Artificial Grass as an Alternative Laneway Surface for Dairy Cows Walking to Pasture


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
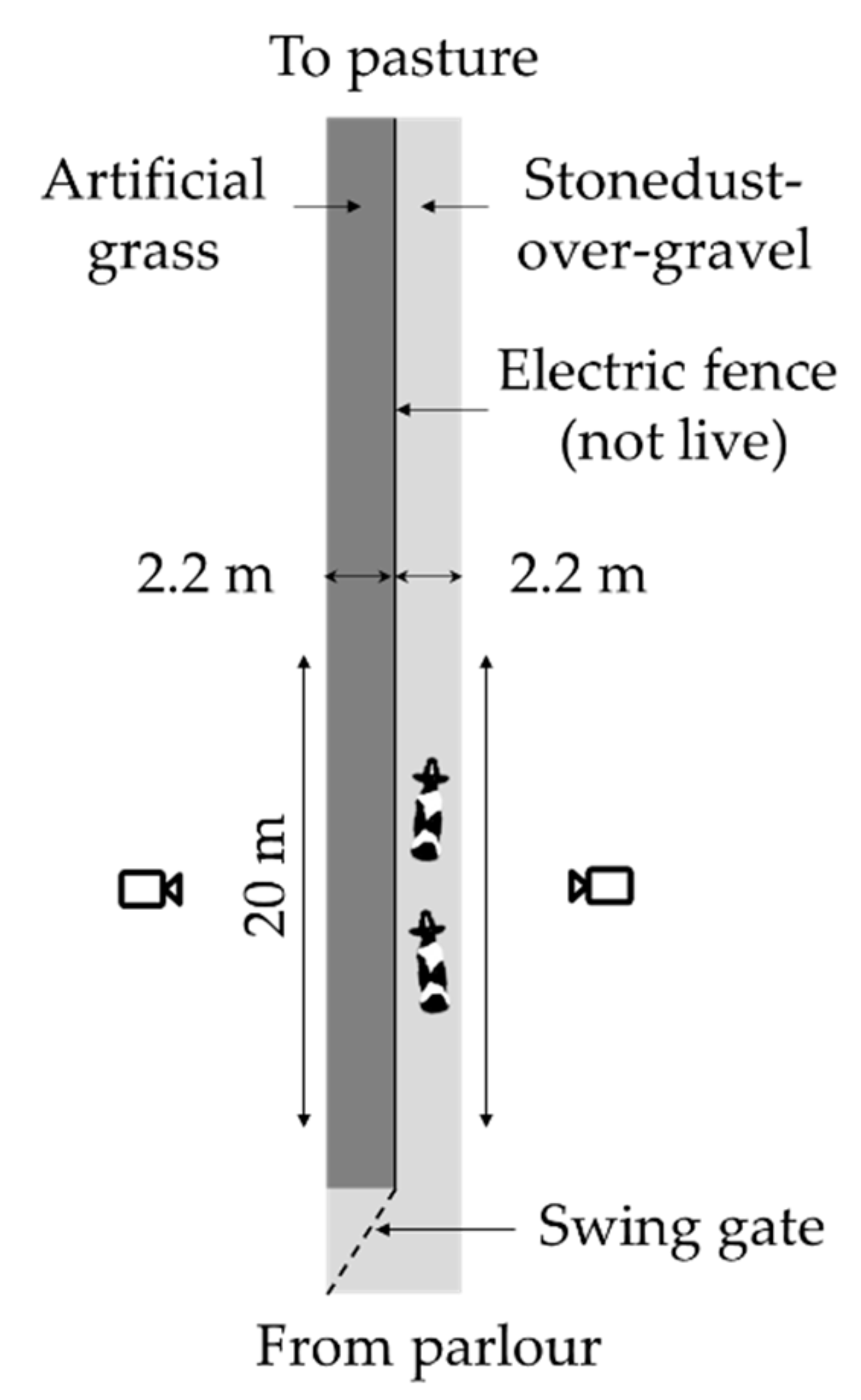
2.1. Forced Trial
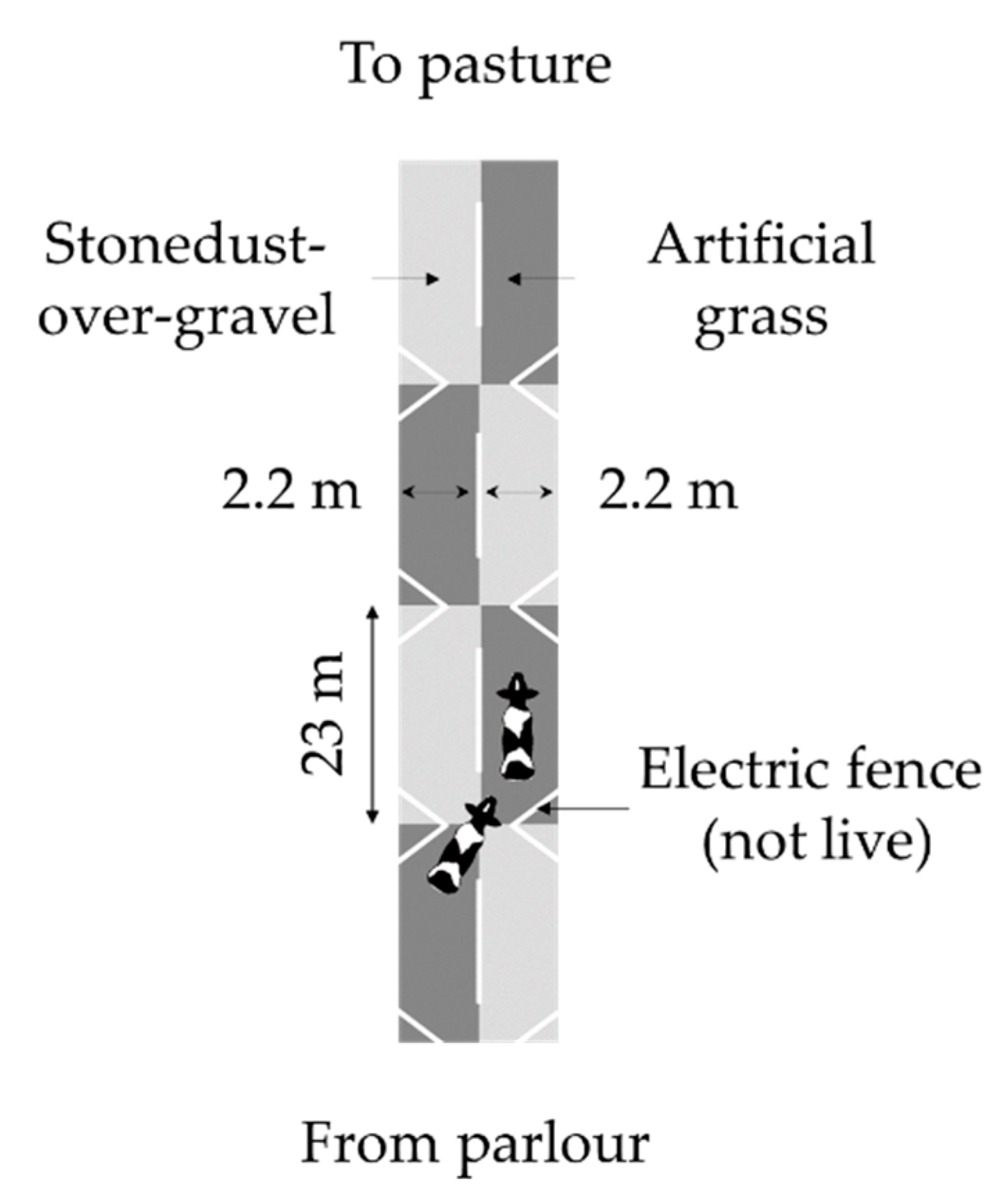
2.2. Preference Trial
3. Results
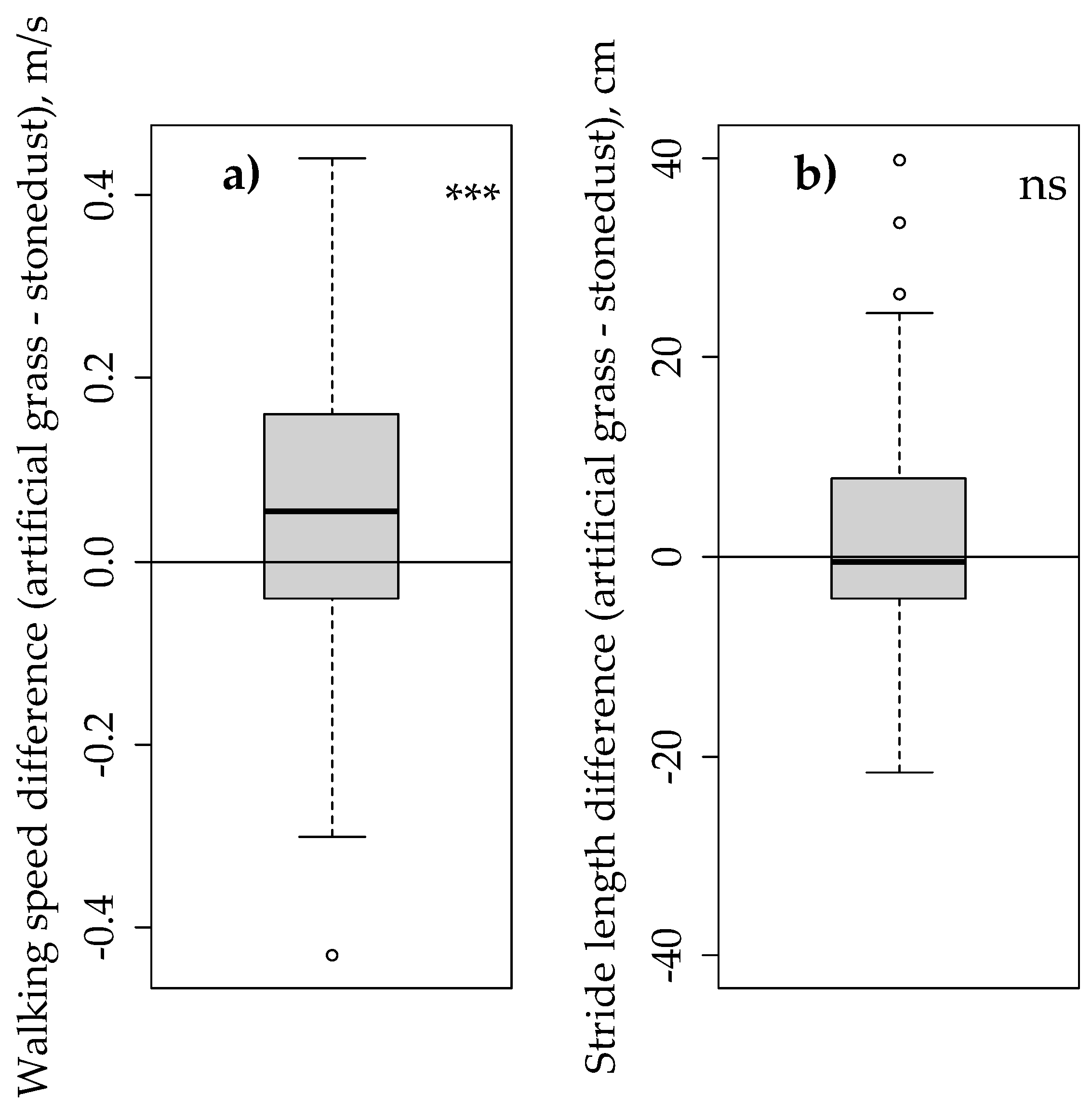
3.1. Forced Trial
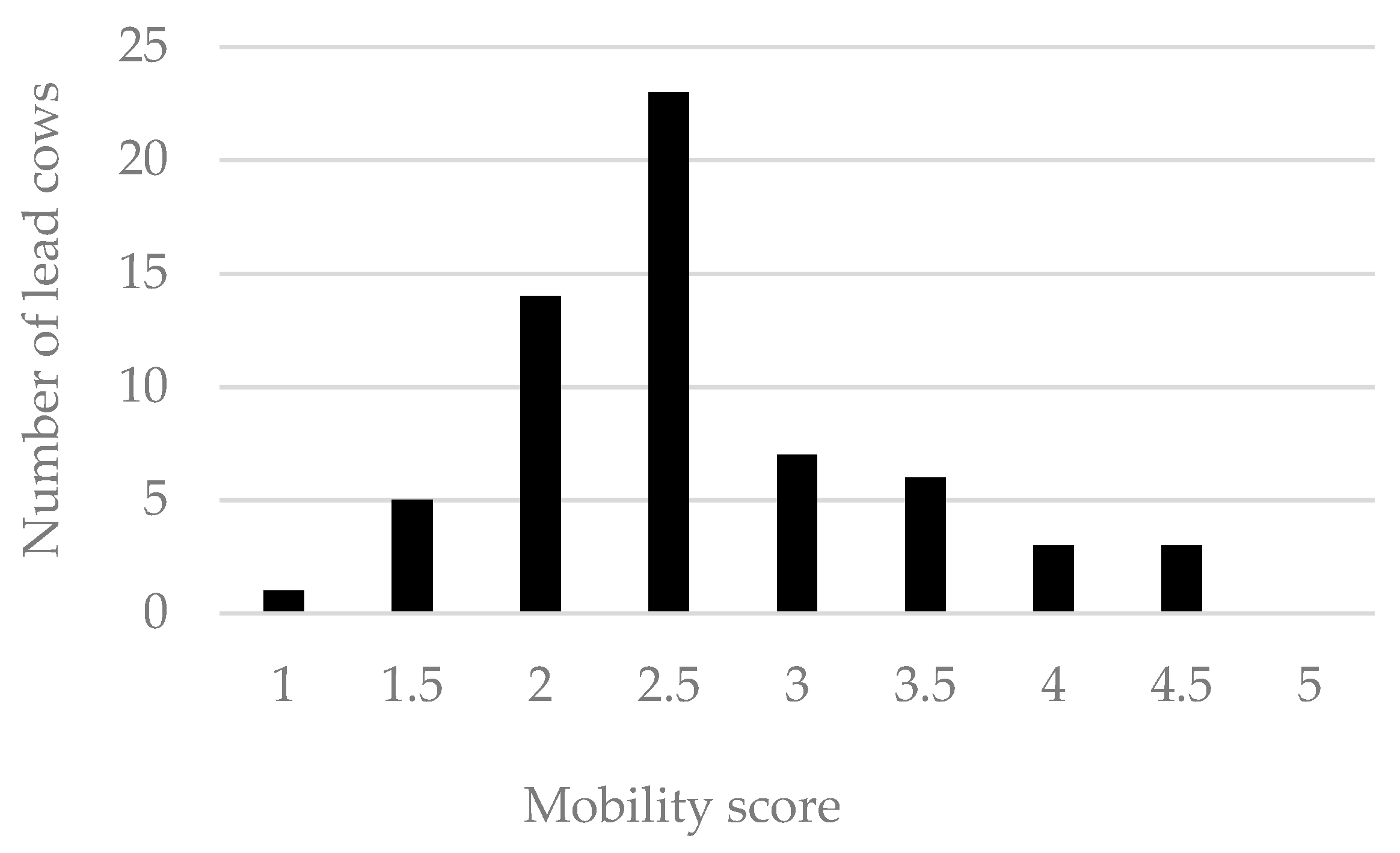
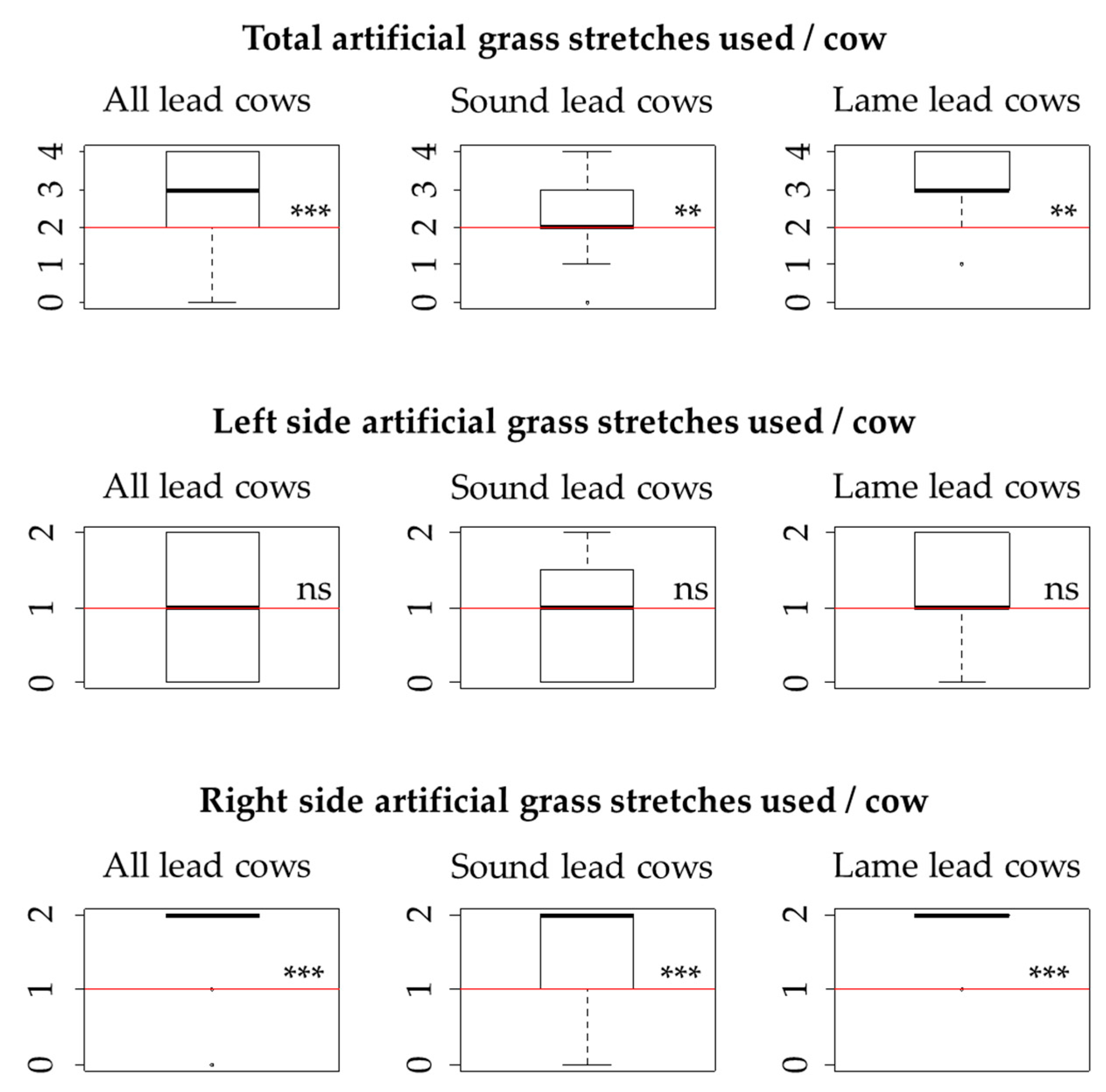
3.2. Preference Trial
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Flower, F.C.; Weary, D.M. Gait assessment in dairy cattle. Animal 2009, 3, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Alsaaod, M.; Huber, S.; Beer, G.; Kohler, P.; Schupbach-Regula, G.; Steiner, A. Locomotion characteristics of dairy cows walking on pasture and the effect of artificial flooring systems on locomotion comfort. J. Dairy Sci. 2017, 100, 8330–8337. [Google Scholar] [CrossRef] [PubMed]
- Telezhenko, E.; Bergsten, C. Influence of floor type on the locomotion of dairy cows. Appl. Anim. Behav. Sci. 2005, 93, 183–197. [Google Scholar] [CrossRef]
- Dyer, R.M.; Neerchal, N.K.; Tasch, U.; Wu, Y.; Dyer, P.; Rajkondawar, P.G. Objective determination of claw pain and its relationship to limb locomotion score in dairy cattle. J. Dairy Sci. 2007, 90, 4592–4602. [Google Scholar] [CrossRef]
- Flower, F.C.; Sanderson, D.J.; Weary, D.M. Hoof pathologies influence kinematic measures of dairy cow gait. J. Dairy Sci. 2005, 88, 3166–3173. [Google Scholar] [CrossRef]
- Flower, F.C.; de Passille, A.M.; Weary, D.M.; Sanderson, D.J.; Rushen, J. Softer, higher-friction flooring improves gait of cows with and without sole ulcers. J. Dairy Sci. 2007, 90, 1235–1242. [Google Scholar] [CrossRef]
- Chapinal, N.; de Passille, A.M.; Pastell, M.; Hanninen, L.; Munksgaard, L.; Rushen, J. Measurement of acceleration while walking as an automated method for gait assessment in dairy cattle. J. Dairy Sci. 2011, 94, 2895–2901. [Google Scholar] [CrossRef]
- Rushen, J.; de Passille, A.M. Effects of roughness and compressibility of flooring on cow locomotion. J. Dairy Sci. 2006, 89, 2965–2972. [Google Scholar] [CrossRef]
- Telezhenko, E.; Magnusson, M.; Bergsten, C. Gait of dairy cows on floors with different slipperiness. J. Dairy Sci. 2017, 100, 6494–6503. [Google Scholar] [CrossRef]
- Phillips, C.J.C.; Morris, I.D. The locomotion of dairy cows on concrete floors that are dry, wet, or covered with a slurry of excreta. J. Dairy Sci. 2000, 83, 1767–1772. [Google Scholar] [CrossRef]
- Phillips, C.J.C.; Morris, I.D. The locomotion of dairy cows on floor surfaces with different frictional properties. J. Dairy Sci. 2001, 84, 623–628. [Google Scholar] [CrossRef]
- Telezhenko, E.; Lidfors, L.; Bergsten, C. Dairy cow preferences for soft or hard flooring when standing or walking. J. Dairy Sci. 2007, 90, 3716–3724. [Google Scholar] [CrossRef] [PubMed]
- Phillips, C.J.C.; Morris, I.D. The ability of cattle to distinguish between, and their preference for, floors with different levels of friction, and their avoidance of floors contaminated with excreta. Anim. Welf. 2002, 11, 21–29. [Google Scholar]
- Flower, F.C.; Sanderson, D.J.; Weary, D.M. Effects of milking on dairy cow gait. J. Dairy Sci. 2006, 89, 2084–2089. [Google Scholar] [CrossRef]
- Flower, F.C.; Weary, D.M. Effect of hoof pathologies on subjective assessments of dairy cow gait. J. Dairy Sci. 2006, 89, 139–146. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017; Available online: https://www.R-project.org/ (accessed on 29 October 2019).
- Manson, F.J.; Leaver, J.D. The influence of concentrate amount on locomotion and clinical lameness in dairy cattle. Anim. Prod. 1988, 47, 185–190. [Google Scholar] [CrossRef]
- Channon, A.J.; Walker, A.M.; Pfau, T.; Sheldon, I.M.; Wilson, A.M. Variability of Manson and Leaver locomotion scores assigned to dairy cows by different observers. Vet. Rec. 2009, 164, 388–392. [Google Scholar] [CrossRef]
- De Haas, E.N.; Lee, C.; Hernandez, C.E.; Naguib, M.; Rodenburg, T.B. Individual differences in personality in laying hens are related to learning a colour cue association. Behav. Process. 2017, 134, 37–42. [Google Scholar] [CrossRef]
- Nawroth, C.; Albuquerque, N.; Savalli, C.; Single, M.S.; McElligott, A.G. Goats prefer positive human emotional facial expressions. R. Soc. Open Sci. 2018, 5, 180491. [Google Scholar] [CrossRef]
- Bergsten, C.; Telezhenko, E.; Ventorp, M. Influence of soft or hard floors before and after first calving on dairy heifer locomotion, claw and leg health. Animals 2015, 5, 662–686. [Google Scholar] [CrossRef]
- Murphy, V.S.; Lowe, D.E.; Lively, F.O.; Gordon, A.W. The impact of floor type on lameness and hoof health of dairy origin bulls. Animal 2018, 12, 2382–2390. [Google Scholar] [CrossRef] [PubMed]
- Vanegas, J.; Overton, M.; Berry, S.L.; Sischo, W.M. Effect of rubber flooring on claw health in lactating dairy cows housed in free-stall barns. J. Dairy Sci. 2006, 89, 4251–4258. [Google Scholar] [CrossRef]
- Bell, N.J.; Huxley, J.N. The use of rubber floor matting on dairy units: A critical review. Cattle Pract. 2009, 17, 142–147. [Google Scholar]
- García, S.C.; Fulkerson, W.J. Opportunities for future Australian dairy systems: A review. Aust. J. Exp. Agric. 2005, 45, 1041–1055. [Google Scholar] [CrossRef]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buijs, S.; Scoley, G.; McConnell, D. Artificial Grass as an Alternative Laneway Surface for Dairy Cows Walking to Pasture. Animals 2019, 9, 891. https://doi.org/10.3390/ani9110891
Buijs S, Scoley G, McConnell D. Artificial Grass as an Alternative Laneway Surface for Dairy Cows Walking to Pasture. Animals. 2019; 9(11):891. https://doi.org/10.3390/ani9110891
Chicago/Turabian StyleBuijs, Stephanie, Gillian Scoley, and Deborah McConnell. 2019. "Artificial Grass as an Alternative Laneway Surface for Dairy Cows Walking to Pasture" Animals 9, no. 11: 891. https://doi.org/10.3390/ani9110891
APA StyleBuijs, S., Scoley, G., & McConnell, D. (2019). Artificial Grass as an Alternative Laneway Surface for Dairy Cows Walking to Pasture. Animals, 9(11), 891. https://doi.org/10.3390/ani9110891