1. Introduction
A Virtual Fencing (VF) system is a computerized method with inherent features to create spatial boundaries of custom geometric size and shape without any physical fences or barriers. The study and use of VF (or Fenceless) systems have gained momentum over the past three to four decades due to their salient advantages over traditional systems in terms of the flexibility (i.e., customized virtual zones of animal monitoring), reduced cost, and lower maintenance demand [
1,
2]. Although physical fences are designed with 100% stock-proof capabilities, expenditure on agricultural fencing in grazed farmlands has been among the most expensive infrastructure cost in the 19th century [
3,
4]. Cost reduction via new effective alternatives for livestock containment has therefore been of significant undertaking. Consequently, VF is considered by the agricultural community as the next generation of physical fences which can significantly reduce the construction/existence of physical barriers and cut the associated costs. Features that can be proven useful for replacing physical barriers for control animal movement and position in grazing systems include visual, auditory, and possibly olfactory cues [
5]. A VF system with a modularized toolbox of the above features (but not limited to) could provide information about the animal’s location and changes in grazing intensity on pasture resources in real time [
6]. With the help of such evidential information, monitoring animal spatial distribution may lead to improved decision making in regards to efficient land utilization [
7], to help prevent soil erosion and soil and water contamination [
8]. VF systems can also be used to train animals for a smart response to such stimuli by manipulating real time information from these cues [
5,
9]. In this regard, VF can be utilized for domestic sheep (
ovis aries) that are reported to have excellent learning capability and memory compared to other farm animals [
10].
Recent literature on animal behaviour reports various studies that investigated the abilities of cattle and sheep to learn and respond to a virtual boundary based on cues associated with negative consequences [
11,
12,
13,
14]. For example, a sound warning should be emitted when the animal approaches a restricted area. If the animal continues forward, the subsequent action should be an electric shock. Employing an acoustic approach can prove to be useful for the animals to learn to associate electric shocks with sounds and to prevent them from proceeding further upon the emission of the sound cue. Such a learning approach with the use of audio signals with the stressor of the electric shock can allow the animal to adapt to the negative consequences. It has been reported that training animals using an electric stimulus could have a negative impact on their welfare [
15,
16], and this has led to their use on sheep to become illegal, as is the case in the UK [
17].
Research and development on the ability of sheep to perform a specific task in response to an auditory stimulus alone has significantly been lacking. Morris et al. [
9] proposed the use of auditory and visual cues to study the ability of sheep to complete an expected task. The study performed by Morris et al. used 20 merino ewes, where the sheep population was split into two halves with visual and auditory cues, respectively to perform the experiments. A continuous audio cue of 392 Hz originated from speakers, positioned above the feed buckets of the sheep. The study reported that sheep could not learn to respond to the audio cues since the learning probability did not increase over the testing period. The authors suggested a potential for sheep learning from audio cues and the need for further research [
9]. Directional stimuli can be used to move animals in a desired direction as this could have commercial applications.
Heffner [
18] generated data on frequencies that could be heard by several animal species including humans. The study observed that sheep are able to hear in the range between 125 Hz and 42 kHz, with 10 kHz identified as the most sensitive hearing frequency. Moreover, further study and investigation on the intensity and frequency of sounds were proposed to train animals. In [
19,
20], it was reported that using intermittent sound pulses as opposed to a continuous stimulus may prove more appropriate since discontinuous sound are effective in producing better response. Umstatter et al. [
21] proposed an approach of controlling cattle location via broadcast audio preferred over electric stimuli. The experiment was based on 38 animals with loudspeakers placed around a small paddock. The loudspeakers played unpleasant sounds in the ranges of 8 kHz and 8–10 kHz, and one acute sound. Movement sensors were located closely and linked to the loudspeakers, triggering sounds when the animals approached the restricted area. Although, as per the study, unpleasant and acute sounds can control cattle location, the approach was ineffective in replacing conventional fences with a proposal for further research.
According to the aforementioned studies, training animals to respond and learn virtual fences based on various sources of stimulation is a feasible yet challenging task. Despite mounting literature in the area, further investment in terms of the research and development is desirable for the use of only acoustic sounds, especially in the case of sheep. Therefore, the present study aims to fill the gap and test the feasibility of removing the use of electric shocks and, instead, manage animal behaviour with audio signals alone, thus leading to the development of a welfare-friendly virtual fence system. In our experiment, the hypothesis was set to be a range of audio cues to generate an aversive stimulus to restrict the animals in a virtual fence. To the best of our knowledge, this is the first study that analyses the effect of various sound frequencies and white noise without pairing an electric stimulus as a method to impose a penalty mechanism for sheep.
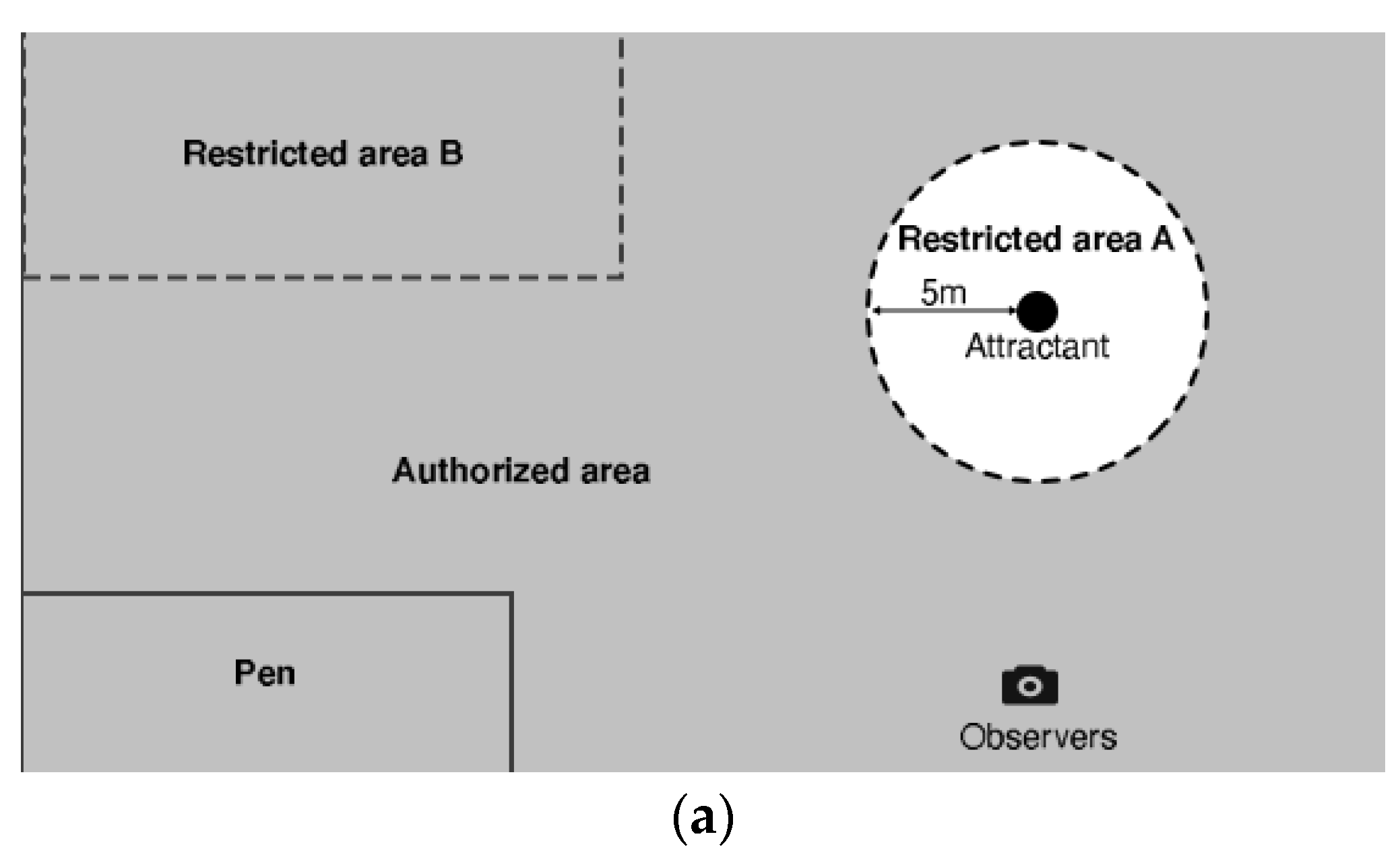
The experiments performed in this study were targeted to address various outstanding questions with respect to: (i) restricting sheep and enforcing a change of course via only the acoustic cues without the need for a stressor; (ii) the identification of the most effective audio frequencies in restricting sheep access to an attractant or a restricted area; (iii) assessing robust correlations between the time to respond to the sound with various factors (e.g., the attractant, animal personality, and audio frequency), and (iv) identifying the existence of a correlation between sheep personality types with the latency of the animal to respond to the emitted sounds.
3. Statistical Analysis
IBM SPSS Statistics (software version 26, creator IBM, country: New York, United States) was used for data analysis that included “duration” as the dependent variable, which was tested against “sheep_type”, “frequency”, “attractant”, and “response”. The analysis was conducted to interrogate the effect of sheep personality type and the applied audio stimulus on the duration of response. A generalized linear model (GLM) [
26] under the Tweedie distribution [
27] with the Log Link function was used that utilizes a training method for various sets of regression models. GLM attempts to represent the relationship between the independent variables X and the dependent variable Y through an approximate additive/linear mapping that can be useful when such a definitive additive or linear relationship is missing. GLM consists of a linear predictor (η
ι), a link function (g), and a variance function var (Y
i) as shown in Equations (1), (2), and (3), respectively:
where the β’s are the coefficients to be estimated, for i = 1,…,ρ, and ρ is the number of independent variables. The link function is given by:
and describes the dependence of the mean μi on the linear predictor. Finally, the variance function,
describes the variance on the mean, where Φ is the dispersion parameter. Further information on the generalized linear model can be found in [
26,
28].
The main effects and interactions of frequency, attractant, sheep personality type and response on the duration were analysed using the Wald chi-square test [
29], where
p < 0.05 was considered to be statistically significant. The results provided information on whether there is a significant effect between the time to respond to the sound and (1) the attractant; (2) personality type of the animal (3) response; and (4) frequency. The analyses illustrated whether faster or stronger responses were obtained from animals exposed to any of the acoustic stimuli. The data obtained are expected to contribute to future designs of audio-based VF systems.
4. Results
Table 1 presents the number of repetitions using each band and the number and type of responses. From
Table 1, it can be observed that the frequency range of 1–9 kHz failed to attain a substantial response from the animals, since the success rate was relatively modest (i.e., 47.37% for 1–5 kHz, and 35.29% for 6–9 kHz) and, thus, these two bands were excluded from trial 2.
From the
Table 1, it can be observed that white noise was 100% successful in restricting animal access to the feed bowl, followed by the 15–17 kHz frequency range with an 84.21% response. The frequency bands of 125–440 Hz and 10–14 kHz restricted animal access with success rates of 74.29% and 78.95%, respectively. The highest score where the animals turned and walk away from the feed bowl was achieved using frequencies in the range of 15–17 kHz, in contrast to white noise, where the animals turned and walked away only 42.31% of the time. When emitting sounds in the frequency bands of 125–440 Hz and 10–14 kHz, the animals turned and walked away from the bowl with rates of 69.23% and 66.67%, respectively. Animals turned and ran away from the feed bowl 48.08% of the time when white noise was emitted, contrary to the frequency band of 15–17 kHz, where the animals did not run.
4.1. Testing the Selected Sounds vs. Category of Animal Response
The results from the second trial are presented in
Table 2. During the trial, an average response rate of 90.62% was achieved. The highest response for a specific type of audio stimulus was 92.86%, achieved using low frequency sounds between 125 and 440 Hz. The lowest response rate, i.e., 89.27%, was recorded when using audio signals in the 15–17 kHz range. The average rate of response for animals turning and walking away was 82.26%, with the highest rate of this response (90.16%) recorded at the 15–17 kHz range. With regard to the behaviour where animals turned and ran, this occurred 12.83% of the time when white noise was emitted. The animals did not run when the sound frequency was between 15 and 17 kHz. Based on all selected frequency sounds, the animals stopped while walking towards the bowl between 9.84% and 14.93% of the time. When considering all selected sounds, only 9.38% of the time did the animals not respond to the stimulus and instead proceeded towards the bowl.
4.2. Duration Statistics and Effect of Sheep Personality Type, Attractant, Frequency, and Response on Duration
The minimum, maximum, mean, and standard deviation of the dependent variable (stimulus duration) are shown in
Table 3.
Table 4 provides information on the results from the overall GLM model [
28]. The omnibus test is a likelihood-ratio chi-square test of the model versus the null hypothesis [
30]. A significance value of less than 0.05 indicates that the current model is more likely than the null hypothesis. From the likelihood ratio test of all the independent variables, a
p-value of 0.0001 was obtained, indicating a statistically significant overall model, as shown in
Table 4. The model was then tested to identify which of the independent variables have a significant effect on the dependent variable. The main effects were tested using one independent variable at a time versus the dependent variable. Variables with a significance value of less than 0.05 showed that they had an apparent effect.
Additionally, interactions between the variables were considered and tested to identify whether they had any significant effect on the duration. Interactions tested whether the product of two or more variables influenced the relationship between the independent and the dependent variables. The results of main effects and interactions of the presence of attractant, sheep personality type, and frequency on the duration are shown in the following subsections. The response variable alone showed no effect and, therefore, it was excluded from the results. Additionally, the interaction effects of variables on the duration were tested, e.g., interactions of sheep type*frequency on duration were explored because this yielded further information on which frequency bands play a role in the duration of the animals response based on the sheep personality type (i.e., bold vs. shy).
4.3. Exploring the Effects between the Independent Variables and the Dependent Variable
4.3.1. Presence of Attractant vs. Stimulus Duration
The average duration (seconds) of the animal response time when exposed to a sound is shown in
Table 5. A relatively longer average response time of 4.60 s was observed when the area was provided with a feed bowl as compared to 3.19 s of the response time in the absence of the feed bowl. The average differences of these response times for the two categories (presence and absence of feed bowls) were observed to be statistically significant showing a faster average response time of 1.41 (4.60–3.19) s in the absence of the feed bowl (
Figure 2 and
Table 5). The boxplot in
Figure 2 shows that the maximum time in which to respond when there was no attractant is approximately 1.4 s faster than when there was a feed bowl. The median time in both situations is 4 s, and the minimum time is little under 1 s.
4.3.2. Sheep Personality Type vs. Duration
As shown in
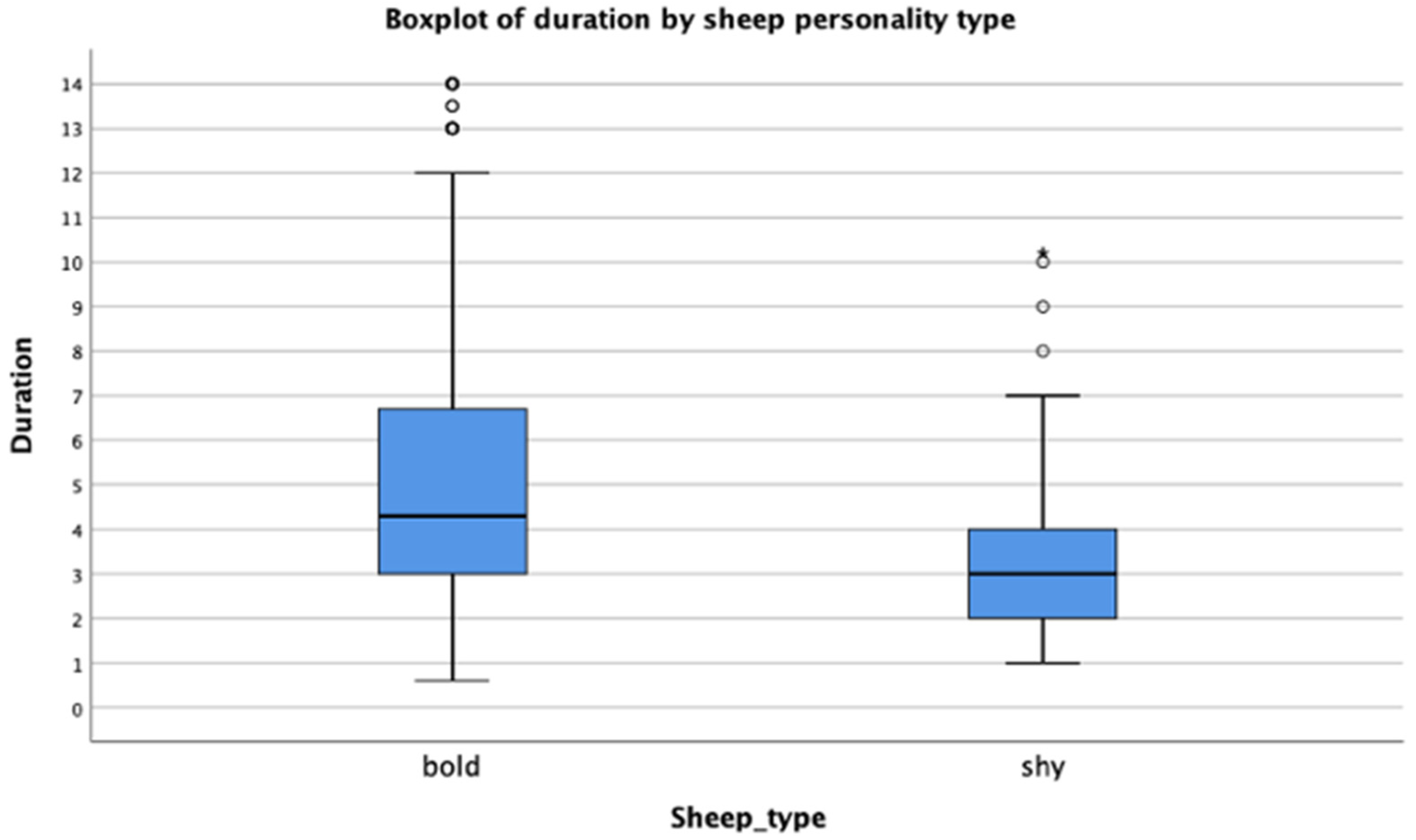
Table 6, bold animals respond to sounds with a mean duration of 5.17 s, in contrast to shy animals with a mean duration of 3.05 s. Pairwise comparisons indicated statistical significance between sheep personality type and the sheep response time (
p-value of 0.0001), having a mean difference of a 2.12 (5.17 s–3.05 s) s faster response than when the animal is considered shy.
Figure 3 shows that shy animals need less time to respond to sounds compared to bold animals. The maximum time in which shy sheep responded was 7 s, while for bold animals this was 12 s. On the other hand, the minimum time for both personality types to respond was just under 1 s with a median of 4 s and 3 s for bold and shy sheep, respectively.
4.3.3. Frequency vs. Duration
Results indicate no significant difference by means of duration between the four frequency bands.
Table 7 shows that only the low frequency band (125–440 Hz) has a faster response with a mean of 3.12 s, in comparison with the remaining three (white noise, 10–14 kHz, and 15–17 kHz). A pairwise correlation analysis of each frequency band and their pairwise comparison using the Wald chi-squared test showed a
p-value of 0.023. Further analysis of the frequency indicated a statistically significant relationship between white noise and the 125–440 Hz band with a mean difference in time to respond of 1.35 s. The frequency bands of 10–14 kHz and 15–17 kHz were found not to be significantly different from white noise. The overall estimate of the main effect between frequency and duration has a significant effect with a
p–value of 0.033.
4.4. Exploring the Interaction Effects of Sheep Type and Frequency on Duration
Table 8 presents the model-estimated marginal mean, standard error, and confidence interval of the duration when considering interactions between sheep type and frequency category. From
Table 8, it can be observed that that the mean duration ranges from a low of 2.39 s for shy sheep exposed to sounds from the 125 –440 Hz band, to a high of 6.07 s for bold sheep exposed to sounds from the 10 k–14 kHz frequency band. Levels of significance in the relationship between personality type and frequency band are discussed in the next section.
Table 8 represents statistically significant effects. The results in
Table 8 indicate that the interaction effect of the combination of bold personality*frequency on duration is statistically significant between the frequency band 125–440 Hz vs. 10–14 kHz and 15–17 kHz, with
p = 0.026 and
p = 0.028, respectively. Bold animals react 1.99 s faster when sounds are emitted at the 10–14 kHz band compared to the 125–440 Hz band, and 1.94 s faster when 15–17 kHz sounds are emitted compared to those of the 125–440 Hz band. On the other hand, the pairwise comparison between frequency bands and shy personality sheep shows a significant difference with a
p-value of 0.033 between sounds in the 125–440 Hz band vs. white noise, where in this situation, shy sheep react 1.81 s faster in the case of 125–440 Hz. There is an overall significance value of 0.0001 on the effect of the combination of sheep type*frequency band.
5. Discussion
In this research, a systematic analysis of the effects of audio stimuli and associated parameters as a means of influencing animal response, without the application of electric shocks, in a flock of Hebridean ewes was presented. Previous studies have shown that, without prior warning of an aversive cue such as the visual tape of an electric fence or the audio warning prior to the electrical stimulus, animals are at risk of becoming confused and may experience helplessness and hopelessness [
31,
32]. In the experiments performed in this work, associative learning using acoustic stimuli was used, starting benignly and then increasing in volume as punishment, in order to provide animals with the necessary warning to stop once the audio warning was heard right at the start.
The technology of virtual fencing systems based only on sound is not new; however, it has been mostly applied on cattle [
21,
33]. Studies of virtual fence systems for sheep solely based on sounds are limited and most of them have used a combination of auditory warning and electric stimuli to train the animals [
31,
34,
35,
36]. It has been reported that training animals using an electric stimulus could have a negative impact on their welfare [
15,
16], and this has led to their use on sheep being made illegal, as is the case in the UK [
17,
37].
5.1. Frequency Bands vs. Response vs. Sheep Personality Type
Overall, the animals reacted satisfactorily, with response levels over 88.48% for all four selected sounds. A total of 89.88% of the response times indicated that it is possible to monitor the animals’ location on the land they graze. The most desired response of the animals was to turn and walk away calmly, suggesting that the emitted sound does not cause any stress on the animal [
31,
35,
36]. From the above results, the following observations may be drawn. White noise appears to be more alarming to animals than the rest of the frequency bands, since for 20.50% of the times, the recorded response was to turn and run away. On the other hand, when sounds in the higher frequency band of 15–17 kHz were emitted, the animals either turned and walked away with a rate of 89.77%, or stopped with a rate of 10.23%. Using this band, the animals did not run away and this indicates that this band was successful in managing animal behaviour while not causing unnecessary stress. Moreover, when sounds in the frequency band of 10–14 kHz were emitted, the animals turned and walked away 81.71% of the time, and turned and ran 4.88% of the times, and stopped with a rate of 13.23%. This band attained the second highest response with 89.13% of responses. The literature reports that sheep can hear best at 10 kHz [
18], and this might be the reason for the high rate of occurrence of desired reactions.
From the results section, it is suggested that all four sounds (i.e., white noise and selected frequency bands) could be used in the conceptual design of a virtual fencing system for shy animals. However, some sounds may be subject to habituation. The results suggest that, in a virtual fence system, three bands of 125–440 Hz, 10–14 kHz, and 15–17 kHz could be randomly played to achieve one of the desired behavioural reactions. It was observed that white noise caused more stress/irritation to the animals based on their reaction (i.e., turned and ran away from the area), and thus it may not be subject to habituation. Our suggestion is in agreement with Umstatter et al., i.e., the development of a smart virtual fence should trigger different sounds in a random pattern to avoid habituation, while white noise could be used as a last resort [
33]. Based on these results, it could be concluded that the temperament of an animal plays an important role in terms of their behavioural response to the use of a virtual fence. Shy animals reacted as desired with a rate of 98.40% and additionally often did so when bold animals were wearing the collar, and reacted as desired. Therefore, it could be implied that audio cues were successful at restricting sheep in accessing a restricted area and that they have potential as a replacement tool to using electric stimuli in a VF system. The ability of the animals to learn a virtual fence system based on their temperament needs to be further investigated. Other studies have found no association between temperament and learning [
31]. Sheep have excellent learning and memory abilities and can follow sophisticated rules including reversal learning [
10,
16,
38,
39] and response inhibition [
40]. Furthermore, the time required for training sheep is markedly shorter than has been reported in primates, where training and testing typically takes many months [
38]. In this study we demonstrated experimental evidence that that the response inhibition capability in sheep individually or in small flocks could be linked to control of the position via an acoustic stimulus to instruct animals to stop moving in one direction and take another away from a virtual boundary.
5.2. Main Effects and Interactions of Sheep Personality Type, Presence of Attractant, and Frequency on Duration
Attractant vs. Duration and Sheep Personality Type vs. Duration
From the results obtained while analysing the main effect of the attractant on duration needed for the animal to respond, it was confirmed that the mean difference of the estimations is statistically significant (p = 0.016). The animals reacted faster to the exposure of the sounds, when there is no feed bowl involved. This suggested that the sound somewhat irritated the animals and, thus, they reacted faster when there was no motivation/reward. In a real-world scenario, this could indicate that, if a virtual fence is used in a pasture, where taller and better grass is available in the restricted area, the animals may be willing to attempt to cross over more times. On the other hand, they could be easily manipulated with the emission of sounds if the restricted area is not as attractive to them.
5.3. Bold vs. Shy Animals
Based on the results, the band of 125–440 Hz showed a dominant response for bold animals and needs further investigation. The same was observed with shy animals for the same frequency range. In this situation, low-frequency sounds caused a faster and more statistically significant response of approximately 2 s (
p = 0.033) in comparison to white noise. The reaction to the low frequencies is interesting and it is worth investigating further with larger flocks and different animal breeds. This frequency band may be more alarming, or the observed behavioural responses may have been due to unknown factors related to the hearing sensitivity of sheep, which could be, e.g., associated with age [
2].
6. Conclusions and Future Directions
The present study demonstrated a potential alternative to the use of electric shocks for sheep behavioural management with the use acoustic cues, thus promoting the design of future virtual fencing systems. Recent literature has also indicated that there is considerable evidence for such developments to be further explored in commercial applications. In the study, four frequency bands were identified, which favourably influenced behavioural responses, related to the spatial distribution of sheep, specifically, restricting access to a feed bowl or a specified area with an overall success rate of 89.88%. White noise introduced overt stress to the sheep, as the sheep turned and ran away from the area on 20.50% of the occasions. Animal personality (i.e., bold vs. shy) has a significant correlation with their reaction time, with shy animals having a faster reaction time to avoid continued emission of auditory stimuli. In addition, the presence of a feeding bowl decreases the reaction time of the sheep, so they react much more slowly to sounds.
The evidence collected in the present study through two trials can be vital in understanding the potential for using acoustic stimuli in VF systems and restricting access to areas with taller and higher quality grass. The utilization of a VF system in such settings can be challenging as the animal persistence for feeding may overcome their fear of an acoustic signal for managing the spatial position.
The results from this study are promising; however, the work conducted used a small group of animals. Lastly, it was observed that lower frequencies cause a significantly faster reaction, and further investigation with diverse experiments using a lower frequency band can be significantly useful for the validation of the VF systems. It is noted that, although the present study identified various useful correlations based on two trials, further investigation with larger flocks and other animal species is required for the validation of VF systems and their applicability for wider settings. Additionally, future work should examine the association between age and response to sound.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}