
The Optimization Design of Variable Valve Parameters for Internal Combustion Engines Considering the Energy Consumption of a Composite Electromagnetic Valve Mechanism


Abstract

1. Introduction
2. Principles and Performance of the Composite Electromagnetic Valve Mechanism
3. Camless Engine Modeling, Validation, and Simulation Analysis
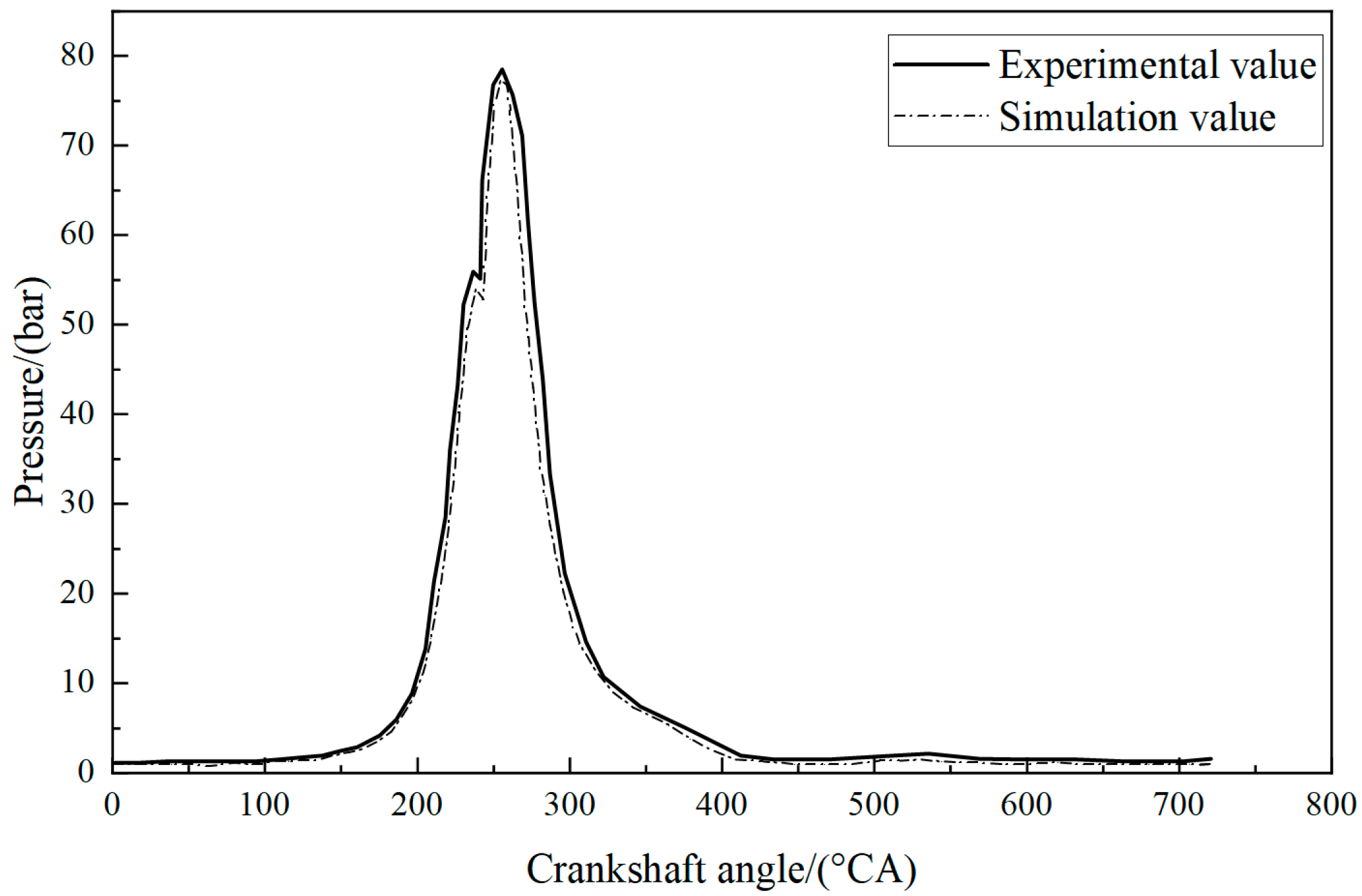
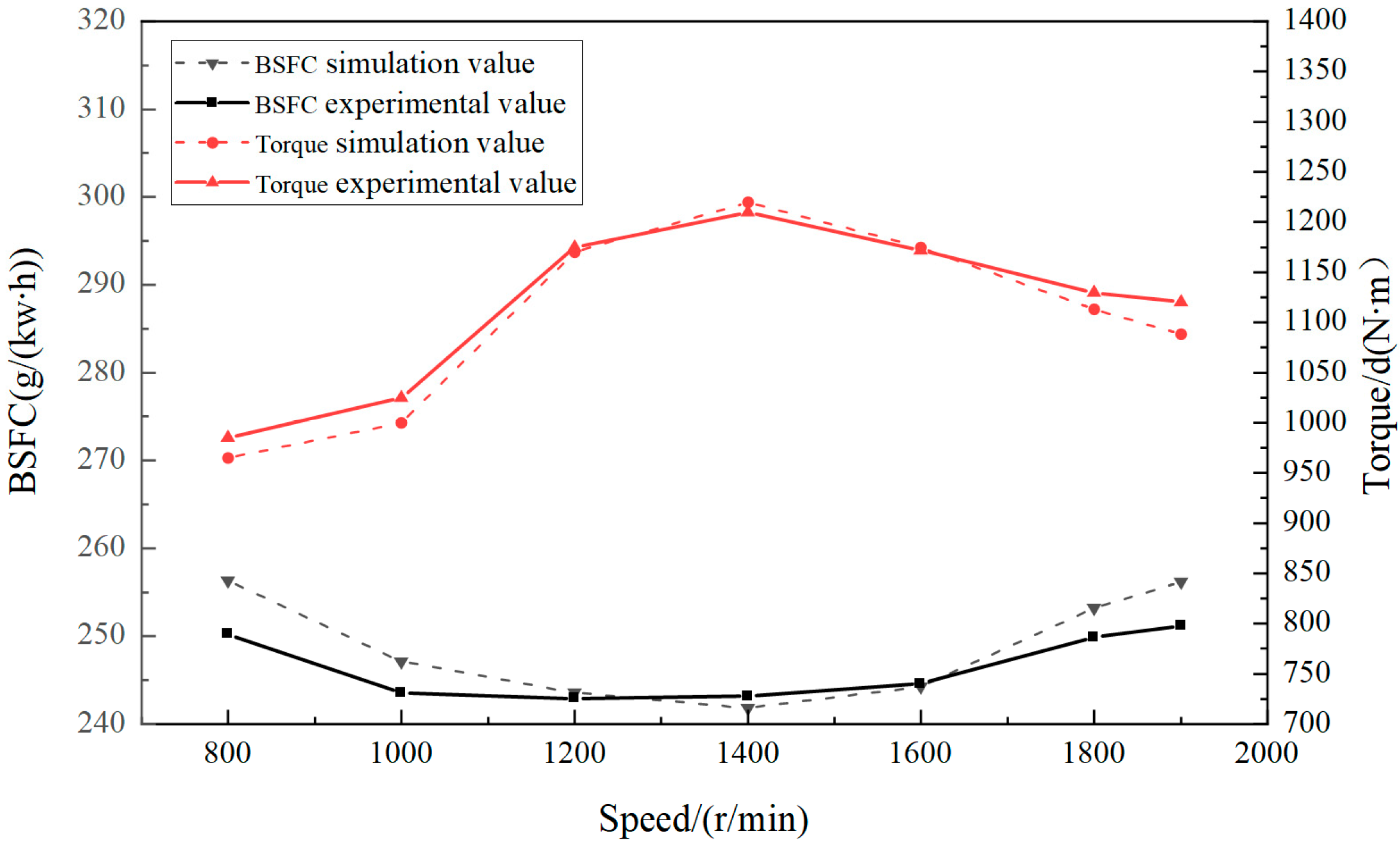
3.1. Model Development and Validation
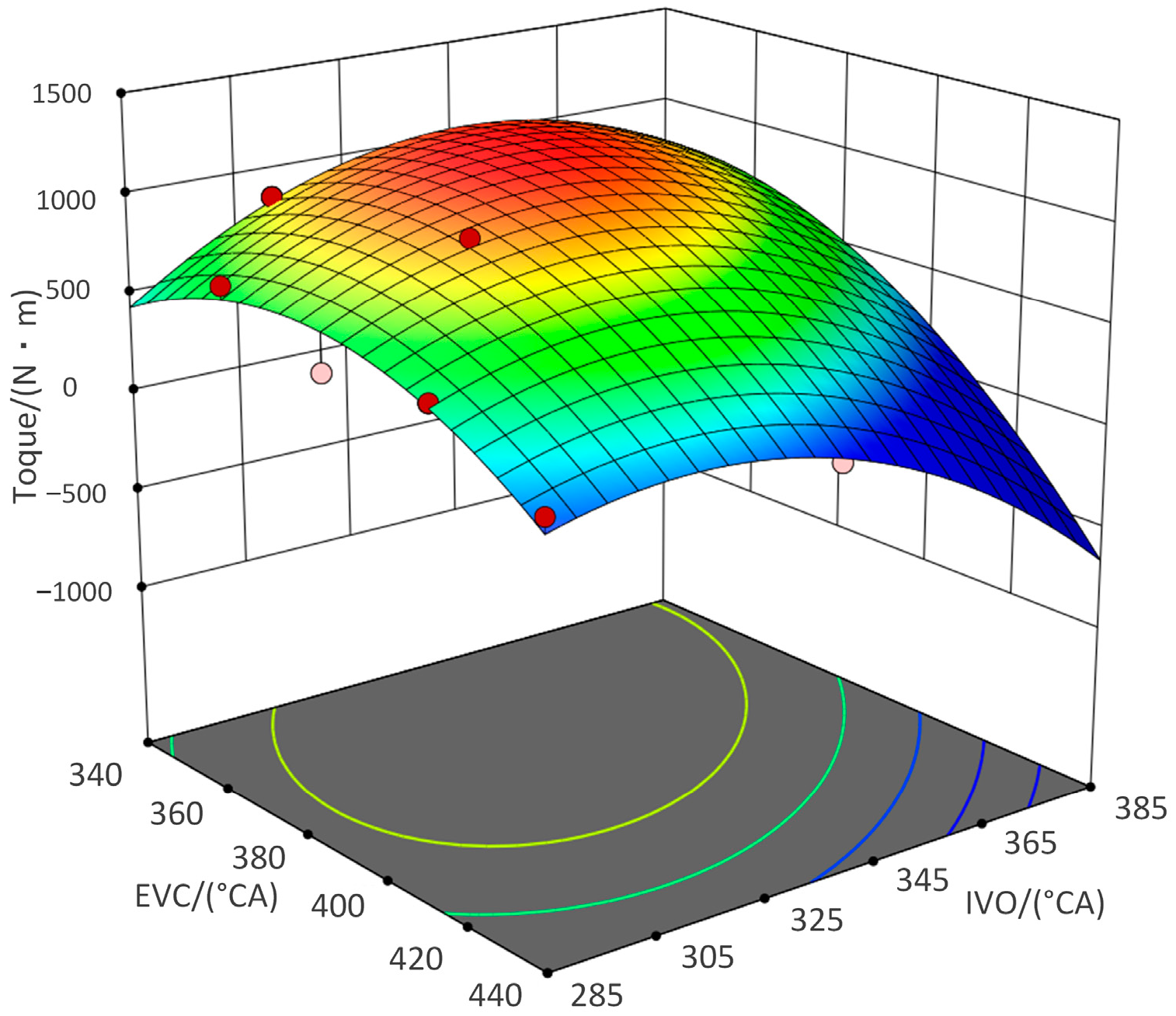
3.2. Effects of Variable Valve Parameters on Engine Performance
4. Multi-Objective Optimization of Fully Variable Valve Parameters
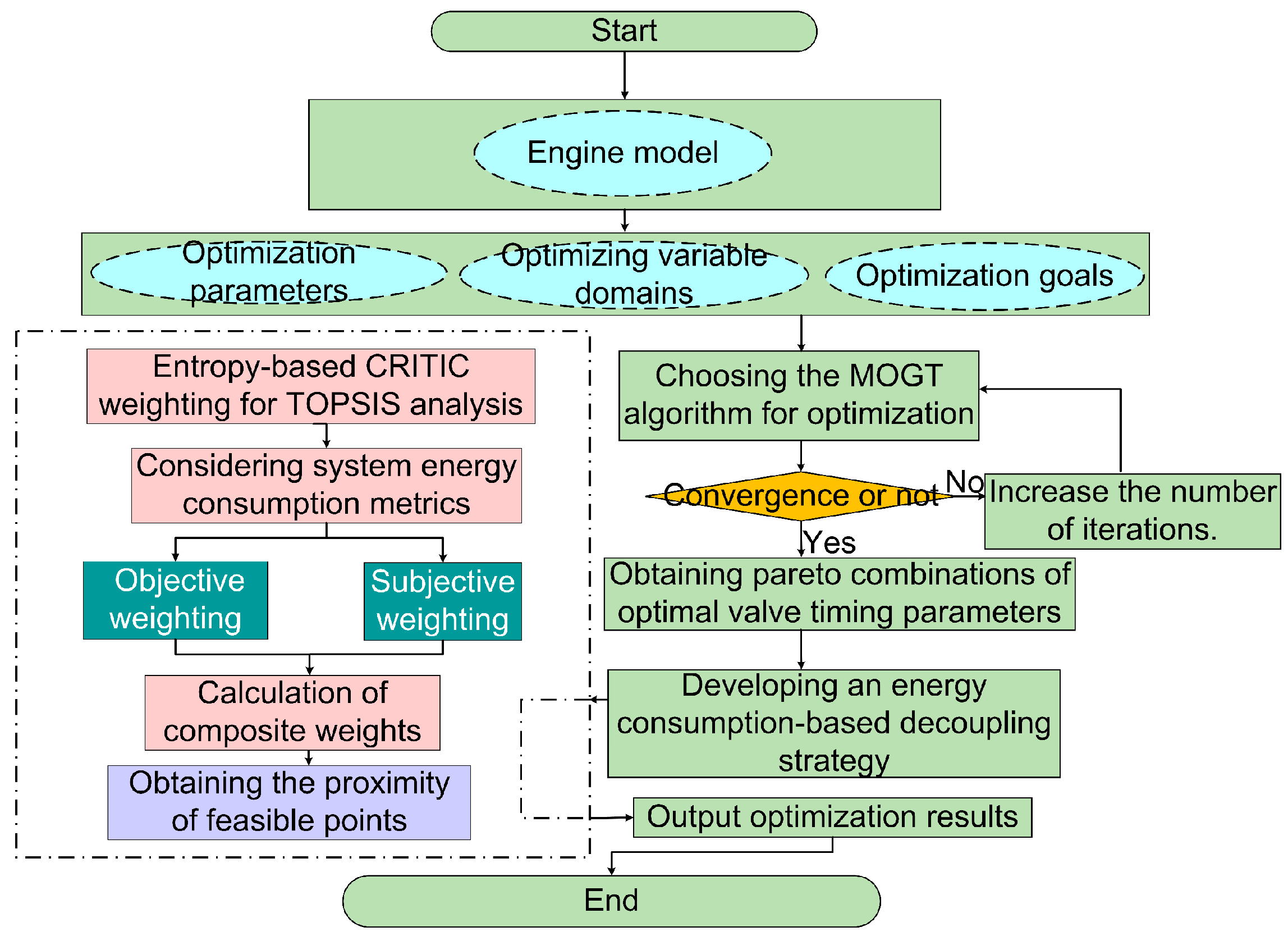
4.1. Establishment of the Optimization Model
4.2. TOPSIS Analysis Based on Entropy-Based CRITIC Synthetic Weighting
- 1.
- Construct the initial matrix.
- 2.
- Normalize the matrix.
- 3.
- The processed matrix is as follows:
- 4.
- Calculate the weights using the entropy method.
- 5.
- Calculate the CRITIC weights.
- 6.
- Calculation of objective weights.
- 7.
- Calculate the synthetic weights.
- 8.
- Construct the weighted decision matrix.
- 9.
- Determine the positive ideal solution (Z+) and the negative ideal solution (Z−) for each indicator:
- 10.
- Calculate the distance between each set of evaluation indicators and the positive ideal solution (Z+) and the negative ideal solution (Z−):
- 11.
- Finally, calculate the closeness coefficient (Ri) for each set of evaluation indicators to the ideal solutions:
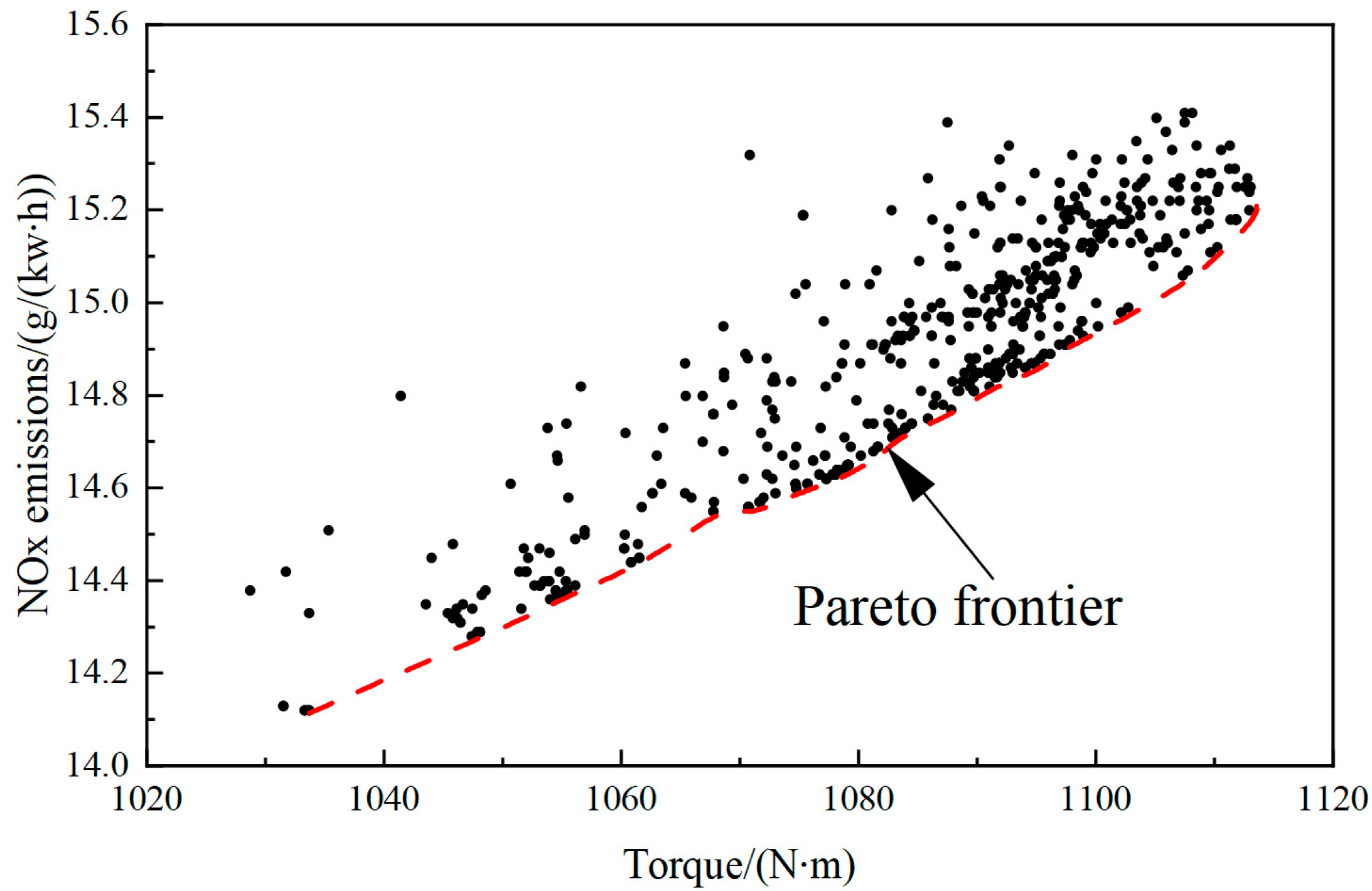
4.3. Analysis of Optimization Results
5. Conclusions
- (1)
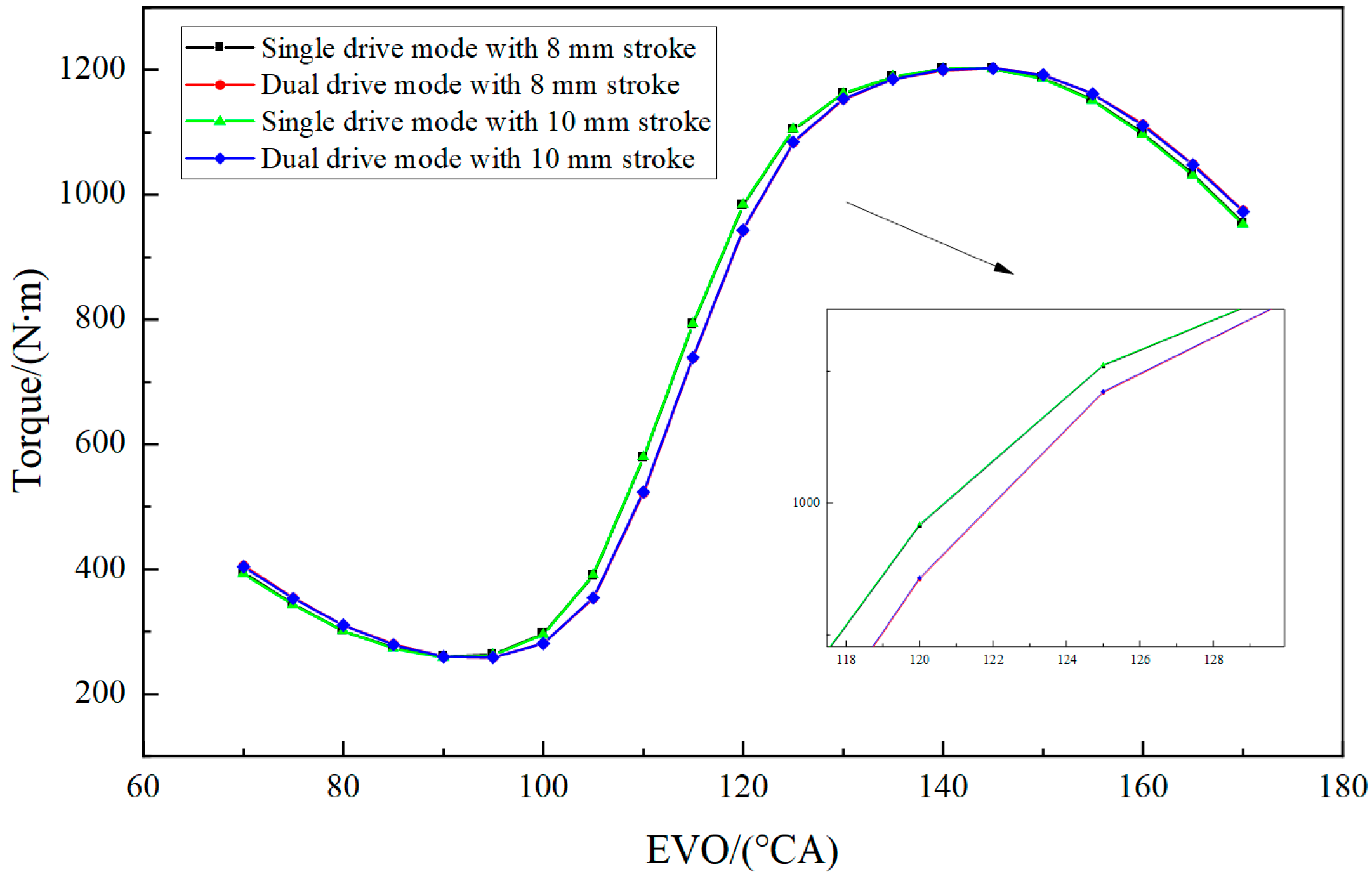
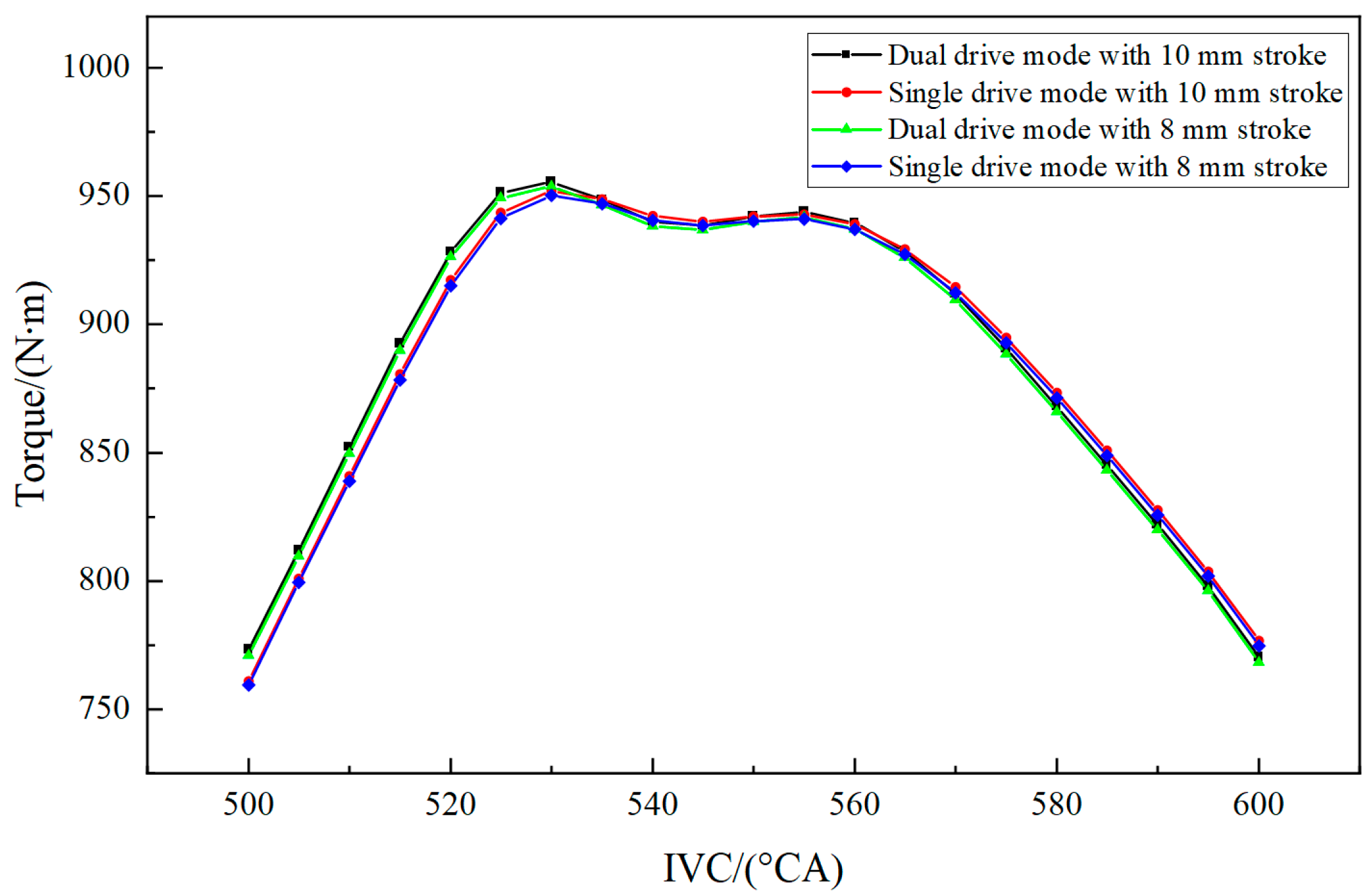
- The fast response characteristics of the electromagnetic valve result in a delayed optimal exhaust opening timing and an earlier intake closing timing. While a larger valve lift (10 mm) does not lead to significant improvements in engine performance, it can increase the energy consumption of the valve mechanism. This is a key factor that needs to be considered during the optimization design of valve timing parameters.
- (2)
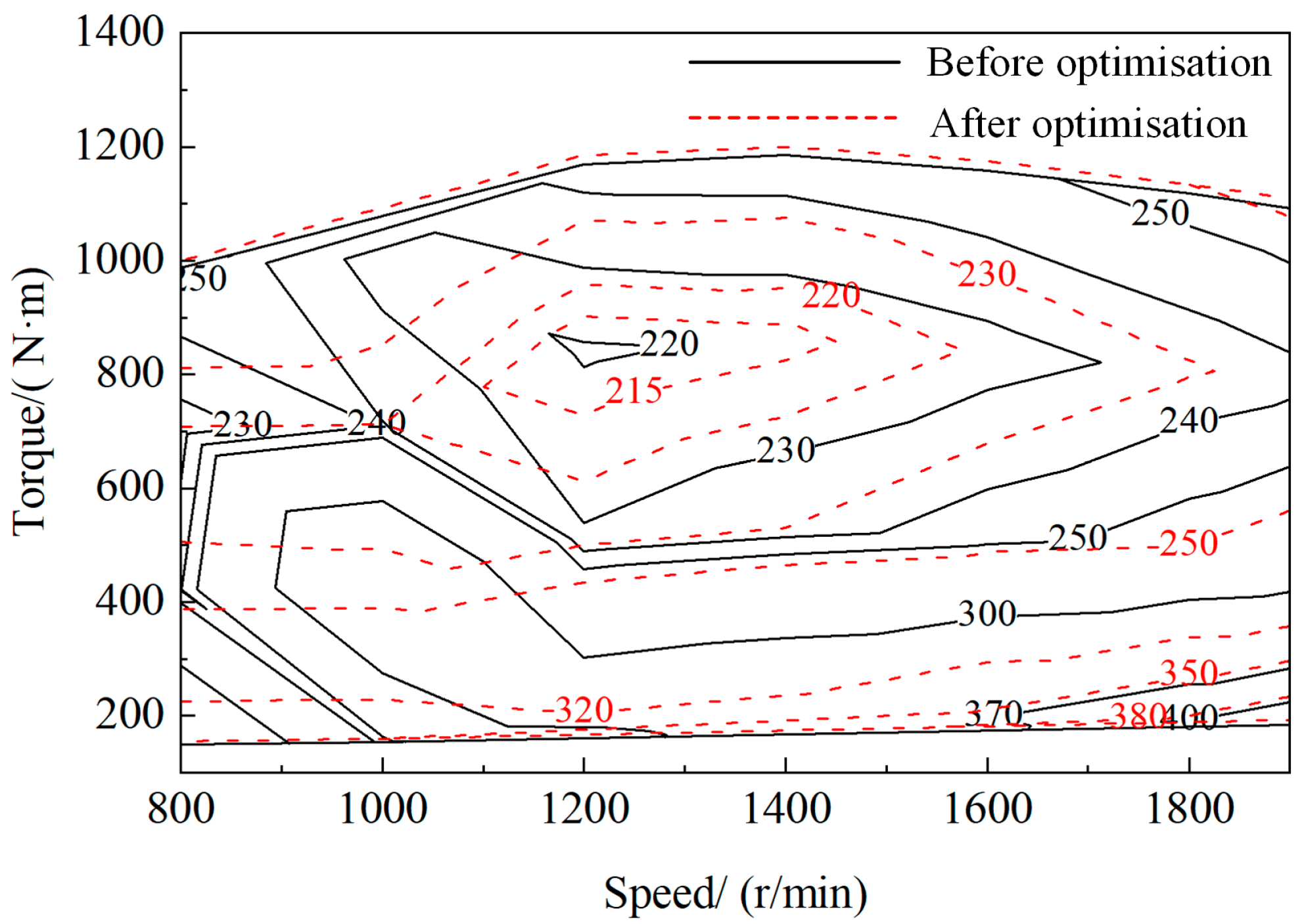
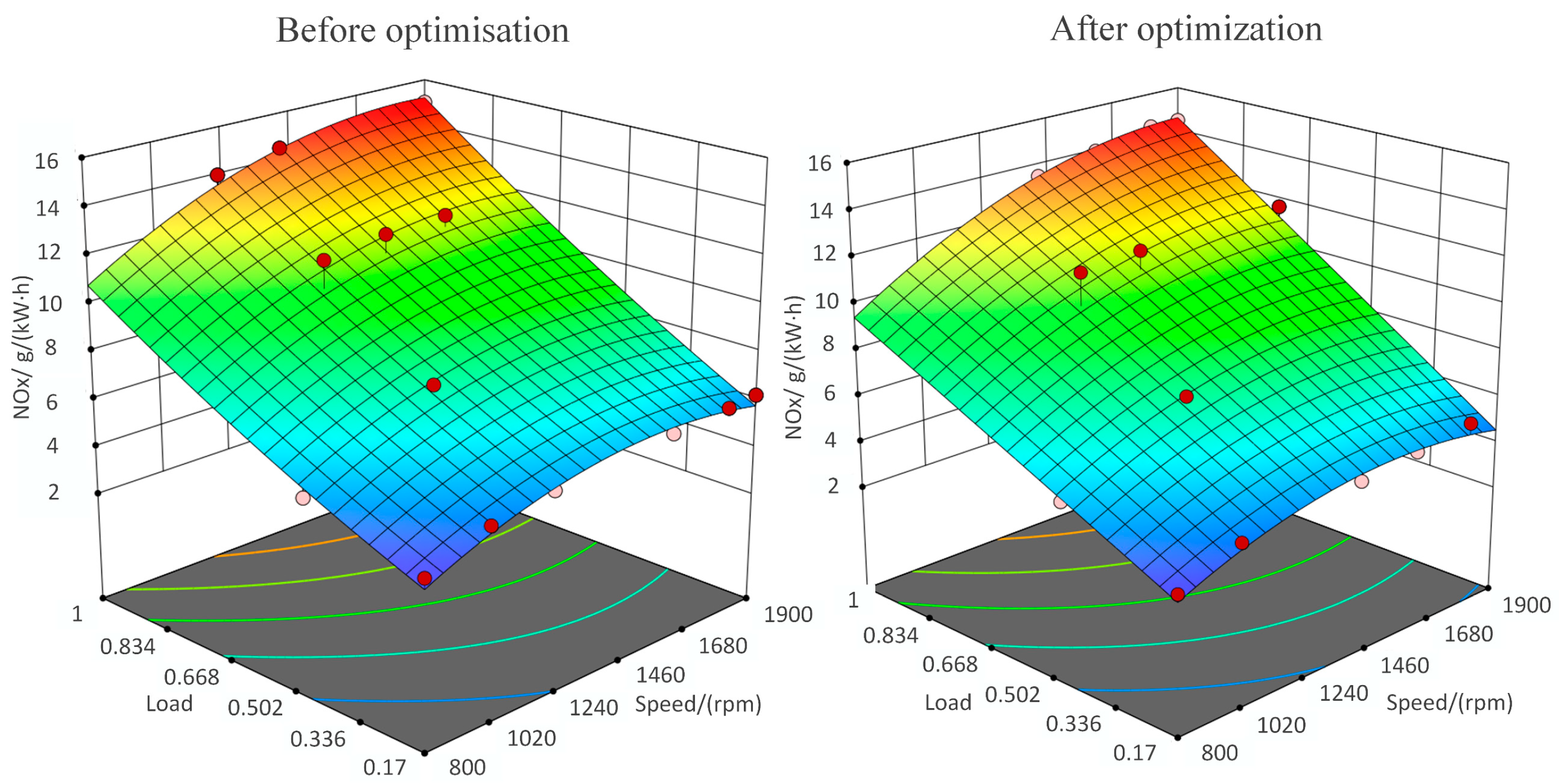
- The use of a multi-objective game theory optimization algorithm for valve timing parameter optimization offers higher computational efficiency and accuracy. The results indicated an average torque increase of 2.56% across all operating conditions, a 6.23% reduction in effective fuel consumption, and a 9.86% decrease in nitrogen oxide emissions.
- (3)
- By incorporating the energy consumption and drive efficiency of the valve mechanism as decision factors, a valve timing control strategy was developed using the distance analysis method based on entropy-based synthetic weighting. This approach enabled the generation of an optimal valve operation mode MAP, effectively enhancing the drive efficiency of the composite electromagnetic valve mechanism while ensuring optimal engine performance.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ICE | Internal combustion engine |
| MOGT | Multi-objective game theory |
| CRITIC | Criteria Importance Though Intercriteria Correlation |
| TOPSIS | Technique for Order Preference by Similarity to an Ideal Solution |
| EVO | Exhaust Valve Opening |
| BSFC | Brake-specific fuel consumption |
| IVC | Intake Valve Closing |
| EVC | Exhaust Valve Closing |
| TVO | Intake Valve Opening |
| CA | Crank angle |
References
- Fang, S.; Zhang, R.; Maltsev, S.; Chen, D.; Fan, X.; Levtsev, A. A novel adaptive fast sliding mode control method based on fuzzy algorithm for the air management system of fuel cell stack. Process Saf. Environ. Prot. 2024, 187, 506–517. [Google Scholar] [CrossRef]
- Hu, D.; Gao, P.; Cheng, Z.; Shen, Y.; He, R.; Yi, F.; Lu, M.; Wang, J.; Liu, S. Comprehensive review of hydrogen leakage in relation to fuel cell vehicles and hydrogen refueling stations: Status, challenges, and future prospects. Energy Fuels 2024, 38, 4803–4835. [Google Scholar] [CrossRef]
- Li, Y.; Ru, X.; Yang, M.; Zheng, Y.; Yin, S.; Hong, C.; Peng, F.; Qu, M.; Xue, C.; Lu, J.; et al. Flexible silicon solar cells with high power-to-weight ratios. Nature 2024, 626, 105–110. [Google Scholar] [CrossRef] [PubMed]
- Toader, V.E.; Milici, L.D.; Ungureanu, C.; Bejenar, C.; Vasilica, O. Grosu Analysis of a Low-Speed Drive System Using Intelligent Materials. Actuators 2021, 11, 10. [Google Scholar] [CrossRef]
- Shan, B.; Ai, T.; Wang, K. Triboelectric Nanogenerator for Ocean Energy harvesting: A review of technological advances and future perspectives. Int. J. Electrochem. Sci. 2024, 19, 100694. [Google Scholar] [CrossRef]
- Ahn, S.; Neary, V.S. Investigation of mixed long-term nonstationary trends in global wave energy systems. J. Clean. Prod. 2024, 476, 143758. [Google Scholar] [CrossRef]
- Jiang, F.; Yuan, X.; Hu, L.; Xie, G.; Zhang, Z.; Li, X.; Hu, J.; Wang, C.; Wang, H. A comprehensive review of energy storage technology development and application for pure electric vehicles. J. Energy Storage 2024, 86, 111159. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, G.; Chen, M. A Fault-Tolerant Control Strategy for Distributed Drive Electric Vehicles Based on Model Reference Adaptive Control. Actuators 2024, 13, 486. [Google Scholar] [CrossRef]
- Lešnik, L.; Kegl, B.; Torres-Jiménez, E.; Crue-Peragón, F. Why we should invest further in the development of internal combustion engines for road applications. Oil Gas Sci. Technol. Rev. D’ifp Energ. Nouv. 2020, 75, 56. [Google Scholar] [CrossRef]
- Wu, B.; Shi, M.; Zi, Z.; Jin, S. Influence of cooling loss on the energy and exergy distribution of heavy-duty diesel engines based on two-stage variable supercharging, VVT, and EGR. Int. J. Engine Res. 2024, 25, 896–910. [Google Scholar] [CrossRef]
- Han, Z.; Hu, M.; Zhao, J.; Yu, W. Study on the influences of oil supply pressure and maximum opening of electromagnetic valve on upstream pressure fluctuation. Int. J. Engine Res. 2021, 22, 935–948. [Google Scholar] [CrossRef]
- Tripathy, S.; Das, A.; Sahu, B.; Srivastava, D.K. Electro-pneumatic variable valve actuation system for camless engine: Part I-development and characterization. Energy 2020, 193, 116740. [Google Scholar] [CrossRef]
- Fan, X.; Dai, J.; Lu, J.; Xu, H.; Tan, C. Kinetic behavior evaluation of electromagnetic valve train subject to exhaust gas force. Appl. Therm. Eng. 2020, 171, 115097. [Google Scholar] [CrossRef]
- Tan, C.; Chang, S.; Liu, L. Dynamic performance design and analysis of hybrid excited linear actuator for on-off valve. Int. J. Appl. Electromagn. Mech. 2017, 54, 199–209. [Google Scholar] [CrossRef]
- Tan, C.; Li, B.; Ge, W.; Sun, B. Design and analysis of a bi-stable linear force actuator for directly-driven metering pump. Smart Mater. Struct. 2018, 27, 107001. [Google Scholar] [CrossRef]
- Kuroda, J.; Majima, Y.; Ogawa, K.; Ikeda, K.; Kato, T.; Endo, A.; Narita, T.; Kato, H. Basic study on high precision positioning in electromagnetic valve drive system for improving internal combustion engine using linear actuator. Int. J. Appl. Electromagn. Mech. 2023, 71, S333–S341. [Google Scholar] [CrossRef]
- Xinyu, F.A.N.; Peng, W.A.N.G.; Jie, Y.I.N.; Yanbing, Z.H.U. Multi-mode Coordination Control of a Novel Compound Electromagnetic Linear Actuator. China Mech. Eng. 2023, 34, 292–299. [Google Scholar] [CrossRef]
- Jiang, K.; Zeng, H.; Wu, Z.; Sun, J.; Chen, C.; Han, B. Study on the Effect of Parameter Sensitivity on Engine Optimization Results. Energies 2023, 16, 7899. [Google Scholar] [CrossRef]
- Zhaohui, Z.; Lu, D.; You, T.; Xie, F. Research on Variable Displacement Valve Control Strategy Based on Electro-hydraulic Drive Intake and Exhaust Valve Opening and Closing Mode. Int. J. Automot. Technol. 2024, 25, 1445–1468. [Google Scholar] [CrossRef]
- Zhaohui, Z.; Hong, W.; You, T.; Su, Y.; Li, X.; Xie, F. Effect of Multi-Factor Coupling on the Movement Characteristics of the Hydraulic Variable Valve Actuation. Energies 2020, 13, 2870. [Google Scholar] [CrossRef]
- Zhang, E.; He, F.; Lu, Y.; Yang, X. Multi-body dynamics modeling and energy consumption optimization of electromagnetic mechanical fully variable valve system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2024, 238, 10952–10963. [Google Scholar] [CrossRef]
- Shao, D.; Sichuan, X.; Du, A. Research on a New Electromagnetic Valve Actuator Based on Voice Coil Motor for Automobile Engines; SAE Technical Paper 2017-01-1070; SAE: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Chang, S.; Liu, L.; Li, Z.; Xu, Z. Application of engine electromagnetic actuated valvetrain. J. Nanjing Univ. Sci. Technol. 2011, 35, 585–589. [Google Scholar] [CrossRef]
- Fan, X.; Zhu, Y. Collaborative optimization of multi-physical fields for composite electromagnetic linear actuators. Int. J. Appl. Electromagn. Mech. 2024, 76, 1–21. [Google Scholar] [CrossRef]
- Fan, X.; Xie, C.; Zhu, Z.; Li, Y. Loss analysis of a novel compound electromagnetic linear actuator under different operating modes and working conditions. Int. J. Appl. Electromagn. Mech. 2023, 72, 53–68. [Google Scholar] [CrossRef]
- Liu, Y.; Meng, J.; Li, T. Structural Optimization of a Giant Magnetostrictive Actuator Based on BP-NSGA-II Algorithm. Actuators 2024, 13, 293. [Google Scholar] [CrossRef]
- Knypiński, Ł.; Devarapalli, R.; Gillon, F. The hybrid algorithms in constrained optimization of the permanent magnet motors. IET Sci. Meas. Technol. 2024, 18, 613–619. [Google Scholar] [CrossRef]
- Yang, Z.; Guo, P.; Wang, L.; Hao, Q. Multi-objective optimization analysis of hydrogen internal combustion engine performance based on game theory. Appl. Energy 2024, 374, 123946. [Google Scholar] [CrossRef]
- Dosantos, P.S.; Bouchet, A.; Mariñas-Collado, I.; Montes, S. OPSBC: A method to sort Pareto-optimal sets of solutions in multi-objective problems. Expert Syst. Appl. 2024, 250, 123803. [Google Scholar] [CrossRef]
- Xu, C.; Ke, Y.; Li, Y.; Chu, H.; Wu, Y. Data-driven configuration optimization of an off-grid wind/PV/hydrogen system based on modified NSGA-II and CRITIC-TOPSIS. Energy Convers. Manag. 2020, 215, 112892. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Performance Indicators |
|---|---|
| Engine type | In-line, water-cooled, four-stroke |
| Number of cylinders | 6 |
| Displacement (L) | 12.419 |
| Valves per cylinder | 4 |
| Compression ratio (-) | 19:1 |
| Bore (mm) | 126 |
| Itinerary (mm) | 166 |
| Firing order | 1-5-3-6-2-4 |
| Rated speed (r/min) | 1900 |
| Whether to boost | Not |
| Feasible Points | Torque/(N∙m) | Energy Consumption of the Valve Mechanism/(kW) | NOx Emissions/(g/(kW∙h)) | Closeness Level (Ri) |
|---|---|---|---|---|
| 1 | 1113 | 3.94 (I10E10) | 15.2531 | 0.653 |
| 2 | 1110.19 | 3.94 (I10E10) | 15.1174 | 0.732 |
| 3 | 1107.71 | 3.94 (I10E10) | 15.0701 | 0.746 |
| 4 | 1104.83 | 3.00 (I10E8) | 15.0759 | 0.734 |
| 5 | 1101.45 | 2.85 (I8E8) | 15.1316 | 0.651 |
| 6 | 1098.87 | 3.94 (I10E10) | 14.9290 | 0.594 |
| 7 | 1097.42 | 3.00 (I10E8) | 14.9127 | 0.556 |
| 8 | 1096.82 | 3.00 (I10E8) | 14.9457 | 0.542 |
| 9 | 1094.78 | 3.79 (I8E10) | 14.8718 | 0.498 |
| 10 | 1090.98 | 2.85 (I8E8) | 14.8167 | 0.483 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Han, J.; Yin, J.; Zheng, L.; Shao, W. The Optimization Design of Variable Valve Parameters for Internal Combustion Engines Considering the Energy Consumption of a Composite Electromagnetic Valve Mechanism. Actuators 2025, 14, 168. https://doi.org/10.3390/act14040168
Fan X, Han J, Yin J, Zheng L, Shao W. The Optimization Design of Variable Valve Parameters for Internal Combustion Engines Considering the Energy Consumption of a Composite Electromagnetic Valve Mechanism. Actuators. 2025; 14(4):168. https://doi.org/10.3390/act14040168
Chicago/Turabian StyleFan, Xinyu, Juyi Han, Jie Yin, Li Zheng, and Wei Shao. 2025. "The Optimization Design of Variable Valve Parameters for Internal Combustion Engines Considering the Energy Consumption of a Composite Electromagnetic Valve Mechanism" Actuators 14, no. 4: 168. https://doi.org/10.3390/act14040168
APA StyleFan, X., Han, J., Yin, J., Zheng, L., & Shao, W. (2025). The Optimization Design of Variable Valve Parameters for Internal Combustion Engines Considering the Energy Consumption of a Composite Electromagnetic Valve Mechanism. Actuators, 14(4), 168. https://doi.org/10.3390/act14040168