1. Introduction
Compared with the traditional hydraulic system, the emulsion hydraulic system has been used in large-scale engineering applications in key equipment such as hydraulic support for comprehensive mining and emulsion pumping stations because of its outstanding features such as low cost, non-flammability, and excellent environmental protection performance [
1,
2]. Currently, the emulsion pumping station mainly adopts a high water-based unloading valve or a relief valve as its pressure control and overload protection components. Among these, the high water-based unloading valve performs real-time sensing of system pressure changes and accurately controls the main spool opening and closing state. It can unload the pump station under the low-flow condition of the system, achieving energy-saving effects [
3,
4,
5]. The high water-based relief valve provides overload protection for the system by establishing a stable pressure–flow equilibrium relationship and strictly restricting the outlet pressure of the pumping station within the safety threshold. It is noteworthy that, although traditional mechanical valves play an important role in engineering applications, research on digital pressure valves for emulsion media is still in the early exploratory stage [
6,
7], and it is difficult for most of the existing digital valves to meet the demands of high pressure and high flow rate of emulsion pumping stations, as well as the high temperature, high humidity, dust, and combustible gases of the underground working environment in coal mines [
8,
9,
10,
11]. Therefore, the development of high-pressure and high-flow digital pressure control valves suitable for the harsh underground environment has become a technical bottleneck that needs to be overcome to realize intelligent mining.
In coal mining scenarios, high water-based unloading valves need to withstand the impact of high pressure and large flow rates, and at the same time, they also need to have the ability to provide fast response and precise control. Therefore, the static characteristics of the unloading valve, as well as the dynamic characteristics, such as response time, pressure fluctuation, and flow overshoot, have become the focus of research by scholars at home and abroad. In recent years, a number of innovative solutions have emerged. Wei Wenshu et al. [
12] proposed adopting intrinsically safe electromagnetic unloading valves to replace traditional unloading valves. By precisely regulating the opening and closing sequence of the pilot electromagnet, intelligent unloading control of the emulsion pump can be achieved. Some scholars [
13,
14] achieve precise regulation of the unloading process through proportional control technology and reduce the influence of unloading shock by controlling the opening curve of the valve core and the unloading time. Guo Kaiyu et al. [
15] proposed a digital control scheme for the unloading valve. By stepwise adjusting the opening speed of the pilot valve, the pressure instability of the liquid supply system can be effectively reduced. However, these improvements have not been able to overcome the inherent defects in the working principle of the unloading valve: In the typical working conditions of hydraulic support group coordinated action (such as moving frame–pushing cycle), the unloading valve can be opened and closed more than 2000 times in a single day. This high-frequency opening and closing switching will stimulate pressure pulsation in the pipeline, inducing resonance fatigue in the hydraulic pipeline, and significantly shortening the service life of the seals and pump body.
The performance of the relief valve plays a key role in ensuring the stability of the outlet pressure of the emulsion pumping station and the quality of the system’s liquid supply, and many scholars have made important contributions to the study of the pilot-operated relief valves for emulsion media. Some scholars [
16,
17,
18,
19,
20,
21,
22,
23] analyzed and optimized the structure of the relief valve through the analysis of dynamic characteristics or internal flow field characteristics to obtain good working performance. Zhang et al. [
24] proposed an ultra-high-pressure proportional cartridge valve based on the principle of displacement tracking and verified the feasibility of the displacement tracking principle and the advantages of cartridge valves applied under high flow conditions. Bossard et al. [
25] analyzed the structure and dynamic performance of the relief valve by using the General Fluid System Simulation Program (GFSSP). This program can adapt well to the hydrodynamic and kinematic characteristics of the valve during operation. Some scholars have analyzed the dynamic characteristics of pilot-operated relief valves by theoretical methods and simulation [
26]. Some scholars have also used simulation methods such as Matlab/Simulink to analyze the effects of structural parameters on the dynamic performance of relief valves by linearizing the dynamic equations to obtain a transfer function model [
27,
28,
29]. Of particular concern is that there are three major limitations in the existing studies: First, there is a near-total gap in the electric–magnetic–machine–liquid multidomain joint simulation study of digital relief valves; second, the current literature is mostly based on hydraulic oil or pure water as the medium, and there are few studies on relief valves for emulsion media; third, the static pressure setting mode of traditional relief valves leads to problems in the hydraulic bracket group pressure preservation stage, as well as under low-flow and variable-load conditions. The pumping station runs in a redundant loading state for a large amount of time, with a large amount of wasted electric energy.
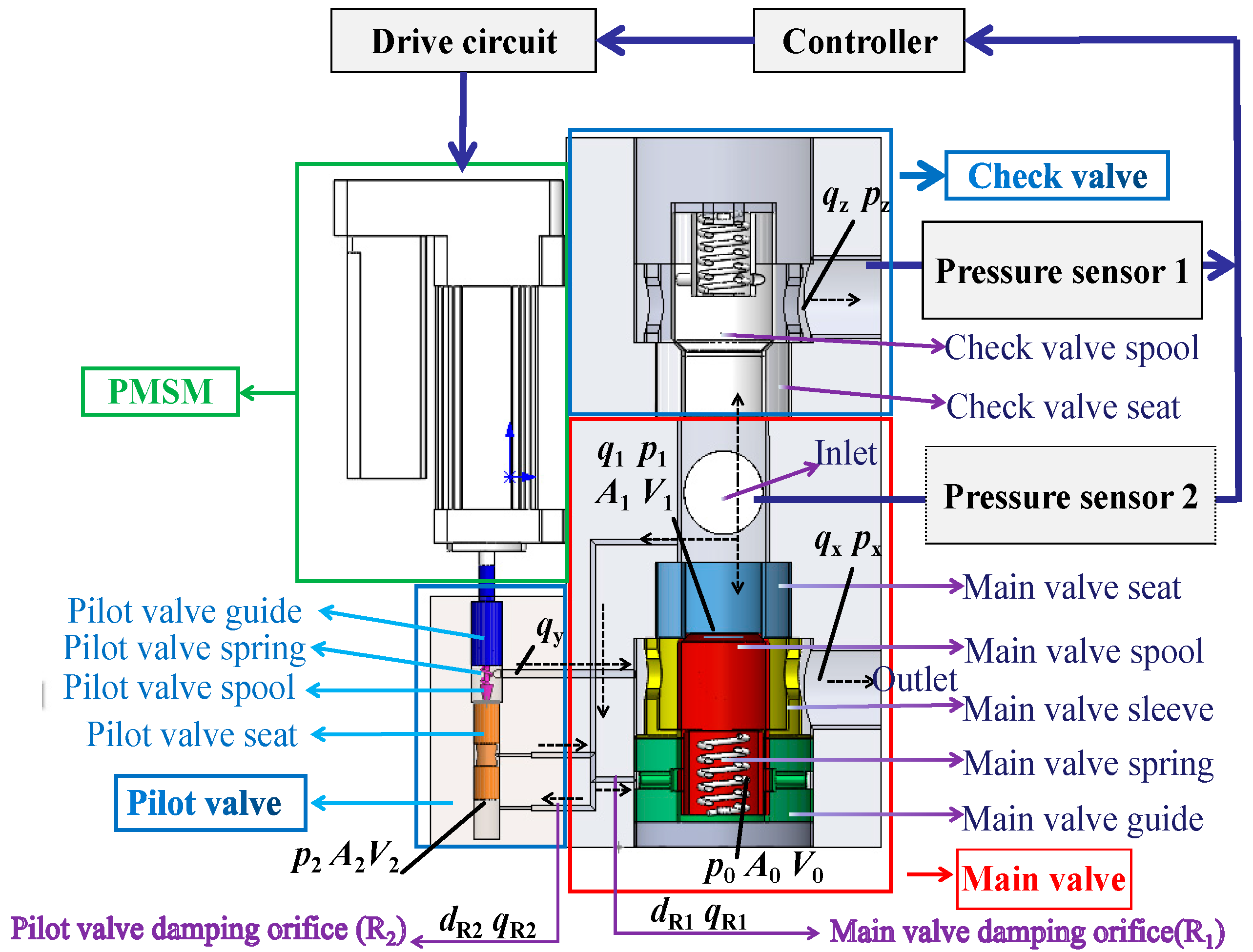
Aiming at the two core contradictions that the frequent opening and closing of the unloading valve during the frequent operation of the hydraulic bracket leads to pressure pulsation in the supply system, and that the static pressure regulation system of the relief valve makes the emulsion pumping station stay in the loading state for a long time and leads to the waste of energy, this paper puts forward a new scheme of multi-mode control according to the actual working conditions of the hydraulic bracket system. The core breakthrough of this scheme lies in the fact that, based on the high-precision position control method of the permanent magnet synchronous motor (PMSM), the spring pre-compression force of the pilot valve is dynamically adjusted through the threaded drive mechanism to achieve real-time closed-loop control of the outlet pressure of the pumping station. Accordingly, an engineering prototype of a high-pressure, high-flow digital pressure control valve for emulsion media was developed. A combination of simulation and experimental methods was used to study the control method, the dynamic characteristics of the digital pressure control valve, and the valve structure optimization. The objectives of this paper are to build a digital pressure control core element that meets the demand for intelligent development of mines and to reduce the unloading pressure pulsation under high-frequency action conditions and variable-load conditions of the hydraulic support group through a multi-mode cooperative control strategy; to realize the pressure supply of the pumping station according to the demand; and to reduce ineffective energy consumption.
3. Experimental Verification
Based on the Simulink/AMESim co-simulation model established in the previous section, this paper compares the simulation results and experimental data under the overflow working condition. The experiment system and data used as the comparison benchmark are derived from previous studies [
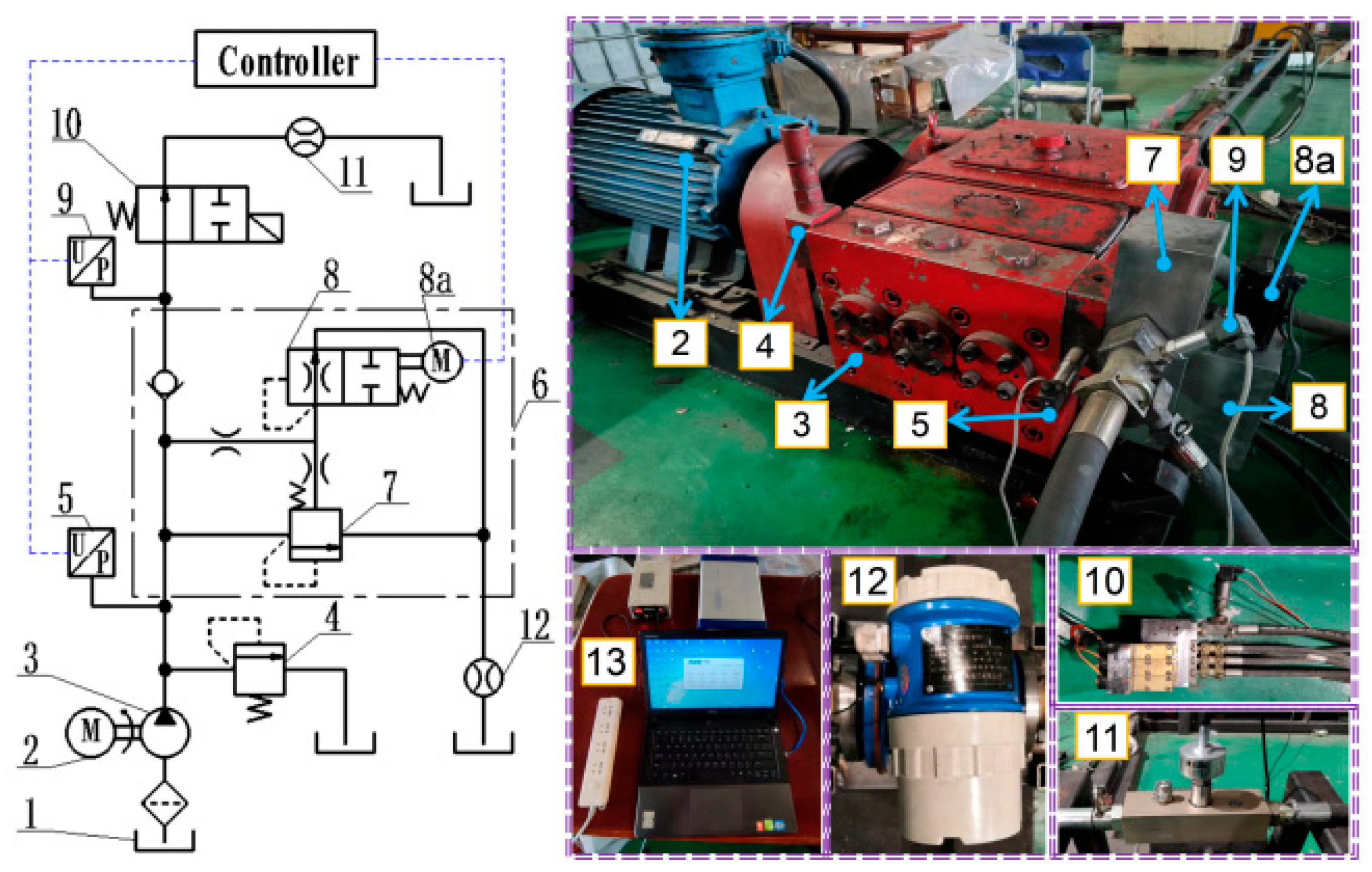
30]. This citation aims to verify the accuracy of this simulation model and lay the foundation for the subsequent proposed control methods and structural parameter optimization research. The experiment equipment and principle are shown in
Figure 5.
Before the operation test, the directional valve (10) is powered off in the left position, and the emulsion pump (3) is started. When the emulsion pump operates stably, the spring pre-compression of the pilot valve (8) is adjusted to 0 mm. Then, the reversing valve (10) is energized, and the emulsion flows back to the emulsion tank through the pressure control valve (6), putting the pumping station in the unloading state.
At the beginning of the test, the controller sends a pulse signal to the drive motor (8a) to change the adjusted pressure of the pilot valve (8) through the angle of the drive motor and collects the main valve inlet pressure through the pressure sensor (5). In order to test the pressure response characteristics of the main valve inlet under different input signals, step and slope signals were output to the digital pressure control valve.
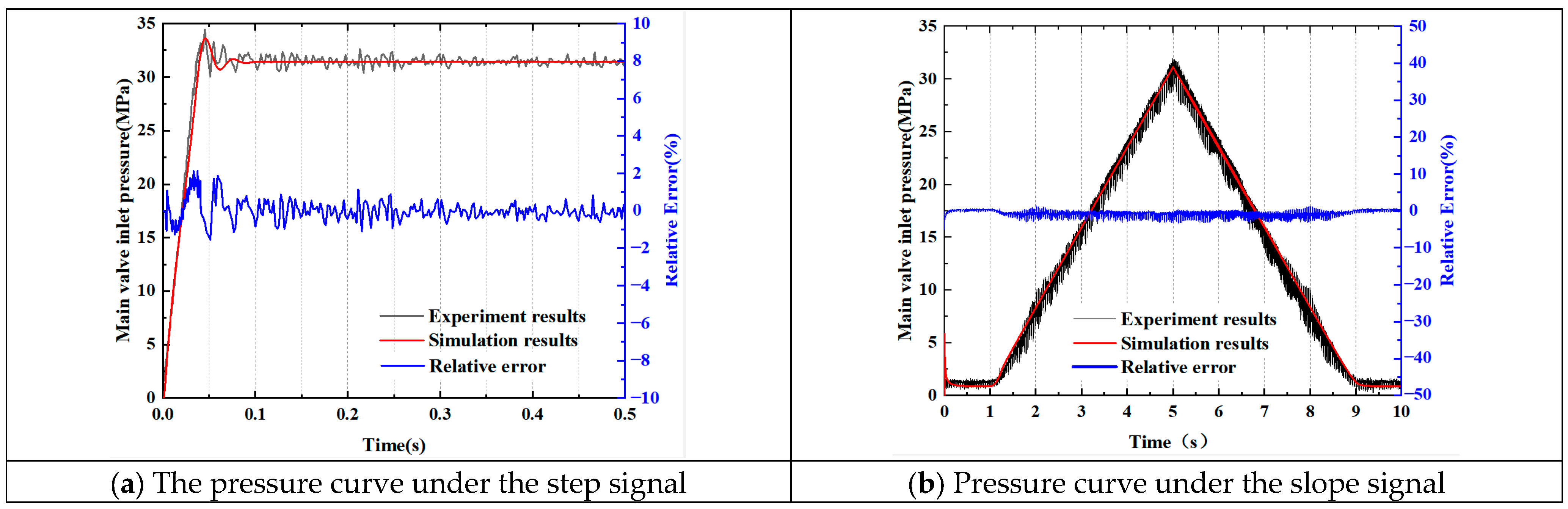
Figure 6a,b, respectively, shows the test and simulation results for those signals.
Figure 6a compares the pressure values obtained from the test and simulation of the digital pressure control valve under the step signal. Because the delay characteristics of the motor were ignored in the simulation process, the response speed obtained from the experiment was slower than the result obtained from the simulation. The test result values fluctuated around the steady-state pressure. This is because there was flow pulsation in the plunger pump during the test, but the influence of the flow pulsation of the hydraulic pump was not considered in the simulation process. It can be seen from
Figure 6a that the relative error between the simulation data and the test results is within ±2.6%.
Figure 6b compares the pressure values obtained from the test and simulation of the digital pressure control valve at the ramp signal. The relative error between the simulated data and the test results is within ±4.7%. The test results show good consistency with the simulation results, verifying the validity of the simulation model.
4. Results and Discussion
4.1. Simulation Study of PMSM
4.1.1. Comparative Simulation Study of Different Control Strategies
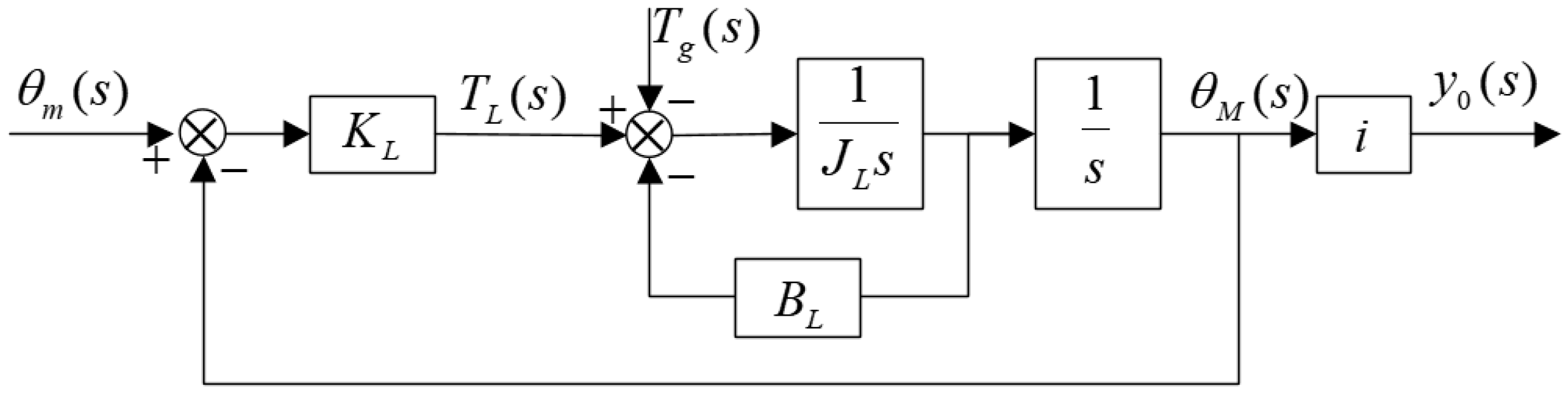
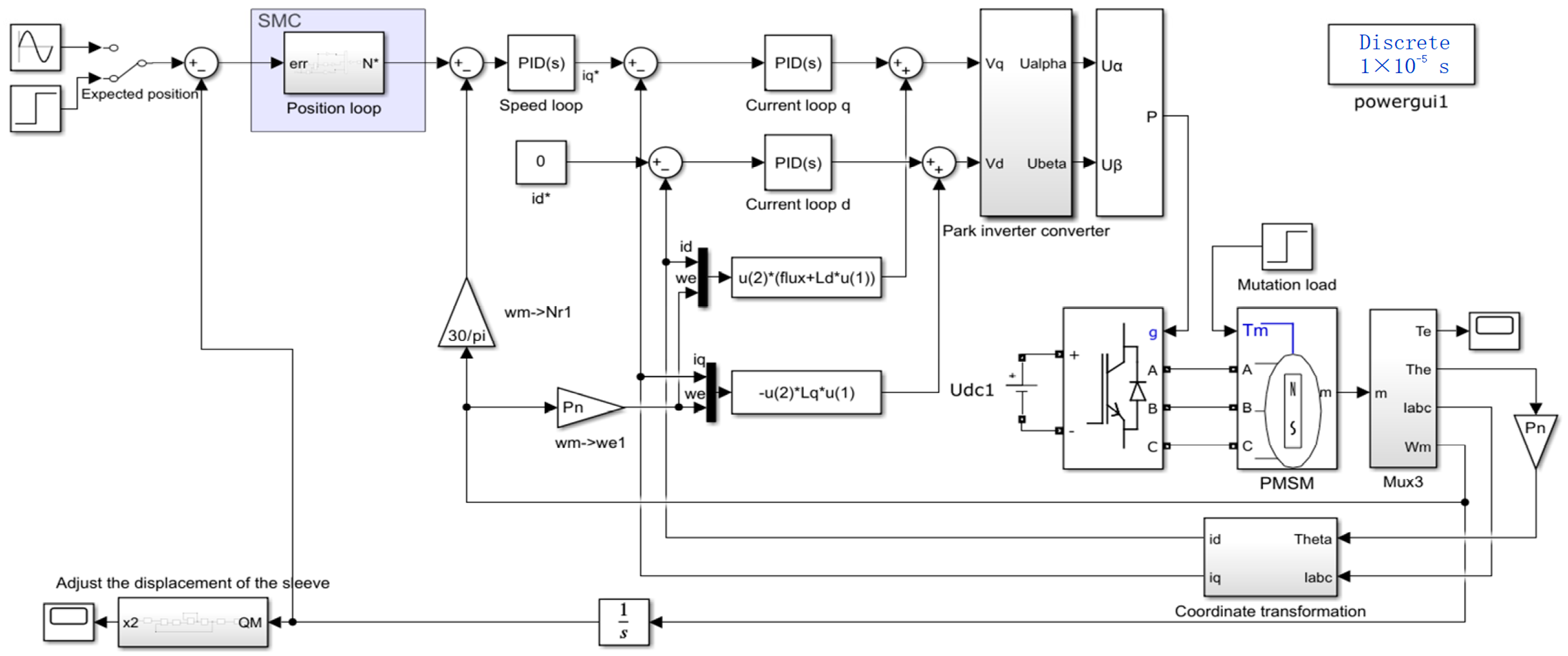
Since the rotor of the drive motor rotates the lead screw nut, the rotation angle is converted into the axial displacement of the pilot push rod by adjusting the sleeve, thereby controlling the opening pressure of the pilot valve. Therefore, the angular position response characteristics of the drive motor directly determine the quality of the dynamic response characteristics of the digital pressure control valve. In order to verify the effectiveness of the proposed new convergence rate sliding mode control strategy, respectively, simulation studies were conducted on the position response and position tracking performance of the PI controller and the new approach-rate sliding mode controller for the position control system of the drive motor. The simulation results of the waveform are shown in
Figure 7.
As shown in
Figure 7, the angle step signal is input to the drive motor at the moment of 0 s, and the motor is started under the no-load condition. By comparing the control performance of the position control system of the drive motor with the PI controller and the sliding film controller, it can be seen that the response time of the drive motor under the PI controller is approximately 0.045 s. Under the new approach-rate sliding mode controller, the response time is approximately 0.013 s. The motor responds faster. The response time to reach the target position is shortened by approximately 71%, and the steady-state error can basically be ignored after reaching the target position.
Further testing of the position tracking performance of the digital pressure control valve drive system was conducted with an input amplitude of 1 rad sinusoidal signal.
Figure 7b shows that the phase lag between the new convergence rate sliding mode controller and the input signal curve is only 0.025 rad, and, compared with the tracking accuracy of the PI position control, the position control system of the new convergence rate sliding mode controller is also greatly improved in tracking accuracy.
In summary, compared with the PI position control, the drive motor based on the new convergence rate sliding mode control method has a faster response speed and reaches the target position in a shorter time. This verifies that the new convergence rate sliding mode control proposed in this paper can improve the dynamic and static performance of the digital pressure control valve drive system.
4.1.2. Simulation Study of Dynamic Characteristics
Aiming at the proposed new convergence rate sliding mode control method for the position control system of the drive motor, a further simulation study was carried out on the digital pressure control valve drive system. In order to simulate the application working condition of the drive motor under variable load during the starting process with load, a sudden change of load was applied to the drive motor during the simulation process to study the response characteristics of the motor under variable load conditions.
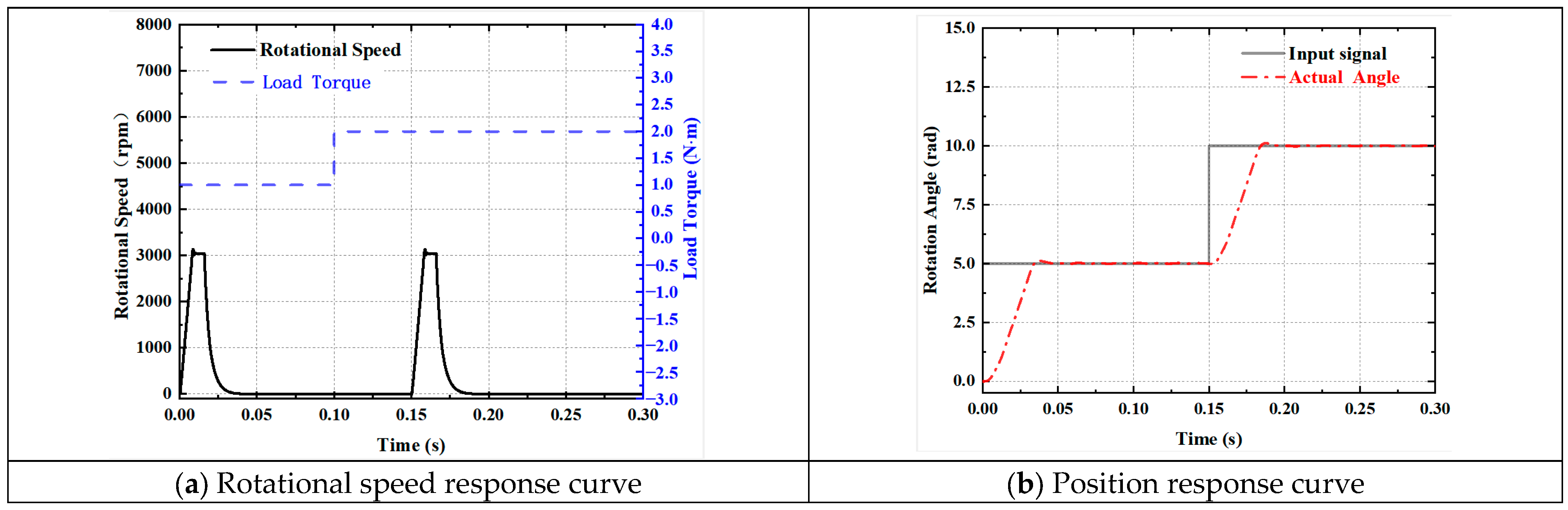
(1) Speed Response Characteristics under Variable Load Conditions
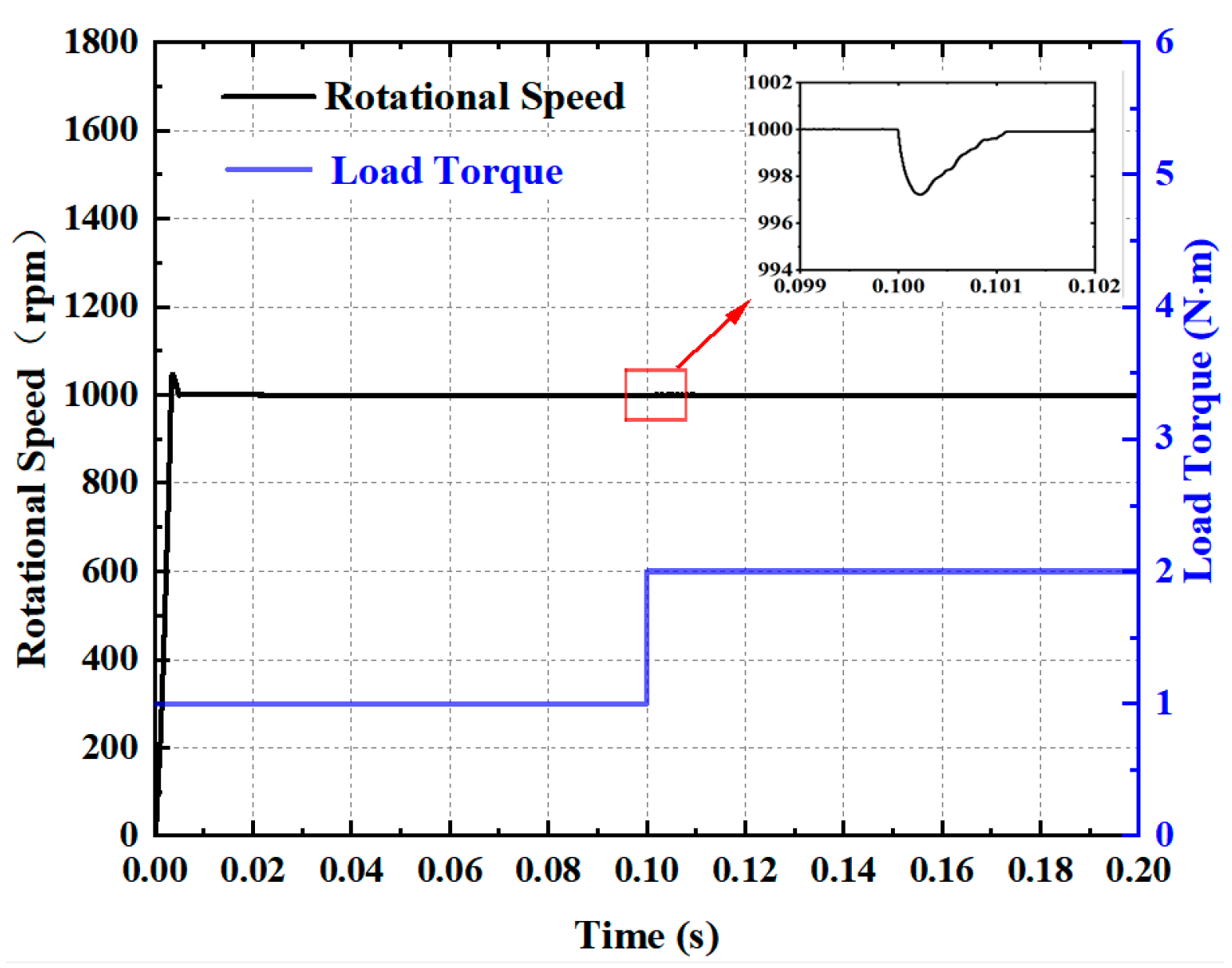
To study the effect of load change on rotational speed alone, the output of the position loop controller is not considered to change, and the input speed command of the speed loop is given as 1000 rpm. The load torque of the motor is set to be 1 N·m for the time period of 0~0.1 s and 2 N·m for the time period of 0.1~0.2 s to simulate the load change of the motor during loaded startup and operation, respectively.
As shown in
Figure 8, the drive motor quickly tracks the reference speed during acceleration and sudden load change. In the 0~0.1 s start-up phase with load, the motor speed stabilizes at 1000 rpm after 0.005 s, instantly reaching the steady-state speed, and the speed response overshoot is less than 6%. At the moment of 0.1 s, there is a transient fluctuation of small amplitude in the motor speed due to the load mutation, and it recovers to the reference speed after about 0.0013 s, with the maximum fluctuation amplitude being only 3 rpm. At the moment of 0.1 s, the motor speed fluctuates briefly due to the sudden change of load and returns to the reference speed after about 0.0013 s. The maximum fluctuation amplitude is only 3 rpm, which indicates that the motor speed has strong robustness when it is disturbed by the external load.
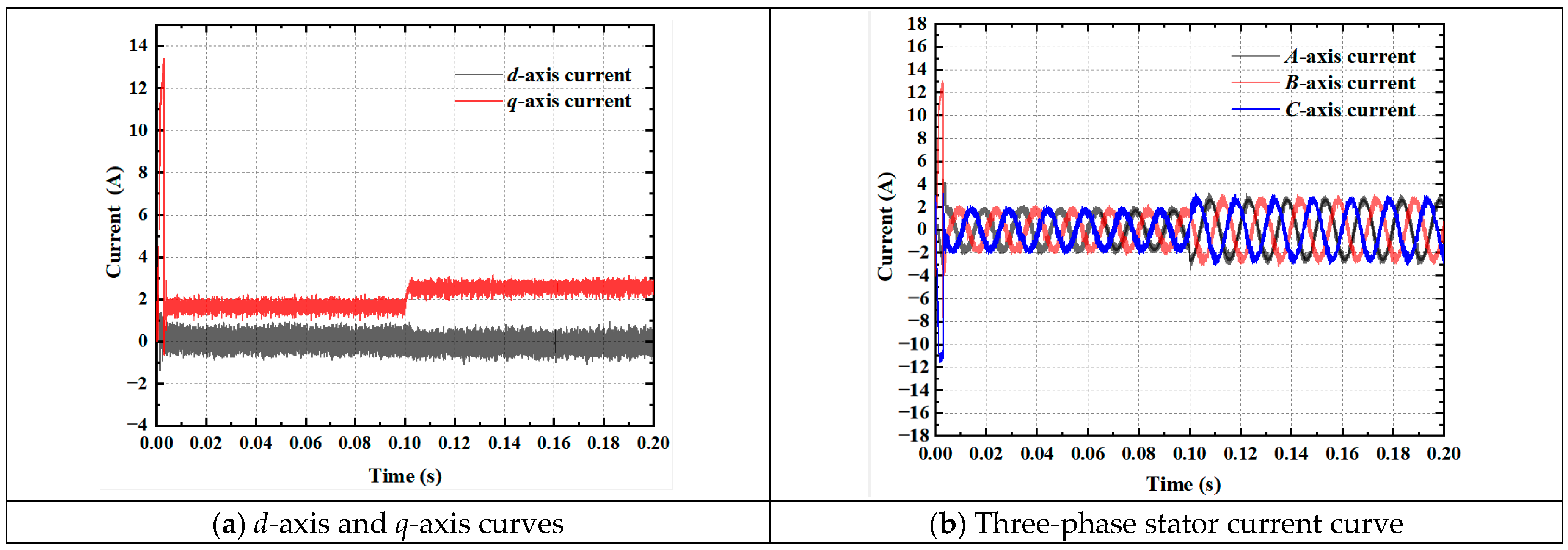
As shown in
Figure 9a, the
q-axis current increases instantaneously during acceleration of the drive motor, and since the electromagnetic torque is positively correlated with the value of
iq, the larger instantaneous electromagnetic torque overcomes the load so that the motor speed can reach the target speed quickly. At the stage when the motor speed is stabilized at 1000 rpm, the
q-axis current increases from 1.7 A to 2.5 A to overcome the load change due to the sudden change in load torque at 0.1 s. The
q-axis and
d-axis currents remain stable throughout the process, indicating excellent decoupling performance. From
Figure 9b, it can be seen that the stator three-phase currents are sinusoidal throughout the variable load operation, which indicates that the parameters of the current loop and speed loop PI controllers are reasonable after parameter adjustment.
(2) Position Response Characteristics Under Variable Load Conditions
Considering the actual working conditions of the drive motor, the motor load torque is set to be 1 N·m in the time period from 0 to 0.1 s to simulate the start-up process of the drive motor under load. A sudden change in load torque of 2 N·m is applied at the time of 0.1 s to simulate the external load change process of the drive motor during loaded operation. The displacement response characteristics of the drive motor during start-up and operation under load are investigated by the sudden change in external load.
As shown in
Figure 10, the motor speed is almost unaffected by the load change when the load torque is suddenly increased at 0.1 s. Meanwhile, in terms of position control performance, the motor completes positioning in the shortest time, and the time for the motor rotor to stabilize the position response curve to the target position does not change under different load conditions, which is highly robust.
4.2. Simulation of Unloading–Loading Characteristics of the Digital Pressure Control Valve
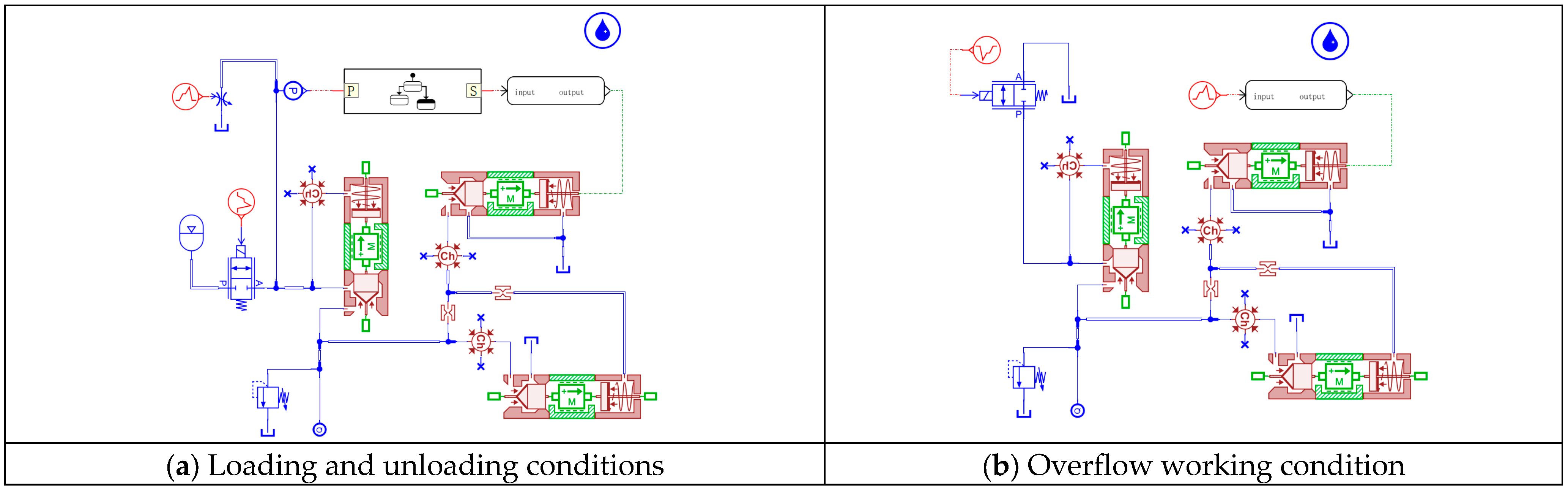
In order to study the working performance of the digital pressure control valve under the unloading and loading conditions of the pumping station (the pressure control valve functions as the unloading valve), the response characteristics of the main valve inlet and the system pressure are studied. According to the simulation model constructed in
Figure 4a, the external throttle valve simulates the continuous small amount of liquid used in the liquid supply system in order to achieve the simulation of the continuous dynamic working process of the liquid supply system. The simulation results of the dynamic characteristics of the opening and closing process of the digital pressure regulator valve are shown in
Figure 11.
Figure 11 shows the digital pressure regulator valve unloading–loading process inlet pressure and system pressure diagram. In the beginning stage, the main valve is in the closed state, the emulsion pumping station is in the loading state, and the system pressure rises rapidly. When the system pressure rises to the accumulator filling pressure, due to the influence of the accumulator, the hydraulic system pressure rises more slowly. When the system pressure reaches the unloading pressure, the digital pressure regulating valve opens, and the emulsion pumping station is unloaded. During the unloading stage, the value of the emulsion pump outlet pressure (the main valve inlet pressure) stays stable at 0.485 MPa, which effectively avoids unnecessary energy consumption and optimizes the energy utilization efficiency. Due to continuous leakage through the throttle valve during the unloading stage, the hydraulic system pressure drops to the loading pressure limit, the pressure regulating valve closes, the pump station re-enters the loading state, and the cycle repeats. The instant pressure impact of the entire process of the digital pressure regulator valve response speed, opening, and closing is small.
4.3. Simulation of Operating Characteristics of the Digital Pressure Control Valve in Overflow Condition
In order to study the operating performance of the digital pressure control valve in the relief condition (the pressure control valve performs the function of a relief valve), the pressure response characteristics of the main valve inlet will be investigated below.
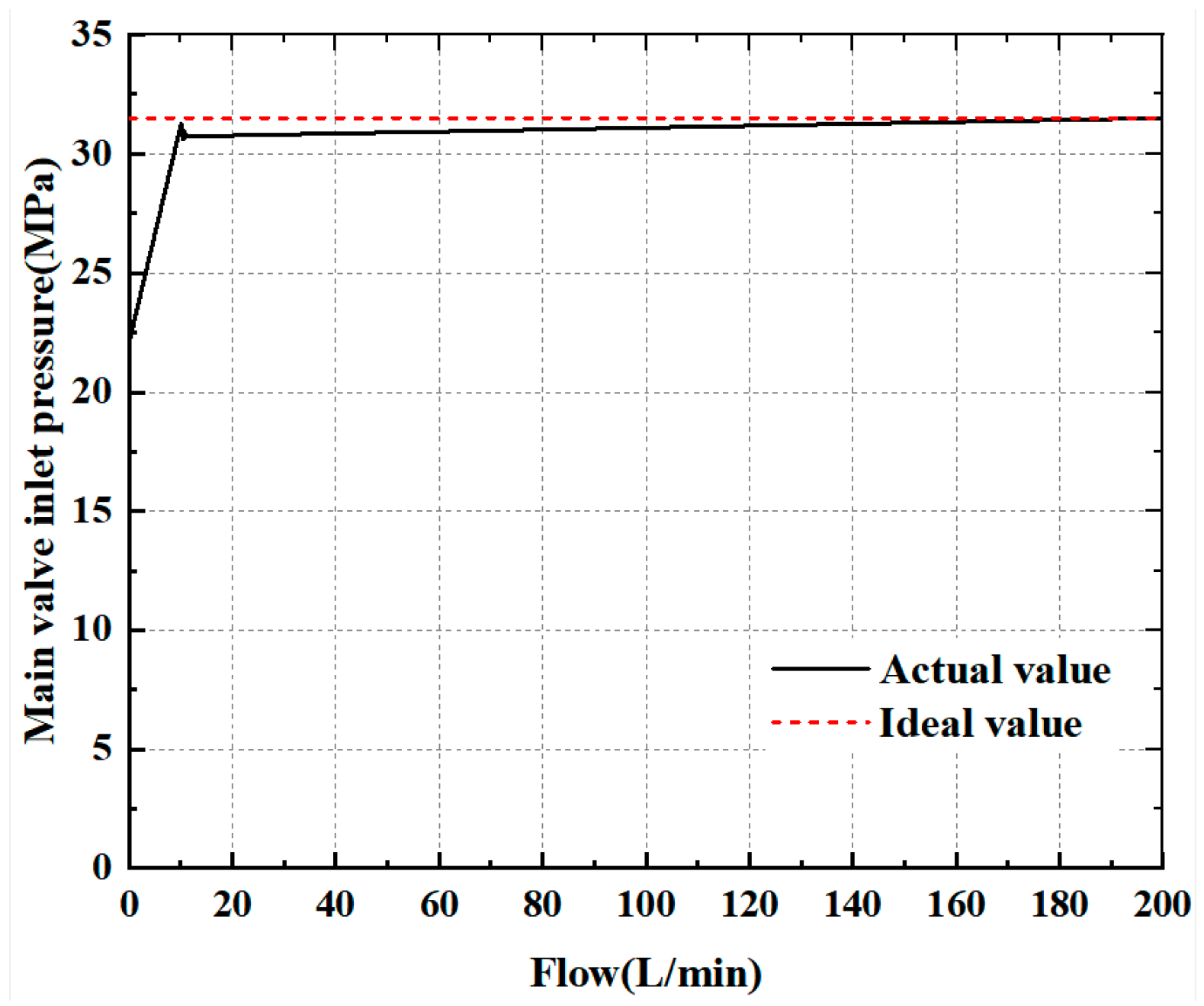
Figure 12 shows the static characteristics of the main valve inlet of the digital pressure control valve. According to the simulation model built in
Figure 4b, the directional valve is set to the right position in advance, the output flow rate of the pump station is 0~200 L/min, and the simulation time is 10 s. The simulation results under the condition of an unchanged spring adjustment preload of the pilot valve are processed, and the obtained static characteristic curve is shown in
Figure 12.
As can be seen from the simulation results, when the inlet pressure reaches 22.41 MPa, the pilot valve opens, the digital pressure control valve begins to produce overflow, and the pressure, with the increase in overflow flow rate, rapidly rises to 30.69 MPa. There is a slight fluctuation, and the pressure curve tends to flatten out. When the overflow flow reaches 200 L/min, the main valve port pressure is 31.51 MPa, which basically coincides with the ideal rated pressure value, indicating that the rated operating pressure meets the design requirements.
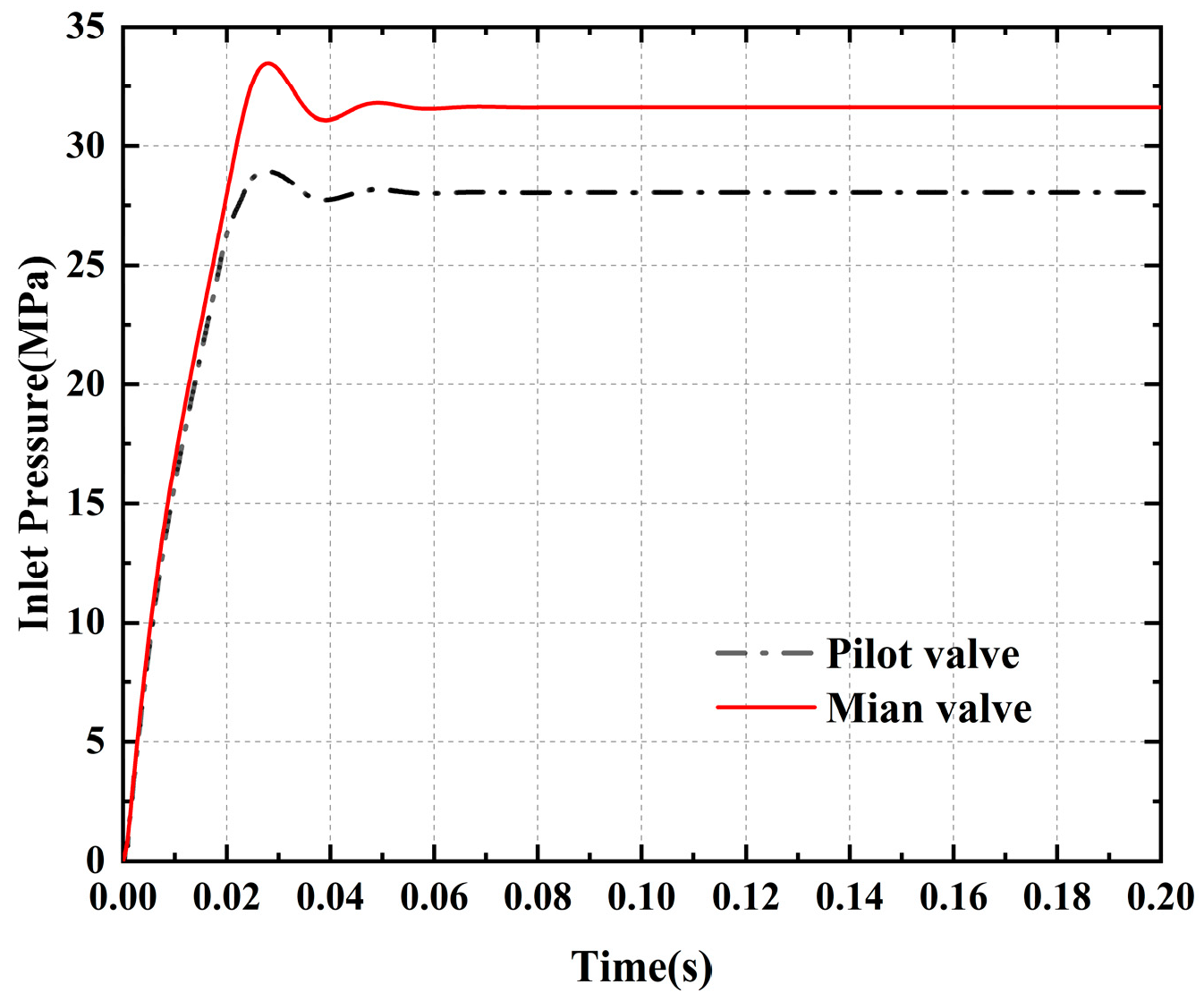
The static characteristics of the main valve inlet of the pressure control valve are investigated. According to the simulation model built in
Figure 4b, the directional valve is set to the right position in advance, the output flow rate of the pump station is 200 L/min, the simulation results under the condition of an unchanged spring-adjusted preload of the pilot valve are processed, and the simulation obtains the dynamic response curve of the pressure inlet of the pilot part and the main valve part of the pressure control valve, as shown in
Figure 13.
From the simulation results, it can be seen that the main valve inlet pressure reaches a stable value at 76.2 ms, the stable value of the pressure is 31.51 MPa, the overshooting amount is 6.3%, and the response time is 28.4 ms. The pilot valve inlet pressure reaches a stable value at 61.1 ms, the stable value is 27.86 MPa, the overshooting amount is 3.2%, and the response time is 27.3 ms. The designed digital pressure control valve pilot spool and main spool opening time interval is short, the inlet pressure is stable, the overshooting amount is small, the stabilisation time is short, and it has good dynamic response characteristics.
6. Conclusions
Aiming at the pressure pulsation and energy waste of the existing unloading valves and relief valves in the underground working face, this paper puts forward a multi-mode control scheme according to the actual working conditions of the hydraulic bracket system, using a new convergence rate sliding film position control method to control PMSM to control the pilot valve in order to regulate the outlet pressure of the pump station in real time, and develops a new type of digital pressure control valve prototype for the emulsified liquid medium under high-pressure and large-flow conditions.
The drive scheme of the digital pressure control valve and the controller of the drive system were designed, and a Simulink simulation model was established. The pilot drive motor adopted a three-closed-loop control system, and the control of the position loop was optimized. Simulation studies were conducted respectively on the position response and position tracking performance of the drive motor position control system by the PI controller and the proposed new approach-rate sliding mode controller. The results show that the response time to reach the target position under the new approach-rate sliding mode controller is approximately 0.013 s, which is shortened by about 71% compared with the PI control. Moreover, it has excellent tracking performance, and the phase lag with the input signal curve is only 0.025 rad. Further simulation studies were conducted on the response characteristics of the drive motor during the start-up process with load and under variable load conditions. The results show that the proposed new approach-rate sliding mode control designed can improve the response characteristics of the drive system. The time for the motor speed to stabilize at 1000 rpm is 0.005 s, and the overshoot is less than 6%. At the moment of sudden load change, the motor speed can recover to the reference speed after 0.0013 s, and the maximum fluctuation amplitude is only 3 rpm, which indicates strong robustness.
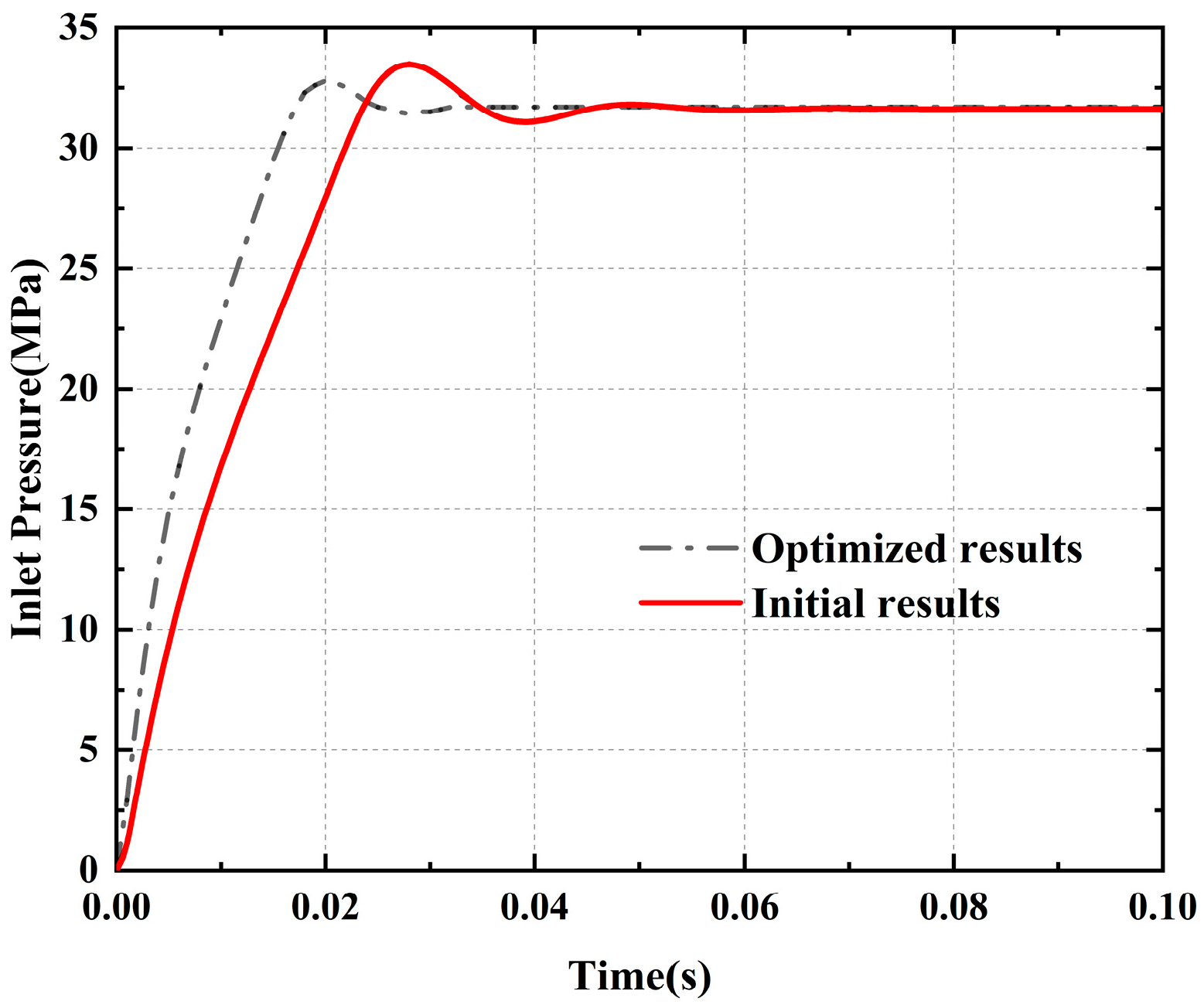
Based on the Simulink simulation model of the drive system controller, the AMESim/Simulink joint simulation model of the digital pressure control valve was established, and the correctness of the simulation model was verified through experimental analysis. The static characteristics, dynamic characteristics, and other aspects of the digital pressure control valve were analyzed through the joint simulation of AMESim/Simulink. The results show that the stabilization time of the inlet pressure of the main valve is 76.2 ms, the pressure stabilization value is 31.51 MPa, and the overshoot is 6.3%. The overall working performance of the designed digital pressure control valve is good. Moreover, the main structural parameters of the valve were optimized through the genetic algorithm. The pressure stabilization time was 44.8 ms, and the pressure overdraft was 4.1%. The optimized model has better performance than the one before optimization.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}