Human Demonstration Does Not Facilitate the Performance of Horses (Equus caballus) in a Spatial Problem-Solving Task


{kind=link}
{kind=link}
{kind=link}
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Subjects and Housing
2.2. Ethical Note
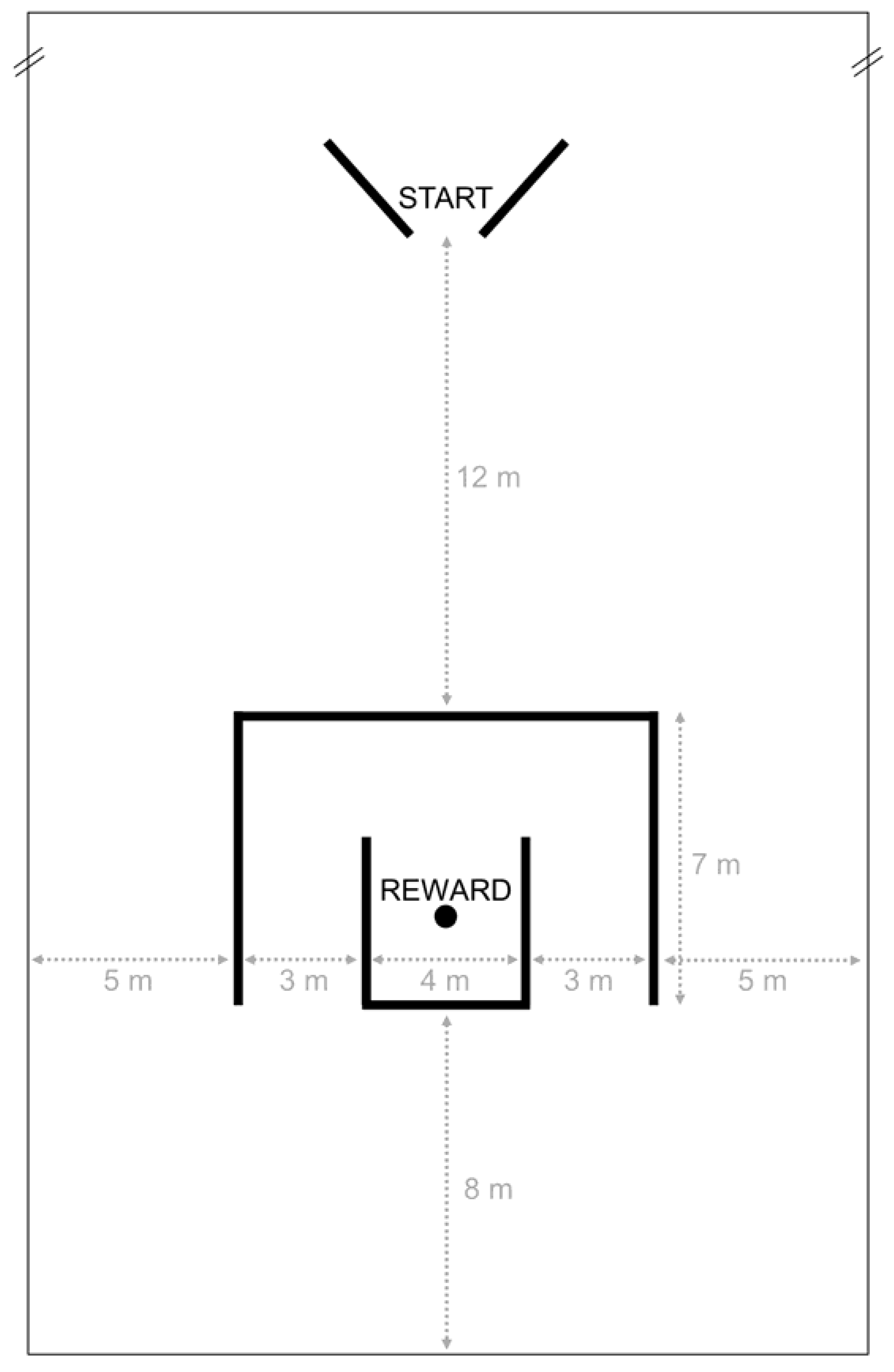
2.3. Experimental Setup
2.4. Training Phase
2.5. Experimental Procedure
- No demonstrator: After releasing the horse at the starting point, the experimenter stepped back sideways behind the cavaletti jumps.
- Human demonstrator: After releasing the horse at the starting point, the experimenter immediately started walking towards the rewarded bucket without further interacting with the horse. As soon as the human demonstrator started moving, the horse was free to solve the detour in its own pace and to choose its own direction, i.e., left or right side of the detour task. The human demonstrator always chose the direction to the right of the barriers and reached the rewarded bucket within an approximate latency of 30 s.
2.6. Data Recording and Analysis
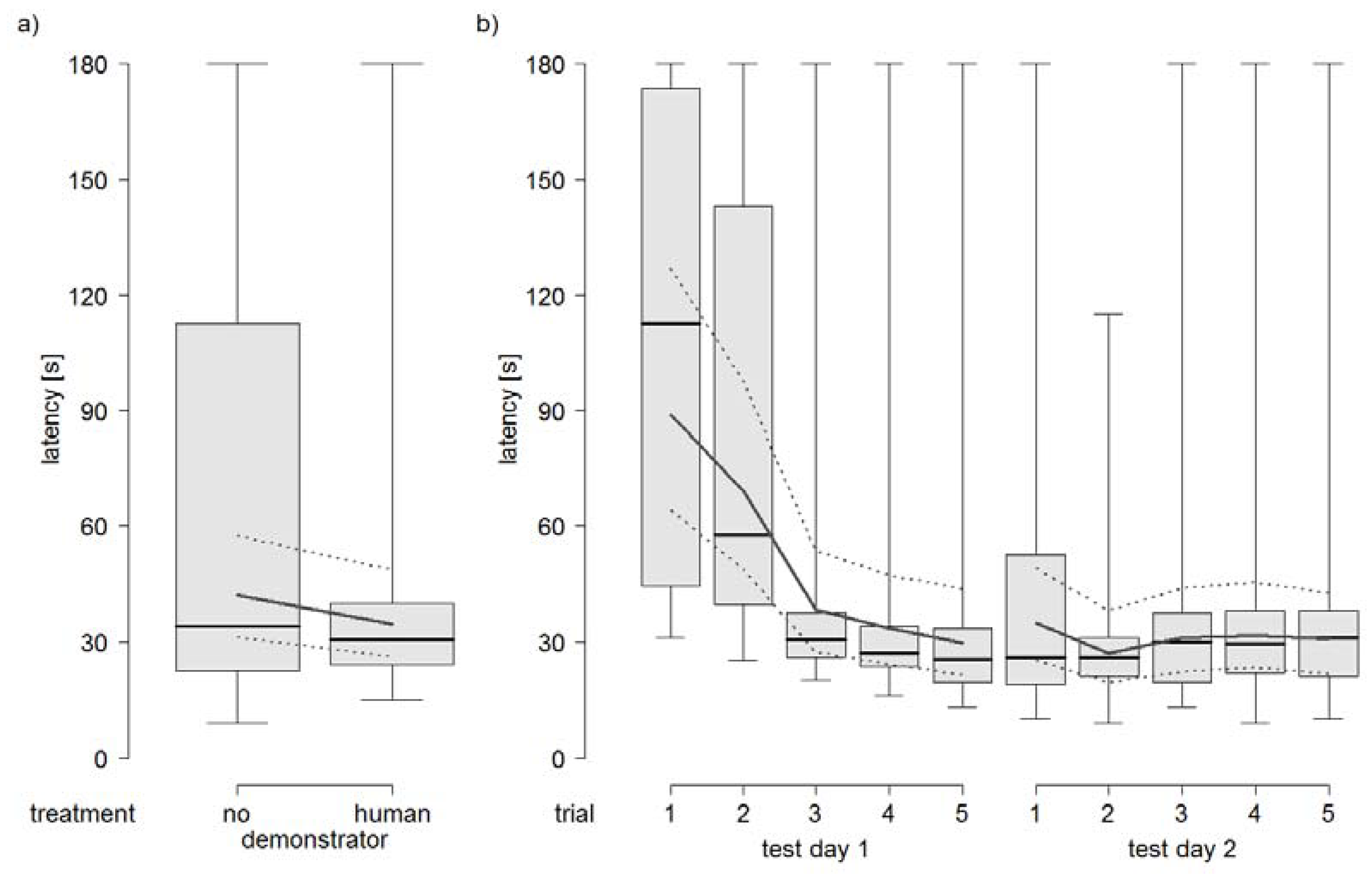
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mills, D.; McDonnell, S.M. The Domestic Horse: The Evolution, Development and Management of Its Behaviour; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- McGreevy, P. Equine Behavior: A Guide for Veterinarians and Equine Scientists; Saunders Limited: London, UK, 2004. [Google Scholar]
- Nicol, C. Equine learning: Progress and suggestions for future research. Appl. Anim. Behav. Sci. 2002, 78, 193–208. [Google Scholar] [CrossRef]
- McCall, C.A. A Review of Learning Behavior in Horses and Its Application in Horse Training. J. Anim. Sci. 1990, 68, 75–81. [Google Scholar] [CrossRef]
- Schuetz, A.; Farmer, K.; Krueger, K. Social learning across species: Horses (Equus caballus) learn from humans by observation. Anim. Cogn. 2017, 20, 567–573. [Google Scholar] [CrossRef] [PubMed]
- McGreevy, P.D.; Oddie, C.; Burton, F.L.; McLean, A.N. The horse–human dyad: Can we align horse training and handling activities with the equid social ethogram? Vet. J. 2009, 181, 12–18. [Google Scholar] [CrossRef] [PubMed]
- Heyes, C.M. Social Learning in Animals: Categories and Mechanisms. Biol. Rev. 1994, 69, 207–231. [Google Scholar] [CrossRef] [PubMed]
- Galef, B.G.; Laland, K.N. Social Learning in Animals: Empirical Studies and Theoretical Models. Bioscience 2005, 55, 489–499. [Google Scholar] [CrossRef]
- Ahrendt, L.P.; Christensen, J.W.; Ladewig, J. The ability of horses to learn an instrumental task through social observation. Appl. Anim. Behav. Sci. 2012, 139, 105–113. [Google Scholar] [CrossRef]
- Rørvang, M.V.; Ahrendt, L.P.; Christensen, J.W. Horses fail to use social learning when solving spatial detour tasks. Anim. Cogn. 2015, 18, 847–854. [Google Scholar] [CrossRef] [PubMed]
- Costa, E.D.; Allegrini, M.; Cerri, E.; Minero, M. Social learning in horses: Does the demonstration of a conspecific affect the ability to solve a detour task? J. Vet. Behav. Clin. Appl. Res. 2013, 8, e5. [Google Scholar] [CrossRef]
- Krueger, K.; Farmer, K.; Heinze, J. The effects of age, rank and neophobia on social learning in horses. Anim. Cogn. 2014, 17, 645–655. [Google Scholar] [CrossRef] [PubMed]
- Krueger, K.; Heinze, J. Horse sense: Social status of horses (Equus caballus) affects their likelihood of copying other horses’ behavior. Anim. Cogn. 2008, 11, 431–439. [Google Scholar] [CrossRef] [PubMed]
- Nicol, C. How animals learn from each other. Appl. Anim. Behav. Sci. 2006, 100, 58–63. [Google Scholar] [CrossRef]
- Dawson, E.H.; Chittka, L. Conspecific and heterospecific information use in bumblebees. PLoS ONE 2012, 7, e31444. [Google Scholar] [CrossRef] [PubMed]
- Miklósi, Á.; Kubinyi, E.; Topál, J.; Gácsi, M.; Virányi, Z.; Csányi, V. A simple reason for a big difference: Wolves do not look back at humans, but dogs do. Curr. Biol. 2003, 13, 763–766. [Google Scholar] [CrossRef]
- Reid, P.J. Adapting to the human world: Dogs’ responsiveness to our social cues. Behav. Processes 2009, 80, 325–333. [Google Scholar] [CrossRef] [PubMed]
- Hernádi, A.; Kis, A.; Turcsán, B.; Topál, J. Man’s underground best friend: Domestic ferrets, unlike the wild forms, show evidence of dog-like social-cognitive skills. PLoS ONE 2012, 7, e43267. [Google Scholar] [CrossRef] [PubMed]
- Pongrácz, P.; Miklosi, A.; Kubinyi, E.; Gurobi, K.; Topal, J.; Csányi, V. Social learning in dogs: The effect of a human demonstrator on the performance of dogs in a detour task. Anim. Behav. 2001, 62, 1109–1117. [Google Scholar] [CrossRef]
- Nawroth, C.; Baciadonna, L.; McElligott, A.G. Goats learn socially from humans in a spatial problem-solving task. Anim. Behav. 2016, 121, 123–129. [Google Scholar] [CrossRef]
- Pongrácz, P.; Vida, V.; Bánhegyi, P.; Miklósi, Á. How does dominance rank status affect individual and social learning performance in the dog (Canis familiaris)? Anim. Cogn. 2007, 11, 75–82. [Google Scholar] [CrossRef] [PubMed]
- Mersmann, D.; Tomasello, M.; Call, J.; Kaminski, J.; Taborsky, M. Simple Mechanisms Can Explain Social Learning in Domestic Dogs (Canis familiaris). Ethology 2011, 117, 675–690. [Google Scholar] [CrossRef]
- Osthaus, B.; Proops, L.; Hocking, I.; Burden, F. Spatial cognition and perseveration by horses, donkeys and mules in a simple A-not-B detour task. Anim. Cogn. 2013, 16, 301–305. [Google Scholar] [CrossRef] [PubMed]
- Baragli, P.; Vitale, V.; Paoletti, E.; Sighieri, C.; Reddon, A. Detour behaviour in horses (Equus caballus). J. Ethol. 2011, 29, 227–234. [Google Scholar] [CrossRef]
- Baragli, P.; Vitale, V.; Sighieri, C.; Lanata, A.; Palagi, E.; Reddon, A.R. Consistency and flexibility in solving spatial tasks: Different horses show different cognitive styles. Sci. Rep. 2017, 7, 16557. [Google Scholar] [CrossRef] [PubMed]
- Association for the Study of Animal Behaviour. Guidelines for the treatment of animals in behavioural research and teaching. Anim. Behav. 2016, 111, 1–9. [Google Scholar] [CrossRef]
- FSVO Federal Food Safety and Veterinary Office Switzerland. Animal Welfare Act (TSchG 455); FSVO Federal Food Safety and Veterinary Office Switzerland: Bern, Switzerland, 2005. [Google Scholar]
- FSVO Federal Food Safety and Veterinary Office Switzerland. Animal Welfare Ordinance (TSchV 455.1); FSVO Federal Food Safety and Veterinary Office Switzerland: Bern, Switzerland, 2008. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2017. [Google Scholar]
- Bates, D.; Mächler, M.; Bolker, B.; Walker, S. Fitting Linear Mixed-Effects Models Using lme4. J. Stat. Softw. 2015, 67, 1–48. [Google Scholar] [CrossRef]
- Proops, L.; Walton, M.; McComb, K. The use of human-given cues by domestic horses, Equus caballus, during an object choice task. Anim. Behav. 2010, 79, 1205–1209. [Google Scholar] [CrossRef]
- Proops, L.; McComb, K. Attributing attention: The use of human-given cues by domestic horses (Equus caballus). Anim. Cogn. 2010, 13, 197–205. [Google Scholar] [CrossRef] [PubMed]
- Krueger, K.; Flauger, B.; Farmer, K.; Maros, K. Horses (Equus caballus) use human local enhancement cues and adjust to human attention. Anim. Cogn. 2011, 14, 187–201. [Google Scholar] [CrossRef] [PubMed]
- Smith, A.V.; Proops, L.; Grounds, K.; Wathan, J.; McComb, K. Functionally relevant responses to human facial expressions of emotion in the domestic horse (Equus caballus). Biol. Lett. 2016, 12, 20150907. [Google Scholar] [CrossRef] [PubMed]
- Baciadonna, L.; McElligott, A.G.; Briefer, E.F. Goats favour personal over social information in an experimental foraging task. PeerJ 2013, 1, e172. [Google Scholar] [CrossRef] [PubMed]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burla, J.-B.; Siegwart, J.; Nawroth, C. Human Demonstration Does Not Facilitate the Performance of Horses (Equus caballus) in a Spatial Problem-Solving Task. Animals 2018, 8, 96. https://doi.org/10.3390/ani8060096
Burla J-B, Siegwart J, Nawroth C. Human Demonstration Does Not Facilitate the Performance of Horses (Equus caballus) in a Spatial Problem-Solving Task. Animals. 2018; 8(6):96. https://doi.org/10.3390/ani8060096
Chicago/Turabian StyleBurla, Joan-Bryce, Janina Siegwart, and Christian Nawroth. 2018. "Human Demonstration Does Not Facilitate the Performance of Horses (Equus caballus) in a Spatial Problem-Solving Task" Animals 8, no. 6: 96. https://doi.org/10.3390/ani8060096
APA StyleBurla, J.-B., Siegwart, J., & Nawroth, C. (2018). Human Demonstration Does Not Facilitate the Performance of Horses (Equus caballus) in a Spatial Problem-Solving Task. Animals, 8(6), 96. https://doi.org/10.3390/ani8060096