Abstract
Due to their high energy density and favorable load-to-weight ratio, shape-memory alloy (SMA) materials are ideal actuation sources for soft robots. However, the relatively long cooling time of SMA wires in soft bodies limits their response speed. In this study, we designed and fabricated a novel SMA artificial muscle. When active heat absorption was enabled through thermoelectric modules and the evaporation/dehydration effects of hydrogels, the cooling rate of the SMA wires increased significantly. Simulation and experimental results demonstrate that with the proposed heat-dissipation scheme, the cooling speed of the SMA wires improved notably, with a temperature drop of 9.6 °C within 4 s. Additionally, the designed agar/polyacrylamide hydrogel, which has a porous skeleton structure, achieved a water-absorption expansion rate that was 600% of the previous value. When a PVC elastic substrate was used, the bending angle of the SMA artificial muscle reached 71°, with minimal bending attenuation after 45 consecutive cyclic tests. A soft gripper composed of the novel SMA artificial muscles was capable of manipulating objects of various shapes. Overall, the combination of active and passive heat-dissipation strategies enabled the SMA artificial muscle to achieve excellent durability, rapid heat dissipation, and strong versatility, demonstrating its significant potential for various applications.
1. Introduction
Rigid robots have been widely used in industrial applications, including in automated production tasks such as assembly, welding, spraying, and cutting [1,2,3,4]. However, due to their limited environmental adaptability, high noise levels, and lack of biocompatibility, rigid robots are not suitable for fine grasping and manipulation in confined spaces. Soft robots, manufactured using stable and flexible materials, can achieve continuous deformation and theoretically infinite degrees of freedom [5,6,7]. This design allows soft robots to maintain a high level of integrity and stability even under extreme and complex conditions. Additionally, the excellent biocompatibility and flexibility of soft robots allow them to bypass the limitations of rigid robots. Consequently, researchers have studied various soft robots with different motion modes, including crawling robots [8], rolling robots [9,10], jumping robots [11,12], and underwater robots [13,14].
Biological organisms in nature exhibit characteristic movements and behaviors dependent on their structures. Researchers mimic these biological structures to design soft robots. Soft actuators are used to generate the driving force for soft robots, and these actuators are typically made from lightweight, flexible, and morphologically adaptable artificial muscles [15,16,17]. In recent years, various types of artificial muscles [18,19,20] have been developed for use in soft actuators, including pneumatic actuators [5,21,22], dielectric elastomers [6,23,24], ionic polymers [25], piezoelectric materials [26,27,28], and shape-memory alloys (SMAs) [29,30,31]. Among them, SMAs are considered the best material for artificial muscles due to their high energy density, good load-to-weight ratio, strong cyclic stability, and integrated actuation structure [32,33]. Designing artificial muscles based on SMA wires enables the miniaturization of actuators. SMAs can be used to create artificial muscles capable of various motion forms, including bending and twisting [34,35], making them suitable for applications such as dexterous manipulation and adaptive grasping. These actuators are typically made from SMA wires, SMA springs, or SMA ribbon structures.
Some researchers have developed soft actuators with compact structures, special functions, and excellent performance. For example, Baek et al. designed a bidirectional rotary actuator composed of shape-memory alloy wires, a rotating shaft, and two support elements [36]. Similarly, Yuan et al. designed a rotary actuator driven by SMA wires, which were embedded inside a 3D-printed helical structure, enabling clockwise and counterclockwise rotations of up to ±200 degrees [37]. Yang et al. designed a soft robotic arm uniformly embedded with three sets of SMA springs, mimicking the longitudinal muscles of an arm [38], and achieved precise bending-deformation control through linear Hall sensors and PID control. However, the dual-phase transformation (between martensite and austenite) of SMAs delays heating and cooling processes, especially prolonging cooling times [39]. To improve the cooling rate of SMA wires, researchers have developed devices such as heat sinks [40], water channels, and thermal pumps. Choi et al. proposed a forced-air cooling method for SMA with a frequency of 0.18 Hz [41]. Cheng et al. developed a water-based cooling strategy that increased the overall response frequency of the actuator to 0.143 Hz [42]. Nevertheless, additional cooling equipment increases system complexity and poses challenges for integration into small, flexible actuators. Kalairaj et al. created a gelatin-coated SMA bending actuator with a frequency of 0.2 Hz and a bending-angle range of 1 to 35 degrees [43]. Although some studies have reported the application of hydrogel or thermoelectric modules in SMA actuators, their cooling rates and bending performance are still limited.
In this paper, we propose a novel SMA artificial muscle integrated with hydrogels and thermoelectric materials (Figure 1a), the cooling of which is accelerated by an active-and-passive cooling strategy. The SMA wire operates through Joule heating, with its actuation speed depending on the heating and cooling rates (Figure 1b). On the one hand, the hydrogel serves as a static coolant capable of absorbing heat from the SMA wire through evaporation and dehydration (Figure 1c). On the other hand, the cold side of the thermoelectric material actively dissipates heat from the SMA (Figure 1d). Additionally, the hydrogel accelerates heat dissipation from the hot side of the thermoelectric material, aiding in the cooling effect on its cold side. Thermal characteristics of the SMA wire under different cooling schemes were investigated using COMSOL 6.2. Furthermore, a series of experiments was conducted to study the properties of SMA wires and agar/polyacrylamide hydrogels, compare different cooling schemes, and demonstrate the bending response of the SMA artificial muscle. Simulation and experimental results indicate that the cooling rate of the SMA wire is significantly improved by implementation of the proposed cooling scheme. A three-finger soft gripper constructed with this SMA artificial muscle can easily grasp various objects. In conclusion, the SMA artificial muscle designed with both active and passive cooling solutions exhibits excellent durability and rapid response characteristics that make it suitable for application in various scenarios (Figure 1e).
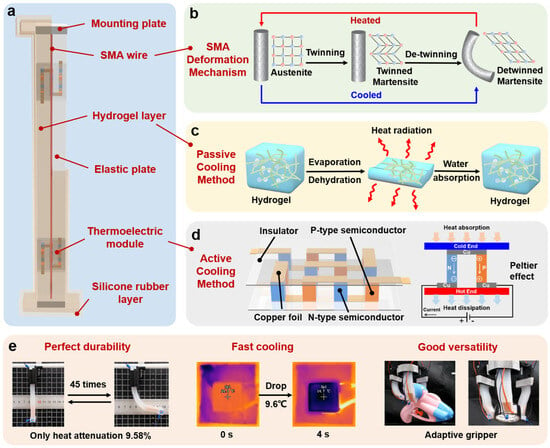
Figure 1.
Overview of the SMA artificial muscle. (a) 3D model diagram of the proposed SMA artificial muscle. (b) Phase transformation and bending changes of the SMA wire during the actuation process. (c) Passive heat-dissipation method for the SMA artificial muscle based on hydrogel evaporation and dehydration. (d) Active heat-dissipation method for the SMA artificial muscle based on the Peltier effect of thermoelectric modules. (e) The designed SMA artificial muscle, equipped with an advanced heat-dissipation scheme, exhibits excellent durability, rapid cooling, and good versatility.
2. Design and Fabrication of SMA-Based Artificial Muscles
2.1. Design Scheme
Figure 2a illustrates the design scheme of the proposed shape-memory alloy (SMA) artificial muscle, which had overall dimensions of 95 mm × 25 mm × 9 mm. The SMA artificial muscle consisted of three main components: a silicone rubber layer, a hydrogel layer, and an actuation module. The actuation module comprised two thermoelectric (TE) modules, two mounting plates, one elastic plate, and an SMA wire, which served as the actuating part of the SMA artificial muscle. The mounting plates were positioned on either side of the elastic plate and were firmly bonded using strong adhesive. The SMA wire was secured between the two mounting plates via cable connectors and remained under constant tension. The elastic plate generated a restoring force during the recovery of the SMA artificial muscle, accelerating its transition from the actuated state back to the initial state. The actuation module (Figure 2b) was encapsulated within the hydrogel layer. When it was exposed to air, the hydrogel dehydrated and shrank. Therefore, the hydrogel substrate was enclosed by the silicone-rubber layer to extend its operational lifespan.
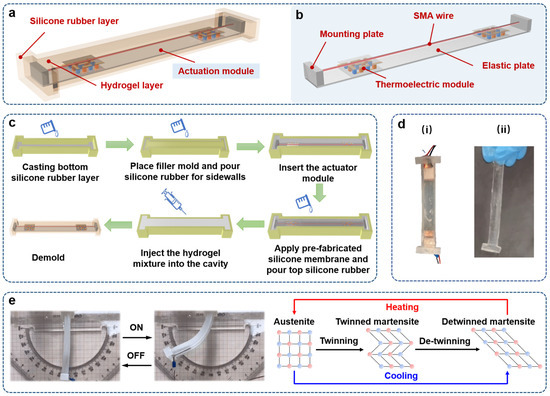
Figure 2.
Structure, fabrication, and working principle of the SMA artificial muscle. (a) 3D-model diagram of the SMA artificial muscle. (b) 3D-model diagram of the actuation module. (c) Schematic illustration of the fabrication of the SMA artificial muscle. (d) Images of the fabricated SMA artificial muscle and hydrogel. (e) Driving process of the SMA artificial muscle and phase-transformation images showing the SMA wire during actuation.
2.2. Fabrication
As shown in Figure 2c, the SMA artificial muscle was fabricated through a layered casting method, where the silicone rubber was prepared by mixing Ecoflex-0030A and Ecoflex-0030B (Smooth-On, Inc., Macungie, PA, USA) in a 1:1 ratio. The detailed process was as follows: (i) A small amount of petroleum jelly 2qs applied inside the mold to facilitate subsequent demolding. A specific quantity of the silicone rubber mixture was poured into the mold; after curing, it formed the bottom silicone rubber base. (ii) A filler mold was added, after which further casting of the silicone rubber sidewalls was carried out to create an internal cavity that would be later filled with the hydrogel layer. (iii) The filler mold was removed, and the pre-assembled actuation module, equipped with thermoelectric modules, was placed into the cavity enclosed by the silicone rubber walls. (iv) A prefabricated silicone rubber film was placed on top of the silicone rubber walls to prevent the silicone rubber mixture (added next) from seeping into the cavity. Subsequently, the top silicone rubber layer was cast using the silicone rubber mixture. (v) The hydrogel precursor solution was injected into the cavity using a syringe. The mold was then placed in a drying oven that was maintained at 50 °C for 2 h, enabling thermal initiation of the polymerization process to form the crosslinked hydrogel matrix. (vi) Demolding yielded the final fabricated SMA artificial muscle device shown in Figure 2d(i). Notably, significant bubble formation occurred during the mixing of Ecoflex-0030A and Ecoflex-0030B; thus, degassing treatment under vacuum is required after the silicone rubber mixture has been poured.
The agar/polyacrylamide double-network hydrogel was prepared using a one-pot method, as shown in Figure S1. First, 3.6 g of acrylamide monomer was dissolved in 20 mL of distilled water, and 0.5 g of agar was added to enhance the water-retention performance of the hydrogel. After 20 min of magnetic stirring, a stable mixed solution formed. Subsequently, 0.036 g of N,N′-methylenebisacrylamide was added to the solution. After mixing, the solution was poured into a mold and thermally initiated in a blast drying oven (50 °C) for 2 h. Completion of the reaction yielded the agar/polyacrylamide double-network hydrogel layer was obtained, as shown in Figure 2d(ii).
Two thermoelectric modules were symmetrically mounted on the elastic substrate. Mounting plates with pre-drilled holes were designed to hold the SMA wire, which was tensioned and fixed at both ends of the substrate to maximize actuation deformation. Figure S2 illustrates the fabrication of the thermoelectric modules and the control module. The columnar semiconductors in the thermoelectric modules were composed of bismuth telluride (Bi2Te3) particles, with P-type and N-type semiconductors alternately arranged and connected via copper foil. Insulating plates were then applied to the top and bottom surfaces of the connected semiconductors. The entire assembly was encapsulated to complete the fabrication of the thermoelectric modules.
2.3. Operational Princple
The SMA wire operates through Joule heating, with the actuation speed depending on the heating and cooling rates. In the artificial muscle, activation is achieved by applying an external DC power supply, where switching the current on and off controls actuation, as illustrated in Figure 2e. When the SMA artificial muscle is activated, the SMA wire contracts due to the phase transformation from martensite to austenite, causing the SMA artificial muscle to bend under the constraint of the fixation plates. Once the external power signal is turned off, the SMA wire can recover from plastic deformation through the transformation between the martensitic and austenitic crystal structures.
3. Simulation Analysis of Heat-Dissipation Scheme
3.1. Heat-Dissipation Scheme
Figure 3a illustrates the proposed heat-transfer scheme for the SMA artificial muscle. During cooling and recovery, the hydrogel passively absorbs heat, while the TE module actively dissipates heat. In this phase, the SMA wire does not require an external power source and acts as a heat source. Through the aforementioned heat-absorption strategies, the heat generated by the SMA wire is effectively dissipated.
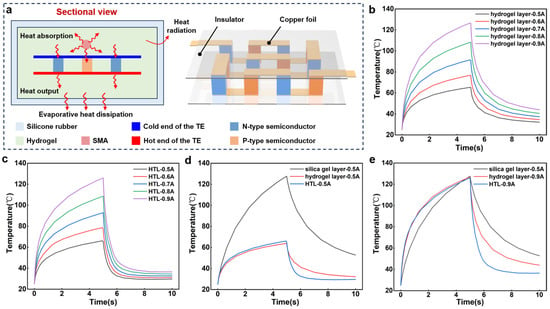
Figure 3.
Cooling methods and simulation analysis of the SMA artificial muscle. (a) Schematic diagram of heat transfer in the SMA artificial muscle from a side view, with a magnified local view of the thermoelectric module (TE module). Temperature variation in the SMA wire over time under different conditions: (b) influence of current amplitude on the temperature of the SMA wire under the hydrogel-layer condition; (c) influence of current amplitude on the temperature of the SMA wire under the HTL condition; (d) comparison of different heat-dissipation schemes at the current of 0.5 A; (e) comparison of different heat-dissipation schemes when the maximum temperatures are similar.
Hydrogels are three-dimensional polymeric networks capable of absorbing and retaining large quantities of water, with some having water content exceeding 90%. When applied to a heat source, hydrogels can dissipate thermal energy through evaporation. Thermoelectric materials enable direct conversion of heat into electricity and are widely used for active temperature regulation. Under a specific current, they can achieve cooling on one side. The principle of thermoelectric cooling is based on the Peltier effect in semiconductor materials (Figure S3). Figure 3a shows an enlarged view of the TE module. When current passes through the interface of two different conductive materials, the energy levels of electrons change, resulting in cold and hot surfaces at the two ends. When the SMA artificial muscle cools and returns to its initial state, the SMA wire releases heat. This heat can be actively absorbed by the cold side of the TE module. The aforementioned hydrogel layer can enhance the heat-dissipation performance of the TE module’s hot side, thereby improving the cooling efficiency of the cold side.
3.2. Simulation Analysis
3.2.1. Simulation Setup
Through COMSOL simulation, the thermal characteristics of the SMA wire were investigated to elucidate its behavior within the novel SMA artificial muscle. The temperature changes of the SMA wire were studied under different heat-dissipation schemes, including silicone rubber-layer-based cooling, hydrogel-layer-based cooling, and hydrogel–thermoelectric layer (HTL)-based cooling. Meanwhile, the multi-physical coupling response of the SMA wire was also investigated, encompassing solid heat transfer, the Joule heating effect, and thermoelectric effects. For ease of simulation analysis, appropriate simplifications were made to the geometric model and its parameters during the simulation process. The following assumptions were applied: (i) the thermal expansion of materials during the phase transformation of the SMA wire can be neglected; (ii) the novel SMA artificial muscle can be simplified into a system consisting of the SMA wire, an elastic substrate, and thermoelectric modules; (iii) certain physical property parameters of the hydrogel were set to be identical to those of water.
To explore the transient temperature changes in the SMA wire, simulation studies were conducted. Below is the governing heat-conduction equation the temperature of the SMA wire:
where is the density, is the heat capacity at constant pressure, T is the working temperature, t is the working time, u is the input current, is the thermal conductivity, Q is the heat source, and Qted is the thermoelastic damping.
The thermoelectric module is mainly composed of Bi2Te3 particles, which exhibit a high thermoelectric figure of merit (ZT). The performance of thermoelectric materials is quantitatively characterized by this parameter, which is expressed as follows:
where S is the Seebeck coefficient, is the conductivity of Bi2Te3, is the thermal conductivity of Bi2Te3, and T is the working temperature.
Based on the actual size and power limitations of SMA artificial muscles, we considered the impact of thermoelectric module size (10 mm × 10 mm × 1.95 mm) on the entire system to ensure that it can meet cooling requirements without excessively increasing the volume of the system. Table 1 and Table 2, respectively, list the parameter settings for SMA wires and bismuth tellurium particles used in the simulation. These represent the best configurations obtained through multiple simulation-based optimizations to ensure ideal temperature changes were achieved within the given input voltage range, thereby effectively driving the SMA. The temperature change in the SMA wire within 10 s was studied through simulation. Current was applied to the SMA wire within the first 5 s while keeping the thermoelectric module in an unpowered state; within the next 5 s, the current to the SMA wire was cut off and the thermoelectric module was started.

Table 1.
Parameter settings for SMA wires in the simulation.
Table 2.
Parameter settings for bismuth telluride particles in the simulation.
3.2.2. Simulation Results and Discussions
Figure 3b–e illustrate the temperature variations in SMA wires under different conditions. Specifically, Figure 3b,c depict the impacts of current amplitude on the temperature of SMA wires with a hydrogel layer and a heat-transfer layer (HTL), respectively. The results show that when the current amplitude was increased within the initial 5 s, the temperature of the SMA wire rapidly rose, reaching its peak at 5 s. This indicates that within the temperature tolerance range of the SMA wire, the heating rate could be accelerated by increasing the amplitude of the activation current.
Figure 3d shows the temperature trends of SMA wires under different heat-dissipation conditions with a constant driving current. When the currents through both the SMA wire and the thermoelectric module were turned off, the heating curves of SMA wires under HTL conditions closely resembled those observed under hydrogel-layer conditions. This is because during this period, the heat-transfer layer did not affect the SMA artificial muscle. However, as a passive cooling strategy, hydrogel influenced the heating and cooling processes of the SMA wire. The results indicate that the heating rate and maximum temperature of SMA wires with a hydrogel layer and HTL were significantly lower than those of SMA wires with a silicone rubber layer. Therefore, to achieve the same temperature, SMA wires on a hydrogel layer and HTL substrate require higher current values compared to SMA wires on a silicone rubber substrate.
Figure 3e compares the thermal dynamic responses of SMA wires under three cooling schemes driven by different currents to reach similar maximum temperatures. It was found that the temperature drop rate of SMA wires with HTL was faster than those of SMA wires with hydrogel and silicone rubber substrates. Additionally, when they were heated to the same temperature, SMA wires using the HTL scheme exhibited significantly faster cooling compared to those using other schemes due to the active heat absorption by the thermoelectric module, which accelerated the cooling of the SMA.
Figure 4a–c present cross-sectional temperature distributions of SMA artificial muscles with similar peak temperatures but different cooling solutions at three critical time points (t = 0 s, 5 s, and 10 s). A comparison of the third images of Figure 4a–c, reveals that the SMA wires with the HTL solution returned to a temperature close to room temperature (35 °C), whereas those with silicone rubber and hydrogel layers were measured at 53 °C and 44 °C, respectively. In summary, finite-element simulations confirmed the effectiveness of the proposed solution in enhancing the cooling rate of SMA.
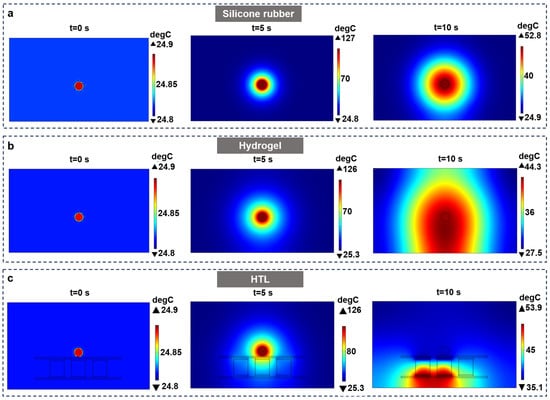
Figure 4.
Temperature distribution across the cross-section of the SMA artificial muscle under different heat-dissipation schemes: (a) silicone rubber-based heat dissipation; (b) hydrogel layer-based heat dissipation; (c) HTL-based heat dissipation.
4. Performance Evaluation of Core Components of the SMA Artificial Muscle
4.1. Optimized Selection and Thermomechanical Characterization of SMA Wires
To comprehensively characterize the performance metrics of SMA wires, the effects of wire diameter, voltage type, and voltage amplitude on the temperature and contraction length of the SMA were systematically investigated. Figure 5a illustrates the performance-testing setup for the SMA wire. The SMA wire (90 °C HT Flexinol, DYNALLOY, Irvine, CA, USA) was fixed on the test bench with a 50 g weight suspended below as the load. The contraction length of the SMA wire was measured using a laser displacement sensor (LK-G150, Keyence, Itasca, IL, USA), while temperature variations were monitored using an infrared thermal imager (FOTRIC-616C). The motion of the SMA wire was driven by an NF high-power bipolar power supply (BP4610), and data were acquired and power parameters controlled using an NI data-acquisition device (NIPXle-6358). All measurement data were visualized in LabVIEW 2025 Q1.
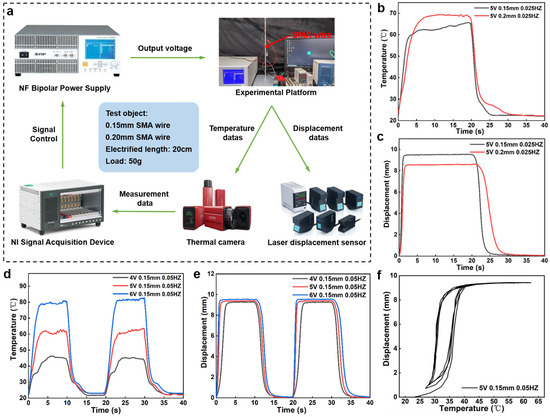
Figure 5.
Performance analysis of SMA wires. (a) Testing platform for SMA wires. Influence of wire diameter on SMA wires; (b) temperature-variation curves; (c) displacement-variation curves. Influence of voltage amplitude on SMA wires (0.15 mm, 0.05 Hz): (d) temperature-variation curves; (e) displacement-variation curves; (f) hysteresis relationship between temperature and displacement of SMA wires.
Figure 5b,c present the temperature and displacement variations of two different diameters of SMA wires (0.15 mm and 0.20 mm) under square-wave voltage (5 V, 0.025 Hz), where the first 20 s represent the powered state of the SMA wire and the subsequent 20 s represent the unpowered state. From the temperature curves, it can be observed that the 0.15 mm SMA wire exhibited faster heating and cooling rates. In the displacement-variation curves, the 0.15 mm SMA wire demonstrated quicker contraction and recovery, indicating that the 0.15 mm SMA wire could execute actuation motions and return to its initial state more rapidly. These experiments fully confirm that, compared to the 0.20 mm SMA wire, the 0.15 mm SMA wire possessed superior actuation-response performance. Therefore, this study focused on using the 0.15 mm SMA wire for performance testing and further research on SMA artificial muscles. Further investigations explored the impact of voltage amplitude on the actuation performance of the SMA wire. Figure 5d,e show the temperature and displacement variations of the 0.15 mm SMA wire under different voltages (4 V, 5 V, 6 V). As shown in Figure 5d, within a certain range, higher driving voltage amplitudes resulted in faster heating, greater contraction, and increased actuation speed. However, the extent of this trend was limited; when the voltage exceeded a certain threshold, the actuation speed of the SMA wire no longer increased significantly. As shown in Figure 5e, the displacement curves for driving voltages of 5 V and 6 V nearly overlapped during the first two seconds. According to Joule’s law, for purely resistive circuits, higher voltage leads to greater heat generation. Thus, higher amplitudes of driving voltage resulted in more heat that the SMA wire had to dissipate during the cooling phase and thus in longer cooling times. Based on the influence of voltage amplitude on the speeds of actuation and recovery of the SMA wire, selecting an appropriate voltage for driving the SMA wire is an effective approach to enhancing the overall actuation frequency of the SMA wire. Additionally, as shown in Figure 5d, the temperature curve represented in black shows a significant slowdown in heating and cooling rates near 35 °C and 29 °C, likely due to phase transitions in the SMA wire.
Figure 5f illustrates the relationship between temperature and displacement of the SMA wire under sinusoidal signal excitation (5 V, 0.05 Hz). During the phase transition of the SMA wire, a nonlinear hysteresis relationship exists between temperature and displacement. This nonlinear hysteresis is one of the key results of the shape-memory effect and causes the SMA to exhibit complex shape changes in response to temperature variations. The motion of SMA artificial muscles primarily relies on the shape-memory effect (SME) of the SMA wire, which involves four critical phase-transition temperature parameters: martensite start temperature (Ms), martensite end temperature (Mf), austenite start temperature (As), and austenite end temperature (Af). Therefore, the phase-transition temperatures of the SMA wire play a crucial role in the bending motion of SMA artificial muscles. The phase-transition temperatures of the 0.15 mm SMA wire were measured using a Mettler DSC3 differential scanning calorimeter, and the resulting DSC curve is shown in Figure S4. By drawing tangents to the peaks of the endothermic and exothermic curves, the phase-transition temperatures of the SMA wire were further determined, as shown in Table S1. Based on the above performance-test results, under all experimental conditions, the response time of the SMA wire was consistently longer during the cooling–recovery phase than during the heating–actuation phase. Therefore, improving the cooling speed of the SMA wire to reduce its shape-recovery time is key to optimizing the bending performance of SMA artificial muscles.
4.2. Swelling Behavior of Agar/Polyacrylamide Hydrogel
The mass of the agar/polyacrylamide double-network hydrogel was measured before and after water loss using an electronic balance, and the water content (W%) of the hydrogel was calculated using the following formula:
where W0 and Wt represent the hydrogel mass before and after dehydration, respectively. Due to the slow natural water loss of the hydrogel in open air, a blast-drying oven (50 °C) was used to accelerate the dehydration process. The average hydrogel mass was calculated by measuring the masses of three independent samples.
It can be seen from the principle of passive cooling that the dehydration performance of hydrogel determines the heat-dissipation performance of passive cooling. Therefore, Figure 6a–c show images of hydrogels before, during, and after dehydration, respectively. As the water content of the hydrogel decreased, its volume and weight gradually shrank, but its hardness increased. The experimentally measured W0 and Wt were 19.4 g and 3.9 g, respectively, indicating that the water content of the hydrogel was 79.9%. Thus, it can be seen that the designed artificial muscle has good passive heat-dissipation performance.
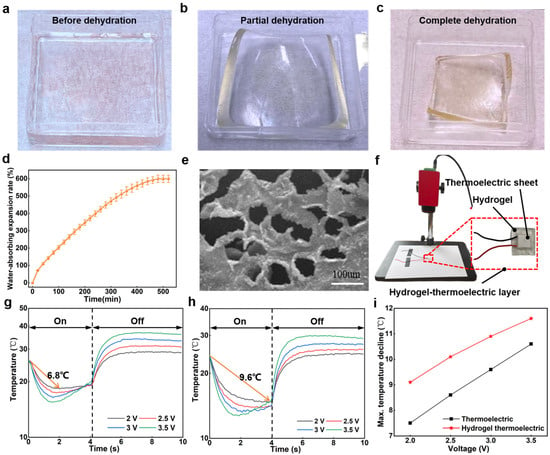
Figure 6.
Hydrogel analysis and heat-dissipation testing of the SMA artificial muscle. Dehydration behavior of the developed hydrogel: (a) before dehydration, (b) partially dehydrated, and (c) fully dehydrated. (d) Swelling ratio-variation curve of the hydrogel. (e) Microstructural morphology of the hydrogel. (f) Infrared imaging platform used for thermal analysis of the heat-dissipation module. Under square-wave voltages of different amplitudes, (g) surface-temperature variation over time on the cold side of the thermoelectric module and (h) surface-temperature variation over time on the cold side of the HTL. (i) Comparison of maximum temperature drops on the cold sides of the thermoelectric module and HTL.
The dried agar/polyacrylamide double-network hydrogel was initially weighed, and its mass was recorded as m0. The hydrogel was then immersed in deionized water for 20 min, after which time it was removed. Subsequently, the surface of the hydrogel was carefully wiped with filter paper to remove excess moisture. The mass of the hydrogel after immersion was recorded as m1. This process was repeated until the mass of the hydrogel remained constant. Three independent samples were tested, and the average swelling ratio was calculated. The swelling ratio of the hydrogel (s%) was defined as follows:
The agar/polyacrylamide double-network hydrogel prepared using a chemical cross-linking method exhibited excellent water absorption and swelling performance. External water molecules rapidly penetrated into the hydrogel network through osmosis, enabling fast water absorption. As shown in Figure 6d, at room temperature, the swelling ratio of the hydrogel exceeded 200% within 100 min. As the soaking time in the deionized water environment increased, the swelling ratio reached up to 600% within 480 min. This study demonstrates that the agar/polyacrylamide double-network hydrogel prepared in this work exhibits superior water-absorption properties. Additionally, if the hydrogel loses water, it can be placed in water to quickly reabsorb water and swell—it is a recyclable material.
The microstructure of the agar/polyacrylamide double-network hydrogel was observed using scanning electron microscopy (SEM). First, the prepared hydrogel sample was placed in deionized water until its swelling stabilized. It was then immersed in liquid nitrogen and subsequently freeze-dried in a lyophilizer. Afterward, to enhance the material’s conductivity, a layer of gold particles was sputter-coated onto the surface of the hydrogel. Figure 6e shows its microstructure. The prepared agar/polyacrylamide double-network hydrogel was observed to possess a porous skeleton structure, which provides suitable channels for the ingress and egress of water molecules. Moreover, it can rapidly and stably dissipate heat for the SMA wire.
4.3. Thermal Performance Testing of Proposed Heat-Dissipation Module
To investigate the thermodynamic characteristics of the cold sides of thermoelectric modules and hydrogel-based thermoelectric coolers (HTLs) under different input voltages, a temperature-testing platform was established and measurements were taken using an infrared camera (616C, FOTRIC Inc., Shanghai, China), as shown in Figure 6f. Each HTL consisted of a thermoelectric module encapsulated within a hydrogel, with its cold side directly exposed to the air. The dimensions of the thermoelectric module and the hydrogel were 10 mm × 10 mm × 1.95 mm and 15 mm × 15 mm × 2.5 mm, respectively.
Figure 6g,h show the temperature changes at the cold sides of the thermoelectric module and HTL at input voltages of 2 V, 2.5 V, 3 V, and 3.5 V, respectively. As shown in Figure 6g, as the amplitude of the input voltage increased, the temperature drop at the cold side of the thermoelectric module became more pronounced. At an input voltage of 2 V, the cold-side temperature of the thermoelectric module decreased from an initial state of 26 °C to 19 °C in steady state (a drop of 7 °C), whereas at an input voltage of 3.5 V, the temperature dropped to 16 °C in steady state (a drop of 10 °C). From Figure 6h, it can be seen that the thermoelectric module encapsulated in the hydrogel cooled down faster. Moreover, at an input voltage of 3.5 V, the steady-state temperature of the cold side of the thermoelectric module was 13 °C (a drop of 12 °C).
Figure 6g,h together reveal that when the driving voltage reached a certain value, the surface temperatures of the cold sides of both the thermoelectric module and HTL began to rise at certain moments before 4 s. This phenomenon occurred because the forward and reverse heat transfer of the thermoelectric module reached equilibrium at this point, causing rapid accumulation of excess heat at the hot side, which then transferred to the cold side, thereby stopping the continuous temperature decrease at the cold side. Additionally, during the period of 4–10 s when the thermoelectric module was powered off, the surface temperature of the cold side rose due to the heat transfer from the hot side. It is worth noting that in this test, to directly measure the temperature of the cold side of the thermoelectric module, part of the hydrogel encapsulating the cold side was removed. In practical applications, the thermoelectric module encapsulated in hydrogel can recover to room temperature more quickly. Figure 6i depicts the maximum-temperature-drop curves of the cold sides of the thermoelectric modules under different voltages and cooling schemes. The red line with star symbols shows a significantly greater temperature drop than the black line with square symbols, proving the superior cooling effect of the hydrogel–thermoelectric cooling scheme.
Figure S5 shows thermal images of the thermoelectric module and HTL during the 0–4 s period at an input voltage of 3.5 V for the thermoelectric material. As shown in Figure 6g and Figure S5a, the surface temperature of the cold side of the thermoelectric module first decreased and then increased (from 26.1 °C to 15.7 °C back to 19.3 °C). As shown in Figure 6h and Figure S5b, after the introduction of hydrogel encapsulation, the temperature at the cold side of the thermoelectric module significantly decreased within 0–2 s, and during the 2–4 s period, the temperature increase was gentler compared to that of the unencapsulated module. This is due to the fact that the surface energy at the hot side of the thermoelectric module can be dissipated through evaporation and dehydration of the hydrogel.
5. Bending Response and Applications of SMA Artificial Muscles
5.1. Bending Response Assessment
The experimental setup for the bending test of the SMA artificial muscle mainly consisted of a DC power supply (BP4610, NF Corporation, Tokyo, Japan), an NI device (PXIe-6358 card installed in a PXle-1088 chassis, National Instruments, Austin, TX, USA), a smartphone camera, and a support frame, as shown in Figure S6. The DC power supply applied input voltages to both the SMA artificial muscle and the thermoelectric module. The NI device was used to control the output signals of the DC power supply. A LabVIEW program built on the computer was employed to record and process the data. The camera mounted on the support frame was used to capture the motion of the artificial muscle. As previously described, videos of the artificial muscle’s motion were obtained using the camera equipment, and then the motion trajectory of the SMA artificial muscle was extracted and analyzed using the video-based tracking software Tracker 6.1.6, as shown in Figure 7a. The position of the artificial muscle’s endpoint in the preset coordinate system was captured via a highlighted dot. The bending angle of the SMA artificial muscle was mathematically defined in Figure 7a.
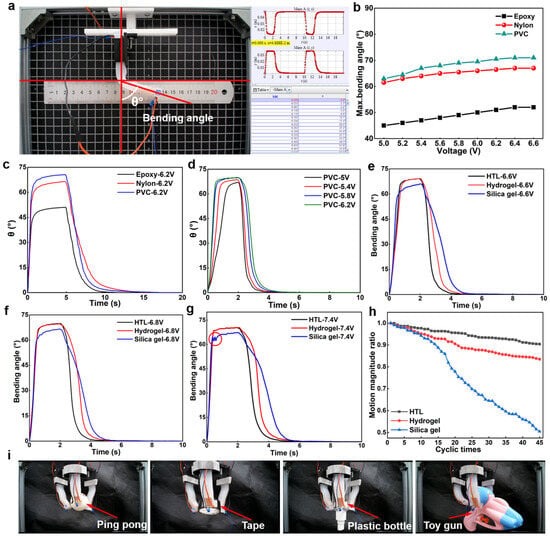
Figure 7.
Bending-response tests and applications of SMA artificial muscles. (a) Tracking measurement and calibration system for SMA artificial muscles using Tracker 6.1.6; (b) Maximum bending angles of SMA artificial muscles with different elastic-plate materials under various voltages; (c) Responses of SMA artificial muscles based on epoxy resin, nylon, and PVC elastic plates under 6.2 V drive; (d) Responses of SMA artificial muscles based on PVC plates under different driving voltages; (e) Comparison of silicone rubber, hydrogel, and HTL SMA artificial muscles under 6.6 V, (f) 6.8 V, and (g) 7.4 V voltage drives; (h) Durability comparison of silicone rubber, hydrogel, and HTL SMA artificial muscles; (i) Scenarios of an SMA soft gripper grasping different objects: ping-pong ball, tape, plastic bottle, and toy gun.
This paper compares the bending performance of three types of SMA artificial muscles using epoxy resin, nylon, and PVC as elastic-plate materials. Figure 7b shows the maximum bending angles of these three different SMA artificial muscles under different input voltages (ranging from 5 V to 6.6 V in 0.2 V increments). The results indicate that SMA artificial muscles with nylon and PVC plates exhibited larger bending angles, with nylon plates achieving a bending deformation of 67° and PVC plates reaching 71°. In contrast, the SMA artificial muscle with epoxy resin plates showed a smaller bending angle due to its higher elastic modulus. Figure S7 presents the maximum bending angles of SMA artificial muscles fabricated using the aforementioned three materials.
Figure 7c depicts the time response of SMA artificial muscles made from epoxy resin, nylon, and PVC plates at a constant 6.2 V for 5 s. To evaluate the recovery time of the SMA artificial muscles as they returned from their maximum position back to their initial position, a metric was defined as follows:
where is the maximum bending angle and is the bending recovery time. Quantitative analysis shows that the response times of epoxy resin, nylon, and PVC were 11.33°/s, 8.22°/s, and 10.60 °C/s, respectively.
This paper aimed to ascertain that the bending deformation of SMA artificial muscles was sufficiently large and that their overall response frequency was improved. Comprehensive experimental studies showed that artificial muscles made with PVC plates exhibited superior bending-deformation capability and faster overall response frequency, making them an ideal choice for the elastic plate of SMA artificial muscles. Figure 7d showed the time response of a PVC plate SMA artificial muscle within 0–5 s when it was driven by SMA wires at different voltages (5 V, 5.4 V, 5.8 V, and 6.2 V). As shown in Figure 7d, as the voltage amplitude increased and the bending response speed of the SMA artificial muscle became faster, but this also led to heat accumulation, which prolonged the recovery time.
Additionally, under high voltage inputs (such as >3.5 V), when the system is suddenly subjected to a large thermal load, the thermoelectric module may temporarily be unable to dissipate heat in a timely manner, which may result in a brief increase in cold-side temperature. It can be seen from the figure that on the basis of the active dissipation of SMA heat at the cold end of the thermoelectric material, the hydrogel, as a static coolant, can absorb the heat of the SMA wire through evaporation and dehydration, thus accelerating the heat dissipation at the hot end of the thermoelectric material and contributing to the cooling effect at the cold end.
Subsequently, the dynamic bending response of SMA artificial muscles under different heating schemes was investigated. In this paper, SMA artificial muscles with a matrix solely composed of silicone rubber, i.e., those without any cooling scheme, are referred to as silicone rubber artificial muscles. Muscles containing an HTL matrix with inactive thermoelectric modules during testing are called hydrogel SMA artificial muscles; when the thermoelectric modules are active, they are termed HTL SMA artificial muscles. During subsequent tests, a constant driving voltage was applied to the SMA wires while the thermoelectric module remained off from 0 to 2 s. Between 2 and 4 s, the SMA wires were turned off, and a voltage of 7 V was applied across two series-connected thermoelectric plates. After 4 s, both the SMA wires and the thermoelectric modules were simultaneously turned off.
Figure S8a–c show the changes in bending angle over time for silicone rubber, hydrogel, and HTL SMA artificial muscles under different constant-voltage drives. It was observed that as the driving voltage increased from 6 V to 7.2 V, the bending angles of each type of SMA artificial muscle rose accordingly. Figure 6e depicts the time evolution of the bending angles of these three types of SMA artificial muscles under a 6.6 V drive. On the one hand, comparing the maximum bending extent of the three types of SMA artificial muscles, it was found that both hydrogel and HTL SMA artificial muscles achieve similar deformation magnitudes, with maximum bending angles reaching 70°, exceeding the 60° of the silicone rubber SMA artificial muscle. This is attributed to the lower elastic modulus of hydrogel (in the KPa range) compared to silicone rubber (in the MPa range), allowing for greater bending deformation under the same driving voltage. On the other hand, a comparison of the driving speeds of the three revealed that during the first two seconds, the driving response speeds of hydrogel and HTL SMA artificial muscles were slightly slower than that of the silicone rubber SMA artificial muscle due to the passive cooling effect of hydrogel causing a decrease in the heating rate of the SMA wire. Moreover, due to the combined effects of passive cooling by hydrogel and active cooling by thermoelectric plates, HTL SMA artificial muscles exhibited faster response speeds during the cooling–recovery phase. Quantitative analysis showed that the cooling–recovery time for HTL SMA artificial muscles was 2.1 s, which was 19% shorter than that of hydrogel SMA artificial muscles (2.6 s) and 32% shorter than that of silicone rubber SMA artificial muscles (3.1 s). Furthermore, it was observed that the higher the input voltage, the faster the response speed and the greater the bending angle. However, the heat generated by the power consumption of the hotspot module also increased, resulting in a longer cooling time. Nonetheless, through the proposed active–passive cooling strategy, the cooling time was further shortened, achieving fast response speed, large bending angle, and rapid cooling. In practical applications, the trade-off between response speed and energy efficiency must be considered. To address with, the cooling rate should be optimized as much as possible to improve energy efficiency while ensuring sufficient response speed and bending angle. The HTL-based artificial muscle demonstrated these performance characteristics within a certain output voltage range.
Figure 7f illustrates the time variation in the bending angle of silicone rubber, hydrogel, and HTL SMA artificial muscles under a voltage of 6.8 V. Unlike in Figure 7e, under a voltage of 6.8 V, the curves of all three overlap completely during the heating phase, indicating that although the passive cooling of hydrogel reduced the rate of temperature rise in the SMA wire, when the driving voltage was sufficiently high, the driving speed of the SMA artificial muscle was fast enough to make the negative impact of hydrogel on the heating of SMA artificial muscles negligible. Based on quantitative analysis shown in Figure 7f, the cooling–recovery time for HTL artificial muscles was 2.3 s, which was 20% and 32% shorter than those of hydrogel (2.9 s) and silicone rubber (3.3 s) SMA artificial muscles, respectively.
Figure 7g depicts the time variation in the bending angle of the three types of SMA artificial muscles under a voltage of 7.4 V. As indicated by the red circled curve, excessively high driving voltages may accelerate the driving speed of the SMA wire, potentially leading to vibrations during bending movements. It can be inferred that the thermomechanical properties of hydrogel contributed to some extent to suppressing the vibration of SMA artificial muscles, thereby maintaining system stability at high driving voltages.
A 6.8 V, 0.125 Hz square wave signal with a duty cycle of 25% (2 s of heating time, 6 s of cooling time) was used to continuously drive SMA artificial muscles made of silicone rubber, hydrogel, and HTL materials, yielding the results shown in Figure 7h. These results reveal that heat accumulation over multiple cycles caused a gradual reduction in deformation of the artificial muscles. This phenomenon can be attributed to incomplete heat dissipation in a single cycle and the accumulation of heat in SMA wires over multiple cycles. As a result, the corresponding cooling time gradually lengthened. When the cooling time of the SMA wire exceeded the set 6 s, it became significantly more challenging to return to the initial position of the previous cycle. With the increase in cycle numbers, the initial position of the current cycle increasingly deviated from the initial position of the first cycle for SMA artificial muscles, resulting in a reduction in the deformation magnitude of SMA artificial muscles over multiple cycles.
As shown in Figure 7h, HTL SMA artificial muscles exhibited enhanced durability over multiple cycles. This improvement is attributed to the combined effects of hydrogel and thermoelectric materials, which reduced heat accumulation in the artificial muscles over multiple cycles. However, silicone rubber SMA artificial muscles exhibited a tendency towards greater heat accumulation due to inherent limitations in heat dissipation. Ultimately, this led to a significant reduction in deformation magnitude over multiple cycles. Specifically, at the 45th cycle, the deformation magnitude of the silicone rubber SMA artificial muscle had decreased to 50.48% of its initial value. In comparison, at this point, the hydrogel and HTL SMA artificial muscles retained 83.53% and 90.42% of their initial deformation values, respectively. These results not only present the mechanical performance of the prepared hydrogels under cyclic dehydration conditions but also demonstrate the effectiveness of the proposed active-and-passive cooling strategy.
In summary, to demonstrate the superiority of the prepared HTL-based artificial muscle, we compared the various properties of different SMA artificial muscles, listing key performance indicators such as materials, input, response frequency, maximum bending angle, and performance after several cycles in Table 3. Although traditional SMA artificial muscles can achieve significant bending, their response frequency is often low, and their durability is insufficient due to poor heat dissipation [44,45,46]. The active-and-passive cooling strategy in this work effectively addresses these problems. Compared to that in Ref. [43], the HTL-based SMA artificial muscle presented in this work exhibited superior response performance. Specifically, the response frequency improved from 0.2 Hz to 0.25 Hz and the maximum bending angle increased from 35° to 71°. This improvement was primarily attributed to the active cooling provided by the thermoelectric modules and the positive impact of the elastic plates on the recovery speed of the SMA artificial muscles.
Table 3.
Performance comparison between different SMA artificial muscles.
5.2. Potential Application
The developed SMA artificial muscles exhibited excellent bending deformation capability and response frequency, meeting the requirements for finger design. The principle of the SMA artificial muscle is analogous to that of natural skeletal muscles. In this case, the SMA wire acts as the flexor, driving the artificial muscle to bend when an input voltage is applied. The elastic PVC plate serves as the extensor, accelerating the recovery of the artificial muscle. This section describes the development of an SMA soft gripper by the assembly of three novel SMA artificial muscles (Figure S9).
The SMA soft gripper consists of two main components: SMA artificial muscles and a frame. The frame was fabricated using polylactic acid (PLA) material via 3D printing and has three interfaces for mounting the three SMA artificial muscles. The SMA wires of the three SMA artificial muscles are connected in series, and the thermoelectric modules are also connected in series. When the SMA wires are powered, the three SMA artificial muscles bend simultaneously and contract toward the center of the frame, enabling the gripper to grasp a target object located in the middle. The SMA artificial muscles can perform gripping actions on various 3D objects, as shown in Figure 7i. The developed SMA soft gripper is capable of grasping a wide range of objects, including regularly shaped items such as small balls, tapes, and plastic bottles, as well as irregularly shaped items like toy guns.
6. Conclusions
To address the issue of slow cooling of SMA wires, we propose a novel SMA artificial muscle that employs a hybrid active-and-passive heat-dissipation strategy. Specifically, thermoelectric modules actively absorb heat, while hydrogel dissipates heat through evaporation/dehydration. The fabrication of the SMA artificial muscle using a layer-by-layer casting method is presented. Additionally, the working principle of the novel heat-dissipation scheme is introduced. Simulation results reveal that the proposed HTL SMA artificial muscle cools faster compared to pure hydrogel or silicone rubber. Through a series of experiments, the performance of the main components within the SMA artificial muscle and its overall bending performance were investigated, and the phase-transition temperature and shape-memory effect of 0.15 mm SMA wires in practical applications were studied. Experimental results demonstrated that the prepared agar/polyacrylamide double-network hydrogel possesses a porous skeleton structure, facilitating the ingress and egress of water molecules. Infrared camera measurements showed that within 4 s, the HTL achieved a temperature drop of 9.6 °C, compared to only 6.8 °C for the thermoelectric module alone. The bending recovery time of the HTL artificial muscle was reduced by 20% compared to hydrogel and by 32% compared to silicone rubber. Cyclic deformation tests indicated that after 45 cycles, the deformation amplitude of the HTL SMA artificial muscle decreased to only 90.42%, whereas those of the hydrogel and silicone rubber SMA artificial muscles decreased to 83.53% and 50.48%, respectively. Furthermore, a soft gripper constructed from the novel SMA artificial muscles was capable of grasping objects of various shapes. In summary, the combination of active and passive heat-dissipation solutions enabled the SMA artificial muscle to achieve excellent durability and rapid cooling, demonstrating its effectiveness in soft gripping systems.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/act14050248/s1. Figure S1: Schematic diagram of the preparation process for agar/polyacrylamide double network hydrogels; Figure S2: Schematic diagram of the manufacturing process for control modules and thermoelectric plates; Figure S3: Principle diagram of the Peltier effect; Figure S4: Differential scanning calorimetry curve of SMA wires; Figure S5: Infrared thermal images of the cold side of a thermoelectric plate at 0-4 s under a voltage of 3.5 V; Figure S6: Testing platform for SMA artificial muscles; Figure S7: Maximum bending states of SMA artificial muscles with different elastic substrates at a driving voltage of 6.6 V; Figure S8: Changes in bending angles of various types of SMA artificial muscles under different voltages; Figure S9: Physical image of a three-finger soft gripper based on SMA artificial muscles; Table S1: Phase transition temperatures of SMA measured by differential scanning calorimetry.
Author Contributions
Conceptualization, Q.Z. and L.X.; Data curation, Q.Z., L.X. and Z.L.; Formal analysis, Q.Z., L.X. and H.C.; Funding acquisition, S.Y.; Investigation, Q.Z.; Methodology, Q.Z. and H.C.; Project administration, S.Y.; Resources, L.X. and L.H.; Software, L.X. and Z.L.; Supervision, S.Y.; Validation, Q.Z. and L.X.; Visualization, L.H.; Writing—original draft, Q.Z., L.X. and H.C.; Writing—review & editing, Q.Z., L.X. and S.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China (No. 12202256, No. 62473244 and No. 62273222), and the Foundation of Science and Technology Commission of Shanghai Municipality (No. 24511103800 and No. 24TS1402300).
Data Availability Statement
All information is available in the manuscript and the Supplementary Materials. Any other information can be provided by the corresponding author upon request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cui, G.; Li, B.; Tian, W.; Liao, W.; Zhao, W. Dynamic modeling and vibration prediction of an industrial robot in manufacturing. Appl. Math. Model. 2022, 105, 114–136. [Google Scholar] [CrossRef]
- Lei, T.; Rong, Y.; Wang, H.; Huang, Y.; Li, M. A review of vision-aided robotic welding. Comput. Ind. 2020, 123, 103326. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, J.; Wang, L.; Yu, Z. Accurate dynamic modeling and control parameters design of an industrial hybrid spray-painting robot. Robot. Comput.-Integr. Manuf. 2020, 63, 101923. [Google Scholar] [CrossRef]
- Mu, X.; Xue, Y.; Jia, Y.-B. Dexterous Robotic Cutting Based on Fracture Mechanics and Force Control. IEEE Trans. Autom. Sci. Eng. 2024, 21, 5198–5215. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Jawed, B.; Soomro, A.M.; Kumar, S.; Hina, A.; Khan, U.; Kim, K.H.; Choi, K.H. Decade of bio-inspired soft robots: A review. Smart Mater. Struct. 2022, 31, 073002. [Google Scholar] [CrossRef]
- Yasa, O.; Toshimitsu, Y.; Michelis, M.Y.; Jones, L.S.; Filippi, M.; Buchner, T.; Katzschmann, R.K. An Overview of Soft Robotics. Annu. Rev. Control Robot. Auton. Syst. 2023, 6, 1–29. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, D.; Yan, P.; Zhou, P.; Zou, J.; Gu, G. Inchworm Inspired Multimodal Soft Robots With Crawling, Climbing, and Transitioning Locomotion. IEEE Trans. Robot. 2022, 38, 1806–1819. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, Y.-X.; Juang, J.-Y. Single-Actuator Soft Robot for In-Pipe Crawling. Soft Robot. 2023, 10, 174–186. [Google Scholar] [CrossRef]
- Fu, L.; Zhao, W.; Ma, J.; Yang, M.; Liu, X.; Zhang, L.; Chen, Y. A Humidity-Powered Soft Robot with Fast Rolling Locomotion. Research 2022, 2022, 9832901. [Google Scholar] [CrossRef]
- Kim, Y.B.; Yang, S.; Kim, D.S. Sidewinder-Inspired Self-Adjusting, Lateral-Rolling Soft Robots for Autonomous Terrain Exploration. Adv. Sci. 2024, 11, 2308350. [Google Scholar] [CrossRef]
- Wang, Y.; Du, X.; Zhang, H.; Zou, Q.; Law, J.; Yu, J. Amphibious Miniature Soft Jumping Robot with On-Demand In-Flight Maneuver. Adv. Sci. 2023, 10, 2207493. [Google Scholar] [CrossRef] [PubMed]
- Zhong, T.; Wei, F.; Zhai, Z.; Yang, W. An Untethered Miniature Soft Jumping Robot Inspired by Quadrupeds. J. Bionic Eng. 2023, 20, 1467–1480. [Google Scholar] [CrossRef]
- Wang, X.; Yuan, Z.; Guo, Q.; Wang, W.; Liu, H.; Liu, A.; Ge, Z.; Yu, H.; Yang, W. An Underwater Bionic Snake Soft Robot with Tunable Deformation and Motion Based on Composite Materials. Adv. Mater. Technol. 2023, 8, 2202012. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Weymann, A.; Foroughi, J.; Vardanyan, R.; Punjabi, P.P.; Schmack, B.; Aloko, S.; Spinks, G.M.; Wang, C.H.; Arjomandi Rad, A.; Ruhparwar, A. Artificial Muscles and Soft Robotic Devices for Treatment of End-Stage Heart Failure. Adv. Mater. 2023, 35, 2207390. [Google Scholar] [CrossRef]
- Tan, Y.J.; Mengaldo, G.; Laschi, C. Artificial Muscles for Underwater Soft Robots: Materials and Their Interactions. Annu. Rev. Condens. Matter Phys. 2024, 15, 45–61. [Google Scholar] [CrossRef]
- Oh, S.; Tabassian, R.; Thangasamy, P.; Mahato, M.; Nguyen, V.H.; Nam, S.; Huapeng, Z.; Oh, I.K. Cooling-Accelerated Nanowire-Nitinol Hybrid Muscle for Versatile Prosthetic Hand and Biomimetic Retractable Claw. Adv. Funct. Mater. 2021, 32, 2111145. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2017, 30, 1704407. [Google Scholar] [CrossRef]
- Greco, C.; Kotak, P.; Pagnotta, L.; Lamuta, C. The evolution of mechanical actuation: From conventional actuators to artificial muscles. Int. Mater. Rev. 2022, 67, 575–619. [Google Scholar] [CrossRef]
- Wang, J.; Gao, D.; Lee, P.S. Recent Progress in Artificial Muscles for Interactive Soft Robotics. Adv. Mater. 2020, 33, 2003088. [Google Scholar] [CrossRef]
- Wickramatunge, K.C.; Leephakpreeda, T. Study on mechanical behaviors of pneumatic artificial muscle. Int. J. Eng. Sci. 2010, 48, 188–198. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef]
- Fu, H.; Jiang, Y.; Lv, J.; Huang, Y.; Gai, Z.; Liu, Y.; Lee, P.S.; Xu, H.; Wu, D. Multilayer Dielectric Elastomer with Reconfigurable Electrodes for Artificial Muscle. Adv. Sci. 2023, 10, 2206094. [Google Scholar] [CrossRef]
- Guo, Y.; Qin, Q.; Han, Z.; Plamthottam, R.; Possinger, M.; Pei, Q. Dielectric elastomer artificial muscle materials advancement and soft robotic applications. SmartMat 2023, 4, e1203. [Google Scholar] [CrossRef]
- Wang, H.; Yang, L.; Yang, Y.; Zhang, D.; Tian, A. Highly flexible, large-deformation ionic polymer metal composites for artificial muscles: Fabrication, properties, applications, and prospects. Chem. Eng. J. 2023, 469, 143976. [Google Scholar] [CrossRef]
- Shouji, Y.; Sekine, T.; Ito, K.; Ito, N.; Yasuda, T.; Wang, Y.F.; Takeda, Y.; Kumaki, D.; Santos, F.D.D.; Miyabo, A.; et al. Fast Response, High-Power Tunable Ultrathin Soft Actuator by Functional Piezoelectric Material Composite for Haptic Device Application. Adv. Electron. Mater. 2023, 9, 2201040. [Google Scholar] [CrossRef]
- Lu, J.; Miao, Z.; Wang, Z.; Liu, Y.; Zhu, D.; Yin, J.; Tang, F.; Wang, X.; Ding, W.; Zhang, M. Piezoelectric soft robot driven by mechanical energy. Nano Res. 2022, 16, 4970–4979. [Google Scholar] [CrossRef]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef]
- Du, H.; Li, G.; Sun, J.; Zhang, Y.; Bai, Y.; Qian, C.; Liang, Y. A review of shape memory alloy artificial muscles in bionic applications. Smart Mater. Struct. 2023, 32, 103001. [Google Scholar] [CrossRef]
- Hyeon, K.; Jeong, J.; Chung, C.; Cho, M.; Hussain, S.; Kyung, K.-U. Design of a Wearable Mechanism With Shape Memory Alloy (SMA)-Based Artificial Muscle for Assisting With Shoulder Abduction. IEEE Robot. Autom. Lett. 2022, 7, 10635–10642. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, P.; Zhu, H.; Xia, K.; Ren, T.; Shen, Y.; Li, Y. A variable stiffness soft robotic manipulator based on antagonistic design of supercoiled polymer artificial muscles and shape memory alloys. Sens. Actuators A Phys. 2024, 366, 114999. [Google Scholar] [CrossRef]
- Kim, M.S.; Heo, J.K.; Rodrigue, H.; Lee, H.T.; Pané, S.; Han, M.W.; Ahn, S.H. Shape Memory Alloy (SMA) Actuators: The Role of Material, Form, and Scaling Effects. Adv. Mater. 2023, 35, 2208517. [Google Scholar] [CrossRef] [PubMed]
- Wei, Q.; Ke, D.; Sun, Z.; Wu, Z.; Zhou, Y.; Zhang, D. A Structural Design and Motion Characteristics Analysis of an Inchworm-Inspired Soft Robot Based on Shape Memory Alloy Actuation. Actuators 2024, 13, 43. [Google Scholar] [CrossRef]
- Kashef Tabrizian, S.; Cedric, F.; Terryn, S.; Vanderborght, B. SMA Wire Use in Hybrid Twisting and Bending/Extending Soft Fiber-Reinforced Actuators. Actuators 2024, 13, 125. [Google Scholar] [CrossRef]
- Fei, Y.; Xu, H. Modeling and Motion Control of a Soft Robot. IEEE Trans. Ind. Electron. 2017, 64, 1737–1742. [Google Scholar] [CrossRef]
- Baek, H.; Khan, A.M.; Kim, Y. A bidirectional rotating actuator by using a single shape memory alloy wire in a double bend shape. Sens. Actuators A Phys. 2023, 360, 114526. [Google Scholar] [CrossRef]
- Yuan, H.; Chapelle, F.; Fauroux, J.-C.; Balandraud, X. Concept for a 3D-printed soft rotary actuator driven by a shape-memory alloy. Smart Mater. Struct. 2018, 27, 055005. [Google Scholar] [CrossRef]
- Yang, H.; Xu, M.; Li, W.; Zhang, S. Design and Implementation of a Soft Robotic Arm Driven by SMA Coils. IEEE Trans. Ind. Electron. 2019, 66, 6108–6116. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Han, M.-W.; Kim, T.J.Y.; Ahn, S.-H. An Overview of Shape Memory Alloy-Coupled Actuators and Robots. Soft Robot. 2017, 4, 3–15. [Google Scholar] [CrossRef]
- Chu, X.; Tang, X.; You, H.; Pang, M.; Li, X.; Zhou, W. Smart microchannel heat exchangers with Built-In graded SMA vortex generators that responds to random hotspots. Appl. Therm. Eng. 2023, 226, 120261. [Google Scholar] [CrossRef]
- Choi, K.; Park, S.J.; Won, M.; Park, C.H. Soft fabric muscle based on thin diameter SMA springs. Smart Mater. Struct. 2022, 31, 055020. [Google Scholar] [CrossRef]
- Cheng, S.S.; Kim, Y.; Desai, J.P. New Actuation Mechanism for Actively Cooled SMA Springs in a Neurosurgical Robot. IEEE Trans. Robot. 2017, 33, 986–993. [Google Scholar] [CrossRef] [PubMed]
- Sivaperuman Kalairaj, M.; Banerjee, H.; Lim, C.M.; Chen, P.-Y.; Ren, H. Hydrogel-matrix encapsulated Nitinol actuation with self-cooling mechanism. RSC Adv. 2019, 9, 34244–34255. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ma, Y.; Wu, C.; Wang, Y.; Zhou, S.; Gao, X.; Cao, C. A fast actuated soft gripper based on shape memory alloy wires. Smart Mater. Struct. 2024, 33, 045011. [Google Scholar] [CrossRef]
- Shin, J.; Han, Y.J.; Lee, J.H.; Han, M.W. Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers. Sensors 2023, 23, 1518. [Google Scholar] [CrossRef]
- Wang, W.; Tang, Y.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).