
Research on a Novel Shape-Memory Alloy Artificial Muscle with Active and Passive Heat Dissipation

Abstract
1. Introduction
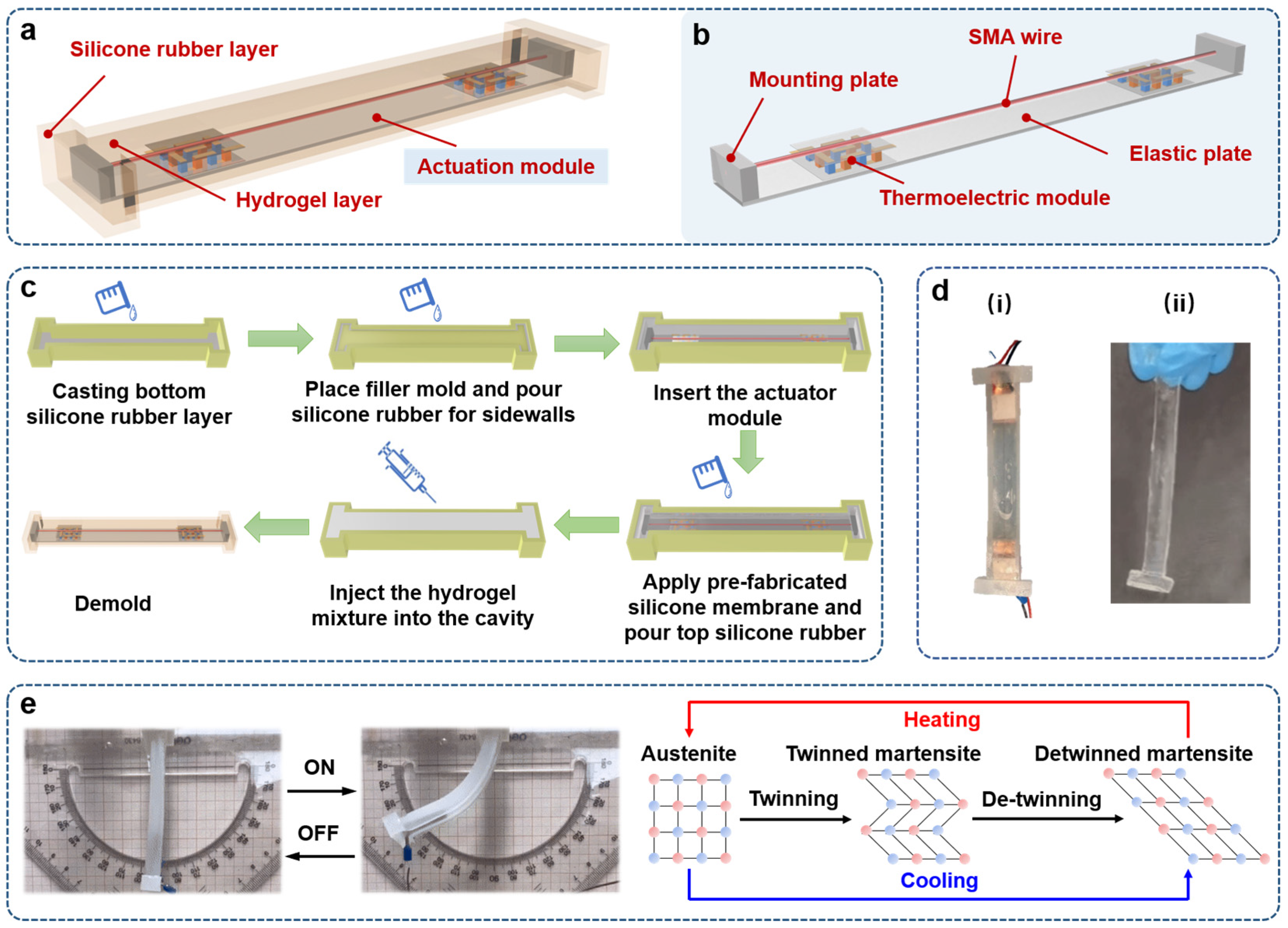
2. Design and Fabrication of SMA-Based Artificial Muscles
2.1. Design Scheme
2.2. Fabrication
2.3. Operational Princple
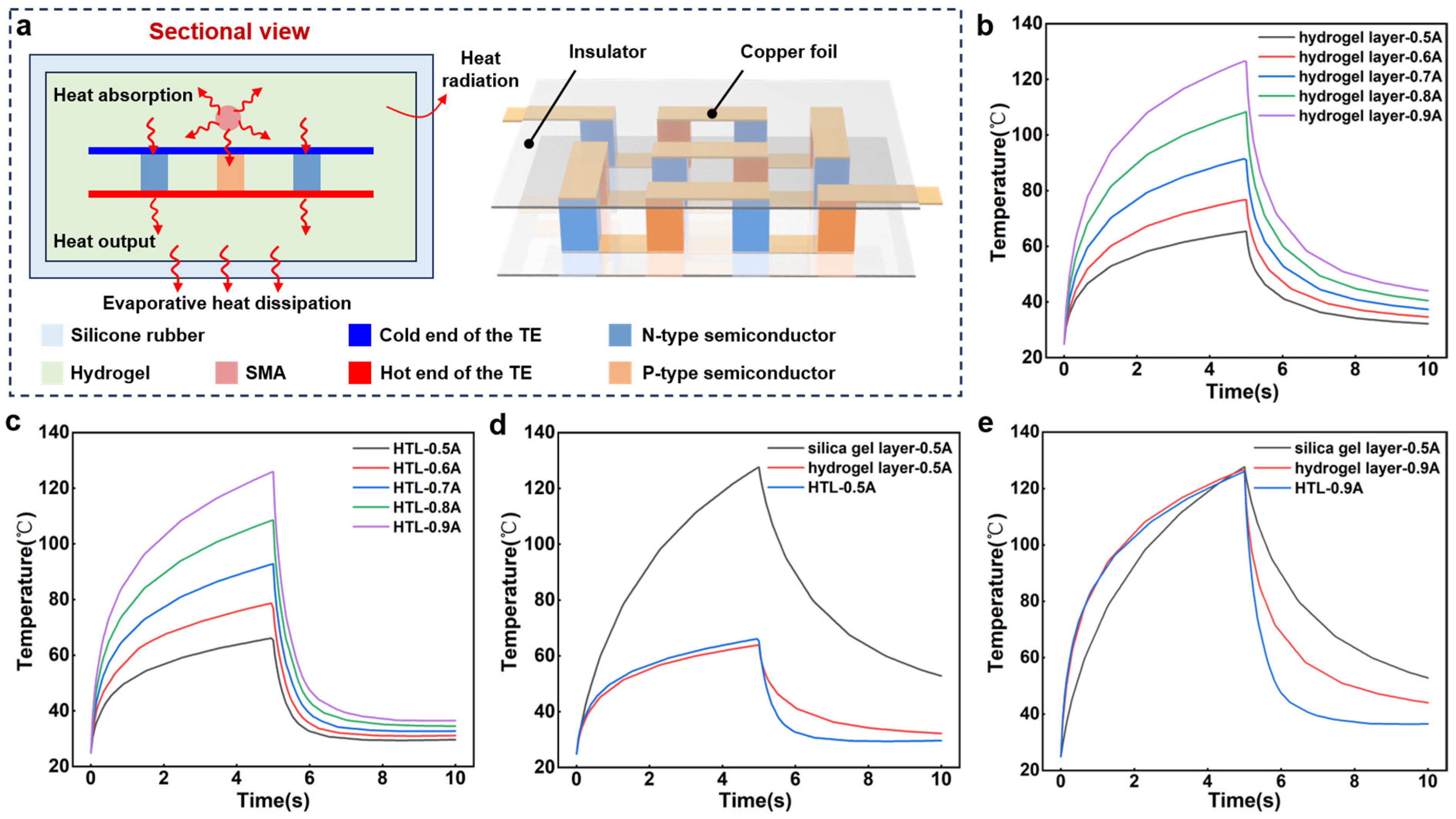
3. Simulation Analysis of Heat-Dissipation Scheme
3.1. Heat-Dissipation Scheme
3.2. Simulation Analysis
3.2.1. Simulation Setup
3.2.2. Simulation Results and Discussions
4. Performance Evaluation of Core Components of the SMA Artificial Muscle
4.1. Optimized Selection and Thermomechanical Characterization of SMA Wires
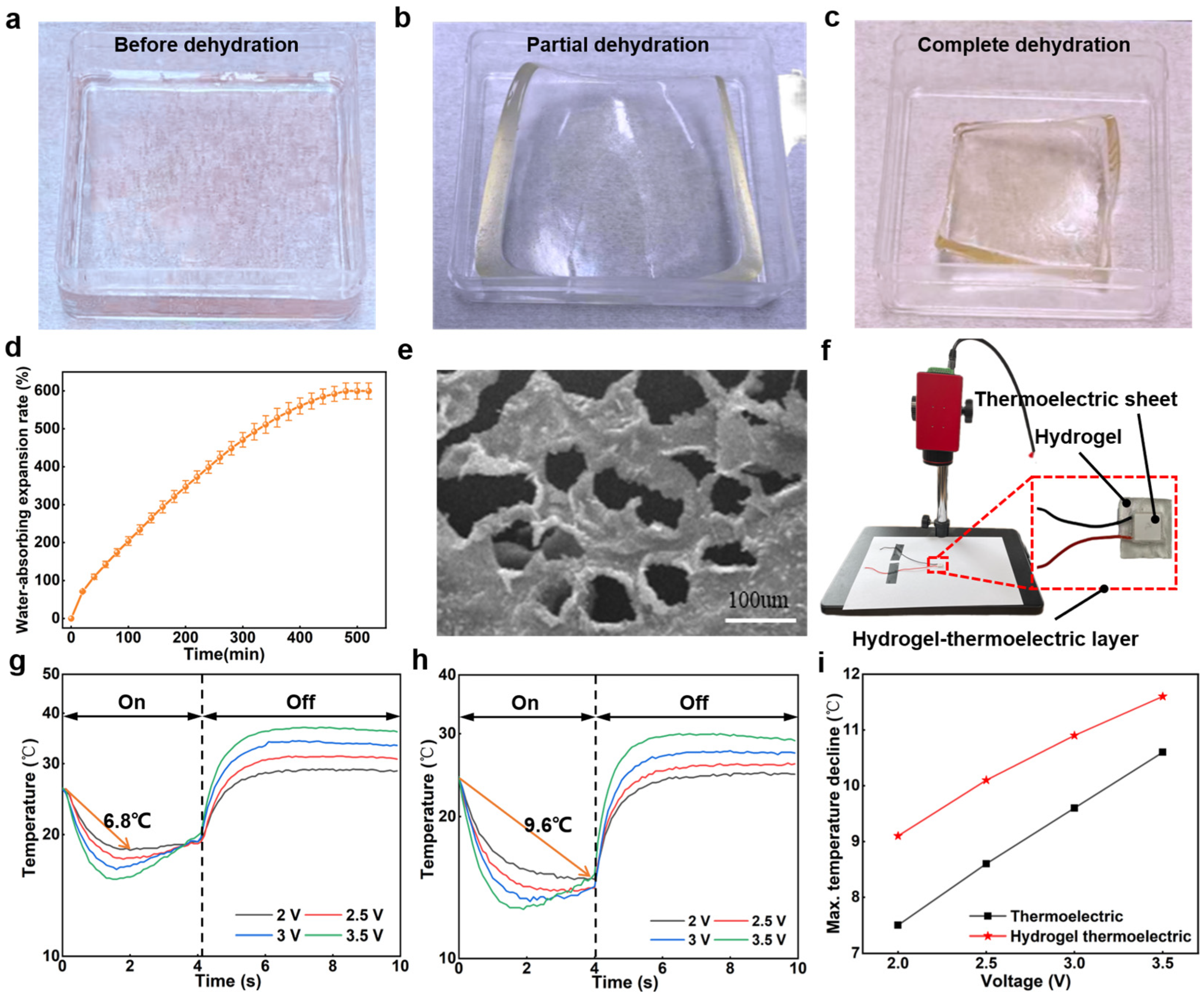
4.2. Swelling Behavior of Agar/Polyacrylamide Hydrogel
4.3. Thermal Performance Testing of Proposed Heat-Dissipation Module
5. Bending Response and Applications of SMA Artificial Muscles
5.1. Bending Response Assessment
5.2. Potential Application
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cui, G.; Li, B.; Tian, W.; Liao, W.; Zhao, W. Dynamic modeling and vibration prediction of an industrial robot in manufacturing. Appl. Math. Model. 2022, 105, 114–136. [Google Scholar] [CrossRef]
- Lei, T.; Rong, Y.; Wang, H.; Huang, Y.; Li, M. A review of vision-aided robotic welding. Comput. Ind. 2020, 123, 103326. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, J.; Wang, L.; Yu, Z. Accurate dynamic modeling and control parameters design of an industrial hybrid spray-painting robot. Robot. Comput.-Integr. Manuf. 2020, 63, 101923. [Google Scholar] [CrossRef]
- Mu, X.; Xue, Y.; Jia, Y.-B. Dexterous Robotic Cutting Based on Fracture Mechanics and Force Control. IEEE Trans. Autom. Sci. Eng. 2024, 21, 5198–5215. [Google Scholar] [CrossRef]
- Ahmed, F.; Waqas, M.; Jawed, B.; Soomro, A.M.; Kumar, S.; Hina, A.; Khan, U.; Kim, K.H.; Choi, K.H. Decade of bio-inspired soft robots: A review. Smart Mater. Struct. 2022, 31, 073002. [Google Scholar] [CrossRef]
- Yasa, O.; Toshimitsu, Y.; Michelis, M.Y.; Jones, L.S.; Filippi, M.; Buchner, T.; Katzschmann, R.K. An Overview of Soft Robotics. Annu. Rev. Control Robot. Auton. Syst. 2023, 6, 1–29. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, D.; Yan, P.; Zhou, P.; Zou, J.; Gu, G. Inchworm Inspired Multimodal Soft Robots With Crawling, Climbing, and Transitioning Locomotion. IEEE Trans. Robot. 2022, 38, 1806–1819. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, Y.-X.; Juang, J.-Y. Single-Actuator Soft Robot for In-Pipe Crawling. Soft Robot. 2023, 10, 174–186. [Google Scholar] [CrossRef]
- Fu, L.; Zhao, W.; Ma, J.; Yang, M.; Liu, X.; Zhang, L.; Chen, Y. A Humidity-Powered Soft Robot with Fast Rolling Locomotion. Research 2022, 2022, 9832901. [Google Scholar] [CrossRef]
- Kim, Y.B.; Yang, S.; Kim, D.S. Sidewinder-Inspired Self-Adjusting, Lateral-Rolling Soft Robots for Autonomous Terrain Exploration. Adv. Sci. 2024, 11, 2308350. [Google Scholar] [CrossRef]
- Wang, Y.; Du, X.; Zhang, H.; Zou, Q.; Law, J.; Yu, J. Amphibious Miniature Soft Jumping Robot with On-Demand In-Flight Maneuver. Adv. Sci. 2023, 10, 2207493. [Google Scholar] [CrossRef] [PubMed]
- Zhong, T.; Wei, F.; Zhai, Z.; Yang, W. An Untethered Miniature Soft Jumping Robot Inspired by Quadrupeds. J. Bionic Eng. 2023, 20, 1467–1480. [Google Scholar] [CrossRef]
- Wang, X.; Yuan, Z.; Guo, Q.; Wang, W.; Liu, H.; Liu, A.; Ge, Z.; Yu, H.; Yang, W. An Underwater Bionic Snake Soft Robot with Tunable Deformation and Motion Based on Composite Materials. Adv. Mater. Technol. 2023, 8, 2202012. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Weymann, A.; Foroughi, J.; Vardanyan, R.; Punjabi, P.P.; Schmack, B.; Aloko, S.; Spinks, G.M.; Wang, C.H.; Arjomandi Rad, A.; Ruhparwar, A. Artificial Muscles and Soft Robotic Devices for Treatment of End-Stage Heart Failure. Adv. Mater. 2023, 35, 2207390. [Google Scholar] [CrossRef]
- Tan, Y.J.; Mengaldo, G.; Laschi, C. Artificial Muscles for Underwater Soft Robots: Materials and Their Interactions. Annu. Rev. Condens. Matter Phys. 2024, 15, 45–61. [Google Scholar] [CrossRef]
- Oh, S.; Tabassian, R.; Thangasamy, P.; Mahato, M.; Nguyen, V.H.; Nam, S.; Huapeng, Z.; Oh, I.K. Cooling-Accelerated Nanowire-Nitinol Hybrid Muscle for Versatile Prosthetic Hand and Biomimetic Retractable Claw. Adv. Funct. Mater. 2021, 32, 2111145. [Google Scholar] [CrossRef]
- Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. 2017, 30, 1704407. [Google Scholar] [CrossRef]
- Greco, C.; Kotak, P.; Pagnotta, L.; Lamuta, C. The evolution of mechanical actuation: From conventional actuators to artificial muscles. Int. Mater. Rev. 2022, 67, 575–619. [Google Scholar] [CrossRef]
- Wang, J.; Gao, D.; Lee, P.S. Recent Progress in Artificial Muscles for Interactive Soft Robotics. Adv. Mater. 2020, 33, 2003088. [Google Scholar] [CrossRef]
- Wickramatunge, K.C.; Leephakpreeda, T. Study on mechanical behaviors of pneumatic artificial muscle. Int. J. Eng. Sci. 2010, 48, 188–198. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef]
- Fu, H.; Jiang, Y.; Lv, J.; Huang, Y.; Gai, Z.; Liu, Y.; Lee, P.S.; Xu, H.; Wu, D. Multilayer Dielectric Elastomer with Reconfigurable Electrodes for Artificial Muscle. Adv. Sci. 2023, 10, 2206094. [Google Scholar] [CrossRef]
- Guo, Y.; Qin, Q.; Han, Z.; Plamthottam, R.; Possinger, M.; Pei, Q. Dielectric elastomer artificial muscle materials advancement and soft robotic applications. SmartMat 2023, 4, e1203. [Google Scholar] [CrossRef]
- Wang, H.; Yang, L.; Yang, Y.; Zhang, D.; Tian, A. Highly flexible, large-deformation ionic polymer metal composites for artificial muscles: Fabrication, properties, applications, and prospects. Chem. Eng. J. 2023, 469, 143976. [Google Scholar] [CrossRef]
- Shouji, Y.; Sekine, T.; Ito, K.; Ito, N.; Yasuda, T.; Wang, Y.F.; Takeda, Y.; Kumaki, D.; Santos, F.D.D.; Miyabo, A.; et al. Fast Response, High-Power Tunable Ultrathin Soft Actuator by Functional Piezoelectric Material Composite for Haptic Device Application. Adv. Electron. Mater. 2023, 9, 2201040. [Google Scholar] [CrossRef]
- Lu, J.; Miao, Z.; Wang, Z.; Liu, Y.; Zhu, D.; Yin, J.; Tang, F.; Wang, X.; Ding, W.; Zhang, M. Piezoelectric soft robot driven by mechanical energy. Nano Res. 2022, 16, 4970–4979. [Google Scholar] [CrossRef]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef]
- Du, H.; Li, G.; Sun, J.; Zhang, Y.; Bai, Y.; Qian, C.; Liang, Y. A review of shape memory alloy artificial muscles in bionic applications. Smart Mater. Struct. 2023, 32, 103001. [Google Scholar] [CrossRef]
- Hyeon, K.; Jeong, J.; Chung, C.; Cho, M.; Hussain, S.; Kyung, K.-U. Design of a Wearable Mechanism With Shape Memory Alloy (SMA)-Based Artificial Muscle for Assisting With Shoulder Abduction. IEEE Robot. Autom. Lett. 2022, 7, 10635–10642. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, P.; Zhu, H.; Xia, K.; Ren, T.; Shen, Y.; Li, Y. A variable stiffness soft robotic manipulator based on antagonistic design of supercoiled polymer artificial muscles and shape memory alloys. Sens. Actuators A Phys. 2024, 366, 114999. [Google Scholar] [CrossRef]
- Kim, M.S.; Heo, J.K.; Rodrigue, H.; Lee, H.T.; Pané, S.; Han, M.W.; Ahn, S.H. Shape Memory Alloy (SMA) Actuators: The Role of Material, Form, and Scaling Effects. Adv. Mater. 2023, 35, 2208517. [Google Scholar] [CrossRef] [PubMed]
- Wei, Q.; Ke, D.; Sun, Z.; Wu, Z.; Zhou, Y.; Zhang, D. A Structural Design and Motion Characteristics Analysis of an Inchworm-Inspired Soft Robot Based on Shape Memory Alloy Actuation. Actuators 2024, 13, 43. [Google Scholar] [CrossRef]
- Kashef Tabrizian, S.; Cedric, F.; Terryn, S.; Vanderborght, B. SMA Wire Use in Hybrid Twisting and Bending/Extending Soft Fiber-Reinforced Actuators. Actuators 2024, 13, 125. [Google Scholar] [CrossRef]
- Fei, Y.; Xu, H. Modeling and Motion Control of a Soft Robot. IEEE Trans. Ind. Electron. 2017, 64, 1737–1742. [Google Scholar] [CrossRef]
- Baek, H.; Khan, A.M.; Kim, Y. A bidirectional rotating actuator by using a single shape memory alloy wire in a double bend shape. Sens. Actuators A Phys. 2023, 360, 114526. [Google Scholar] [CrossRef]
- Yuan, H.; Chapelle, F.; Fauroux, J.-C.; Balandraud, X. Concept for a 3D-printed soft rotary actuator driven by a shape-memory alloy. Smart Mater. Struct. 2018, 27, 055005. [Google Scholar] [CrossRef]
- Yang, H.; Xu, M.; Li, W.; Zhang, S. Design and Implementation of a Soft Robotic Arm Driven by SMA Coils. IEEE Trans. Ind. Electron. 2019, 66, 6108–6116. [Google Scholar] [CrossRef]
- Rodrigue, H.; Wang, W.; Han, M.-W.; Kim, T.J.Y.; Ahn, S.-H. An Overview of Shape Memory Alloy-Coupled Actuators and Robots. Soft Robot. 2017, 4, 3–15. [Google Scholar] [CrossRef]
- Chu, X.; Tang, X.; You, H.; Pang, M.; Li, X.; Zhou, W. Smart microchannel heat exchangers with Built-In graded SMA vortex generators that responds to random hotspots. Appl. Therm. Eng. 2023, 226, 120261. [Google Scholar] [CrossRef]
- Choi, K.; Park, S.J.; Won, M.; Park, C.H. Soft fabric muscle based on thin diameter SMA springs. Smart Mater. Struct. 2022, 31, 055020. [Google Scholar] [CrossRef]
- Cheng, S.S.; Kim, Y.; Desai, J.P. New Actuation Mechanism for Actively Cooled SMA Springs in a Neurosurgical Robot. IEEE Trans. Robot. 2017, 33, 986–993. [Google Scholar] [CrossRef] [PubMed]
- Sivaperuman Kalairaj, M.; Banerjee, H.; Lim, C.M.; Chen, P.-Y.; Ren, H. Hydrogel-matrix encapsulated Nitinol actuation with self-cooling mechanism. RSC Adv. 2019, 9, 34244–34255. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Ma, Y.; Wu, C.; Wang, Y.; Zhou, S.; Gao, X.; Cao, C. A fast actuated soft gripper based on shape memory alloy wires. Smart Mater. Struct. 2024, 33, 045011. [Google Scholar] [CrossRef]
- Shin, J.; Han, Y.J.; Lee, J.H.; Han, M.W. Shape Memory Alloys in Textile Platform: Smart Textile-Composite Actuator and Its Application to Soft Grippers. Sensors 2023, 23, 1518. [Google Scholar] [CrossRef]
- Wang, W.; Tang, Y.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Density | 6500 kg/m3 | |
| Thermal conductivity | ||
| Conductivity | 12,195 S/m | |
| Relative dielectric constant | 1 | |
| Heat capacity at constant pressure | ||
| Martensite start temperature | Ms | 78 °C |
| Martensite end temperature | Mf | 60 °C |
| Austenite start temperature | As | 80 °C |
| Austenite end temperature | Af | 108 °C |
| Parameters | Symbols | Values |
|---|---|---|
| Density | 7700 kg/m3 | |
| Thermal conductivity | ||
| Conductivity | 1.1 × 105 S/m | |
| Relative dielectric constant | 1 | |
| Heat capacity at constant pressure | ||
| N-type Seebeck coefficient | 2 × 10−4 V/K | |
| P-type Seebeck coefficient | 2 × 10−4 V/K |
| Materials | Input | Response Frequency | Maximum Bending Angle | Cycle (Performance) | Ref. |
|---|---|---|---|---|---|
| PDMS | 0.6 A | Extremely low | 83.5° | —— | [46] |
| Textile | 0.08~0.16 A | 0.02 Hz | 157° | —— | [45] |
| PTFE | 24 V | 0.11 Hz | —— | 7 (92.21%) | [44] |
| Hydrogel | 7 V | 0.2 Hz | 35° | 45 (83%) | [43] |
| Silicone rubber | 6.8 V | 0.2 Hz | 60° | 45 (50.48%) | This work |
| Hydrogel | 6.8 V | 0.22 Hz | 71° | 45 (83.53%) | |
| HTL | 6.8 V | 0.25 Hz | 71° | 45 (90.42%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Xu, L.; Chen, H.; Li, Z.; Huang, L.; Yi, S. Research on a Novel Shape-Memory Alloy Artificial Muscle with Active and Passive Heat Dissipation. Actuators 2025, 14, 248. https://doi.org/10.3390/act14050248
Zhang Q, Xu L, Chen H, Li Z, Huang L, Yi S. Research on a Novel Shape-Memory Alloy Artificial Muscle with Active and Passive Heat Dissipation. Actuators. 2025; 14(5):248. https://doi.org/10.3390/act14050248
Chicago/Turabian StyleZhang, Qin, Liang Xu, Hao Chen, Zhou Li, Liwu Huang, and Sicheng Yi. 2025. "Research on a Novel Shape-Memory Alloy Artificial Muscle with Active and Passive Heat Dissipation" Actuators 14, no. 5: 248. https://doi.org/10.3390/act14050248
APA StyleZhang, Q., Xu, L., Chen, H., Li, Z., Huang, L., & Yi, S. (2025). Research on a Novel Shape-Memory Alloy Artificial Muscle with Active and Passive Heat Dissipation. Actuators, 14(5), 248. https://doi.org/10.3390/act14050248