1. Introduction
The poultry industry growth continues skyrocketing globally, concurrent with the world population surge and the resultant overwhelming demands for ample, nutritious, and affordable protein sources. Meanwhile, this industry is struggling to create an ecosystem that would ensure sustainability and growth by reducing poultry production losses due to health and welfare issues, creating feasible livestock environments through precision technologies, and alleviating labor shortages in giant poultry markets, such as the USA [
1].
Welfare plays a commendable role in rendering qualitatively healthy and quantitatively superior poultry productions [
2]. Fundamentally, it is a multifaceted phenomenon that demonstrates chickens’ physical conditions, living habitat feasibility, and mental situations. Birds require spacious environments to move with ease, access free feed and water sources, and socialize, while inhibiting infections, lameness, and stress throughout the rearing period. In this context, mobility tremendously affects individual birds’ welfare levels [
3]. Impaired or zero locomotion in birds may indicate issues such as insufficient nutrient consumption needed for growth, possible existing pain or stress, lameness, housing constraints, and even mortality. Hence, impaired locomotion has been highly identified in about 15–28% of birds in poultry farms [
4]. Hence, mobility or locomotion studies play an important role in shedding light on the conditions that are effective factors for determining individual and flock-level welfare in birds.
The traditional Gait Scoring (GS) and Kinematics (GK) methods have been widely applied to assess locomotion status in individual chickens [
5]. While the former method needs to be carried out by an expert tasked to observe and determine gait level one chicken at a time, the latter method utilizes statistical and algorithmic approaches to extract locomotion features, like walking ability, sitting, and standing postures, and correlates them with the predefined GS levels. As in the works of Aydin, Periera et al., and Doornweerd et al. [
6,
7,
8], such features of individual birds are studied and correlated with their predetermined GS levels. Their results are influential in determining major lameness and locomotion problems in individual broilers. Due to welfare management urgency, it is more effective to provide timely, conclusive, subjective, and economical insights into the overall activities of individuals and flocks day in and day out.
On the other hand, several alternative artificial intelligence (AI) and/or Deep Learning (DL) methods have been proposed to tackle the locomotion problem and provide further information on other activities of chickens. The authors Nasiri et al., Fang et al., and de Alencar Nääs et al. [
9,
10,
11] have developed very effective pose estimation and speed-based lameness and behavior detection methodologies using DL models. They have achieved high accuracies in correlating lameness GS levels and behavior classifications with broilers’ skeletal positions and visual analysis, but we still need highly generalizable and practical methods in labs and commercial poultry farms; for instance, cameras used here capture lateral images of flocks, which greatly reduces the analyzability of individual chickens. Lin et al. and Fang et al. [
12,
13] have applied a Convolutional Neural Network (CNN)-based DL model to detect individual chickens in a shallow setup; consequently, their movements were calculated manually matching consecutive frames. In the work of Neethirajan [
14], a CNN-based YOLOv5 model along with a deep sort algorithm were applied to track individual birds’ trajectories and provide periodical movements. Although the study provided flock-level movement orientations, a detailed approach is more helpful in solving the occlusion problem and the consequent individual bird movement and identification issues. These studies are hardly generalizable to broiler farms where constant occlusions happen. Continuously tracking individual bird trajectories and flock-level commotions are thoroughly complicated. The utilization of large hierarchical datasets that would encompass different broiler growth phases and render a less biased DL model would also be crucial in such applications. Additionally, DL has been mostly applied in image classification tasks, as depicted in the previous works. The efficacy of DL models in image segmentation and object detection tasks is yet to be discovered.
Generally, the inadequacies in the quantity of data for developing DL models and the persistence of the occlusion-related identification problems greatly inhibit clear calculations of the individual birds’ trajectories. On the other hand, to achieve economically beneficial and effective applications, one needs to consider the processing time, human resource requirement, and the inherent objectivity of the results. Henceforth, we aimed to tackle the mobility estimation of broilers while handling the occlusion instances, developing a more generalizable and robust model, i.e., the YOLOv5 deep sort model, and a new algorithm for large poultry farms while utilizing large datasets for DL model development. YOLOv5 is a vastly applied object detection DL model for computer vision. It is one of the most advanced versions of the YOLO family, surpassing older YOLO versions in terms of object detection precision. The YOLO models are primarily designed to perform object localization and classification in a single-stage regression process, thus outperforming counterpart CNN-based models, such as faster region-based or mask CNN, in terms of inference speed and memory efficiency, as well as provide comparable precision levels. Therefore, it is deemed one of the most effective models for real-time applications [
15]. Meanwhile, the deep sort algorithm has been widely applied for the continuous tracking of detected objects. It is a robust algorithm that is convenient for real-time applications thanks to its fast run time speed of 20-30 frames per second (FPS) [
16]. Overall, the objectives of this study were to utilize SSL for bringing more data into DL model development, add a new algorithm on top of the deep sort algorithm for solving the trajectory estimation and activity levels of individual broilers, and estimate flock level mobility.
2. Materials and Methods
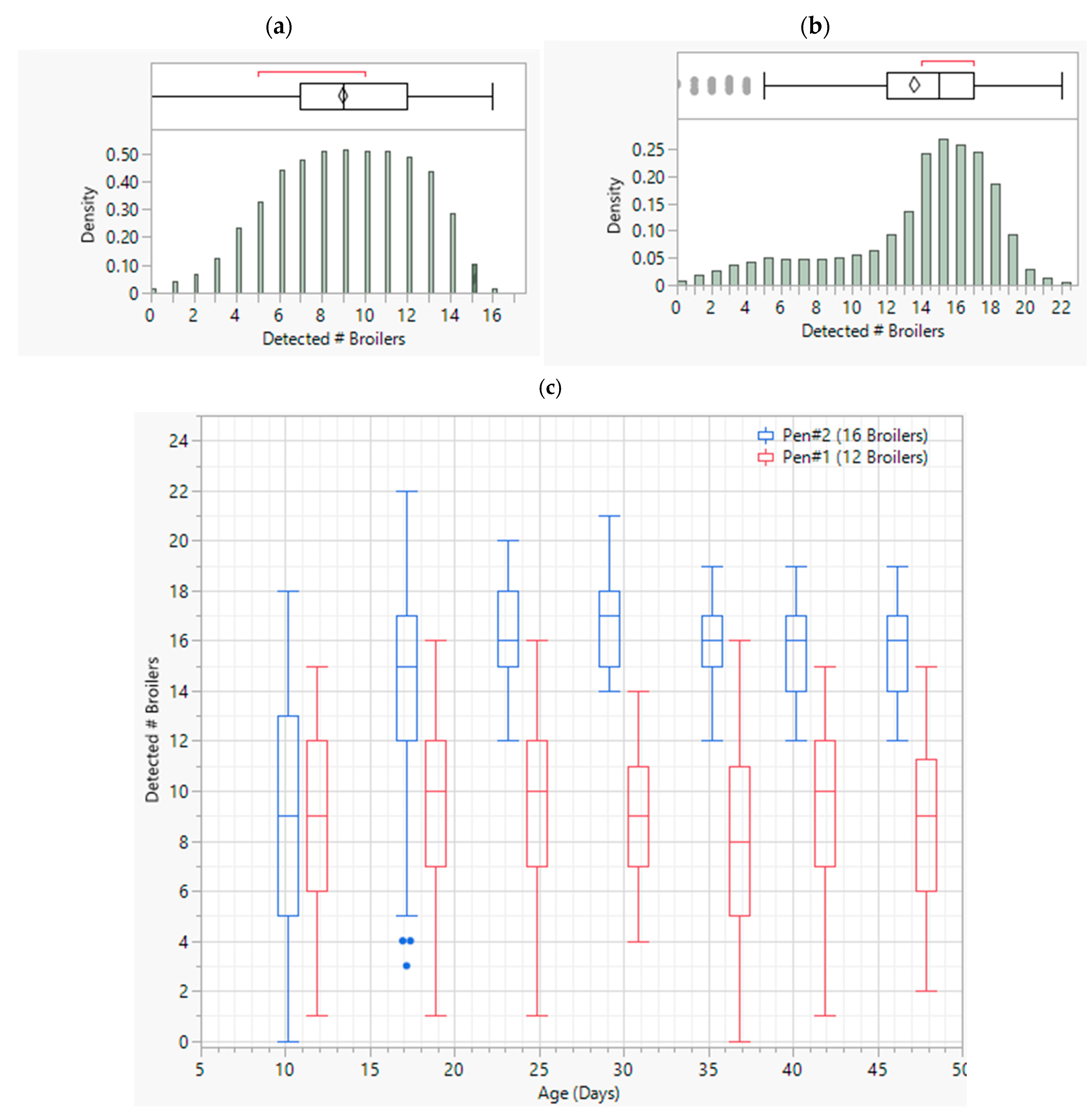
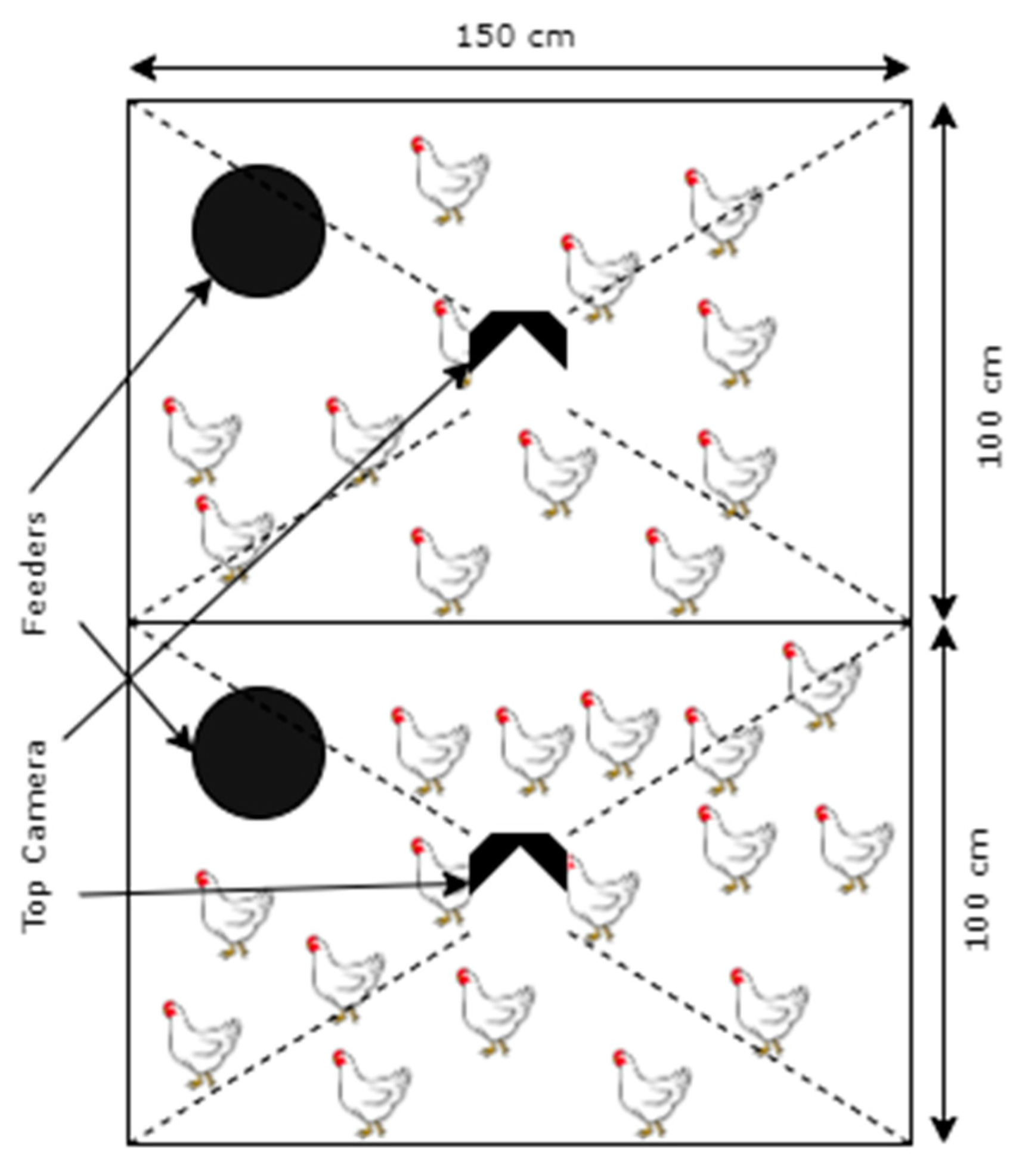
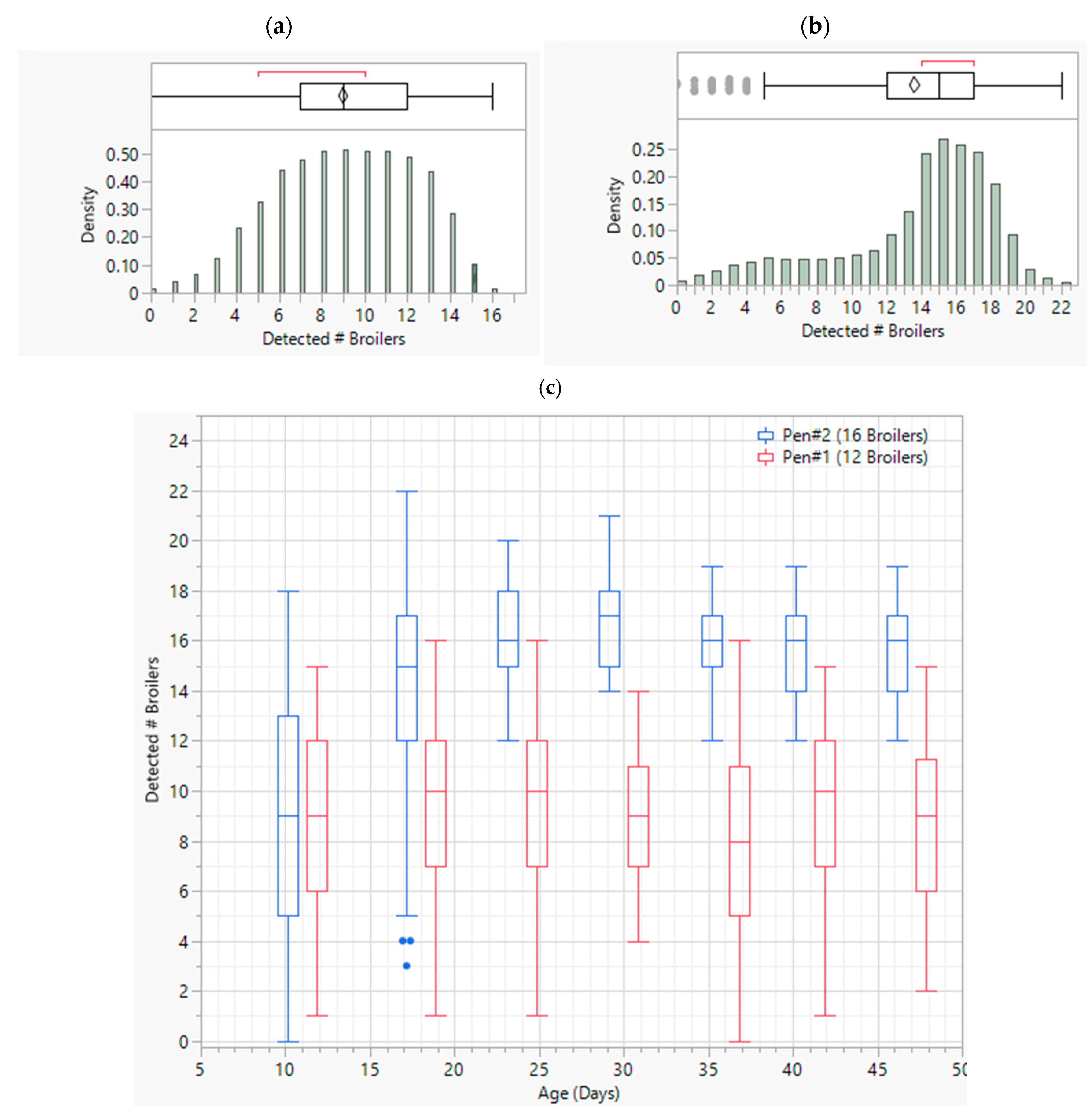
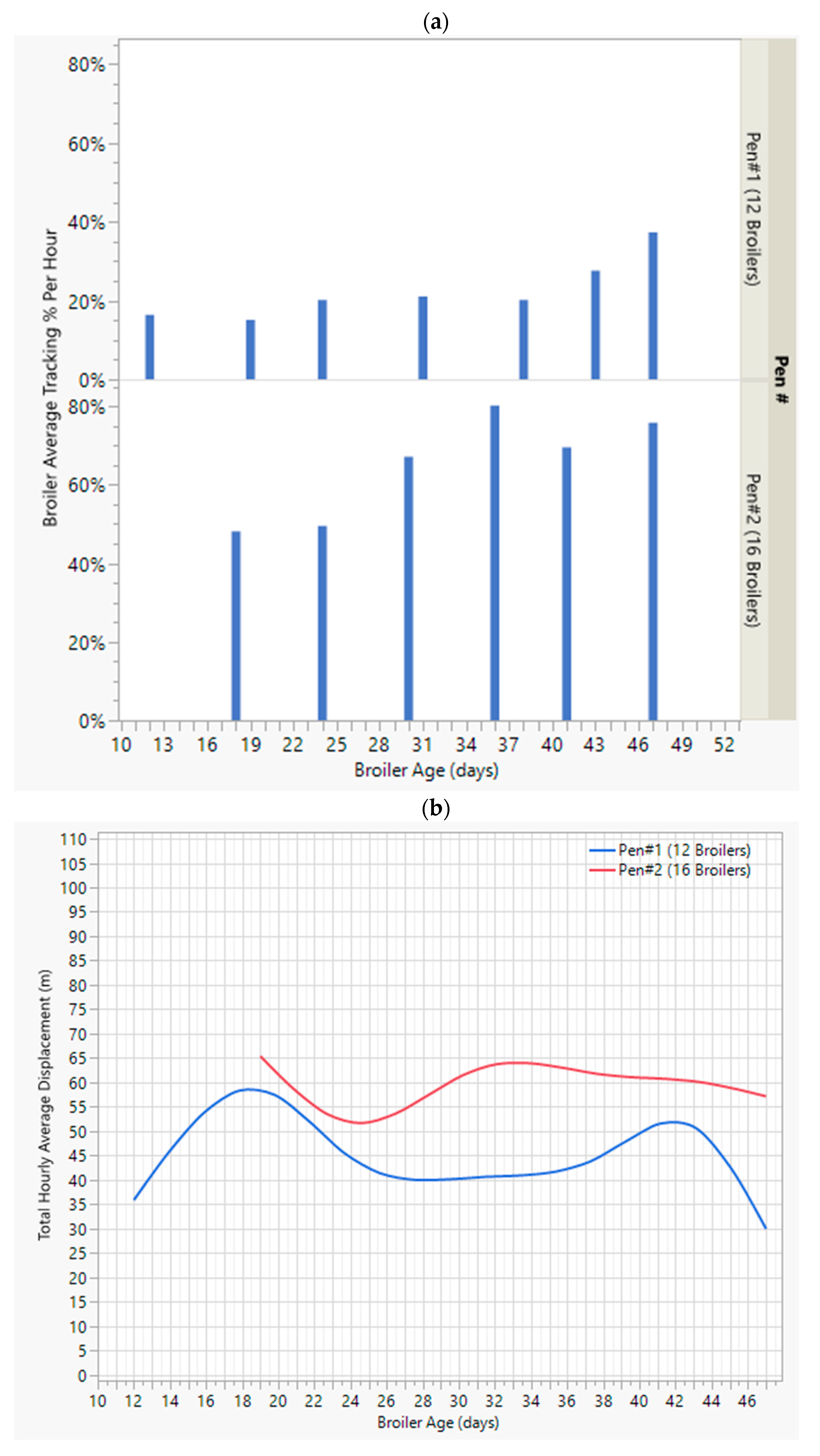
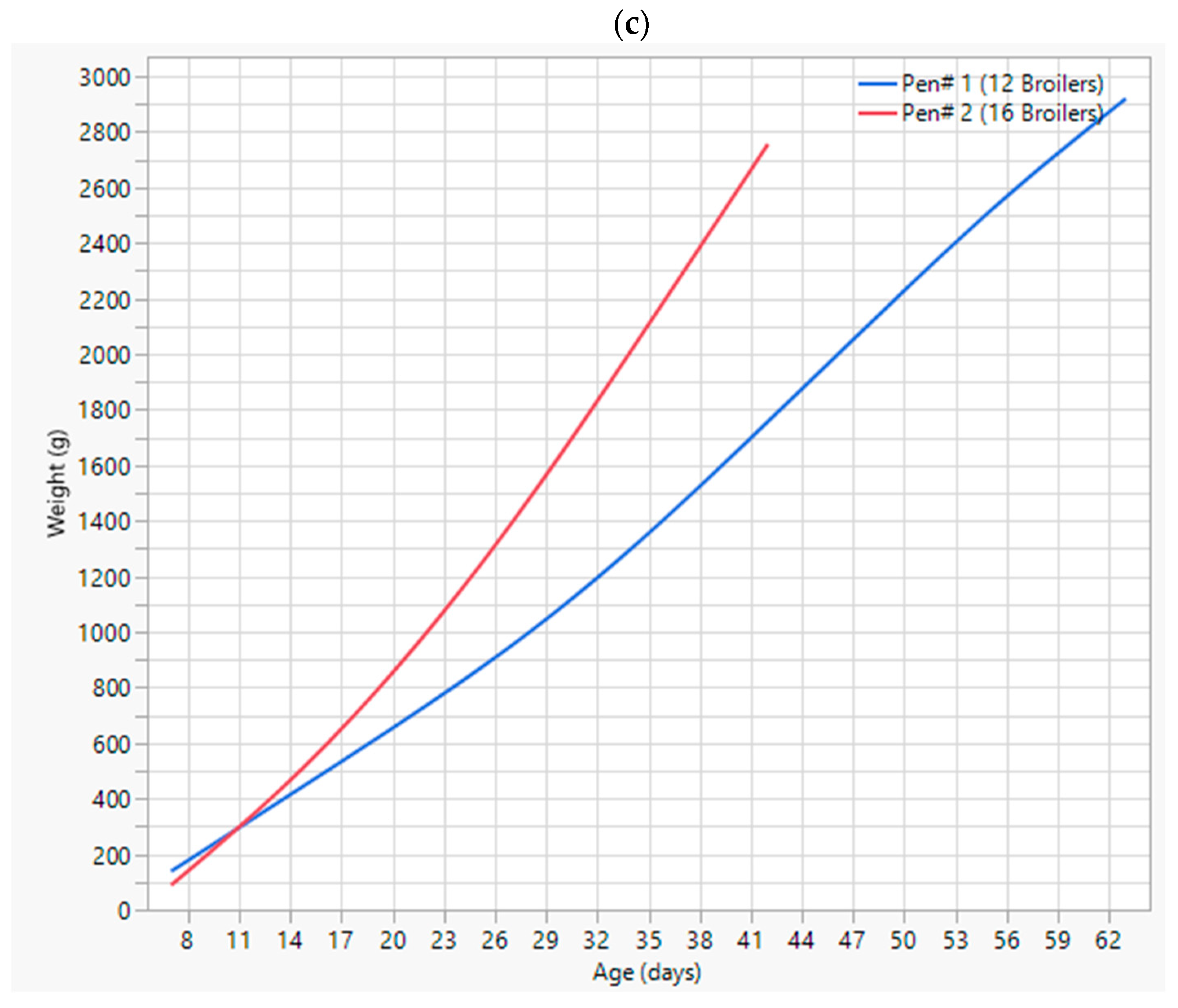
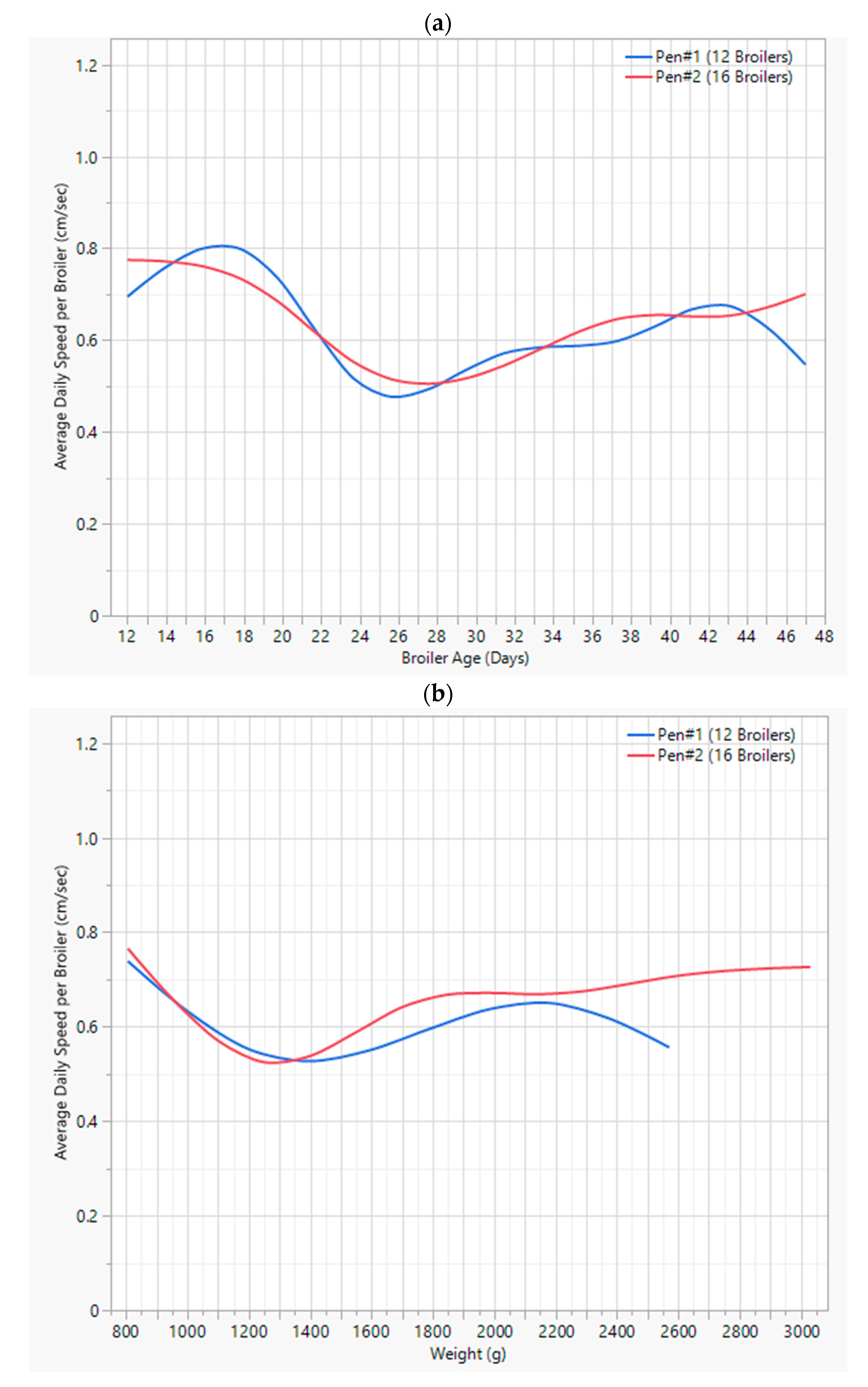
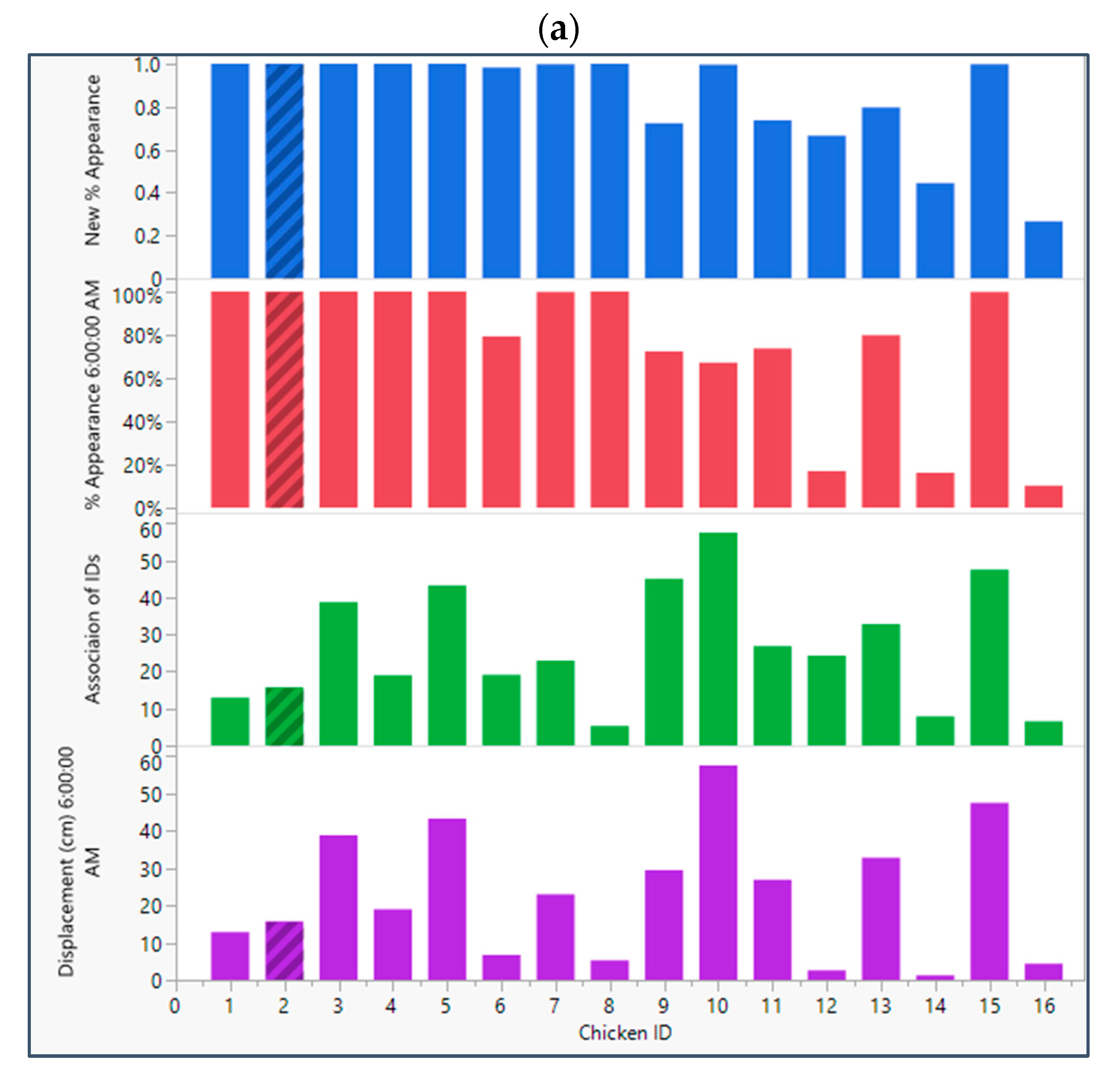
The experiment was carried out in the Animal Science Department labs located in the Johnson Animal Research and Teaching Unit (JARTU), the University of Tennessee Knoxville, USA. It consisted of 28 chickens (Cobb 700, with a 1:1 male–female ratio) that were reared for a period of 54 days between October 18 and December 10, 2021. Day-old chicks were divided into 2 pens with 12 and 16 birds, respectively. We used birds at two growth rates: slow growing (<50 g/day) and standard (>65 g/day). Both groups of birds were reared under typical stocking densities, i.e., 24 kg/m2 for slow growing and 32 kg/m2 for standard, which translated to 12 birds/pen for slow-growing and 16 birds/pen for standard birds.
Each pen had a 100 cm × 150 cm pen with a standard camera (Amcrest UltraHD 5MP Outdoor POE Camera 2592 × 1944p) mounted at a 3 m height overlooking the pen, as depicted in
Figure 1. The cameras recorded broiler movements continuously for 15 min per hour for 24 h. The 15 min period, i.e., the first quarter of every hour, was deemed statistically significant to represent the total mobility level of birds in an hour [
17]. Additionally, it helped in effectively using computer storage while acquiring ample data for DL model development and mobility analysis. This setup collected data for 54 days continuously, encompassing the total life span of the broilers before they were moved to slaughterhouses at around 3 kg in weight. The video recordings were stored in standard hard drives for future analysis.
2.1. Semi-Supervised Learning
With time and human resource constraints, semi-supervised learning (SSL) is an influential method in tackling big datasets for DL model development. It lies between the supervised and unsupervised learning counterparts, benefiting from their respective strengths. SSL utilizes the guided learning procedure, i.e., learning from labeled datasets, the former method, and the unguided methodology, i.e., predicting and learning simultaneously from unlabeled datasets in the latter one [
18,
19].
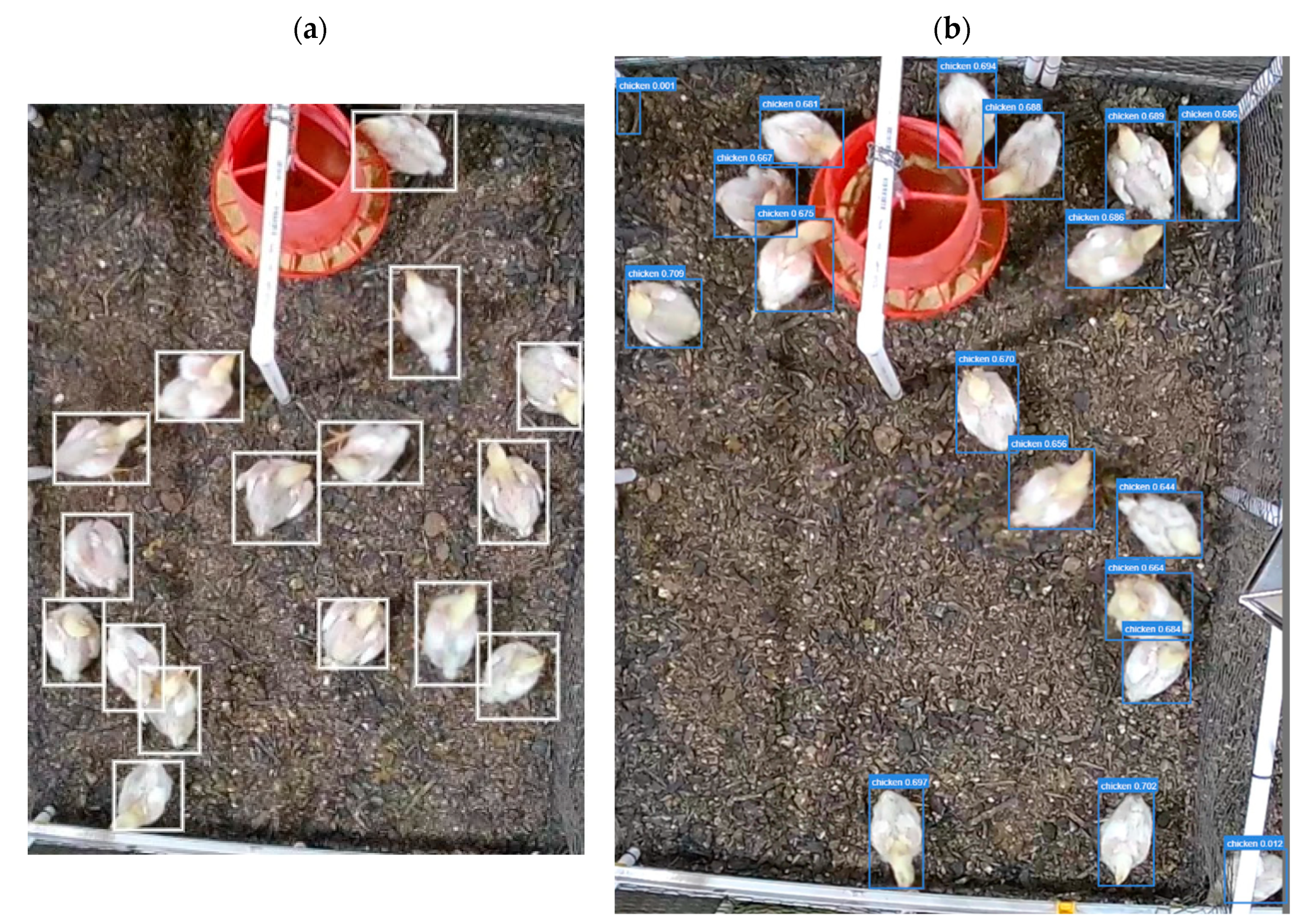
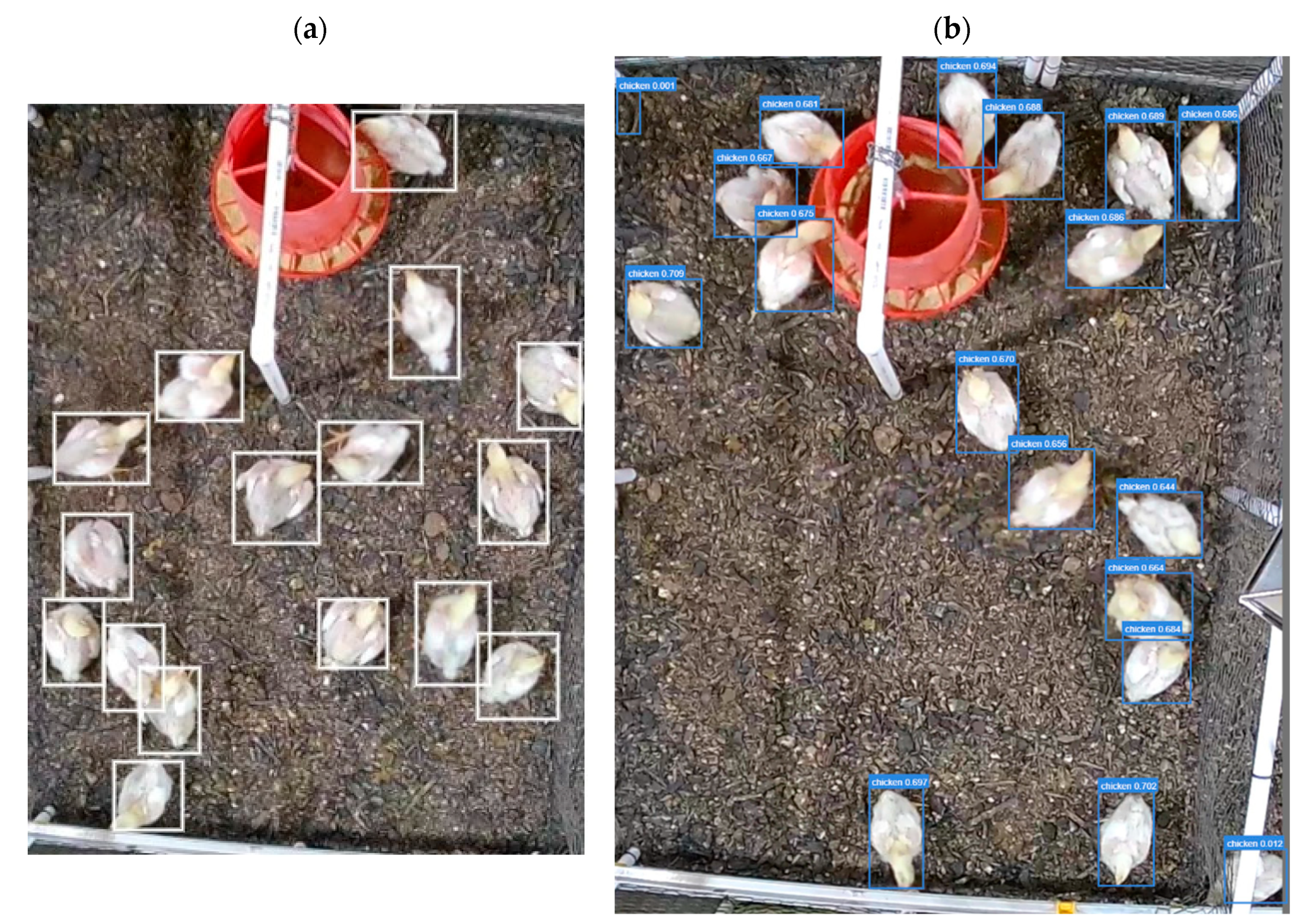
In this study, firstly, to develop the initial YOLOv5 model, we employed a dataset with 1650 labeled images extracted from the recordings of 5 random days. The video recordings when the broilers were 7, 17, 26, 36, and 41 days of age have been used to build this dataset. Consequently, with a ratio of 1 frame per minute, images were extracted from them; this ratio was chosen so that we obtained images that were temporally further away from one another to reflect different possible positions of the broilers in the pens.
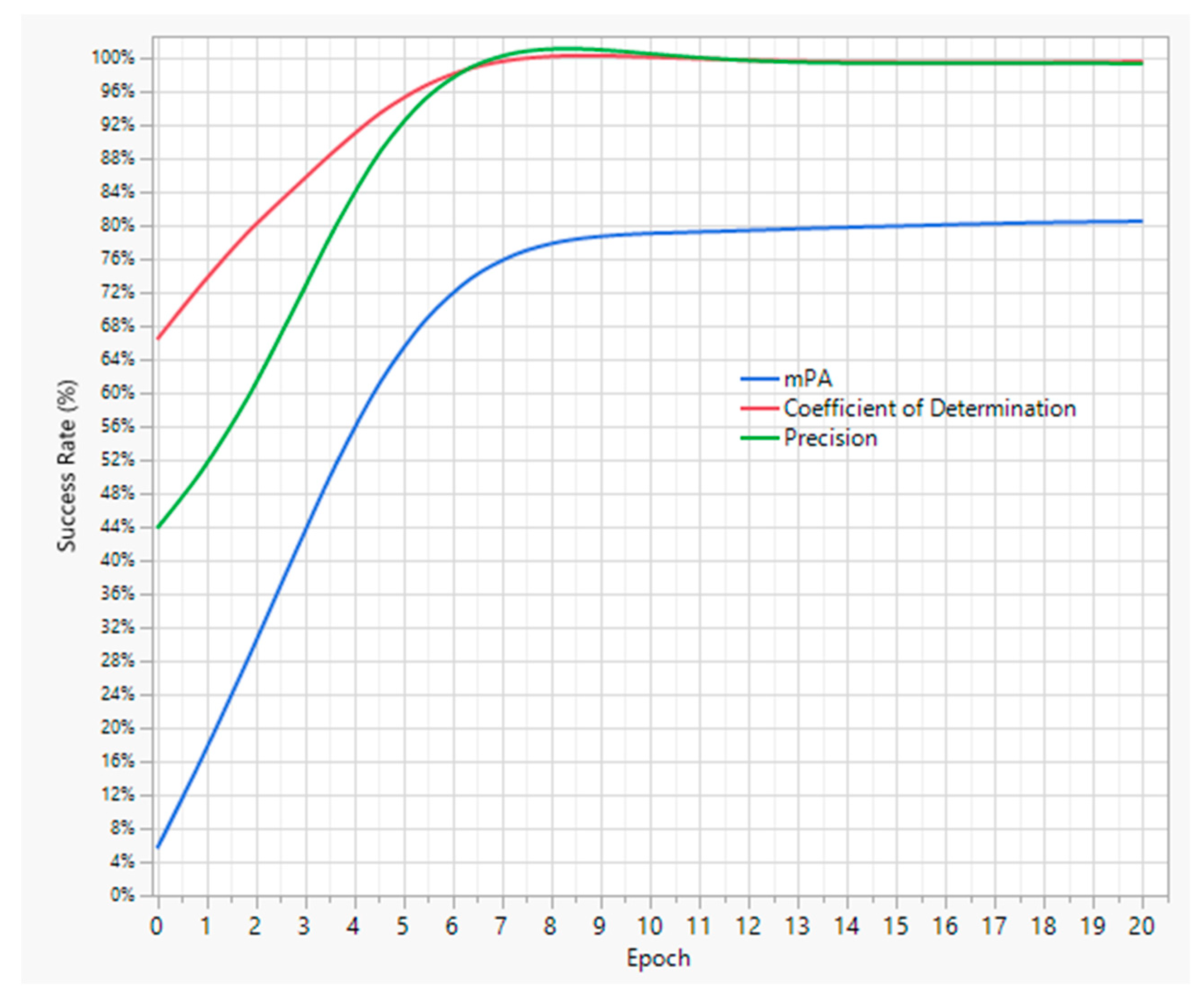
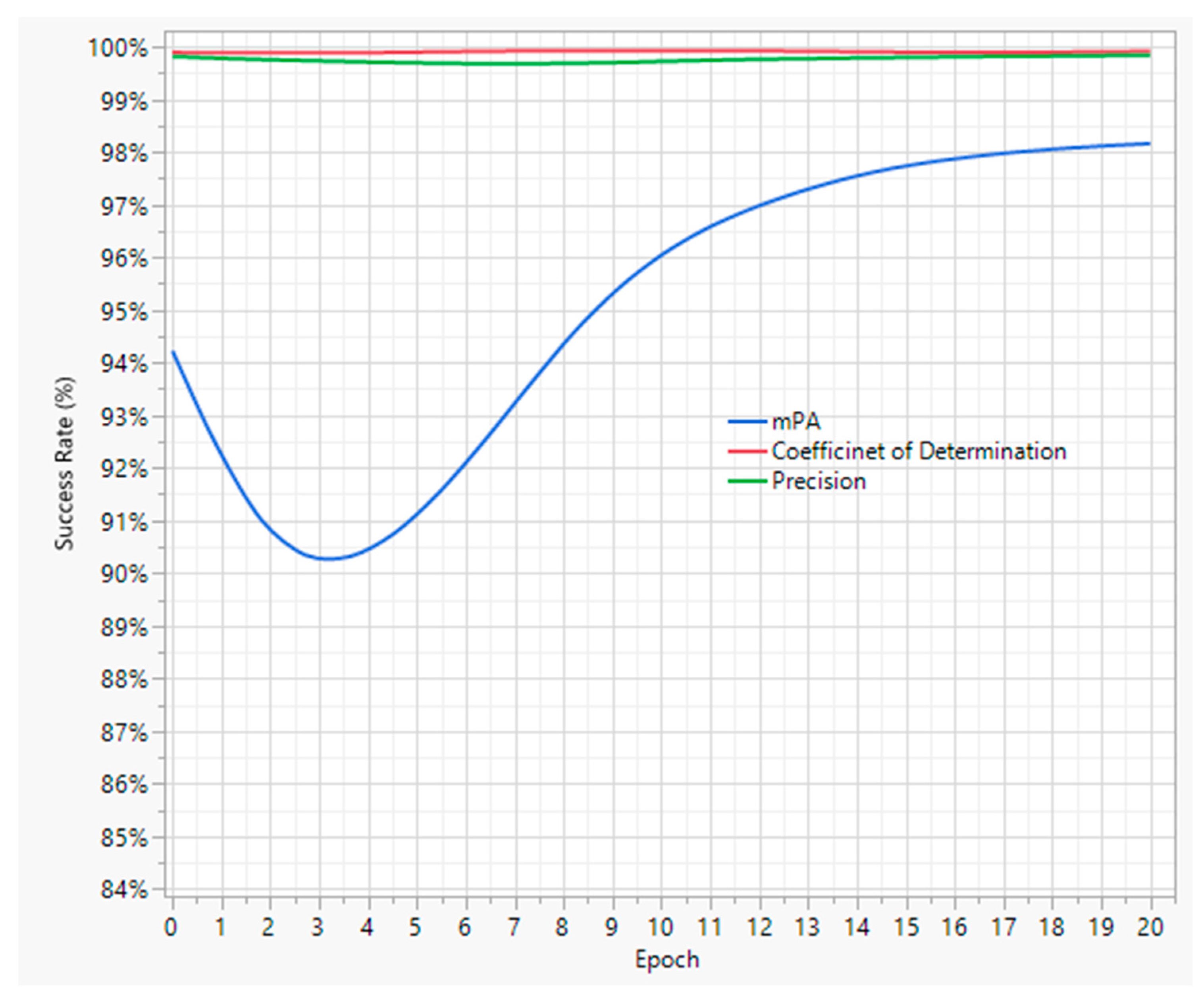
This dataset helped in providing a CNN model with a descent accuracy level, between 50 and 80%; later, it was applied to the next batch of 2160 unlabeled images extracted from the recordings and corresponded to broilers being 4, 18, 30, 44, and 47 days of age. Collectively, in these two steps, the dates were selected highly dispersed throughout the experimental period to utilize recordings that provided unique and less correlated information about broilers in their different rearing phases. They rendered a final trained model with high generalizability and lesser bias in recognizing broiler mobility. Eventually, the new successfully predicted images were fetched to the partially developed YOLOv5 model and made it learn further and increase its accuracy. Henceforth, we expected that it would help in creating a more robust and highly accurate model with minimal time and labor mobilization.
2.2. YOLOv5 DL Model
The novelty of the YOLOv5 model lies in its architecture. It comprises backbone, neck, and head sections. The backbone section focuses on distinguishing the receptive or feature fields in an image and tries to reduce the number of model parameters to achieve agility and lower memory requirement [
20]. Meanwhile, the neck section classifies important image features, which improve the localization success rate. The head section combines low- and high-level features to increase precision rates and provides the final losses of the model [
21].
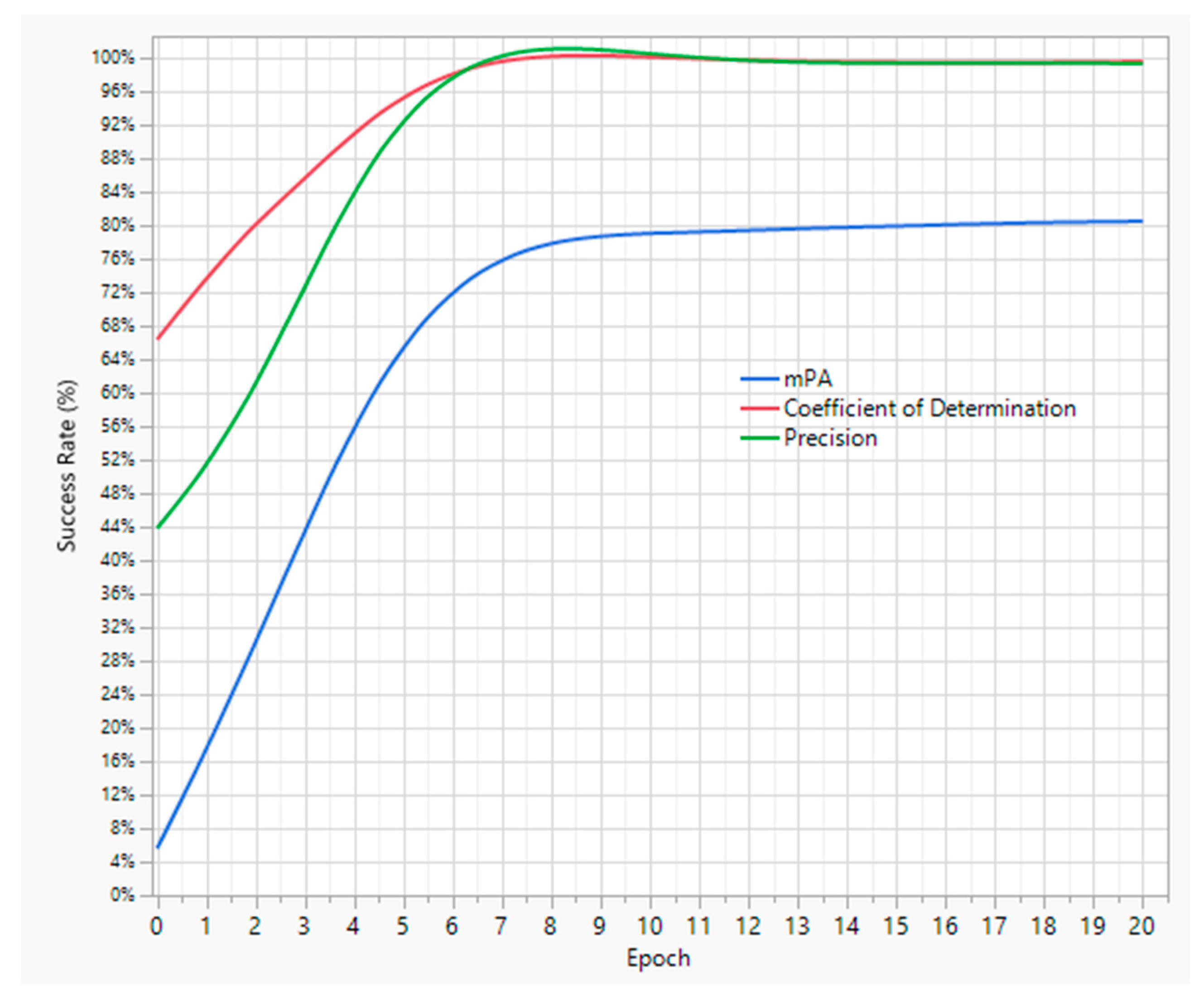
We used three YOLOv5 model performance metrics, namely mean average precision (mAP), precision, and the regression coefficient of determination (R
2), as depicted in Equations (1)–(3), respectively [
22]. The mAP metric demonstrates the effectivity of the DL model by taking the mean of the average precision for each class under scrutiny. In this study, however, there was only one class, i.e., broiler, so the class number (Q) is equal to 1. Meanwhile, the precision metric is a measure of object detection and classification by the model, true positive is the successful detection of an object, and false positive shows misleading detections by the model. On the other hand, the R
2 value shows how efficiently the model predicts (
) instances of actual data (
) [
21].
2.3. Deep Sort Algorithm
It is comprised of the Hungarian algorithm, the Kalman filter and the utilization of a bounding box, confidence, and deep features from frames detected by the CNN model. The Hungarian algorithm and the Kalman filter are applied for position and velocity parameter tracking and predict and update their future status accordingly. The integration of deep features extracted from the detected frames increases the likelihood of tracking objects effectively, even when they are located very near or are occluded [
23,
24]. As a result of consecutive frame association, motion prediction, and deep features, the tracking algorithm can attach identification (ID) numbers to each detected object and track them if it can differentiate them effectively. One problem arises during dense occlusion instances where this algorithm would not be able to associate objects in newer frames. Hence, it counts them as new objects and assigns new IDs. Here, we developed and applied a new algorithm integrated with the deep sort algorithm (neo-deep sort) that resolved or mitigated this problem.
2.4. Neo-Deep Sort Algorithm
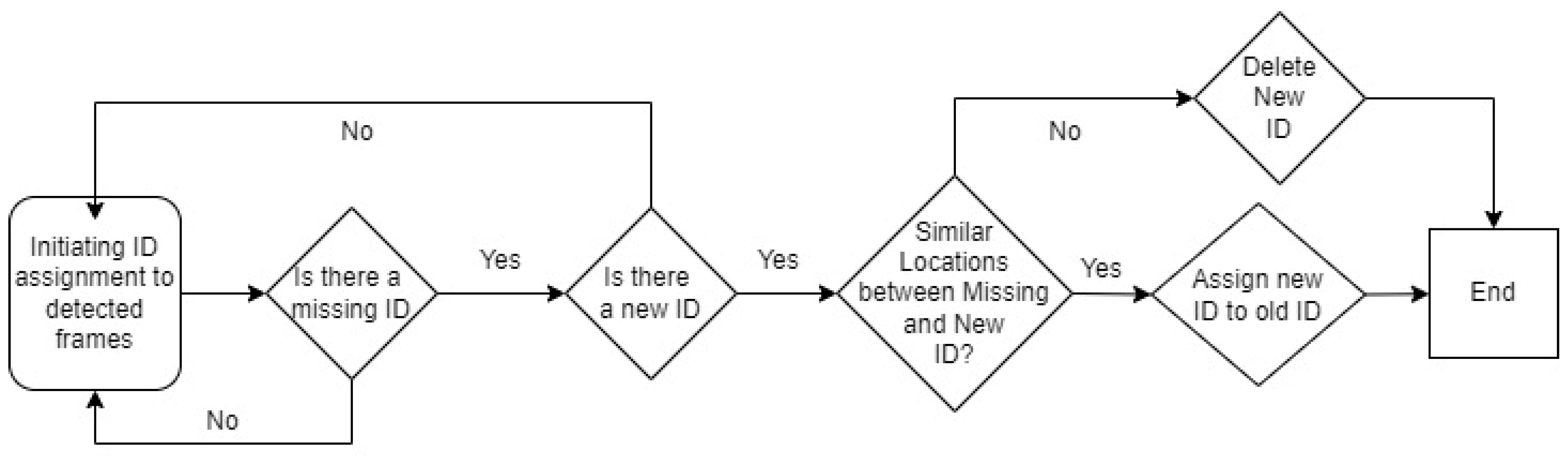
The problem of occlusion or lost detection instances poses a major hindrance to calculating overall individual broiler mobilities. The YOLOv5 deep sort algorithm would resolve this issue for the most part. However, as the broiler mobility and stocking density increase, it becomes a monumental task to overcome this issue. Hence, we tested the following algorithm to correlate new and old IDs assigned on detected objects by the deep sort algorithm. Essentially, the algorithm would detect when a previously detected ID is lost and, consequently, it tries to identify when one/more new IDs appear in the deep sort algorithm results. It then processes several steps to correlate the new ID with the lost ID or delete those instances that are falsely detected; the algorithm flowchart is shown in
Figure 2, and it was implemented using Python. The algorithm utilized the position of these lost and new objects to correlate them. If they were located at a distance smaller than the threshold distance, then the two IDs would be considered the same. This limit would be selected based on a trial-and-error process [
25]. We validated this approach with manual ID correlation and/or deletion and the neo-deep sort results.
2.5. Final Model
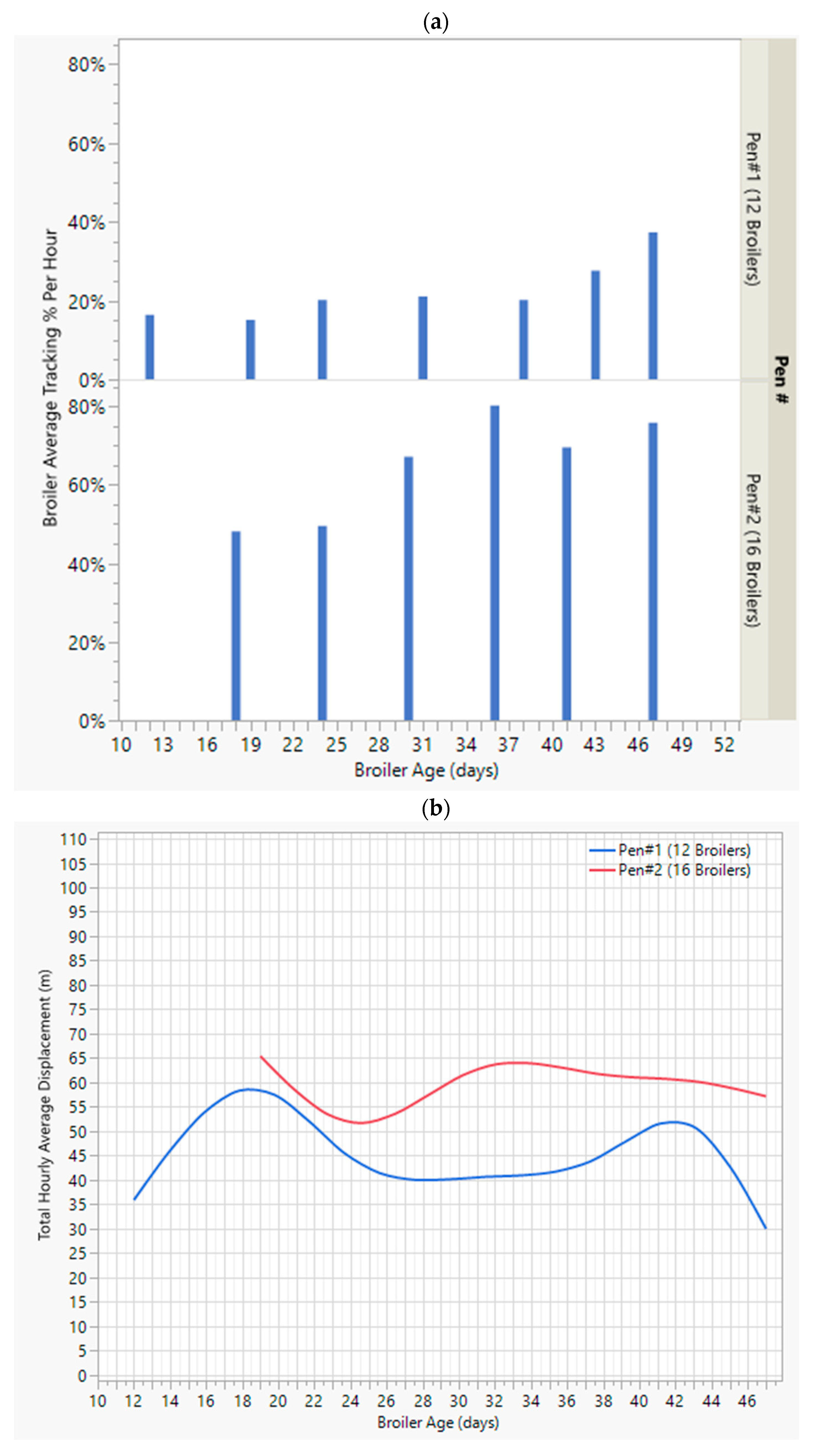
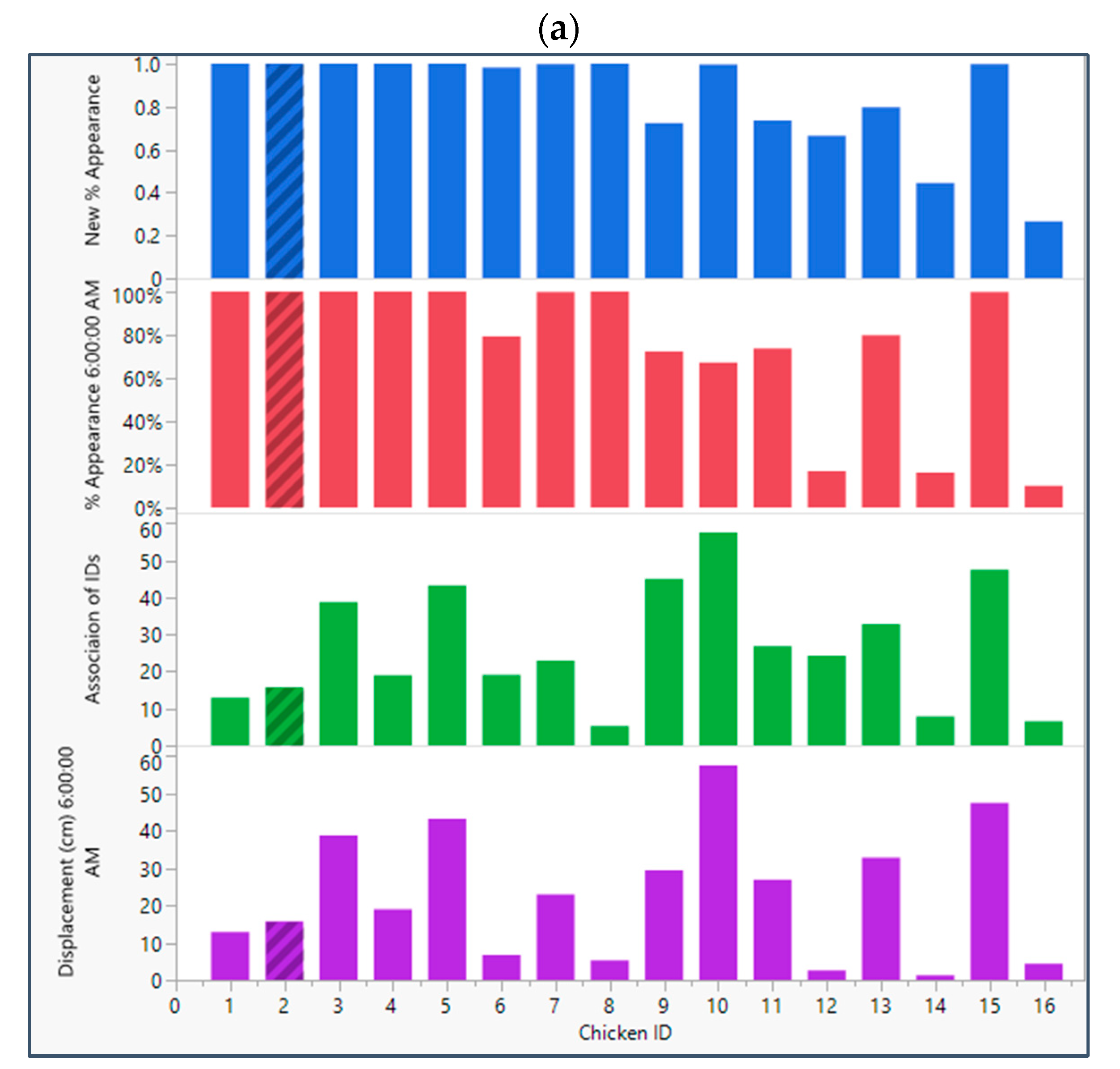
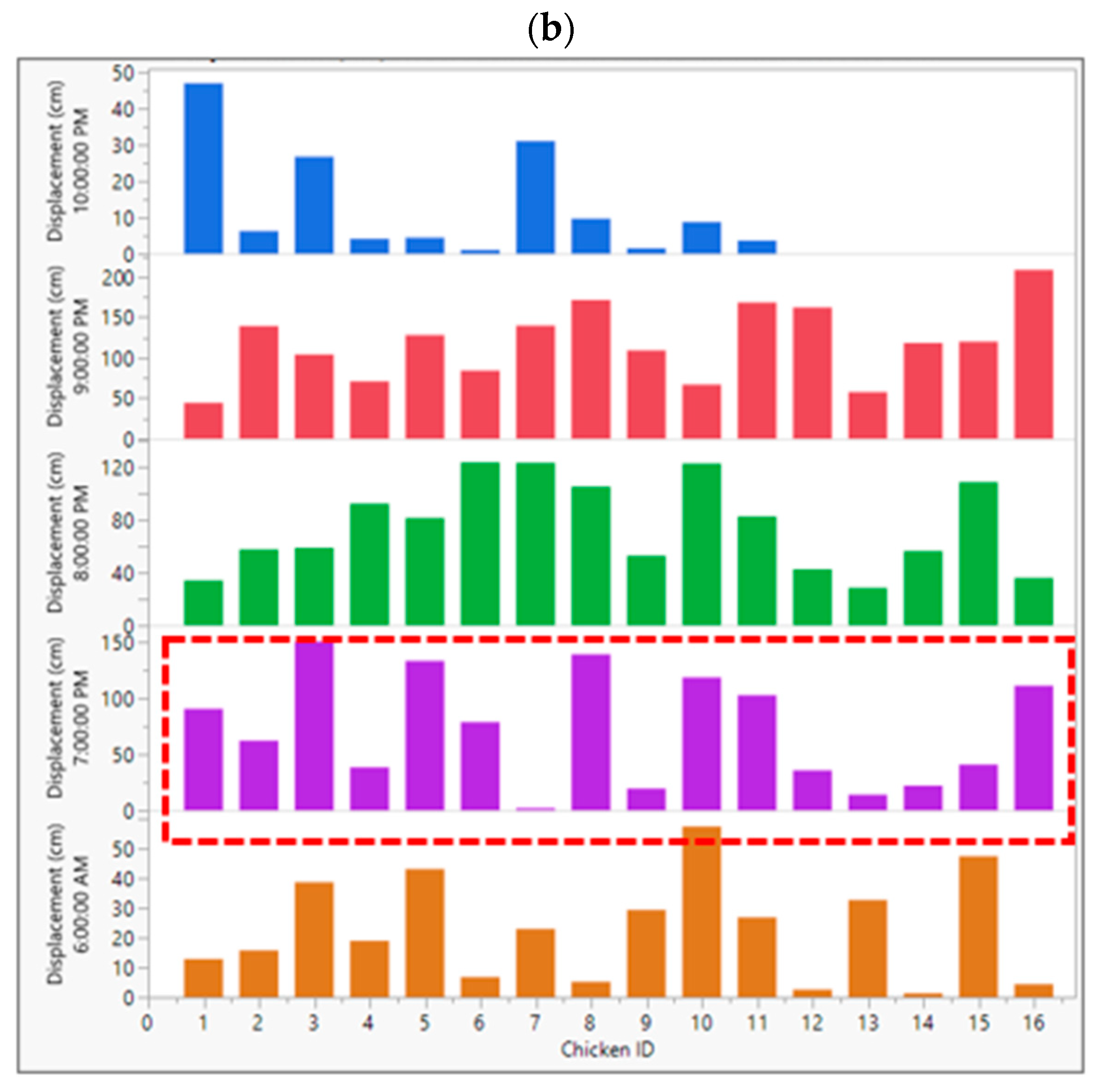
The final model consists of the YOLOv5 model for object detection, the deep sort tracking algorithm, and the new algorithm to correlate and/or delete ID instances for solving the occlusion problem. We obtained the results after these 3 steps, and then the flock level and individual broiler’s displacements and their respective speeds were extracted and categorized accordingly.
The results of the final model consisted of individual broiler’s position in consecutive frames of a video. The model detected and tracked frames at an interval of about 1/100 s. Hence, even minuscule positional displacements of broilers were recorded. This can be an advantage of DL models and render challenging calculation burdens. Afterward, the coordinates of all the detected chickens in each frame were provided by the model in terms of maximum (x,y) values with the corresponding frame width and height. These values were used to assign a centroid coordinate (xc,yc) for each detected frame by Equation (4). The centroid values for consecutive frames were used to obtain a displacement value by the respective broiler. Eventually, the incremental displacement values would be added to obtain total displacements or moved distance of a broiler, as well as the flock mobility levels.
Broiler mobility determination was not a straightforward summation of displacements. We anticipated that small perturbations in body movements would result in the model reading the frames as a potential displacement. Therefore, we would try to validate the model’s results with respect to baseline manual measurements as well. This might lead us to some degree of calibration of the model that would eradicate the misleading results.
4. Conclusions
Broilers’ daily mobility levels significantly impact their daily behaviors, which could be detrimental to rendering high-quality meat to the market. In this study, we have utilized the semi-supervised YOLOv5 DL model alongside the deep sort algorithm for object detection and tracking, respectively. Additionally, we proposed a new algorithm that tackled deep sort tracking losses due to bird occlusion instances. A total of 7 days of hourly videos, corresponding to seven consecutive weeks, were studied. The SSL method paved the way to train the YOLOv5 model with considerably fewer human and time resources. It helped in increasing the YOLOv5 detection accuracy from 81% to 98%. The final YOLOv5 deep sort model was influential in tracking broilers continuously, at least around 20% of the time, but it had limitations in doing so during occlusion periods. Our proposed algorithm lessened this problem to some extent but was incapable of fully solving the tracking lost instances problem. Henceforth, in general, individual broiler and flock level displacements and speeds were computed throughout their growth period. This helped in understanding their mobility trends and categorizing them accordingly. This vision-based study of mobility indicators could be further developed by incorporating more effective algorithms to solve the lost information problem due to occlusions.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}