A Driftless Estimation of Orthogonal Magnetic Flux Linkages in Sensorless Electrical Drives

Abstract
1. Introduction
2. An Electromagnetic Model of a PMSM
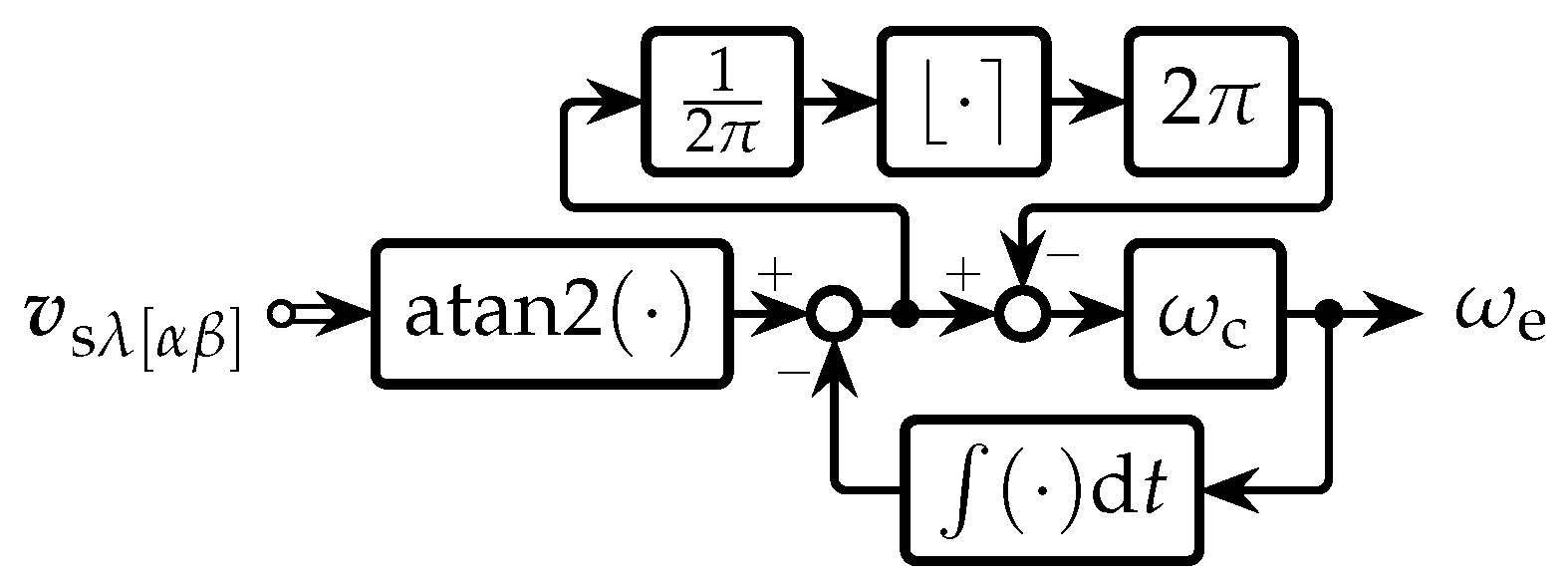
2.1. The Angular Position and Speed of the Rotor
3. The Problem of the Drift
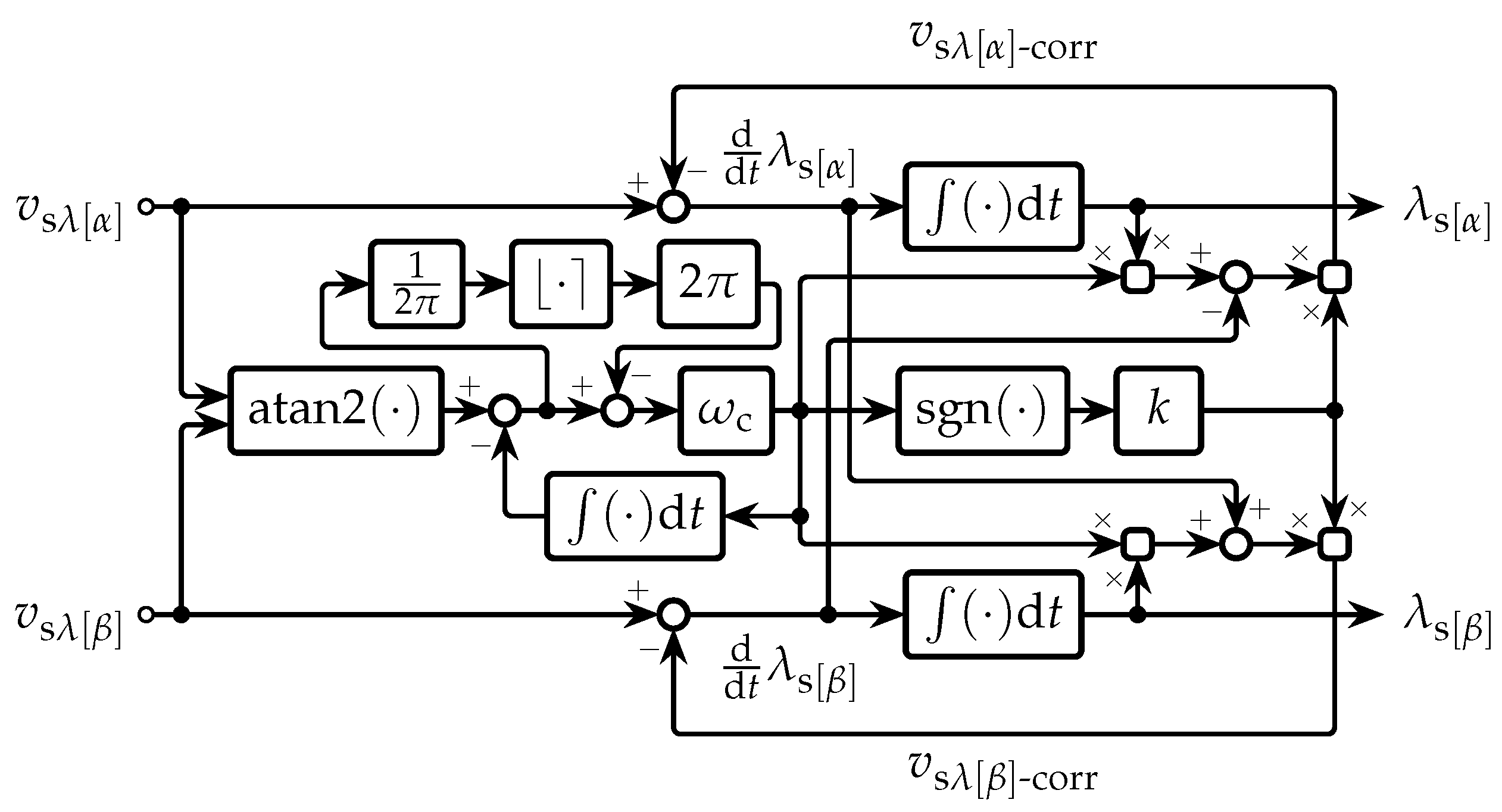
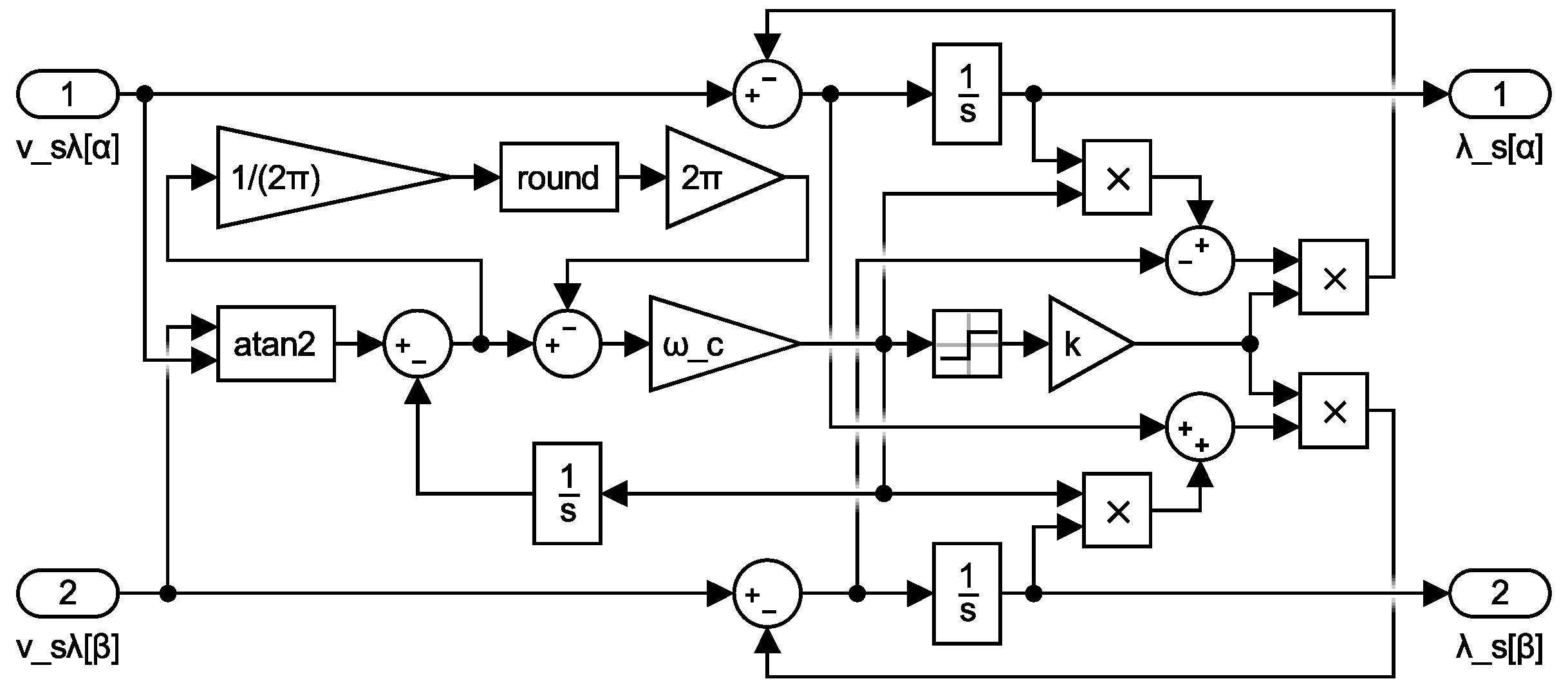
3.1. A Solution to the Problem
3.2. The Stability of the Proposed Compensation of the Drift
4. Results of Simulations of the Proposed Compensation
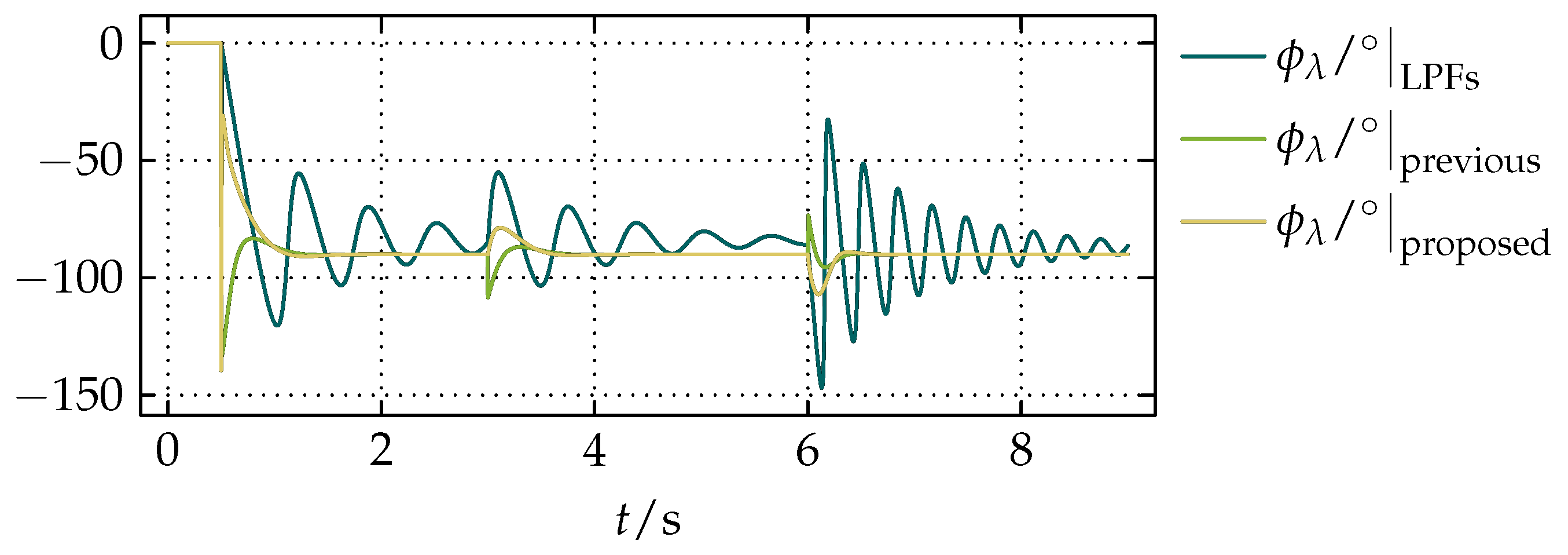
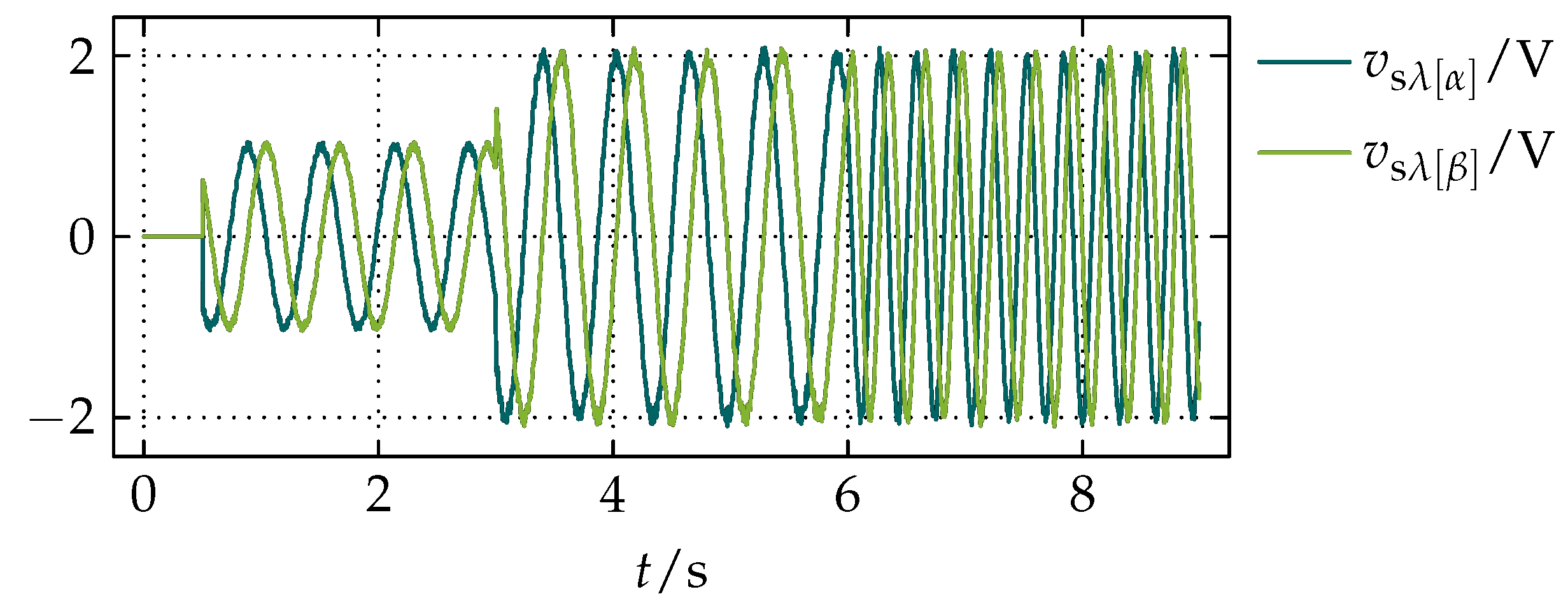
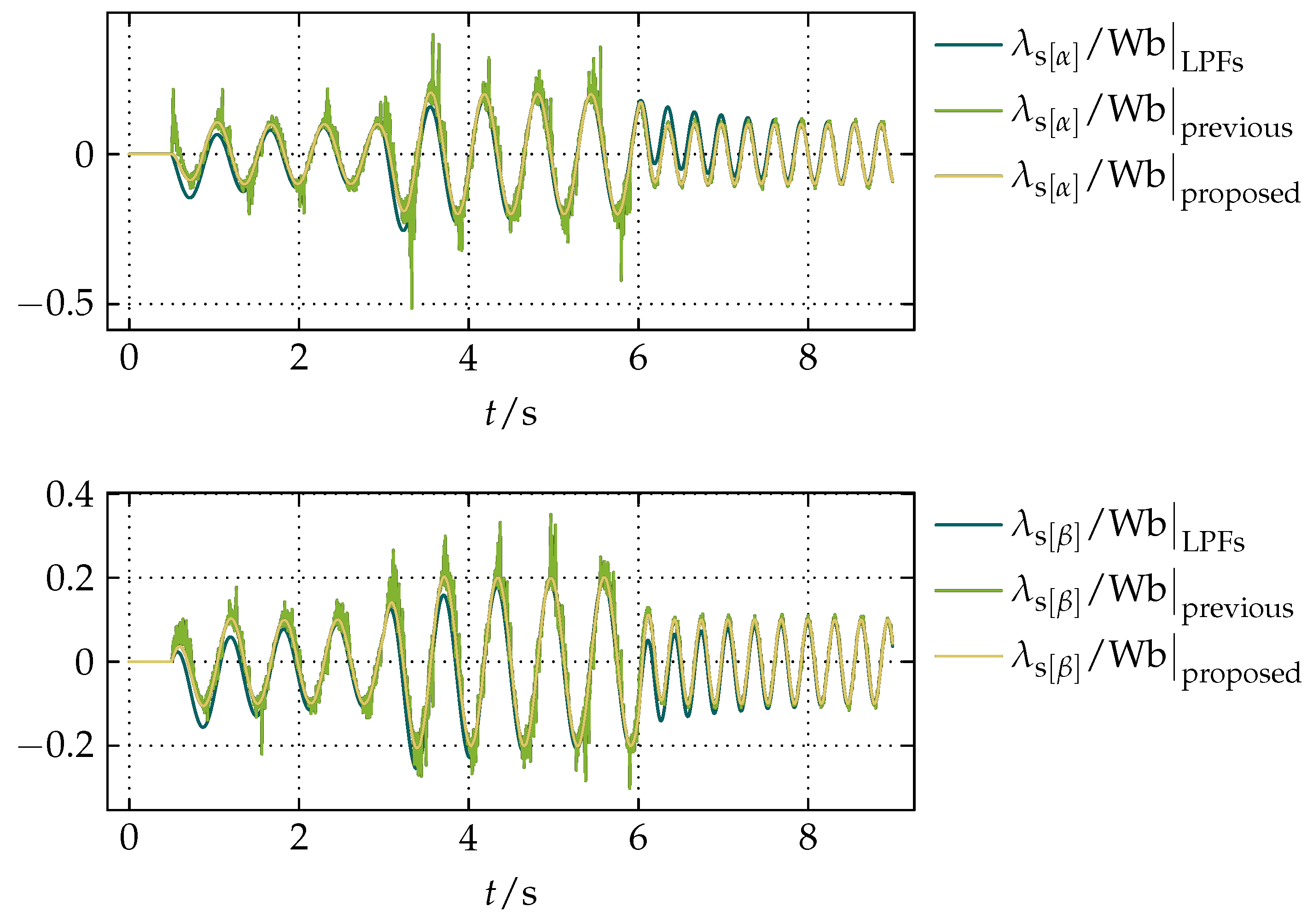
Results of Comparative Simulations of the Proposed Compensation and Referred Methods
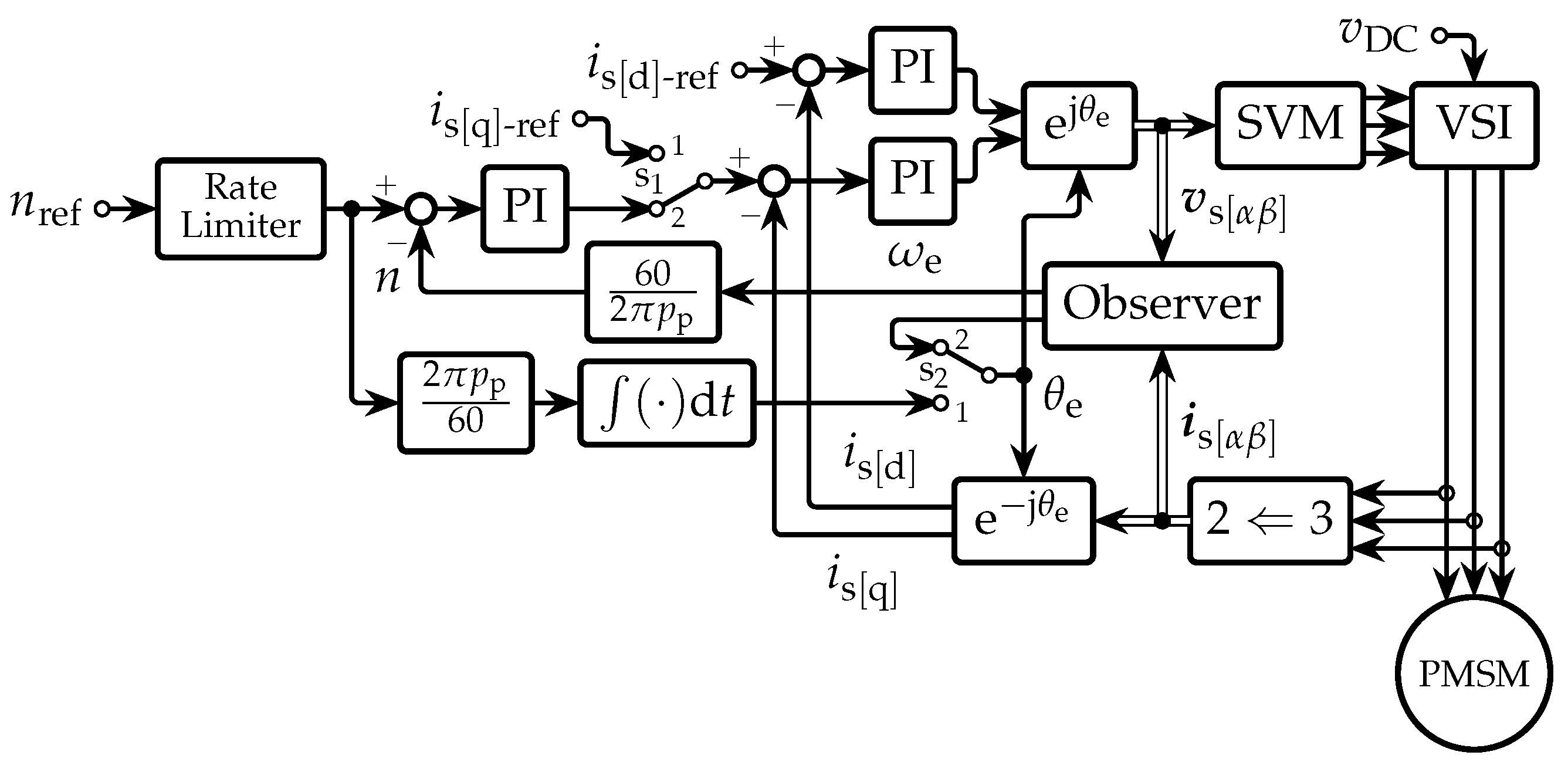
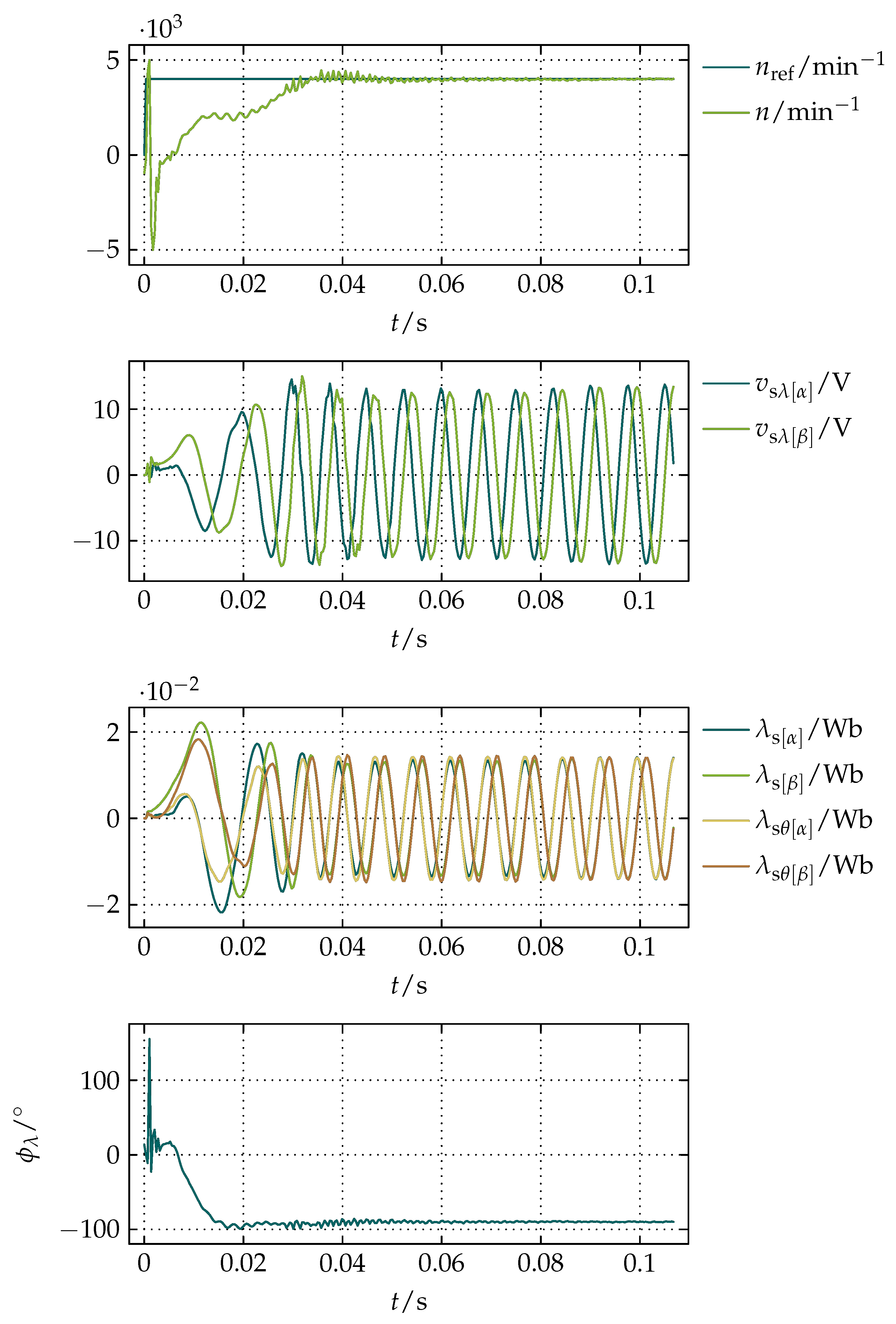
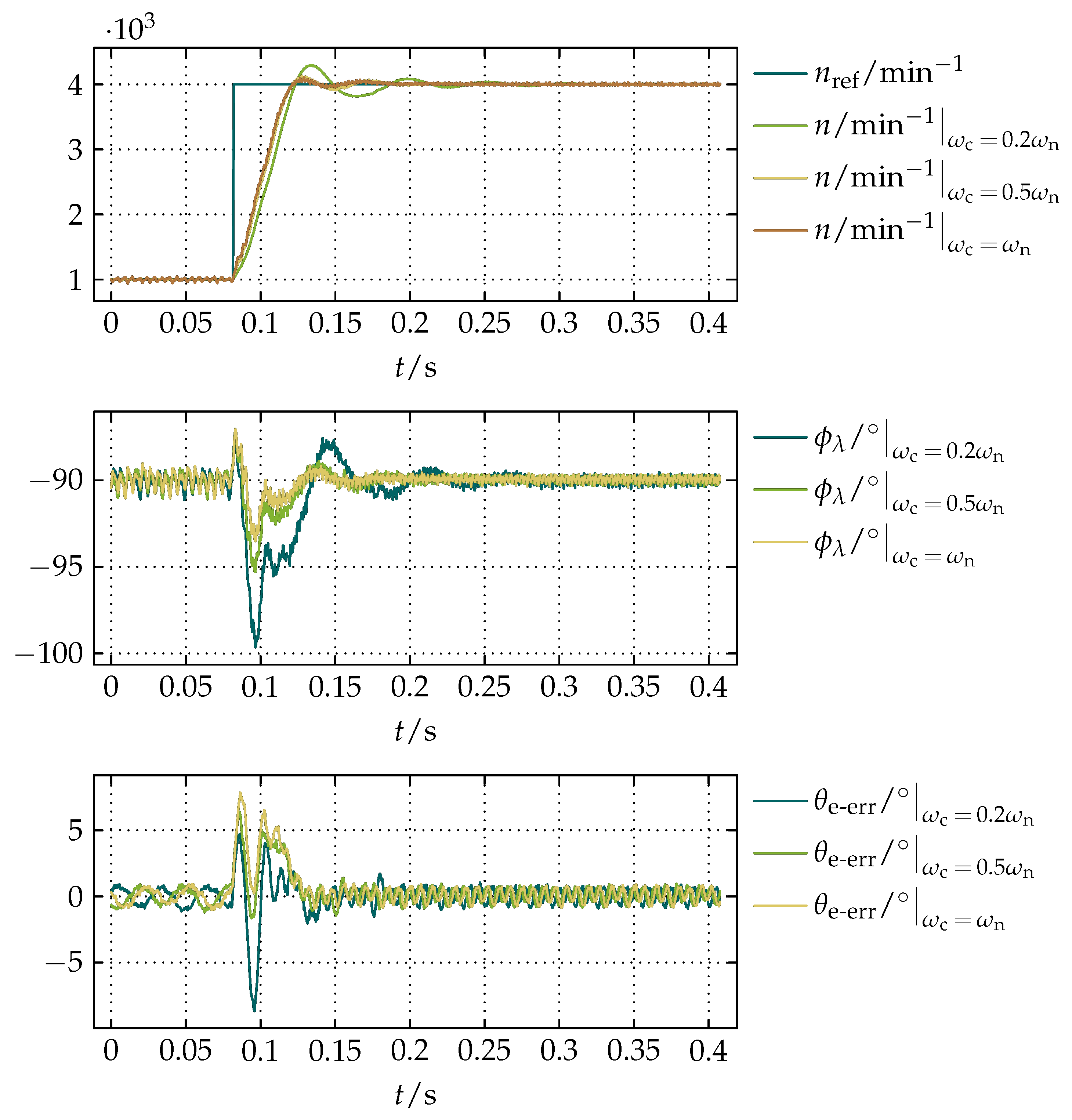
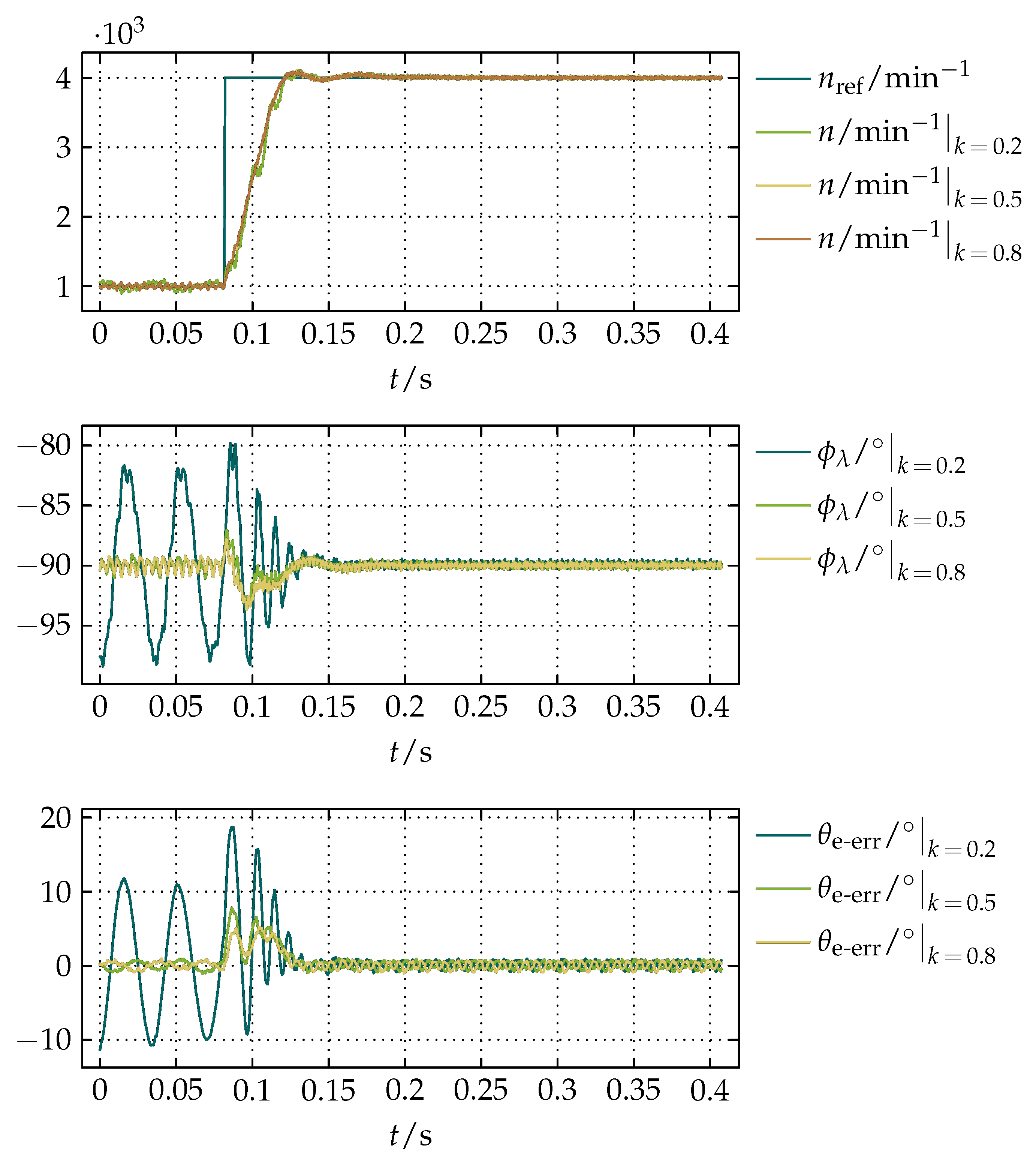
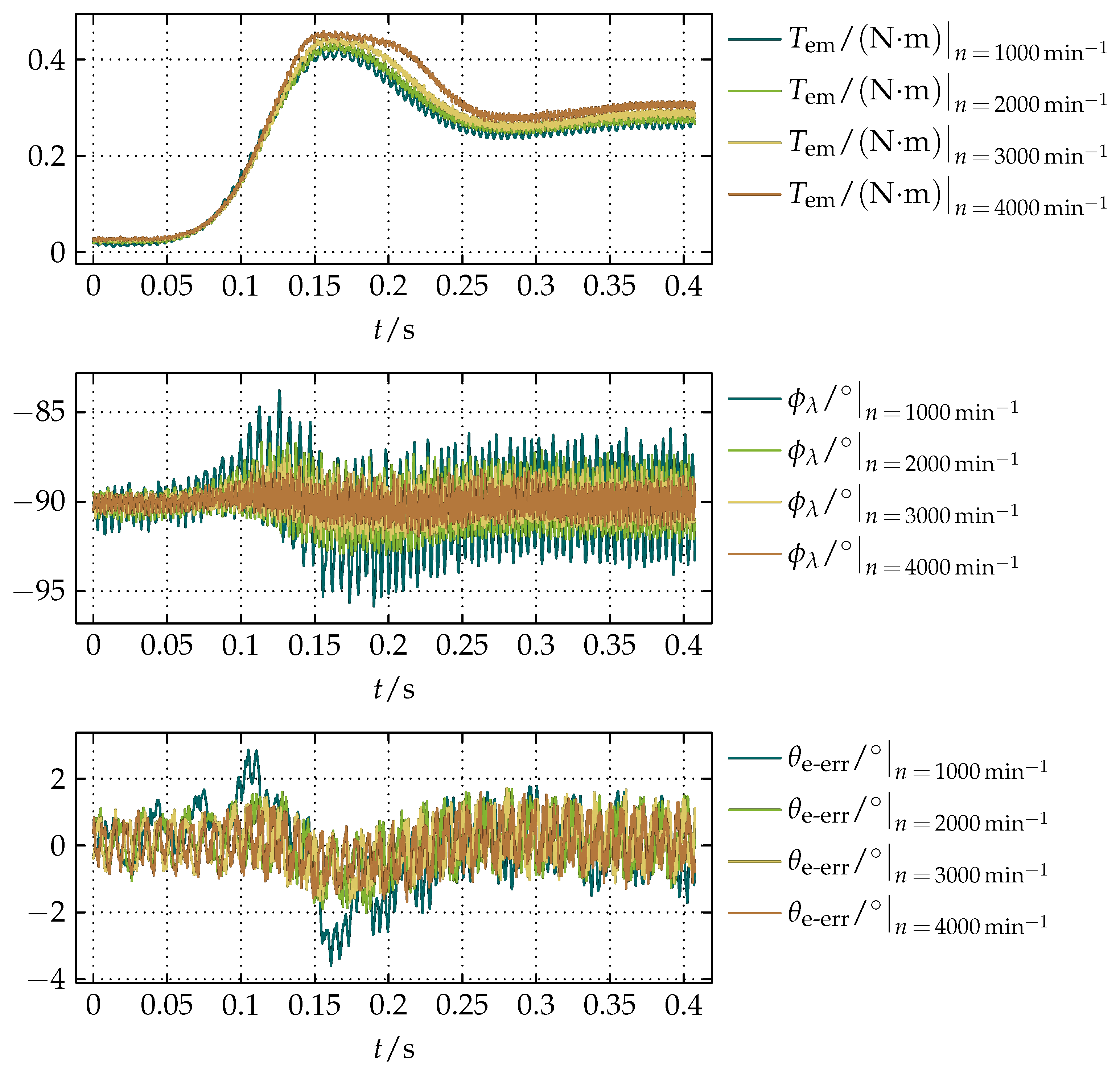
5. Results of Experiments of the Proposed Compensation within the Sensorless FOC of a PMSM
6. Conclusions
- is efficiently designed to be computationally suitable for inexpensive applications;
- for its operation requires only two periodic orthogonal input waveforms with a distinct common fundamental harmonic;
- is completely independent of the type and parameters of the used machine;
- provides correct values of and in steady states;
- has dynamics adjustable by and k, which provide a fine-tuning without affecting and in steady states;
- can be used within the DTC and the sensorless FOC, or any other system that satisfies the requirement of orthogonality stated in the second point.
Funding
Conflicts of Interest
Abbreviations
| the frame of reference fixed to the geometry of the stator | |
| dq | the frame of reference fixed to the magnetic flux of the rotor |
| DSP | digital signal processor |
| DTC | direct torque control |
| FOC | field-oriented control |
| HPF | high-pass filter |
| LPF | low-pass filter |
| MIMO | multiple input–multiple output |
| MOSFET | metal-oxide-semiconductor field-effect transistor |
| PI | proportional-integral controller |
| PLL | phase-locked loop |
| PMSM | permanent magnet synchronous machine |
| SCIM | squirrel cage induction machine |
| SVM | space-vector modulation |
| VFED | variable frequency electrical drives |
| VSI | voltage source inverter |
Nomenclature
| the state matrix | |
| the input matrix | |
| the electrical angular displacement of a direct axis of the synchronous magnetic flux of the stator from the subsequent direct axis of the magnetic flux of the rotor | |
| the base of natural logarithms | |
| a spatial phasor of electrical or magnetic quantities of the stationary windings | |
| a scalar function of an electrical or magnetic quantity of the stationary winding a | |
| a scalar function of an electrical or magnetic quantity of the stationary winding b | |
| a scalar function of an electrical or magnetic quantity of the stationary winding c | |
| the spatial phasor of the electrical currents in the stationary windings | |
| the projection of onto | |
| the complex conjugate of | |
| the magnitude of the zeroth harmonic of | |
| the projection of onto | |
| the complex conjugate of | |
| the direct component of | |
| the direct component of | |
| the quadrature component of | |
| the quadrature component of | |
| the direct component of | |
| the reference of | |
| the quadrature component of | |
| the reference of | |
| the magnitude of the fundamental harmonic of each electrical current in each of the stationary windings | |
| the imaginary unit | |
| k | the gain of the compensation loop |
| the stray inductance of each stationary winding | |
| the magnitude of the zeroth harmonic with respect to of the salient inductance of each stationary winding | |
| the magnitude of the second harmonic with respect to of the salient inductance of each stationary winding | |
| the total amount of with in | |
| the amount of in | |
| the direct synchronous inductance of the stationary windings | |
| the quadrature synchronous inductance of the stationary windings | |
| the spatial phasor of the total magnetic flux linkage of the stationary windings | |
| the projection of onto | |
| the projection of the component of whose argument equals onto | |
| the magnetic flux linkage between the stationary windings and the permanent magnets of the rotor | |
| the direct component of | |
| the quadrature component of | |
| the direct component of | |
| the quadrature component of | |
| the magnitude of | |
| n | the mechanical speed of the rotor |
| the reference of n | |
| the electrical angular speed of the rotor | |
| the cut-off frequency of the low-pass filter for the filtering of | |
| the nominal electrical angular speed of the machine | |
| a square matrix | |
| the element in the first row and the first column of | |
| the element in the second row and the second column of | |
| the number of pole pairs | |
| the angular shift in the phase of with respect to | |
| the angular shift in the phase of with respect to the spatial phasor of the voltage equivalent to the uncompensated derivative of with respect to t | |
| a quadratic Lyapunov equation | |
| the electrical resistance of each stationary winding | |
| an arbitrary electrical angular position | |
| t | time |
| the electromagnetic torque | |
| the nominal torque | |
| the electrical angular position of the rotor | |
| the actual electrical angular position of the rotor | |
| the error in | |
| the input vector | |
| a quadratic Lyapunov function candidate | |
| the spatial phasor of the voltages across the stationary windings | |
| the projection of onto | |
| the magnitude of the zeroth harmonic of | |
| the direct component of | |
| the quadrature component of | |
| the magnitude of the fundamental harmonic of each voltage across each of the stationary windings | |
| the voltage equivalent to the uncompensated derivative of with respect to t | |
| the correction of the drift in expressed at the level of | |
| the voltage equivalent to the uncompensated derivative of with respect to t | |
| the correction of the drift in expressed at the level of | |
| the magnitude of and | |
| the state vector |
References
- Buja, G.S.; Kazmierkowski, M.P. Direct Torque Control of PWM Inverter-Fed AC Motors—A Survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, Z.; Qiao, W.; Wu, L. An Extended Flux Model-Based Rotor Position Estimator for Sensorless Control of Salient-Pole Permanent-Magnet Synchronous Machines. IEEE Trans. Power Electron. 2015, 30, 4412–4422. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless Control of Induction Motor Drives. Proc. IEEE 2002, 90, 1359–1394. [Google Scholar] [CrossRef]
- Seyoum, D.; Grantham, C.; Rahman, M.F. Simplified Flux Estimation for Control Application in Induction Machines. In Proceedings of the 2003 IEEE International Electric Machines and Drives Conference (IEMDC’03), Madison, WI, USA, 1–4 June 2003; pp. 691–695. [Google Scholar]
- Koteich, M. Flux Estimation Algorithms for Electric Drives: A Comparative Study. In Proceedings of the 2016 3rd International Conference on Renewable Energies for Developing Countries (REDEC), Zouk Mosbeh, Lebanon, 13–15 July 2016. [Google Scholar]
- Čolović, I.; Kutija, M.; Sumina, D. Rotor Flux Estimation for Speed Sensorless Induction Generator Used in Wind Power Application. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014; pp. 23–27. [Google Scholar]
- Pellegrino, G.; Bojoi, R.I.; Guglielmi, P. Unified Direct-Flux Vector Control for AC Motor Drives. IEEE Trans. Ind. Appl. 2011, 47, 2093–2102. [Google Scholar] [CrossRef]
- Idris, N.R.N.; Yatim, A.H.M. An Improved Stator Flux Estimation in Steady-State Operation for Direct Torque Control of Induction Machines. IEEE Trans. Ind. Appl. 2002, 38, 110–116. [Google Scholar] [CrossRef]
- Shen, J.X.; Hao, H.; Wang, C.F.; Jin, M.J. Sensorless Control of IPMSM Using Rotor Flux Observer. Int. J. Comput. Math. Electr. Electron. Eng. 2012, 32, 166–181. [Google Scholar] [CrossRef]
- Zhang, X.; Qu, W.; Lu, H. A New Integrator for Voltage Model Flux Estimation in a Digital DTC System. In Proceedings of the 2006 IEEE Region 10 Conference (TENCON 2006), Hong Kong, China, 14–17 November 2006. [Google Scholar]
- Xia, C.; Zhao, J.; Yan, Y.; Shi, T. A Novel Direct Torque Control of Matrix Converter-Fed PMSM Drives Using Duty Cycle Control for Torque Ripple Reduction. IEEE Trans. Ind. Electron. 2014, 61, 2700–2713. [Google Scholar] [CrossRef]
- Bose, B.K.; Patel, N.R. A Programmable Cascaded Low-Pass Filter-Based Flux Synthesis for a Stator Flux-Oriented Vector-Controlled Induction Motor Drive. IEEE Trans. Ind. Electron. 1997, 44, 140–143. [Google Scholar] [CrossRef]
- Norniella, J.G.; Cano, J.M.; Orcajo, G.A.; Rojas, C.H.; Pedrayes, J.F.; Cabanas, M.F.; Melero, M.G. Improving the Dynamics of Virtual-Flux-Based Control of Three-Phase Active Rectifiers. IEEE Trans. Ind. Electron. 2014, 61, 177–187. [Google Scholar] [CrossRef]
- Shin, M.H.; Hyun, D.S.; Cho, S.B.; Choe, S.Y. An Improved Stator Flux Estimation for Speed Sensorless Stator Flux Orientation Control of Induction Motors. IEEE Trans. Power Electron. 2000, 15, 312–318. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A Discrete-Time Direct-Torque and Flux Control for Direct-Drive PMSG Wind Turbines. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013. [Google Scholar]
- Stojić, D.; Milinković, M.; Veinović, S.; Klasnić, I. Improved Stator Flux Estimator for Speed Sensorless Induction Motor Drives. IEEE Trans. Power Electron. 2014, 30, 2363–2371. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Luomi, J. Modified Integrator for Voltage Model Flux Estimation of Induction Motors. IEEE Trans. Ind. Electron. 2003, 50, 818–820. [Google Scholar] [CrossRef]
- Hu, J.; Wu, B. New Integration Algorithms for Estimating Motor Flux over a Wide Speed Range. IEEE Trans. Power Electron. 1998, 13, 969–977. [Google Scholar] [CrossRef]
- Hurst, K.D.; Habetler, T.G.; Griva, G.; Profumo, F. Zero-Speed Tacholess IM Torque Control: Simply a Matter of Stator Voltage Integration. IEEE Trans. Ind. Appl. 1998, 34, 790–795. [Google Scholar] [CrossRef]
- Cho, K.R.; Seok, J.K. Pure-Integration-Based Flux Acquisition with Drift and Residual Error Compensation at a Low Stator Frequency. IEEE Trans. Ind. Appl. 2009, 45, 1276–1285. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless Control of Induction Machines–with or without Signal Injection? IEEE Trans. Ind. Electron. 2006, 53, 7–30. [Google Scholar] [CrossRef]
- Holtz, J.; Quan, J. Drift- and Parameter-Compensated Flux Estimator for Persistent Zero-Stator-Frequency Operation of Sensorless-Controlled Induction Motors. IEEE Trans. Ind. Appl. 2003, 39, 1052–1060. [Google Scholar] [CrossRef]
- Strinić, T.; Silber, S.; Gruber, W. The Flux-Based Sensorless Field-Oriented Control of Permanent Magnet Synchronous Motors without Integrational Drift. Actuators 2018, 7, 35. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems, 2nd ed.; John Wiley and Sons: New York, NY, USA, 2002; ISBN 0-471-14326-X. [Google Scholar]
- Imaeda, Y.; Doki, S.; Hasegawa, M.; Matsui, K.; Tomita, M.; Ohnuma, T. PMSM Position Sensorless Control with Extended Flux Observer. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2013. [Google Scholar]
- Boldea, I.; Paicu, M.C.; Andreescu, G.-D. Active Flux Concept for Motion-Sensorless Unified AC Drives. IEEE Trans. Power Electron. 2008, 23, 2612–2618. [Google Scholar] [CrossRef]
- Paicu, M.C.; Boldea, I.; Andreescu, G.-D.; Blaabjerg, F. Very Low Speed Performance of Active Flux Based Sensorless Control: Interior Permanent Magnet Synchronous Motor Vector Control versus Direct Torque and Flux Control. IET Electr. Power Appl. 2009, 3, 551–561. [Google Scholar] [CrossRef]
- Yuan, Q.; Yang, Z.-P.; Lin, F.; Sun, H. Sensorless Control of Permanent Magnet Synchronous Motor with Stator Flux Estimation. J. Comput. 2013, 8, 108–112. [Google Scholar] [CrossRef]
- Mercorelli, P. Parameters Identification in a Permanent Magnet Three-Phase Synchronous Motor of a City-Bus for an Intelligent Drive Assistant. Int. J. Model. Identif. Control 2014, 21, 352–361. [Google Scholar] [CrossRef]
- Hangos, K.M.; Bokor, J.; Szederkényi, G. Analysis and Control of Nonlinear Process Systems; Springer: London, UK, 2004; ISBN 1-85233-600-5. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| DC-Link Voltage | 24.00 | V | |
| Nominal Mechanical Speed | 4000.00 | ||
| Nominal Torque | 0.36 | ||
| Number of Pole Pairs | 2.00 | ||
| Stator Resistance | 0.15 | ||
| Direct Synchronous Inductance | 0.39 | ||
| Quadrature Synchronous Inductance | 0.59 | ||
| Rotor Flux Constant | 14.78 |
© 2018 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Strinić, T. A Driftless Estimation of Orthogonal Magnetic Flux Linkages in Sensorless Electrical Drives. Actuators 2018, 7, 63. https://doi.org/10.3390/act7040063
Strinić T. A Driftless Estimation of Orthogonal Magnetic Flux Linkages in Sensorless Electrical Drives. Actuators. 2018; 7(4):63. https://doi.org/10.3390/act7040063
Chicago/Turabian StyleStrinić, Tomislav. 2018. "A Driftless Estimation of Orthogonal Magnetic Flux Linkages in Sensorless Electrical Drives" Actuators 7, no. 4: 63. https://doi.org/10.3390/act7040063
APA StyleStrinić, T. (2018). A Driftless Estimation of Orthogonal Magnetic Flux Linkages in Sensorless Electrical Drives. Actuators, 7(4), 63. https://doi.org/10.3390/act7040063