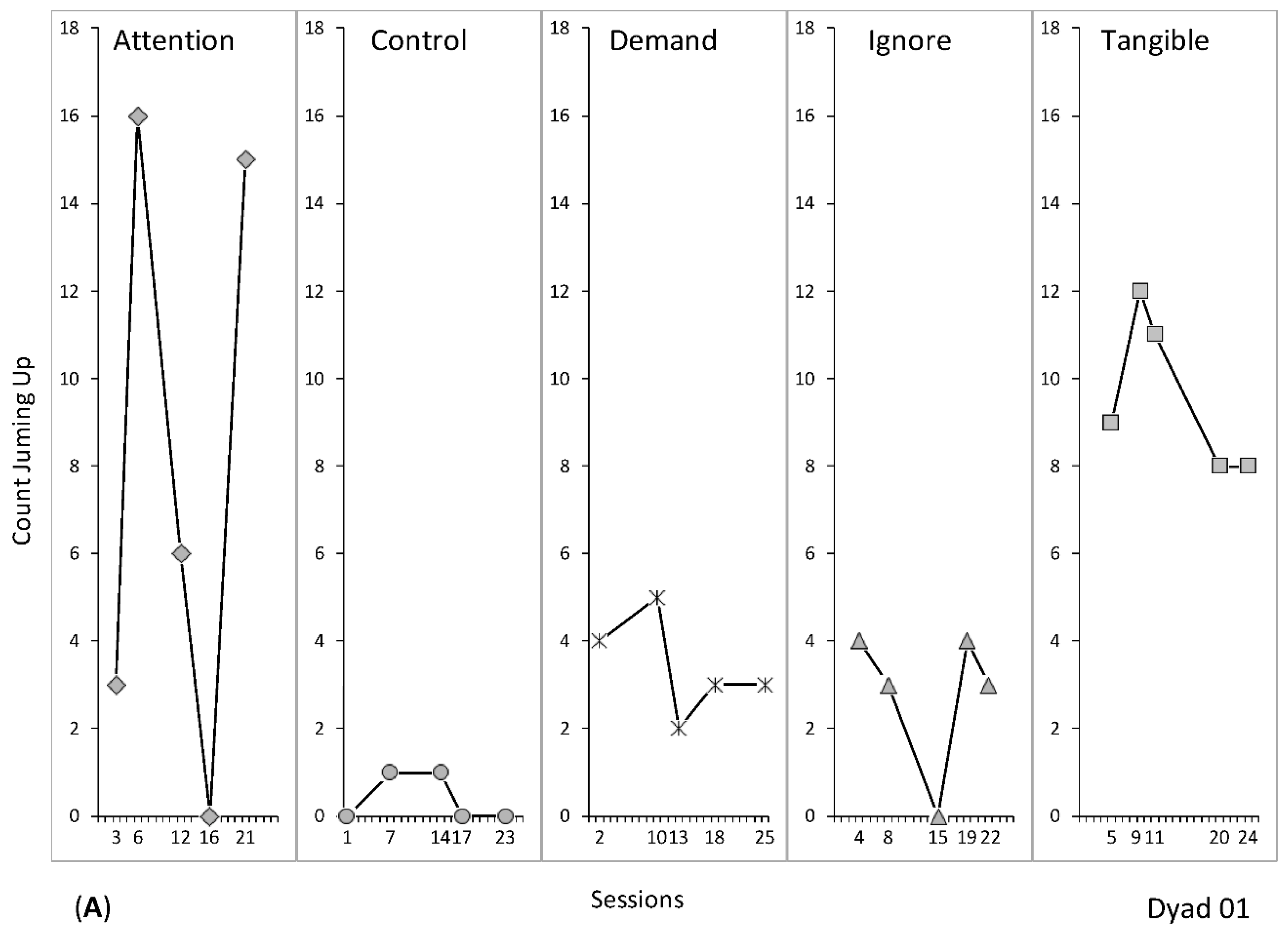
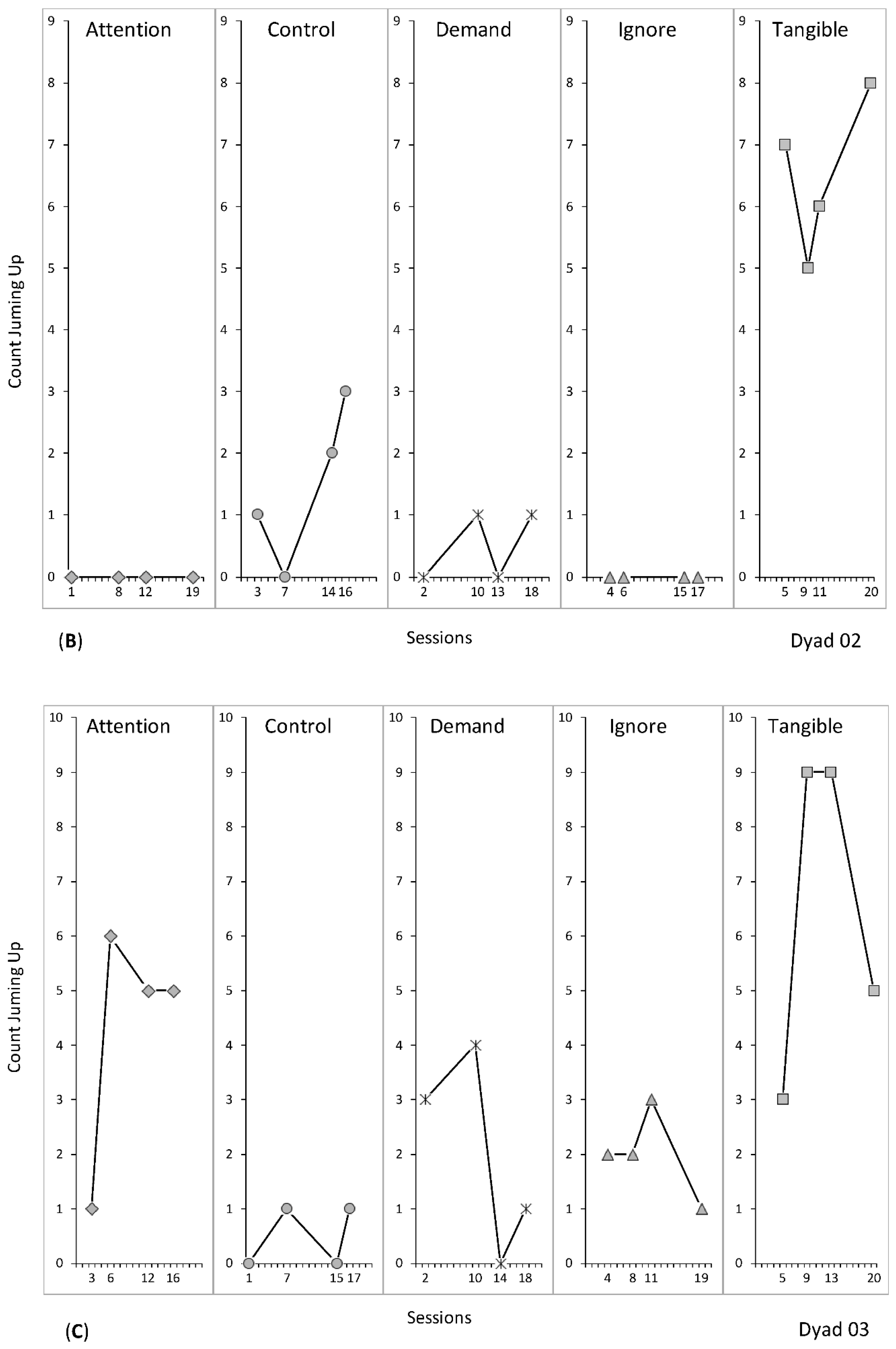
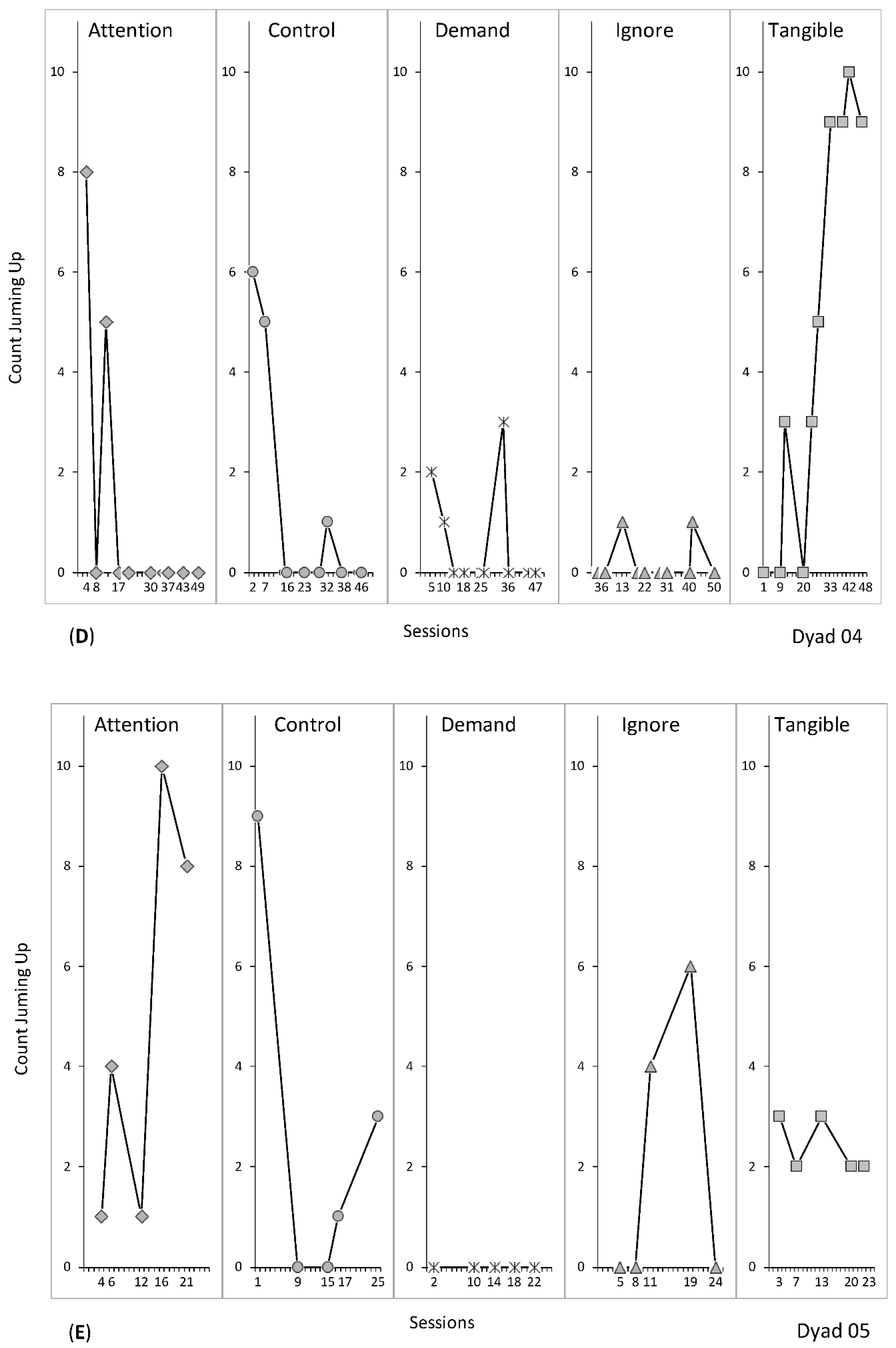
3.4. Results
3.5. Discussion
4. Experiment 2: Behavioural Skills Training and Non-Contingent Reinforcement
4.1. Method
4.1.1. Participants
4.1.2. Data Collection and Experimental Design
Dependent Variables
4.1.3. Design and Procedures
Baseline
Oral Instruction
Modelling by the First Author
Modelling and Feedback
Generalisation
Follow-Up Probe
Social Validity
Procedural Integrity of the First Author
4.2. Interobserver Agreement
4.2.1. Count of Jumping Up and Owner Procedural Integrity of BST
4.2.2. Count of Jumping Up and First Author’s Procedural Integrity of Generalisation Phase
4.3. DataAnalyses
4.4. Results
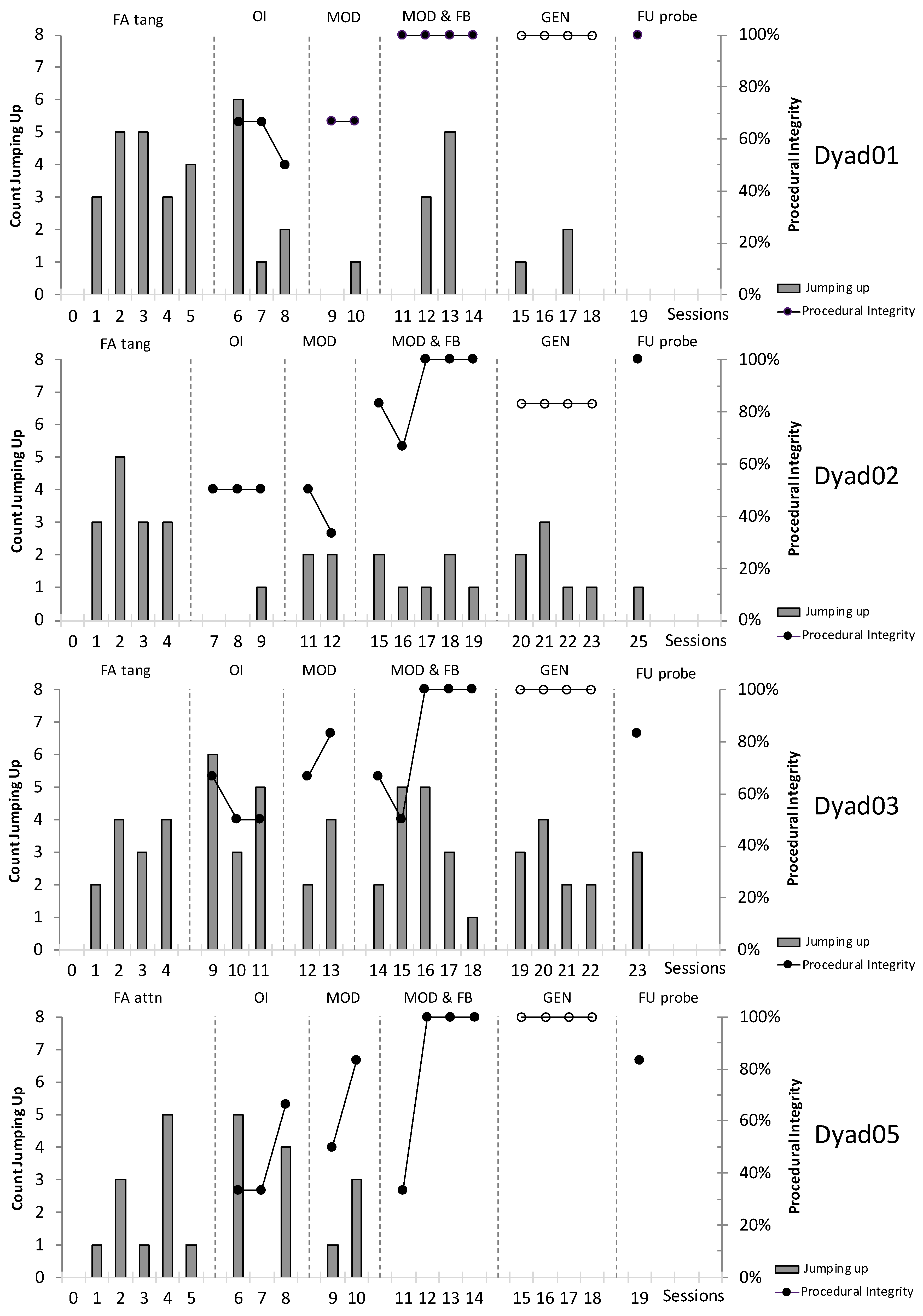
4.4.1. Effectiveness and Procedural Integrity
4.4.2. Generalisation Phase
4.4.3. Follow-Up
4.4.4. Social Validity
4.5. Discussion
5. General Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mondelli, F.; Prato-Previde, E.; Verga, M.; Levi, D.; Magistrelli, S.; Valsecchi, P. The bond that never developed: Adoption and relinquishment of dogs in a rescue shelter. J. Appl. Anim. Welf. Sci. 2004, 7, 253–266. [Google Scholar] [CrossRef] [PubMed]
- Pirrone, F.; Pierantoni, L.; Mazzola, S.M.; Vigo, D.; Albertini, M. Owner and animal factors predict the incidence of, and owner reaction toward, problematic behaviors in companion dogs. J. Vet. Behav. 2015, 10, 295–301. [Google Scholar] [CrossRef]
- Diesel, G.; Brodbelt, D.; Pfeiffer, D.U. Characteristics of relinquished dogs and their owners at 14 rehoming centers in the United Kingdom. J. Appl. Anim. Welf. Sci. 2010, 13, 15–30. [Google Scholar] [CrossRef] [PubMed]
- Gates, M.C.; Zito, S.; Thomas, J.; Dale, A. Post-adoption problem behaviours in adolescent and adult dogs rehomed through a New Zealand animal shelter. Animals 2018, 8, 93. [Google Scholar] [CrossRef]
- Wells, D.L.; Hepper, P.G. Prevalence of behavior problems reported by owners of dogs purchased from an animal rescue shelter. Appl. Anim. Behav. Sci. 2000, 69, 55–65. [Google Scholar] [CrossRef]
- Kwan, J.Y.; Bain, M.J. Owner attachment and problem behaviors related to relinquishment and training techniques of dogs. J. Appl. Anim. Welf. Sci. 2013, 16, 168–183. [Google Scholar] [CrossRef]
- Mills, D.S. Training and learning protocols. In BSAVA Manual of Canine and Feline Behavioural Medicine, 3rd ed.; Horwitz, D., Mills, D.S., Eds.; British Small Animal Veterinary Association: Quedgeley, UK, 2010; pp. 49–64. [Google Scholar]
- Bain, M. Overview of animal training: A welfare perspective. In Encyclopaedia of Animal Behavior, 2nd ed.; Choe, J.C., Ed.; Academic Press: London, UK, 2019; pp. 203–213. [Google Scholar] [CrossRef]
- Groetzinger-Strickler, B. Helping pet owners change pet behaviors. Vet. Clin. Small Anim. 2018, 48, 419–431. [Google Scholar] [CrossRef]
- Dixon, D.R.; Vogel, T.; Tarbox, J. A brief history of functional analysis and applied behavior analysis. In Functional Assessment for Challenging Behaviors, 1st ed.; Matson, J.L., Ed.; Springer Science + Business Media, LLC: Heidelberg, Germany, 2012; pp. 3–24. [Google Scholar]
- Farhoody, P. Behavior analysis: The science of training. Vet. Clin. N. Am. Exot. Anim. Pract. 2012, 15, 361–369. [Google Scholar] [CrossRef]
- Farhoody, P. A framework for solving behavior problems. Vet. Clin. N. Am. Exot. Anim. Pract. 2012, 15, 399–411. [Google Scholar] [CrossRef]
- Cooper, J.O.; Heron, T.E.; Heward, W.L. Applied Behavior Analysis, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Friman, P.C.; Hayes, S.C.; Wilson, K.G. Why behaviour analysts should study emotion: The example of anxiety. J. Appl. Behav. Anal. 1998, 32, 137–156. [Google Scholar] [CrossRef]
- Udell, M.A.R.; Wynne, C.D.L. A review of domestic dogs’ (Canis familiaris) human-like behaviors: Or why behavior analysts should stop worrying and love their dogs. J. Exp. Anal. Behav. 2008, 89, 247–261. [Google Scholar] [CrossRef]
- Alligood, C.A.; Dorey, N.R.; Mehrkam, L.R.; Leighty, K.A. Applying behavior-analytic methodology to the science and practice of environmental enrichment in zoos and aquariums. Zoo Biol. 2017, 36, 175–185. [Google Scholar] [CrossRef]
- Maple, T.L.; Segura, V.D. Advancing behavior analysis in zoos and aquariums. Behav. Anal. 2015, 38, 77–91. [Google Scholar] [CrossRef] [PubMed]
- Howard, V.J.; DiGennaro-Reed, F.D. Training shelter volunteers to teach dog compliance. J. Appl. Behav. Anal. 2014, 47, 344–359. [Google Scholar] [CrossRef]
- Bright, T.M.; Hadden, L. Safewalk: Improving enrichment and adoption rates for shelter dogs by changing human behavior. J. Appl. Anim. Welf. Sci. 2017, 20, 95–105. [Google Scholar] [CrossRef] [PubMed]
- Iwata, B.A.; Dorsey, M.F.; Slifer, J.; Bauman, K.E.; Richman, G.S. Toward a functional analysis of self-injury. Anal. Interv. Dev. Disabil. 1994, 27, 197–209. [Google Scholar] [CrossRef]
- Kazdin, A.E. Artifact, bias, and complexity of assessment: The ABCs of reliability. J. Appl. Behav. Anal. 1977, 10, 141–150. [Google Scholar] [CrossRef]
- Pfaller-Sadovsky, N.; Medina, L.G.; Hurtado-Parrado, C. It is mine! Using clicker training as a treatment of object guarding in 4 companion dogs (Canis lupus familiaris). J. Vet. Behav. 2017, 22, 57–65. [Google Scholar] [CrossRef]
- Protopopova, A.; Kisten, D.; Wynne, C. Evaluating a humane alternative to the bark collar: Automated differential reinforcement of not barking in a home-alone setting. J. Appl. Behav. Anal. 2016, 49, 735–744. [Google Scholar] [CrossRef]
- Winslow, T.; Payne, S.T.; Massoudi, K.A. Functional analysis and treatment of problem behavior in 3 animal shelter dogs. J. Vet. Behav. Clin. Appl. Res. 2018, 26, 27–37. [Google Scholar] [CrossRef]
- Feuerbacher, E.N.; Wynne, C.D.L. Application of functional analysis methods to assess human-dog interactions. J. Appl. Behav. Anal. 2016, 49, 970–974. [Google Scholar] [CrossRef] [PubMed]
- Farmer-Dougan, V. Functional analysis of aggression in a black-and-white ruffed lemur (Varecia variegata variegata). J. Appl. Anim. Welf. Sci. 2014, 17, 282–293. [Google Scholar] [CrossRef] [PubMed]
- Morris, K.L.; Slocum, S.K. Functional analysis and treatment of self-injurious feather plucking in a black vulture (Coragyps atratus). J. Appl. Behav. Anal. 2019. [Google Scholar] [CrossRef] [PubMed]
- Lattal, K.A. The five pillars of the experimental analysis of behavior. In APA Handbook of Behavior Analysis: Methods and Principles; Madden, G.J., Ed.; American Psychological Association: Washington, DC, USA, 2013; Volume 1, pp. 33–63. [Google Scholar] [CrossRef]
- Hurtado-Parrado, C.; Lopez-Lopez, W. Single-case research methods: History and suitability for a psychological science in need of alternatives. Integr. Psychol. Behav. Sci. 2015, 49, 323–349. [Google Scholar] [CrossRef] [PubMed]
- Horner, R.H.; Carr, E.G.; Halle, J.; McGee, G.; Odom, S.; Wolery, M. The use of single-subject research to identify evidence-based practice in Special Education. Except. Child. 2005, 71, 165–179. [Google Scholar] [CrossRef]
- Kazdin, A.E. Research Design in Clinical Psychology, 4th ed.; Allyn & Bacon: Boston, MA, USA, 2003. [Google Scholar]
- Ledford, J.R.; Barton, E.E.; Severini, K.E.; Zimmerman, K.N. A primer on single-case research designs: Contemporary use and analysis. Am. J. Intellect. Dev. Disabil. 2019, 124, 35–56. [Google Scholar] [CrossRef]
- Pierce, W.D.; Cheney, C.D. Behavior Analysis and Learning, 6th ed.; Routledge: New York, NY, USA, 2017. [Google Scholar]
- Laraway, S.; Snycerski, S.; Olson, R.; Becker, B.; Poling, A. The motivating operations concept: Current status and critical response. Psychol. Rec. 2014, 64, 601–623. [Google Scholar] [CrossRef]
- Michael, J. Establishing Operations. Behav. Anal. 1993, 16, 191–206. [Google Scholar] [CrossRef]
- Hanley, G.P. Functional assessment of problem behavior: Dispelling myths, overcoming implementation obstacles, and developing new lore. Behav. Anal. Pract. 2012, 5, 54–72. [Google Scholar] [CrossRef]
- Iwata, B.A.; Dozier, C.L. Clinical application of functional analysis methodology. Behav. Anal. Pract. 2008, 1, 3–9. [Google Scholar] [CrossRef]
- Hanley, G.P.; Iwata, B.A.; McCord, B.E. Functional analysis of problem behavior: A review. J. Appl. Behav. Anal. 2003, 36, 147–185. [Google Scholar] [CrossRef] [PubMed]
- Bear, D.M.; Wolf, M.M.; Risley, T.R. Some current dimensions of applied behavior analysis. J. Appl. Behav. Anal. 1968, 1, 91–97. [Google Scholar] [CrossRef] [PubMed]
- Bear, D.M.; Wolf, M.M.; Risley, T.R. Some still-current dimensions of applied behavior analysis. J. Appl. Behav. Anal. 1987, 20, 313–327. [Google Scholar] [CrossRef] [PubMed]
- Leaf, J.B.; Cihon, J.H.; Ferguson, J.L.; Weinkauf, S.M. An introduction to applied behavior analysis. In Handbook of Childhood Psychopathology and Developmental Disabilities Treatment. Autism and Child Psychopathology Series; Matson, J.J., Ed.; Springer: Cham, Switzerland, 2018; pp. 25–42. [Google Scholar] [CrossRef]
- Carter, S. The Social Validity Manual, 1st ed.; Academic Press: Cambridge, MA, USA, 2010; pp. 1–20. [Google Scholar]
- Gabor, A.M.; Fritz, J.N.; Roath, C.T.; Rothe, B.R.; Gourley, D.A. Caregiver preference for reinforcement-based interventions for problem behavior maintained by positive reinforcement. J. Appl. Behav. Anal. 2016, 49, 215–227. [Google Scholar] [CrossRef] [PubMed]
- Hanley, G.P.; Piazza, C.C.; Fisher, W.W.; Contrucci, S.A.; Maglieri, K.A. Evaluation of client preference for function-based treatment packages. J. Appl. Behav. Anal. 1997, 30, 459–473. [Google Scholar] [CrossRef]
- Langthorne, P.; McGill, P. Assessing the social acceptability of the functional analysis of problem behavior. J. Appl. Behav. Anal. 2011, 44, 403–407. [Google Scholar] [CrossRef]
- Matson, J.L.; Neal, D. History and overview. In Applied Behavior Analysis for Children with Autism Spectrum Disorder, 1st ed.; Matson, J.L., Ed.; Springer Science + Business, LLC: New York, NY, USA, 2009; pp. 1–13. [Google Scholar]
- Behavior Analyst Certification Board. Available online: https://www.bacb.com (accessed on 2 August 2019).
- Gray, J.M.; Diller, J.W. Evaluating the work of applied animal behaviorists as applied behavior analysis. Behav. Anal. Res. Pract. 2017, 17, 33–41. [Google Scholar] [CrossRef]
- Deldalle, S.; Gaunet, F. Effects of 2 training methods on stress-related behaviors of the dog (Canis familiaris) and on the dog-owner relationship. J. Vet. Behav. 2014, 9, 58–65. [Google Scholar] [CrossRef]
- Guilherme-Fernandes, J.; Olsson, I.A.; Vieira de Castro, A. Do aversive-based training methods actually compromise dog welfare: A literature review. Appl. Anim. Behav. Sci. 2017, 196, 1–12. [Google Scholar] [CrossRef]
- Todd, Z. Barriers to the adoption of humane dog training methods. J. Vet. Behav. 2018, 25, 28–34. [Google Scholar] [CrossRef]
- Vieira de Castro, A.C.; Barrett, J.; de Sousa, L.; Olsson, A.S. Carrots versus sticks: The relationship between training methods and dog-owner attachment. Appl. Anim. Behav. Sci. 2019. [Google Scholar] [CrossRef]
- Ziv, G. The effects of using aversive training methods in dogs—A review. J. Vet. Behav. 2017, 19, 50–60. [Google Scholar] [CrossRef]
- Animal Behaviour & Training Council Standard for Practitioners of Animal Training and Behaviour. Available online: http://www.abtcouncil.org.uk/standards-for-practitioners.html (accessed on 2 August 2019).
- International Association of Animal Behavior Consultants Statement on Least Intrusive, Minimally Aversive Standard. Available online: https://m.iaabc.org/about/lima/ (accessed on 2 August 2019).
- Echterling-Savage, K.; DiGennaro-Reed, F.D.; Miller, L.K.; Savage, S. Effects of caregiver-implemented aggression reduction procedure on problem behavior of dogs. J. Appl. Anim. Welf. Sci. 2015, 18, 181–197. [Google Scholar] [CrossRef] [PubMed]
- Hall, N.J.; Protopopova, A.; Wynne, C.D.L. The role of environmental and owner-provided consequences in canine stereotypy and compulsive behavior. J. Vet. Behav. Clin. Appl. Res. 2015, 10, 24–35. [Google Scholar] [CrossRef]
- Yin, S.; Fernandez, E.J.; Pagan, S.; Richardson, S.L.; Snyder, G. Efficacy of a remote-controlled, positive-reinforcement, dog-training system for modifying problem behaviors exhibited when people arrive at the door. Appl. Anim. Behav. Sci. 2008, 113, 123–138. [Google Scholar] [CrossRef]
- Dorey, N.R.; Tobias, J.S.; Udell, M.A.R.; Wynne, C.D.L. Decreasing dog problem behavior with functional analysis: Linking diagnoses to treatment. J. Vet. Behav. Clin. Appl. Res. 2012, 7, 276–282. [Google Scholar] [CrossRef]
- Pirner, G.; McGlone, J. Impact of androstenone on leash pulling and jumping up in dogs. Animals 2016, 6, 34. [Google Scholar] [CrossRef]
- Coren, S. How Dogs Think: Understanding the Canine Mind, 1st ed.; Simon & Schuster Adult Publishing Group: New York, NY, USA, 2004. [Google Scholar]
- Overall, K.L. Problematic Canine Behaviors: Roles for Undesirable, Odd, and Management-Related Concerns. Manual of Clinical Behavioral Medicine for Dogs and Cats. 2013. Chapter 5. pp. 162–171. Available online: https://veteriankey.com/problematic-canine-behaviors-roles-for-undesirable-odd-and-management-related-concerns/ (accessed on 6 December 2019).
- Vollmer, T.R.; Iwata, B.A.; Zarcone, J.R.; Smith, R.G.; Mazaleski, J.L. The role of attention in the treatment of attention-maintained self-injurious behavior: Noncontingent reinforcement and differential reinforcement of other behavior. J. Appl. Behav. Anal. 1993, 26, 9–21. [Google Scholar] [CrossRef]
- Sarokoff, R.A.; Sturmey, P. The effects of behavioral skills training on staff implementation of discrete-trial teaching. J. Appl. Behav. Anal. 2004, 37, 535–538. [Google Scholar] [CrossRef]
- Miles, N.I.; Wilder, D.A. The effects of behavioral skills training on caregiver implementation of guided compliance. J. Appl. Behav. Anal. 2009, 42, 405–410. [Google Scholar] [CrossRef]
- Himle, M.B.; Miltenberger, R.G. Preventing unintentional firearm injury in children: The need for behavioral skills training. Educ. Treat. Child. 2004, 27, 161–177. [Google Scholar]
- Houvouras, A.J.; Harvey, M.T. Establishing fire safety skills using behavioral skills training. J. Appl. Behav. Anal. 2014, 47, 420–424. [Google Scholar] [CrossRef] [PubMed]
- Lewon, M.; Webb, E.K.; Brotheridge, S.M.; Cox, C.; Fast, C.D. Behavioral skills training in scent detection research: Interactions between trainer and animal behavior. J. Appl. Behav. Anal. 2019, 52, 682–700. [Google Scholar] [CrossRef] [PubMed]
- Carr, J.E.; Kellum, K.K.; Chong, I.M. The reductive effects of noncontingent reinforcement: Fixed-time versus variable-time schedules. J. Appl. Behav. Anal. 2001, 34, 505–509. [Google Scholar] [CrossRef]
- Doughty, S.S.; Anderson, C.M. Effects of noncontingent reinforcement and functional communication training on problem behavior and mands. Educ. Treat. Child. 2006, 29, 23–50. [Google Scholar]
- Phillips, C.L.; Iannaccone, J.A.; Rooker, G.W.; Hagopian, L.P. Noncontingent reinforcement for the treatment of severe problem behavior: An analysis of 27 consecutive applications. J. Appl. Behav. Anal. 2017, 50, 357–376. [Google Scholar] [CrossRef]
- Wallace, M.D.; Iwata, B.A.; Hanley, G.P.; Thompson, R.H.; Roscoe, E.M. Noncontingent reinforcement: A further examination of schedule effects during treatment. J. Appl. Behav. Anal. 2012, 45, 709–719. [Google Scholar] [CrossRef]
- Ecott, C.L.; Critchfield, T.S. Noncontingent reinforcement, alternative reinforcement, and the matching law: A laboratory demonstration. J. Appl. Behav. Anal. 2004, 37, 249–265. [Google Scholar] [CrossRef]
- Dotson, M.J.; Hyatt, E.M. Understanding dog-human companionship. J. Bus. Res. 2008, 61, 457–466. [Google Scholar] [CrossRef]
- Ben-Aderet, T.; Gallego-Abenza, M.; Reby, D.; Mathevon, N. Dog-directed speech: Why do we use it and do dogs pay attention? Proc. R. Soc. B 2017, 284, 20162429. [Google Scholar] [CrossRef]
- Bourret, J.C.; Pietras, C.J. Visual analysis in single-case research. In APA Handbook of Behavior Analysis, Methods and Principles, 1st ed.; Madden, G.J., Dube, W.V., Hackenberg, T.D., Hanley, G.P., Latta, K.A., Eds.; American Psychological Association: Washington, DC, USA, 2013; Volume 1, pp. 199–217. [Google Scholar] [CrossRef]
- Kratochwill, T.R.; Levin, J.R.; Horner, R.H.; Swoboda, C.M. Visual analysis of single-case intervention research: Conceptual and methodological issues. In Single-Case Intervention Research; Kratochwill, T.R., Levin, J.R., Eds.; American Psychological Association: Washington, DC, USA, 2014; pp. 91–125. [Google Scholar]
- Parker, R.I.; Vannest, K.J.; Davis, J.L. Non-Overlap analysis for single-case research. In Single-Case Intervention Research; Kratochwill, T.R., Levin, J.R., Eds.; American Psychological Association: Washington, DC, USA, 2014; pp. 124–151. [Google Scholar]
- Vannest, K.J.; Parker, R.I.; Gonen, O.; Adiguzel, T. Single Case Research: Web-Based Calculators for SCR Analysis, Version 2.0; Texas A&M University: College Station, TX, USA, 2016; Available online: http://www.singlecaseresearch.org/calculators/tau-u (accessed on 19 August 2019).
- Parker, R.I.; Vannest, K.J.; Davis, J.L. Effect size in single-case research: A review of nine nonoverlap techniques. Behav. Modif. 2011, 35, 303–322. [Google Scholar] [CrossRef] [PubMed]
- Vannest, K.J.; Ninci, J. Evaluating intervention effects in single-case research designs. J. Couns. Dev. 2015, 93, 403–411. [Google Scholar] [CrossRef]
- Hurtado-Parrado, C.; Gonzalez-Leon, C.; Arias-Higuera, M.A.; Cardona, A.; Medina, L.G.; Garcia-Munoz, L.; Sanchez, C.; Cifuentes, J.; Forigua, J.C.; Ortiz, A.; et al. Assessing Mongolian gerbil emotional behavior: Effects of two shock intensities and response-independent shocks during an extended inhibitory-avoidance task. PeerJ 2017, 5, e4009. [Google Scholar] [CrossRef] [PubMed]
- Parker, R.I.; Vannest, K.J. An improved effect size for single case research: Nonoverlap of all pairs (NAP). Behav. Ther. 2009, 40, 357–367. [Google Scholar] [CrossRef] [PubMed]
- Rakap, S. Effect sizes as result interpretation aids in single-subject experimental research: Description and application of four nonoverlap methods. Br. J. Spec. Educ. 2015, 42, 11–33. [Google Scholar] [CrossRef]
- Center for Open Science. Available online: https://osf.io/3wg9a/ (accessed on 30 August 2019). [CrossRef]
- Rooker, G.W.; Iwata, B.A.; Harper, J.M.; Fahmie, T.A.; Camp, E.M. False-positve outcomes of functional analysis. J. Appl. Behav. Anal. 2011, 44, 737–745. [Google Scholar] [CrossRef]
- Shirley, M.J.; Iwata, B.A.; Kahng, S. False-positive maintenance of self-injurious behavior by access to tangible reinforcers. J. Appl. Behav. Anal. 1999, 32, 201–204. [Google Scholar] [CrossRef]
- Kurtz, P.F.; Fodstad, J.C.; Huete, J.M.; Hagopian, L.P. Caregiver- and staff-conducted functional analysis outcomes: A summary of 52 cases. J. Appl. Behav. Anal. 2013, 46, 738–749. [Google Scholar] [CrossRef]
- Carr, J.E.; Coriaty, S.; Wilder, D.A.; Gaunt, B.T.; Dozier, C.L.; Britton, L.N.; Avina, C.; Reed, C.L. A review of “noncontingent” reinforcement as treatment for the aberrant behavior of individuals with developmental disabilities. Res. Dev. Disabil. 2000, 21, 377–391. [Google Scholar] [CrossRef]
- Hagopian, L.P.; Crockett, J.L.; van Stone, M.; DeLeon, I.G.; Bowman, L.G. Effects of noncontingent reinforcement on problem behavior and stimulus engagement: The role of satiation, extinction, and alternative reinforcement. J. Appl. Behav. Anal. 2000, 33, 433–449. [Google Scholar] [CrossRef]
- Lindberg, J.S.; Iwata, B.A.; Roscoe, E.M.; Worsdell, A.S.; Hanley, G.P. Treatment efficacy of noncontingent reinforcement during brief and extended application. J. Appl. Behav. Anal. 2003, 36, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Butler, R.; Sargisson, R.J.; Elliffe, D. The efficacy of systematic desensitization for treating the separation-related problem behaviour of domestic dogs. Appl. Anim. Behav. Sci. 2011, 129, 136–145. [Google Scholar] [CrossRef]
- Alberto, P.A.; Troutman, A.C. Applied Behavior Analysis for Teachers, 9th ed.; Pearson Education: Upper Saddle River, NJ, USA, 2013. [Google Scholar]
- Warrington, S. An evaluation of Behavior Skills Training to Teach Assertiveness Skills to College Students. Master’s Thesis, Central Washington University, Ellensburg, WA, USA, 2015. [Google Scholar]
- Cataldo, M.F.; Ward, E.M.; Russo, D.C.; Riordan, M.; Bennett, D. Compliance and correlated behaviour in children: Effects of contingent and noncontingent reinforcement. Anal. Interv. Dev. Disabil. 1986, 6, 265–282. [Google Scholar] [CrossRef]
- Simmons, J.N.; Smith, R.G.; Kliethermes, L. A multiple-schedule evaluation of immediate and subsequent effects of fixed-time food presentation on automatically maintained mouthing. J. Appl. Behav. Anal. 2003, 36, 541–544. [Google Scholar] [CrossRef] [PubMed]
- Ing, A.D.; Roane, H.S.; Veenstra, R.A. Functional analysis and treatment of coprophagia. J. Appl. Behav. Anal. 2011, 44, 151–155. [Google Scholar] [CrossRef]
- Kahng, S.; Iwata, B.A.; DeLeon, I.G.; Wallace, M.D. A comparison of procedures for programming noncontingent reinforcement schedules. J. Appl. Behav. Anal. 2000, 33, 223–231. [Google Scholar] [CrossRef]
- Piazza, C.C.; Adelinis, J.D.; Hanley, G.P.; Goh, H.; Delia, M.D. An evaluation of the effects of matched stimuli on behaviors maintained by automatic reinforcement. J. Appl. Behav. Anal. 2000, 33, 13–27. [Google Scholar] [CrossRef]
- Sidener, T.M.; Carr, J.E.; Firth, A.M. Superimposition and withholding of edible consequences as treatment for automatically reinforced stereotypy. J. Appl. Behav. Anal. 2005, 38, 121–124. [Google Scholar] [CrossRef]
- Sigafoos, J.; Pennell, D. Noncontingent application versus contingent removal of tactile stimulation: Effects on self-injury in a young boy with multiple disabilities. Behav. Chang. 1995, 12, 139–143. [Google Scholar] [CrossRef]
- Richman, D.M.; Barnard-Brak, L.; Grubb, L.; Bosch, A.; Abby, L. Meta-Analysis of noncontingent reinforcement effects on problem behavior. J. Appl. Behav. Anal. 2015, 48, 131–152. [Google Scholar] [CrossRef]
- Ritter, W.A.; Barnard-Brak, L.; Richman, D.M.; Grubb, L.M. The influence of function, topography, and setting on noncontingent reinforcement effect sizes for reduction in problem behavior: A meta-analysis of single-case experimental design data. J. Behav. Educ. 2018, 27, 1–22. [Google Scholar] [CrossRef]
- Horner, R.H.; Kratochwill, T.R. Synthesizing single-case research to identify evidence-based practices: Some brief reflections. J. Behav. Educ. 2012, 21, 266–272. [Google Scholar] [CrossRef]
- Kratochwill, T.R.; Hitchcock, J.H.; Horner, R.H.; Levin, J.R.; Odom, S.L.; Rindskopf, D.M.; Shadish, W.R. Single-case intervention research design standards. Remedial Spec. Educ. 2013, 34, 26–38. [Google Scholar] [CrossRef]
- Protopopva, A.; Matter, A.L.; Harris, B.N.; Wiskow, K.M.; Donaldson, J.M. Comparison of contingent and noncontingent acess to therapy dogs during academic tasks in children with autism spectrum disorder. J. Appl. Behav. Anal. 2019. [Google Scholar] [CrossRef]
- Van Camp, C.M.; Lerman, D.C.; Kelley, M.E.; Contrucci, S.A.; Vorndran, C.M. Variable-time reinforcement schedules in the treatment of socially maintained problem behavior. J. Appl. Behav. Anal. 2000, 33, 545–557. [Google Scholar] [CrossRef]
- Hagopian, L.P.; Toole, L.M.; Long, E.S.; Bowman, L.G.; Lieving, G.A. A comparison of dense-to-lean and fixed lean schedules of alternative reinforcement and extinction. J. Appl. Behav. Anal. 2004, 37, 323–337. [Google Scholar] [CrossRef]
- Ward-Horner, J.; Sturmey, P. Component analyses using single-subject experimental designs: A review. J. Appl. Behav. Anal. 2012, 43, 685–704. [Google Scholar] [CrossRef]
- LaBrot, Z.C.; Radley, K.C.; Dart, E.; Moore, J.; Cavell, H.J. A component analysis of behavioral skills training for effective instruction. J. Fam. Psychother. 2018, 29, 122–141. [Google Scholar] [CrossRef]
- Stokes, T.F.; Bear, D.M. An implicit technology of generalization. J. Appl. Behav. Anal. 1977, 10, 349–367. [Google Scholar] [CrossRef]
- Alaimo, C.; Seiverling, L.; Sarubbi, J.; Sturmey, P. The effects of a behavioral skills training and general-case training package on caregiver implementation of a food selectivity intervention. Behav. Interv. 2018, 33, 26–40. [Google Scholar] [CrossRef]
- Fatjo, J.; Bowen, J. Medical and metabolic influences on behavioural disorders. In BSAVA Manual of Canine and Feline Behavioural Medicine, 3rd ed.; Horwitz, D., Mills, D.S., Eds.; British Small Animal Veterinary Association: Quedgeley, UK, 2010; pp. 1–9. [Google Scholar]
- Miltenberger, R.G.; Bloom, S.E.; Sanchez, S.; Valbuena, D.A. Functional assessment. In Handbook of Evidence-Based Practices in Intellectual and Developmental Disabilities, 1st ed.; Singh, N.N., Ed.; Springer International Publishing: Lucerne, Switzerland, 2016; pp. 69–97. [Google Scholar] [CrossRef]
- Vollmer, T.R.; Peters, K.P.; Slocum, S.K. Treatment of severe behavior disorders. In Clinical and Organizational Applications of Applied Behavior Analysis, 1st ed.; Roane, H.S., Ringdahl, J.L., Falcomata, T.S., Eds.; Academic Press: Boston, MA, USA, 2015; pp. 47–67. [Google Scholar] [CrossRef]
- Shepherd, K. The ladder of aggression. In British Small Animal Veterinary Association Manual of Canine and Feline Behavioural Medicine; Horwitz, D.F., Mills, D.S., Eds.; John Wiley & Sons: London, UK, 2010; pp. 13–16. [Google Scholar]
- DiGennaro-Reed, F.D.; Codding, R.; Catania, C.N.; Maguire, H. Effects of video modeling on treatment integrity of behavioral interventions. J. Appl. Behav. Anal. 2010, 43, 291–295. [Google Scholar] [CrossRef] [PubMed]
- Fryling, M.J.; Wallace, M.D.; Yassine, J.N. Impact of treatment integrity on intervention effectiveness. J. Appl. Behav. Anal. 2012, 45, 449–453. [Google Scholar] [CrossRef] [PubMed]
- Hagermoser-Sanetti, L.M.; Kratochwill, T.R. Treatment integrity in behavioral consultation: Measurement, promotion, and outcomes. Int. J. Behav. Consult. Ther. 2008, 4, 95–114. [Google Scholar] [CrossRef]
- Carr, J.E.; Dozier, C.L.; Patel, M.R.; Adams-Nicolson, A.; Martin, N. Treatment of automatically reinforced object mouthing with noncontingent reinforcement and response blocking: Experimental analysis and social validation. Res. Dev. Disabil. 2002, 23, 37–44. [Google Scholar] [CrossRef]
- Noel, C.R.; Getch, Y.Q. Noncontingent reinforcement in after-school settings to decrease classroom disruptive behavior for students with autism spectrum disorder. Behav. Anal. Pract. 2016, 9, 261–265. [Google Scholar] [CrossRef] [PubMed]
- Bearss, K.; Burrell, T.L.; Stewart, L.; Scahill, L. Parent training in autism spectrum disorder: What’s in a name? Clin. Child Fam. Psychol. Rev. 2015, 18, 170–182. [Google Scholar] [CrossRef] [PubMed]
- Catania, A.C. A natural science of behavior. Rev. Gen. Psychol. 2013, 17, 133–139. [Google Scholar] [CrossRef]
- Lalli, J.S.; Casey, S.D.; Kates, K. Noncontingent reinforcement as treatment for severe problem behavior: Some procedural variations. J. Appl. Behav. Anal. 1997, 30, 127–137. [Google Scholar] [CrossRef]
- Johnston, J.M.; Pennypacker, H.S. Strategies and Tactics of Behavioral Research, 3rd ed.; Taylor & Francis Group: New York, NY, USA, 2009. [Google Scholar]
- Sidman, M. Tactics of Scientific Research, 1st ed.; Basic Books: Oxford, UK, 1960. [Google Scholar]
- Johnston, J.M. On the relation between generalization and generality. Behav. Anal. 1979, 2, 1–6. [Google Scholar] [CrossRef]
- Kratochwill, T.R.; Hitchcock, J.H.; Horner, R.H.; Levin, J.R.; Odom, S.L.; Rindskopf, D.M.; Shadish, W.R. Single-case design technical documentation. What Work. Clgh. 2010, 1–34. Available online: http://ies.ed.gov/ncee/wwc/pdf/wwc_scd.pdf (accessed on 3 June 2019).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dyad | Breed | Age | Sex | Owner | Request | Edible | Tangible |
|---|---|---|---|---|---|---|---|
| D01 | Cocker Spaniel | 3 years | m/i | Female (31–40 years) Two dogs | Repertoire: sit, hand touch New: weaving through legs | Dry food | Tennis ball |
| D02 | Mixed breed | 4 years | f/n | Female (31–40 years) First dog | Repertoire: sit, down New: beg | Dry food | Large ball |
| D03 | Dutch Shepherd | 4 years | m/n | Female (21–30 years) Multiple dogs | Repertoire: sit, hand touch New: bow | Dry food | Plush toy |
| D04 | Miniature Poodle | 4 years | f/i | Female (51–60 years) Multiple dogs | Repertoire: sit, down New: hand touch | Dried Meat stripes | Rubber ball |
| D05 | Mixed breed | 12 years | f/n | Female (51–60 years) Multiple dogs | Repertoire: sit, down New: paw | Pieces of cheese | Leash and leaving 1 |
| Dyads | Cycles Completed | Number of Sessions |
|---|---|---|
| D01 | 5 | 25 |
| D02 | 4 | 20 |
| D03 | 4 | 20 |
| D04 | 10 | 50 |
| D05 | 5 | 25 |
| Sequence of Calculation | Contrasted Conditions | Tau | CI 90% | p-Values |
|---|---|---|---|---|
| 1 | control vs. attention | 0.72 | 0.09 to 1 | 0.0601 |
| 2 | control vs. demand | 1 | 0.37 to 1 | 0.009 * |
| 3 | control vs. ignore | 0.72 | 0.09 to 1 | 0.601 |
| 4 | control vs. tangible | 1 | 0.37 to 1 | 0.009 * |
| 5 | attention vs. tangible | 0.2 | −0.43 to 0.83 | 0.6015 |
| 6 | attention vs. demand | −0.36 | −0.99 to 0.27 | 0.3472 |
| 7 | attention vs. ignore | −0.4 | −1 to 0.23 | 0.2963 |
| 8 | tangible vs. demand | 1 | 0.37 to 1 | 0.009 * |
| 9 | tangible vs. ignore | 1 | 0.37 to 1 | 0.009 * |
| Averaged | ||||
| 10 | 5 + 6 + 7 (all attention) | −0.19 | −0.55 to 0.18 | 0.3985 |
| 11 | 5 + 8 + 9 (all tangible) | 0.73 | 0.37 to 1 | 0.0009 * |
| Oral Instruction | |
|---|---|
| Tangible Reinforcement | Attention Reinforcement |
| While walking through the door, lower your upper body and hold the toy towards the floor. Immediately on entering, let your dog interact with the toy for 10 s. When 10 s have passed, take the toy from your dog, and do not look at him/her for 10 s. Hold the toy in a manner that is comfortable for you and so the dog cannot access it. After 10 s, return the toy to your dog and let him/her engage with it for another 10 s. This sequence is repeated three times until 60 s have passed, irrespective of your dog’s behaviour. Once the sequence has been repeated three times, you leave the room, taking the toy with you. To ensure that you keep to the 10 s time intervals, please count from 21 to 30 during each interval. | While walking through the door, lower your upper body, with your hands loosely reaching towards the floor. Provide attention to your dog by talking to her in a soft tone and/or gently stroke her for 10 s. After 10 s has passed, stop attending to your dog and do not look at her for 10 s. Irrespective of your dog’s behaviour, pet and/or talk to her again for another 10 s. This sequence is repeated three times until 60 s have been completed. Once the sequence has been repeated three times, you leave the room. To ensure that you keep to the 10 s time interval, please count from 21 to 30 during each interval. |
| Steps | Description of Each Step |
|---|---|
| Attention/Tangible Reinforcement | |
| 6 | Bending over, with hands towards the floor when entering. A soft voice was used during the attention intervals (10 s ± 2 s). Not looking at the dog and standing still for 10 s ± 2 s was implemented. The sequence was repeated until 60 s ± 6 s have passed (6 intervals), then the owner left the training area through the front door. |
| 5 | Bending over, with hands towards the floor when entering. A soft voice was used during the attention intervals (10 s ± 2 s). Not looking at the dog and standing still for 10 s ± 2 s was implemented. The sequence was correctly repeated twice. The owner left the training area through the front door. |
| 4 | Bending over, with hands towards the floor when entering. A soft voice was used during the attention intervals (10 s ± 2 s). Not looking at the dog and standing still for 10 s ± 2 s was implemented. The sequence was correctly repeated once. The owner left the training area through the front door. |
| 3 | Standing upright, with hands reaching towards the floor when entering. Attention or ignore responses were either too short or too long (<10 s ± 2 s>) across two intervals. A soft voice was used during the attention intervals. Not looking at the dog and standing still for 10 s ± 2 s did not occur in at least one of the sequences. The owner left the training area through the front door. |
| 2 | Standing upright, with hands held at hip height when entering. Attention or ignore responses were either too short or too long (<10 s ± 2 s>) across three intervals. A high-pitched voice was used during the attention intervals. Not looking at the dog and standing still for 10 s did not occur in at least two of the sequences. The owner left the training area through the front door. |
| 1 | Bending over, with hands toward the floor when entering. Attention was continuously provided across all 10 s ± 2 s intervals. The owner left the training area through the front door. |
| 0 | Standing upright, with hands toward the floor when entering. Attention was not provided or undesired attention (i.e., reprimanding or scolding of the dog; vocal attention only) was given. The owner did or did not leave the training area through the front door. |
| Statistics | D01 | D02 | D03 | D05 | |
|---|---|---|---|---|---|
| Averaged Tau | Tau | −0.59 | −1 | 0.15 | −0.32 |
| CI 90% | −1 to 0.15 | −1 to −0.55 | −0.29 to 0.61 | −0.76 to 0.11 | |
| p-value | 0.026 * | 0.0003 * | 0.569 | 0.220 | |
| BSL vs. GEN ° | Tau | −1 | −0.81 | −0.37 | −1 |
| CI 90% | −1 to −0.328 | −1 to −0.100 | −1 to 0.400 | −1 to −0.32 | |
| p-value | 0.014 * | 0.061 | 0.470 | 0.014 * |
| Dyads and Phases | Mean Jumps Per Minute | Reduction of Jumping 1 |
|---|---|---|
| Dyad 01 | ||
| Baseline | 4 | – |
| Oral instruction | 3 | 25% |
| Modelling | 0.5 | 87.5% |
| Modelling and feedback | 2 | 50% |
| Average (OI, MOD, MOD, and FB) | 1.8 | 54.2% |
| Dyad 02 | ||
| Baseline | 3.5 | – |
| Oral instruction | 0.3 | 90.5% |
| Modelling | 2 | 42.9% |
| Modelling and feedback | 1.4 | 60% |
| Average (OI, MOD, MOD, and FB) | 1.2 | 64.4% |
| Dyad 03 | ||
| Baseline | 3.25 | – |
| Oral instruction | 4.7 | −43.6% |
| Modelling | 3 | 7.7% |
| Modelling and feedback | 3.2 | 1.5% |
| Average (OI, MOD, MOD, and FB) | 3.6 | −11.5% |
| Dyad 05 | ||
| Baseline | 2.2 | – |
| Oral instruction | 3 | −36.4% |
| Modelling | 2 | 9.1% |
| Modelling and feedback | 0 | 100% |
| Average (OI, MOD, MOD, and FB) | 1.7 | 24.2 |
| Owners | Oral Instruction | Modelling | Modelling and Feedback |
|---|---|---|---|
| Owner dyad 01 | 61.1% | 66.7% | 100% |
| Owner dyad 02 | 50% | 41.7% | 90% |
| Owner dyad 03 | 55.6% | 75% | 83.3% |
| Owner dyad 05 | 44.4% | 66.7% | 83.3% |
| Dyads | Mean Jumps Per Minute | Mean Percent Reduction of Jumps | Mean Procedural Integrity |
|---|---|---|---|
| Dog dyad 01 | 0.75 | 81.25% | 100% |
| Dog dyad 02 | 1.75 | 50% | 83.3% |
| Dog dyad 03 | 2.75 | 15.4% | 100% |
| Dog dyad 05 | 0 | 100% | 100% |
| Rank Items | 1—Strongly Disagree | 2—Disagree | 3—Partly Agree | 4—Agree | 5—Strongly Agree | Mean (SD) |
|---|---|---|---|---|---|---|
| 1. I think that oral instruction by the researcher was sufficient to train my dog according to instructions. | – | – | – | – | 4 | 5 (0) |
| 2. I think that modelling using the fake dog was helpful to train my dog according to instructions. | – | – | 1 | 2 | 1 | 4 (0.6) |
| 3. I think that modelling and feedback including the use of the fake dog were helpful to train my dog according to instructions. | – | – | – | 1 | 3 | 4.75 (1.9) |
| 4. I think that the researchers feedback based on my training with the dog was effective and helpful. | – | – | – | 1 | 3 | 4.75 (1.9) |
| 5. I think that the Behavioural Skills Training method was effective and helpful to learn the skills necessary to train my dog. | – | – | – | 3 | 1 | 4.25 (1.2) |
| 6. I think that the time-based reinforcement approach was effective and helpful for training my dog. | – | – | – | 2 | 2 | 4.5 (0.4) |
| 7. I think that the time-based reinforcement approach was unproblematic for me and my dog. | – | – | – | 1 | 3 | 4.75 (1.9) |
| 8. I think that the time-based reinforcement approach was stressful for my dog. | 3 | – | 1 | – | – | (0.4) |
| 9. Occurrences of jumping up decreased since initiating the intervention and training. | – | – | 1 | 2 | 1 | 4 (0.6) |
| 10. I like the methods used. | – | – | – | – | 4 | 5 (0) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pfaller-Sadovsky, N.; Arnott, G.; Hurtado-Parrado, C. Using Principles from Applied Behaviour Analysis to Address an Undesired Behaviour: Functional Analysis and Treatment of Jumping Up in Companion Dogs. Animals 2019, 9, 1091. https://doi.org/10.3390/ani9121091
Pfaller-Sadovsky N, Arnott G, Hurtado-Parrado C. Using Principles from Applied Behaviour Analysis to Address an Undesired Behaviour: Functional Analysis and Treatment of Jumping Up in Companion Dogs. Animals. 2019; 9(12):1091. https://doi.org/10.3390/ani9121091
Chicago/Turabian StylePfaller-Sadovsky, Nicole, Gareth Arnott, and Camilo Hurtado-Parrado. 2019. "Using Principles from Applied Behaviour Analysis to Address an Undesired Behaviour: Functional Analysis and Treatment of Jumping Up in Companion Dogs" Animals 9, no. 12: 1091. https://doi.org/10.3390/ani9121091
APA StylePfaller-Sadovsky, N., Arnott, G., & Hurtado-Parrado, C. (2019). Using Principles from Applied Behaviour Analysis to Address an Undesired Behaviour: Functional Analysis and Treatment of Jumping Up in Companion Dogs. Animals, 9(12), 1091. https://doi.org/10.3390/ani9121091