Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot


Abstract
:1. Introduction
2. Derivation of Force Model
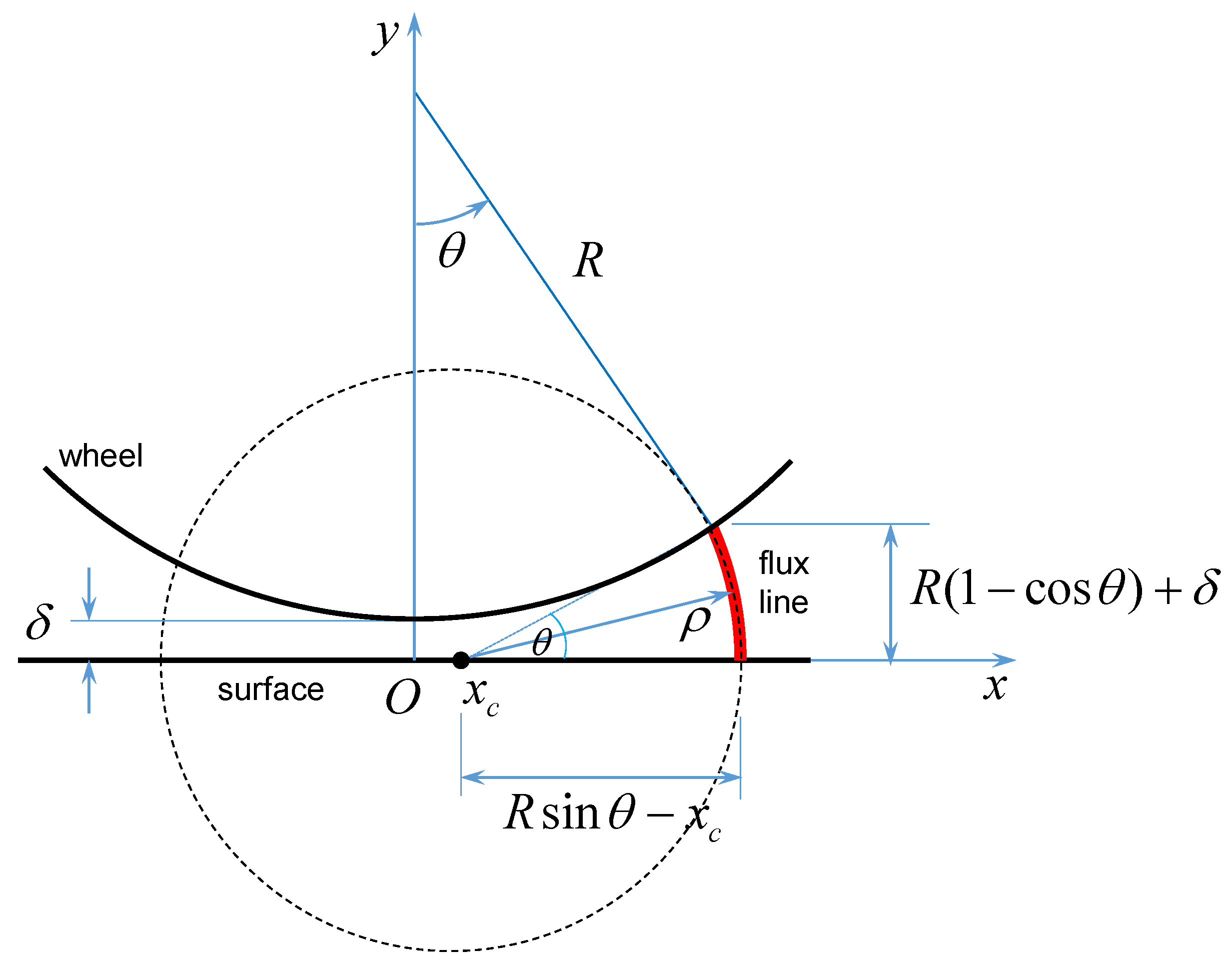
2.1. Reluctance Estimation
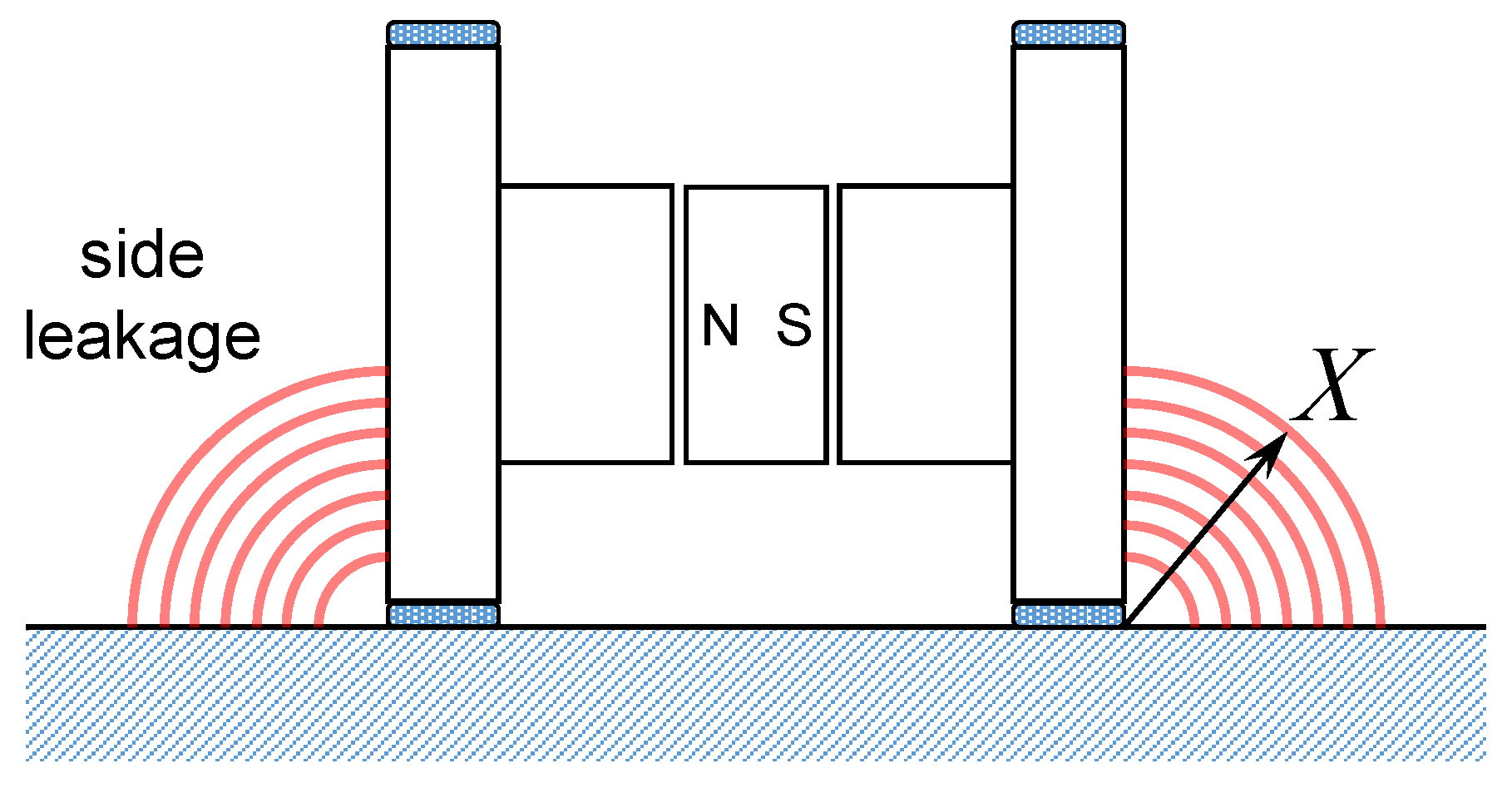
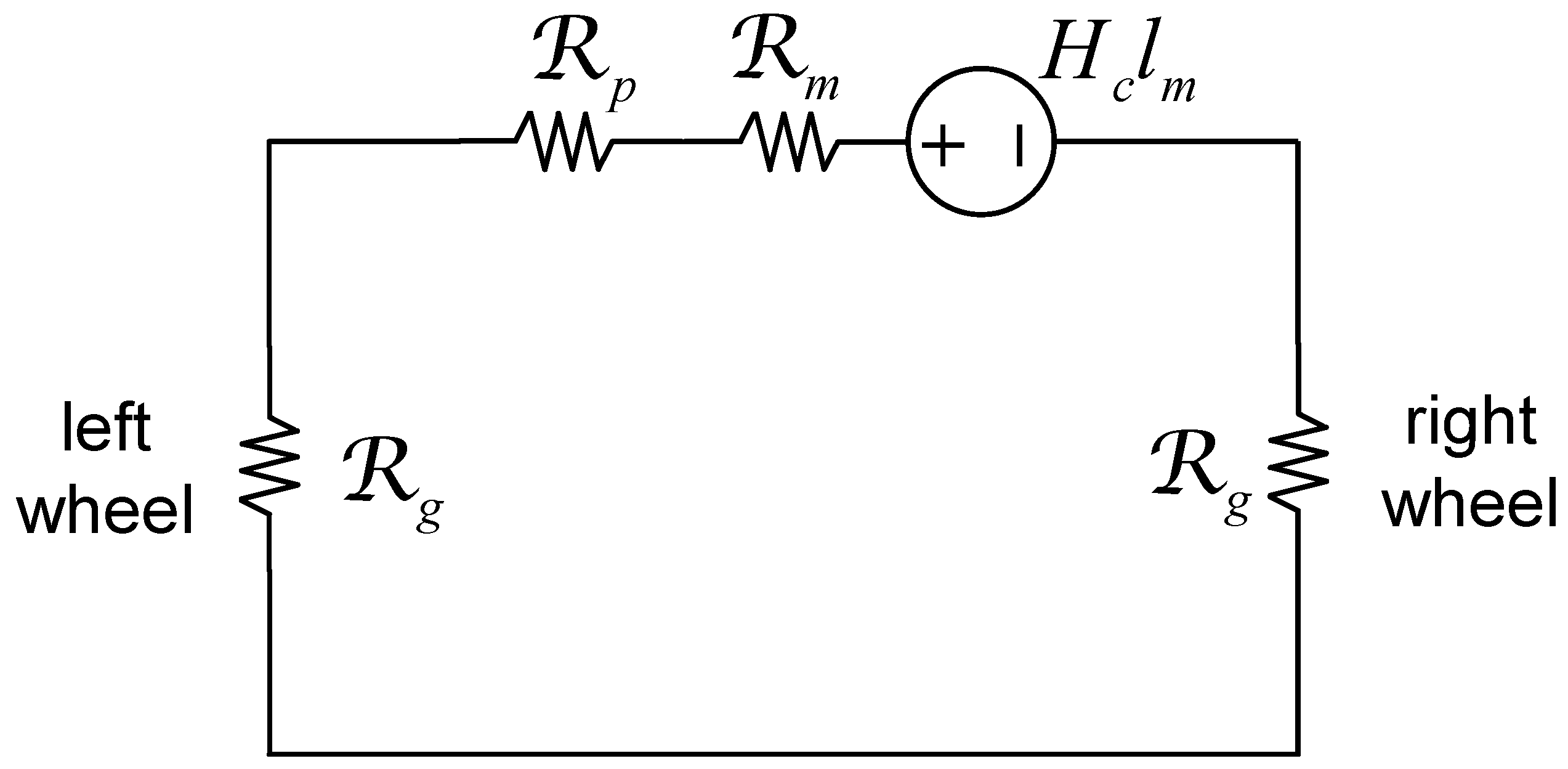
2.2. Magnetic Circuit
2.3. Attractive Magnetic Force
3. Validation of Force Model
3.1. Numerical Validation
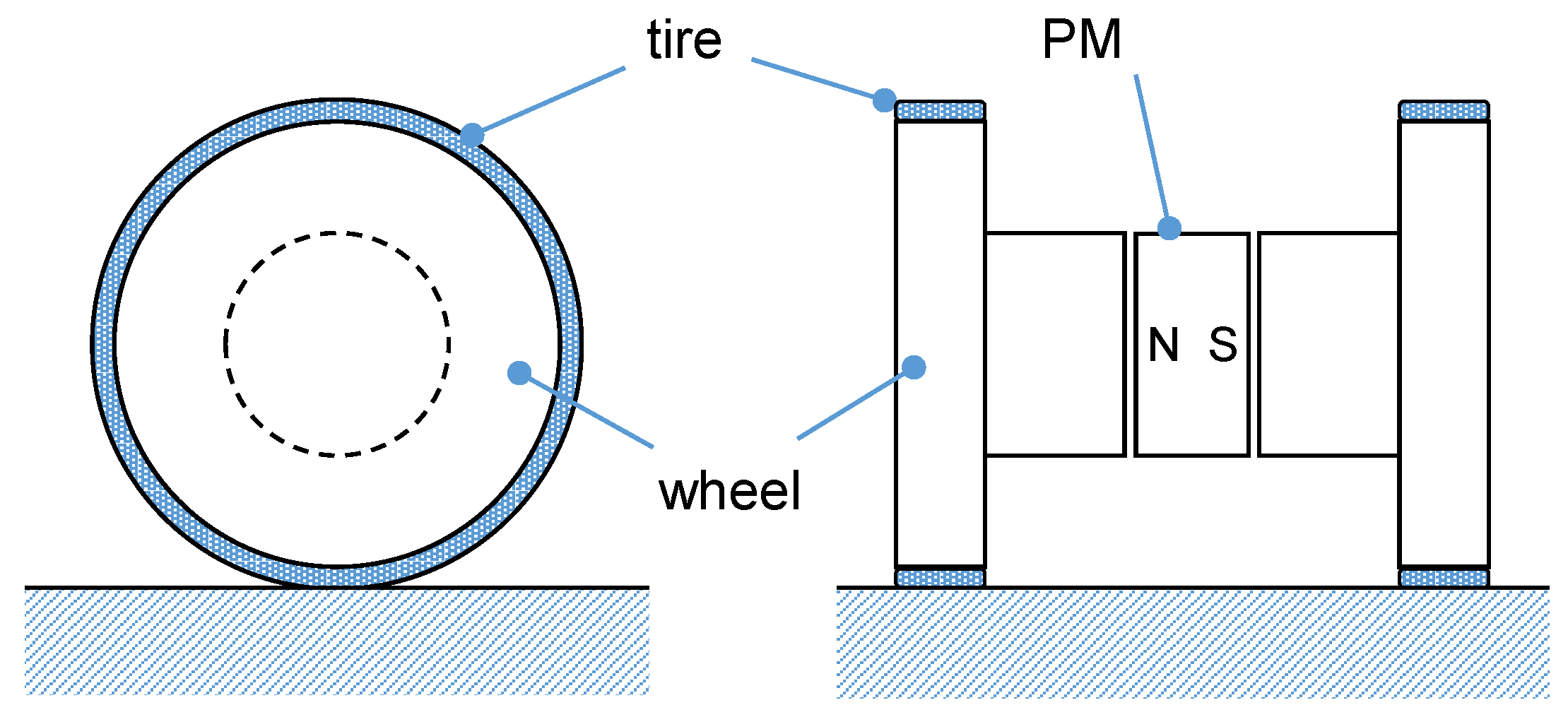
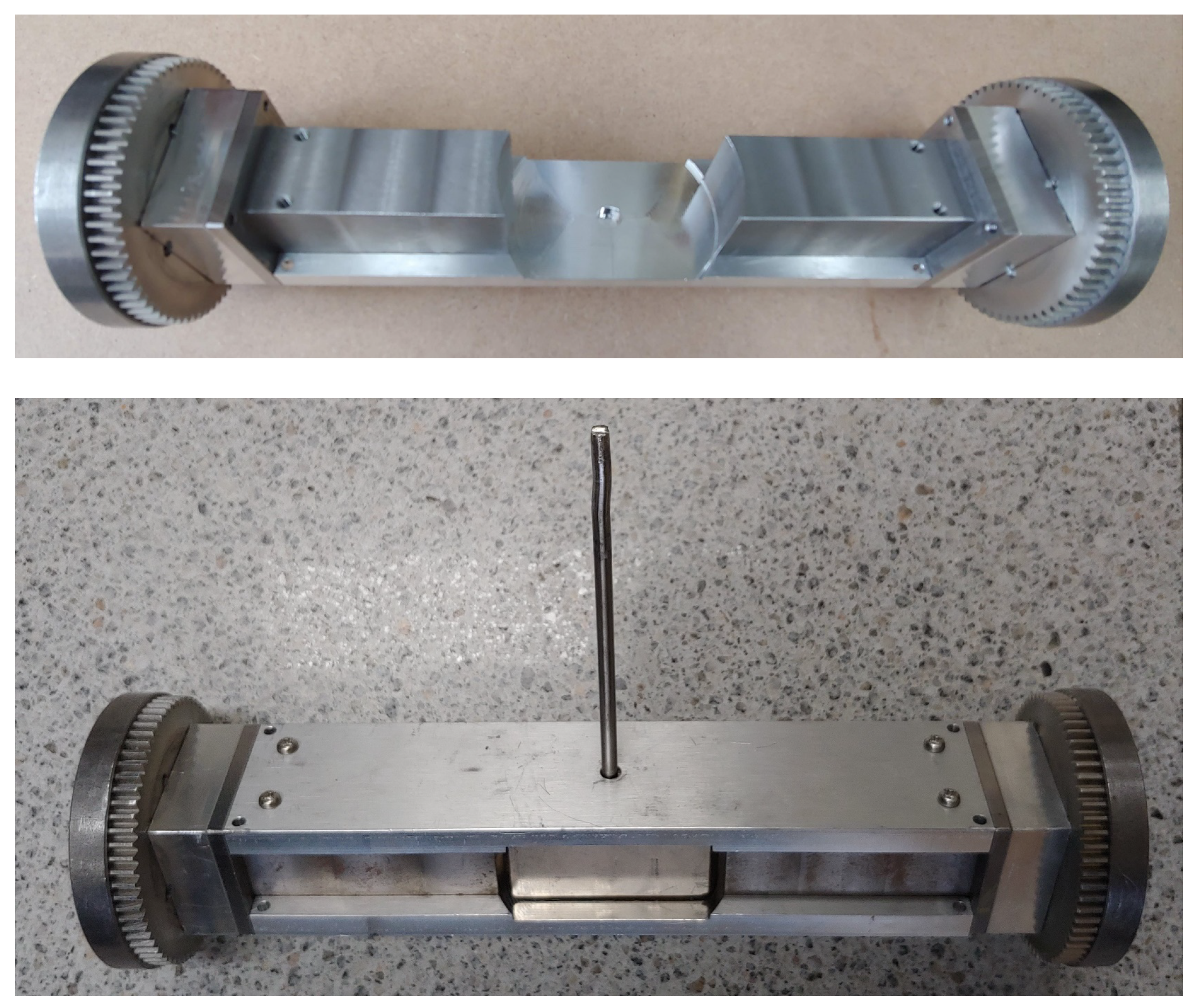
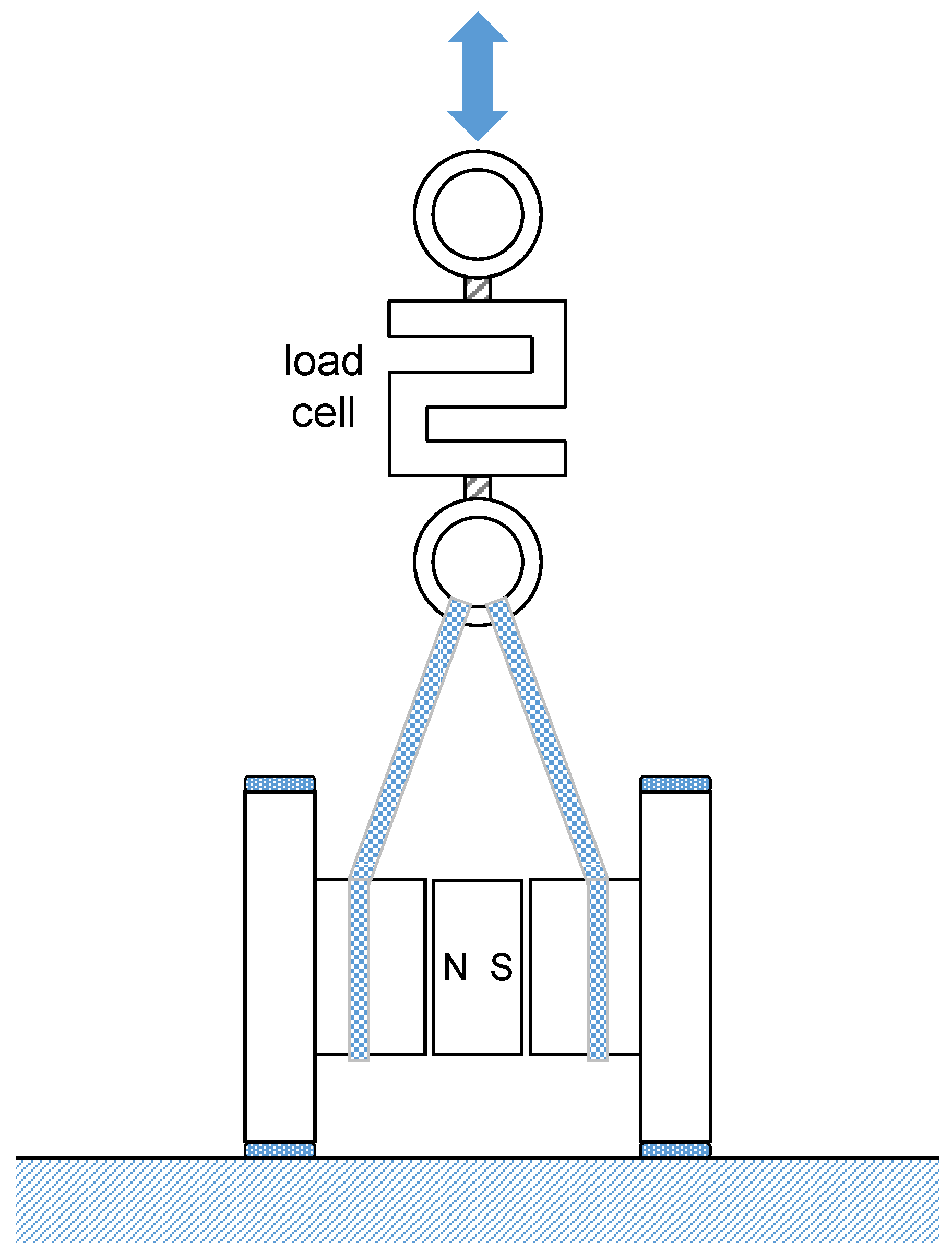
3.2. Test Setup for Experimental Validation
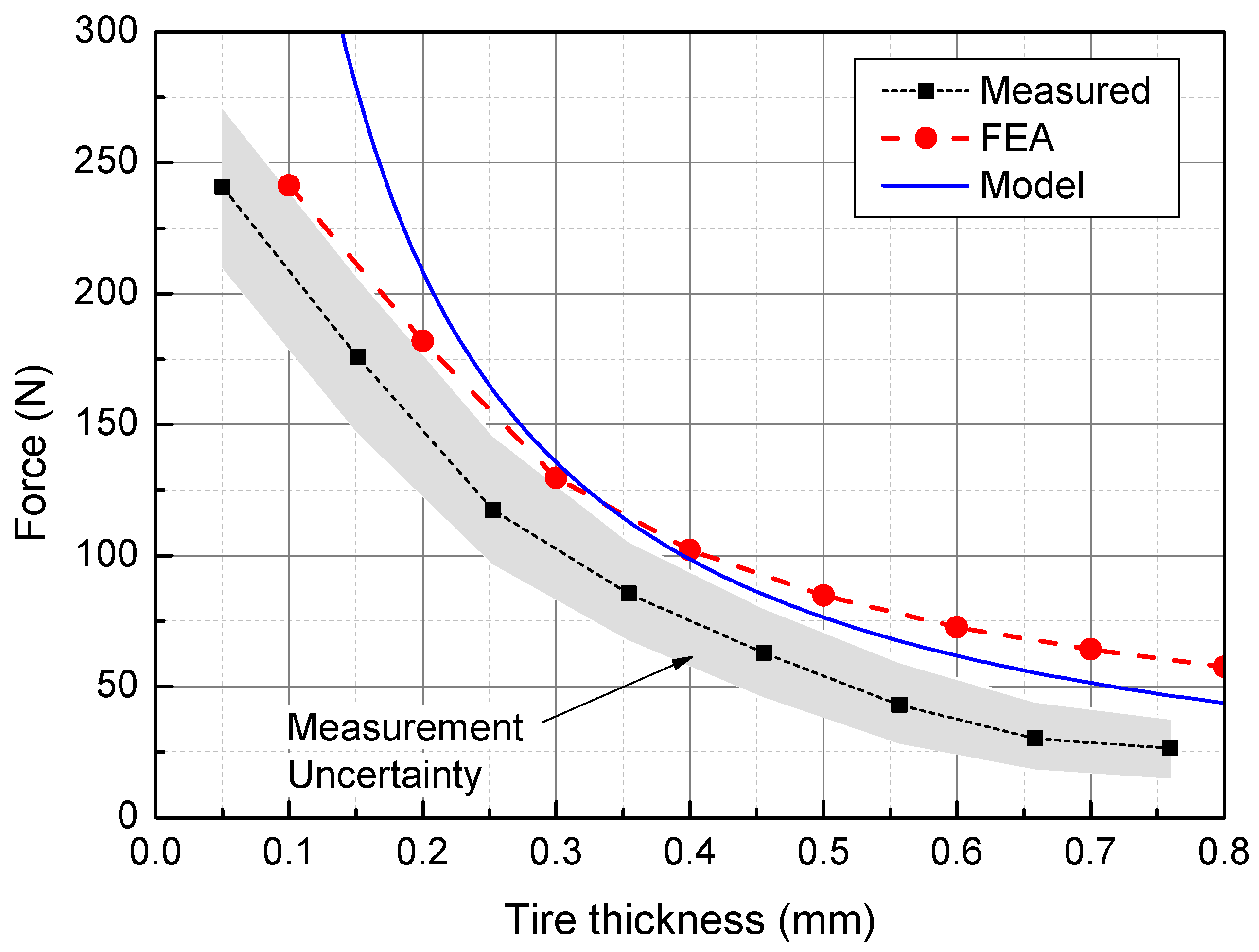
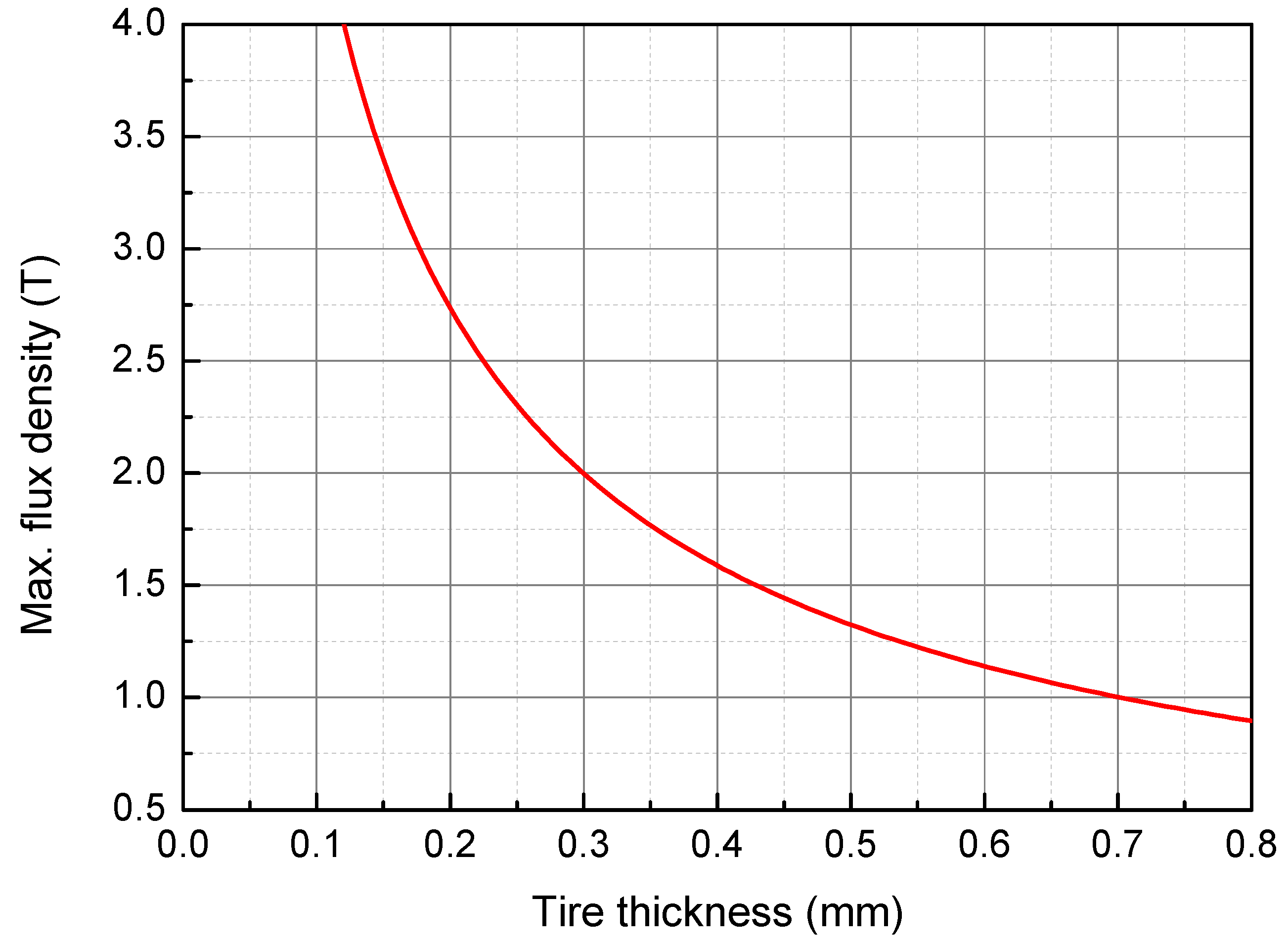
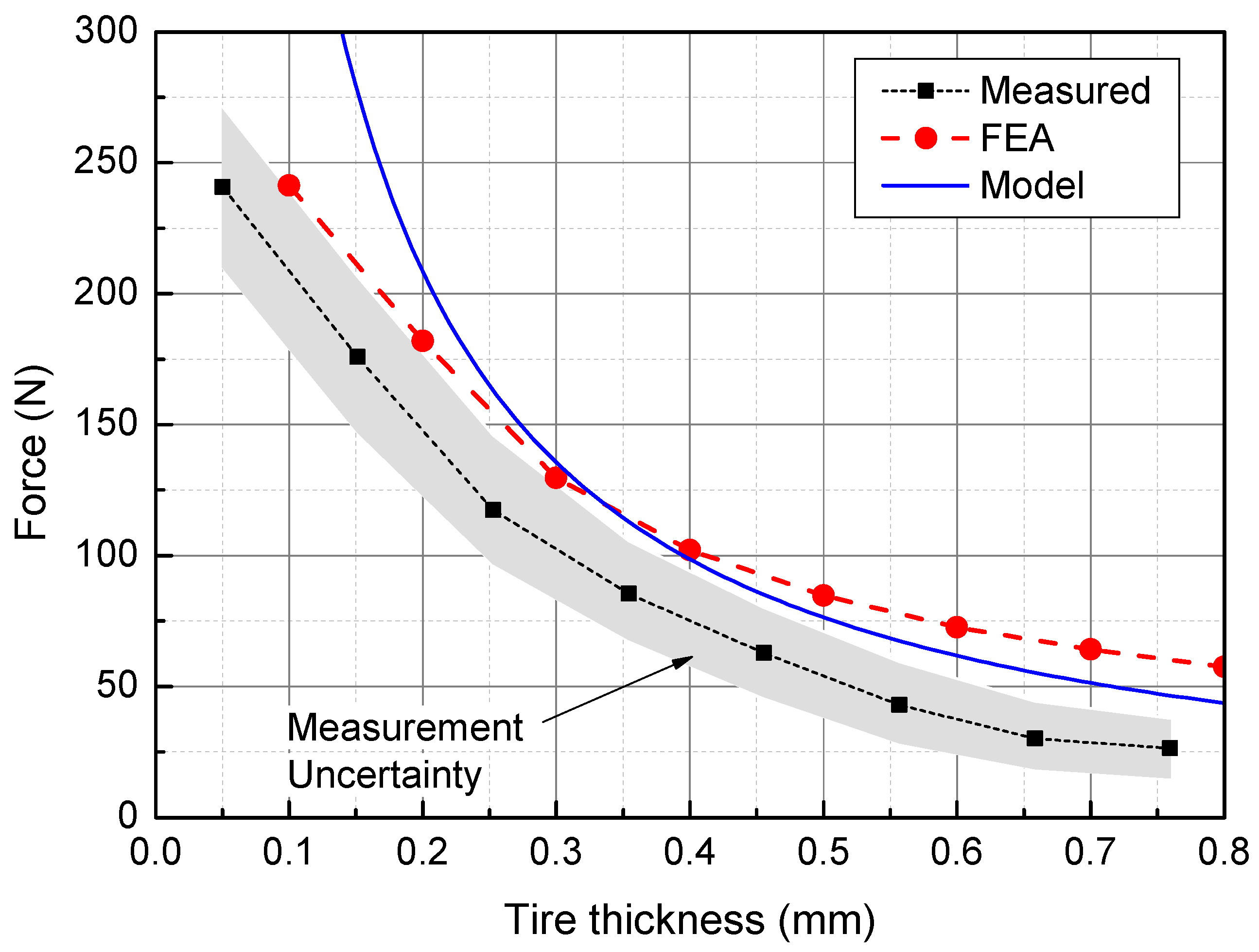
3.3. Validation Results
4. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Briones, L.; Bustamante, P.; Serna, M.A. Robicen: A wall-climbing pneumatic robot for inspection in nuclear power plants. Robot Cim.-Int. Manuf. 1994, 11, 287–292. [Google Scholar] [CrossRef]
- Han, S.C.; Kim, J.; Yi, H.C. A novel design of permanent magnet wheel with induction pin for mobile robot. Int. J. Precis. Eng. Man. 2009, 10, 143. [Google Scholar] [CrossRef]
- Wu, M.; Gao, X.; Yan, W.; Fu, Z.; Zhao, Y.; Chen, S. New mechanism to pass obstacles for magnetic climbing robots with high payload, using only one motor for force-changing and wheel-lifting. Ind. Robot 2011, 38, 372–380. [Google Scholar] [CrossRef]
- Yoon, K.H.; Park, Y.W. Controllability of magnetic force in magnetic wheels. IEEE T. Magn. 2012, 48, 4046–4049. [Google Scholar] [CrossRef]
- Tâche, F.; Fischer, W.; Caprari, G.; Siegwart, R.; Moser, R.; Mondada, F. Magnebike: A magnetic wheeled robot with high mobility for inspecting complex-shaped structures. J. Field Robot 2009, 26, 453–476. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Analysis and design optimization of a permanent magnet synchronous motor for a campus patrol electric vehicle. IEEE T. Ven. Technol. 2019, 68, 10535–10544. [Google Scholar] [CrossRef]
- Xu, Z.; Ma, P. A wall-climbing robot for labelling scale of oil tank’s volume. Robotica 2002, 20, 209–212. [Google Scholar] [CrossRef]
- Kindl, V.; Hruska, K.; Pechanek, R.; Skala, B. Redesign of an Undercarriage Wheel for a Self-Acting Robot. IEEE T. Magn. 2016, 52, 1–5. [Google Scholar] [CrossRef]
- Chai, H.D. Electromechanical Motion Devices; Prentice Hall: Upper Sadr River, NJ, USA, 1998. [Google Scholar]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices; Academic Press: San Diego, CA, USA, 2001. [Google Scholar]
- Groover, M.P. Fundamentals of Modern Manufacturing; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Radius of wheel | R | 75 | mm |
| Width of wheel | w | 9 | mm |
| PM axial length | 58 | mm | |
| PM cross-sectional area | 625 | mm | |
| PM coercitivity | 995 | kA/m | |
| Angle limit | 60 | deg. | |
| PM/Axle clearance | 4 | mm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, M.; Kwon, E.; Park, S.H.; Park, Y.-W. Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot. Actuators 2020, 9, 67. https://doi.org/10.3390/act9030067
Noh M, Kwon E, Park SH, Park Y-W. Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot. Actuators. 2020; 9(3):67. https://doi.org/10.3390/act9030067
Chicago/Turabian StyleNoh, Myounggyu, Eunsang Kwon, So Hee Park, and Young-Woo Park. 2020. "Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot" Actuators 9, no. 3: 67. https://doi.org/10.3390/act9030067
APA StyleNoh, M., Kwon, E., Park, S. H., & Park, Y.-W. (2020). Modeling of Attractive Force by Magnetic Wheel Used for Mobile Robot. Actuators, 9(3), 67. https://doi.org/10.3390/act9030067