
Mechanism Analysis and Optimal Design of Return Impact of a Certain Aircraft Canopy Actuator


Abstract
1. Introduction
2. Analysis of the Failure Mechanism
2.1. Working Principle of the Gas–Liquid Control System of the Canopy Cover Actuator
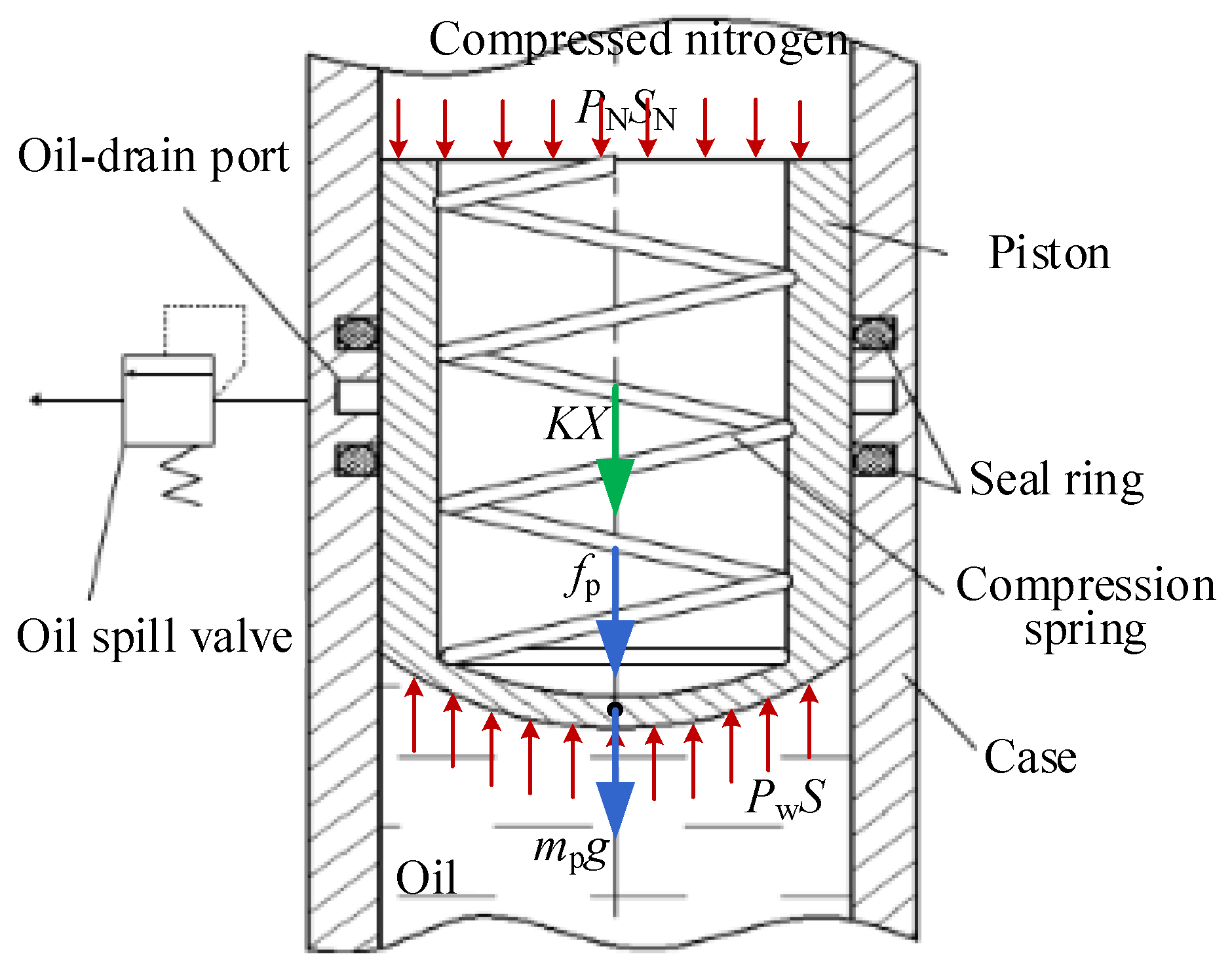
2.2. The Transmission Path and Mathematical Model Construction of the Return Pressure Impact of the Canopy Actuator
3. Simulation Analysis of Return Pressure Impact of Canopy Actuator
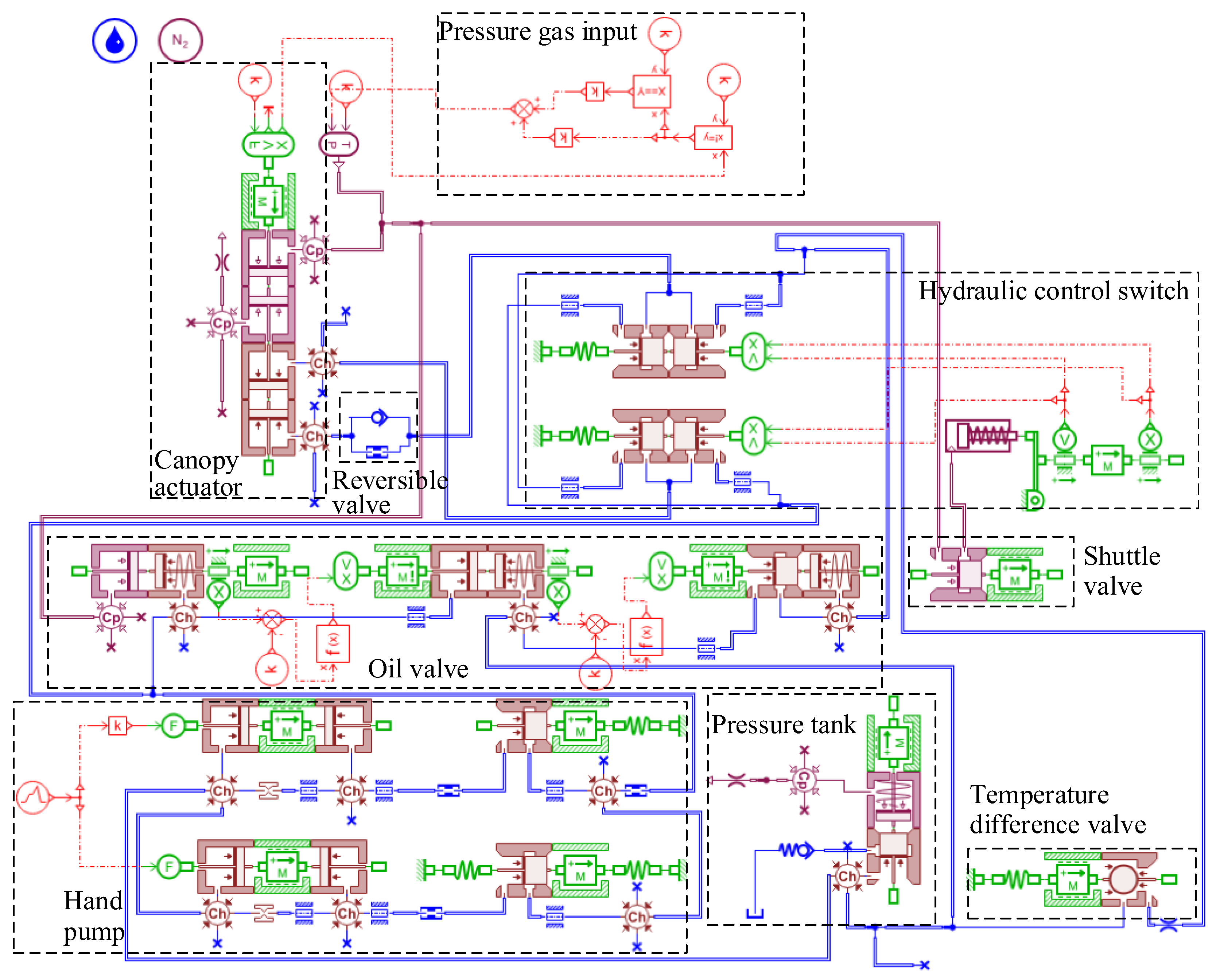
3.1. Construction of Simulation Model of Gas–Liquid Control System
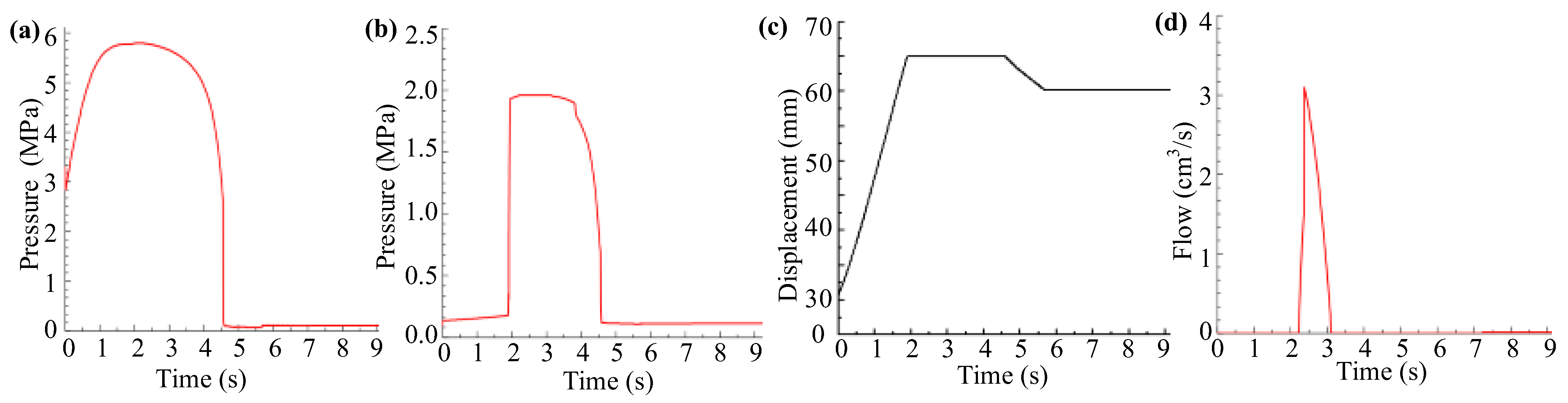
3.2. Simulation Analysis of Return Pressure Impact of Actuator
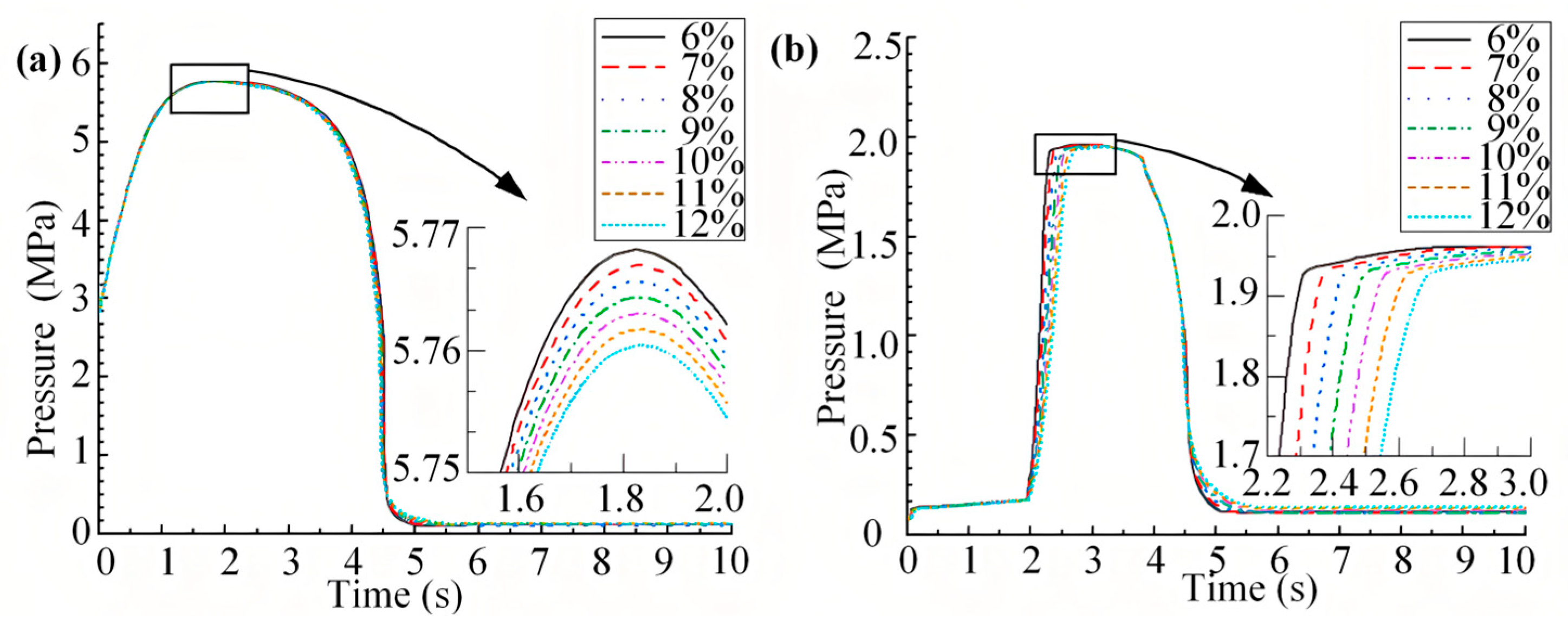
3.3. Analysis of Parameters Affecting the Return Pressure Impact
3.4. Analysis of the Influence of the Sinking Amount of the Actuator on the Impact of the Return Pressure
4. Optimization Design and Analysis of the Return Pressure Impact of the Actuator
4.1. Optimize the Diameter of the Reversible Valve Orifice
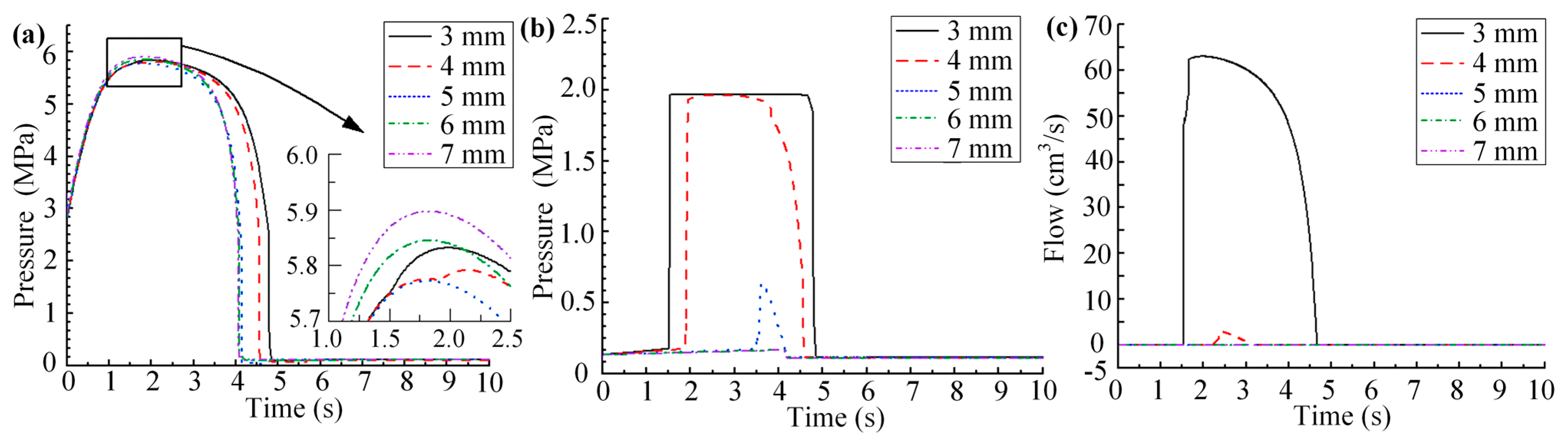
4.2. Optimize the Inner Diameter of the Pipeline Connected to the Upper Hydraulic Chamber
4.3. Optimize the Inner Diameter of the Pipeline Connected to the Lower Hydraulic Chamber
5. The Influence of the Optimization Scheme on the Extension Time of the Canopy Actuator
5.1. Simulation Results and Analysis of the Extension of the Canopy Actuator
5.2. Comparison of Optimization Schemes
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barimani-Varandi, A.; Nasrabadi, M.K.; Ravan, B.A.; Javadi, M. Rapid prototyping of aircraft canopy based on the incremental forming process. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 59. [Google Scholar] [CrossRef]
- Wang, X.K.; Wei, S.C.; Xu, B.S.; Chen, Y.; Yan, X.; Xia, H.H. Transparent organic materials of aircraft cockpit canopies: Research status and development trends. Mater. Res. Innov. 2015, 19, S10–S199. [Google Scholar] [CrossRef]
- Jamisola, R.S.; Oetomo, D.N.; Ang, M.H.; Khatib, O.; Lim, T.M.; Lim, S.Y. Compliant motion using a mobile manipulator: An operational space formulation approach to aircraft canopy polishing. Adv. Robot. 2005, 19, 613–634. [Google Scholar] [CrossRef]
- Lanciotti, A.; Mantelli, R. New configurations for the windshield and the canopy for a two-seater trainer military aircraft. Aircr. Eng. Aerosp. Technol. 2003, 75, 156–163. [Google Scholar] [CrossRef]
- Wang, Y.G.; Qi, T.; Li, H.F. Fault Analysis of Excessive Sinking for a Certain Air-craft Canopy. Aviat. Maint. Eng. 2023, 110–112. [Google Scholar] [CrossRef]
- Tyvand, P.A.; Solbakken, K.M.; Hjelmervik, K.B. Incompressible impulsive wall impact of liquid bodies. Eur. J. Mech. B/Fluids 2014, 47, 202–210. [Google Scholar] [CrossRef]
- Meirmanov, A.; Nekrasova, I. Mathematical models of a hydraulic shock. J. Math. Anal. Appl. 2013, 408, 76–90. [Google Scholar] [CrossRef]
- Cooker, M.J.; Peregrine, D.H. Pressure-impulse theory for liquid impact problems. J. Fluid Mech. 1995, 297, 193–214. [Google Scholar] [CrossRef]
- Garg, R.K.; Kumar, A. Experimental and numerical investigations of water hammer analysis in pipeline with two different materials and their combined configuration. Int. J. Press. Vessel. Pip. 2020, 188, 104219. [Google Scholar] [CrossRef]
- Chang, S.; Ye, M.; Zhang, D.; Ma, Y.; Zhang, J. Impact performance optimization for hydraulic rock drill based on stroke and flow compensation factors. Adv. Mech. Eng. 2024, 16, 1689672763. [Google Scholar] [CrossRef]
- Meng, X.; Zhang, Z.; Sheng, K.; Yu, C.; Huang, H.; Chen, S.; Li, Y. Modeling and experimental evaluation of vibration reduction of hydraulic-driven joint with a MRF damper. J. Intell. Mater. Syst. Struct. 2022, 34, 251–260. [Google Scholar] [CrossRef]
- Maia Neto, M.; Góes, L.C.S. Use of LMS Amesim® model and a bond graph support to predict behavior impacts of typical failures in an aircraft hydraulic brake system. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 414. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Z.; Lin, J.; Wang, W. Sensitivity analysis of one-dimensional water hammer model in pump-pipeline systems. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 504. [Google Scholar] [CrossRef]
- Hjelmervik, K.B.; Tyvand, P.A. Incompressible impulsive wall impact of liquid cylinders. J. Eng. Math. 2017, 103, 159–171. [Google Scholar] [CrossRef]
- Yang, S.; Ou, Y.; Guo, Y.; Wu, X. Analysis and optimization of the working parameters of the impact mechanism of hydraulic rock drill based on a numerical simulation. Int. J. Precis. Eng. Manuf. 2017, 18, 971–977. [Google Scholar] [CrossRef]
- Ren, Q.; Kou, Z.; Wu, J.; Li, T.; Yahya, W. Development and parametric analysis of vibration system controlled by hydraulic shock rotary vibrator. Shock Vib. 2021, 2021, 1082963. [Google Scholar] [CrossRef]
- Abebe, A.; Tadesse, Y.; Beyene, A. Conversion of Thermally Amplified Hydraulic Shock for Power Generation: Modeling and Experimental Analyses. J. Energy Resour. Technol. 2023, 145, 22103. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Jing, H.; Bergant, A.; Stosiak, M.; Lubecki, M. Progress in Analytical Modeling of Water Hammer. J. Fluids Eng. 2023, 145, 081203. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Deptuła, A.; Karpenko, M. Navier-Stokes Solutions for Accelerating Pipe Flow—A Review of Analytical Models. Energies 2023, 16, 1407. [Google Scholar] [CrossRef]
- Brühl, M. Analytical Solution for Laminar Water Hammer With Frequency-Dependent Friction. J. Fluids Eng. 2022, 144, 111302. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Karpenko, M.; Bogdevičius, M. Developments in analytical wall shear stress modelling for water hammer phenomena. J. Sound Vibr. 2023, 562, 117848. [Google Scholar] [CrossRef]
- García-García, F.J.; Fariñas-Alvariño, P. On the analytical solution of transient friction in channel flows. Appl. Math. Mech. 2024, 45, 1447–1466. [Google Scholar] [CrossRef]
- Plouraboué, F. Review on water-hammer waves mechanical and theoretical foundations. Eur. J. Mech. B/Fluids 2024, 108, 237–271. [Google Scholar] [CrossRef]
- Miao, D.; Zhang, J.; Chen, S.; Yu, X. Water hammer suppression for long distance water supply systems by combining the air vessel and valve. J. Water Supply Res. Technol. Aqua 2017, 66, 319–326. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, L.; Dou, H.; Lu, C.; Luan, X. Water hammer analysis when switching of parallel pumps based on contra-motion check valve. Ann. Nucl. Energy 2020, 139, 107275. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, K.B.; Lee, C.G. An experimental study on the control of pressure transients using an orifice. Int. J. Press. Vessel. Pip. 2001, 78, 337–341. [Google Scholar] [CrossRef]
- Han, Y.; Shi, W.; Xu, H.; Wang, J.; Zhou, L. Effects of Closing Times and Laws on Water Hammer in a Ball Valve Pipeline. Water 2022, 14, 1497. [Google Scholar] [CrossRef]
- Wang, C.; Quan, L.; Ou, H. The method of restraining hydraulic impact with active adjusting variable damping. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 3785–3794. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, W.; Ji, W.; Wang, B. Hoop layouts optimization for vibration reduction of L-shaped pipeline based on substructure-analytical model and genetic algorithm. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 243. [Google Scholar] [CrossRef]
- Silva, P.A.S.F.; Shabab, A.A.S.A.; Tsoutsanis, P.; Skote, M. Study of Orifice Design on Oleo-Pneumatic Shock Absorber. Fluids 2024, 9, 108. [Google Scholar] [CrossRef]
- Zeng, G.; Chen, W.; Li, J.; Wu, P.; Huang, B.; Wu, D. Numerical study on transient hydraulic excitation force characteristics of a water jet mixed-flow pump during rapid startup period. J. Mech. Sci. Technol. 2023, 37, 5117–5132. [Google Scholar] [CrossRef]
- Li, H.F.; Qi, T.; Zhao, Y. Common fault analysis and maintenance suggestion of canopy system for a certain type of aircraft. Aviat. Maint. Eng. 2023, 110–112. [Google Scholar] [CrossRef]
- Borges Da Silva, A.; Bastos De Freitas Rachid, F. Modeling of release and absorption of gas in liquid–gas flows within a consistent thermodynamic framework. Int. J. Eng. Sci. 2013, 66–67, 21–43. [Google Scholar] [CrossRef]
- Oskouei, S.J.P.; Zadeh, A.B.; Gates, I.D. A new kinetic model for non-equilibrium dissolved gas ex-solution from static heavy oil. Fuel 2017, 204, 12–22. [Google Scholar] [CrossRef]
- Chang, K.A.; Lindquist, W.B. The dynamics of gas-bubble formation at saturated conditions in porous media flow. Sci. Rep. 2020, 10, 13175. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, C.; Zhang, H.; Zhang, T.; Meng, D. Study on the Dissolution Mechanism of Aviation Hydraulic Oil–Nitrogen Gas Based on Molecular Dynamics. Processes 2025, 13, 1564. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Items | Value | |
|---|---|---|
| Experiment | Simulation | |
| Return time of piston | 4.8 s | 4.58 s |
| Peak pressure of lower hydraulic chamber | 5.6 MPa | 5.79 MPa |
| Stable pressure of lower hydraulic chamber | 0.11 MPa | 0.11 MPa |
| Pipeline Length (m) | Peak Pressure of Lower Hydraulic Chamber (MPa) | Peak Pressure of Pressure Tank’s Oil Chamber (MPa) | Whether Oil Overflows |
|---|---|---|---|
| 2.483 | 5.756 | 1.566 | No |
| 2.983 | 5.772 | 1.808 | No |
| 3.483 | 5.791 | 1.960 | Yes |
| 3.983 | 5.802 | 1.960 | Yes |
| 4.483 | 5.808 | 1.960 | Yes |
| Diameter (mm) | Pressure Peak of Lower Hydraulic Chamber (MPa) | Pressure Peak of Pressure Tank’s Oil Chamber (MPa) | Reduction Rate of Peak Pressure in Oil Tank | Whether Oil Overflows |
|---|---|---|---|---|
| 1.48 | 5.793 | 1.922 | 1.94% | No |
| 1.46 | 5.810 | 1.870 | 4.59% | No |
| 1.44 | 5.827 | 1.801 | 8.11% | No |
| 1.42 | 5.844 | 1.730 | 11.73% | No |
| 1.40 | 5.860 | 1.652 | 15.71% | No |
| Pipe Diameter (mm) | Pressure Peak of Lower Hydraulic Chamber (MPa) | Pressure Peak of Pressure Tank’s Oil Chamber (MPa) | Reduction Rate of Peak Pressure in Oil Tank | Whether Oil Overflows |
|---|---|---|---|---|
| 3 | 5.830 | 1.96 | 0 | Yes |
| 4 | 5.791 | 1.96 | 0 | Yes |
| 5 | 5.759 | 0.57 | 70.92% | No |
| 6 | 5.833 | 0.165 | 91.58% | No |
| 7 | 5.883 | 0.165 | 91.58% | No |
| Pipe Diameter (mm) | Pressure Peak of Lower Hydraulic Chamber (MPa) | Pressure Peak of Pressure Tank’s Oil Chamber (MPa) | Reduction Rate of Peak Pressure in Oil Tank | Whether Oil Overflows |
|---|---|---|---|---|
| 3.5 | 5.859 | 1.651 | 15.77% | No |
| 4 | 5.820 | 1.820 | 7.14% | No |
| 4.5 | 5.805 | 1.911 | 2.5% | No |
| 5 | 5.798 | 1.960 | 0 | Yes |
| 5.5 | 5.794 | 1.960 | 0 | Yes |
| Optimization Schemes | Extension Time of Actuator (s) | Pressure Peak of Lower Hydraulic Chamber (MPa) | Pressure Peak of Pressure Tank’s Oil Chamber (MPa) | Reduction Rate of Peak Pressure in Oil Tank |
|---|---|---|---|---|
| Reversible valve | 10.22 | 5.860 | 1.652 | 15.71% |
| Pipeline connected to upper hydraulic chamber | 9.31 | 5.833 | 0.165 | 91.58% |
| Pipeline connected to lower hydraulic chamber | 11.60 | 5.859 | 1.651 | 15.77% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Quan, L.; Han, L.; Fu, C.; Guo, C. Mechanism Analysis and Optimal Design of Return Impact of a Certain Aircraft Canopy Actuator. Actuators 2025, 14, 306. https://doi.org/10.3390/act14070306
Gao J, Quan L, Han L, Fu C, Guo C. Mechanism Analysis and Optimal Design of Return Impact of a Certain Aircraft Canopy Actuator. Actuators. 2025; 14(7):306. https://doi.org/10.3390/act14070306
Chicago/Turabian StyleGao, Jing, Lingxiao Quan, Linshan Han, Chen Fu, and Changhong Guo. 2025. "Mechanism Analysis and Optimal Design of Return Impact of a Certain Aircraft Canopy Actuator" Actuators 14, no. 7: 306. https://doi.org/10.3390/act14070306
APA StyleGao, J., Quan, L., Han, L., Fu, C., & Guo, C. (2025). Mechanism Analysis and Optimal Design of Return Impact of a Certain Aircraft Canopy Actuator. Actuators, 14(7), 306. https://doi.org/10.3390/act14070306