
MPC-Based Speed Tracking Control for Subway Trains Under Actuator Constraints


Abstract
1. Introduction
2. Dynamical Model of Train
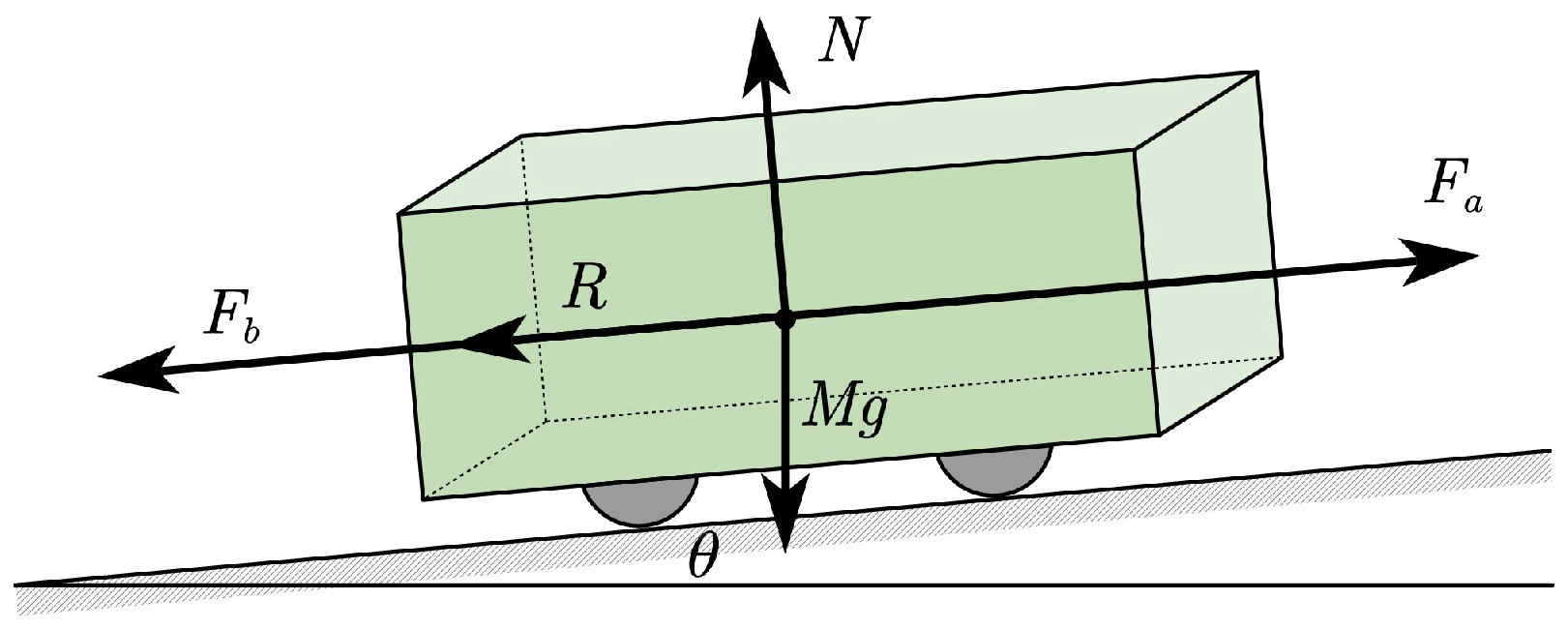
2.1. Train Force Analysis
2.2. Train Motion Model
2.3. Traction/Braking Force
2.4. Resistance Force
2.5. Dynamic Train Model
2.6. Linearization of Train Model
- Step 1. Choose the operating point , which is typically obtained by MPC computing the optimization problem at each time step.
- Step 2. Calculate the first-order Taylor expansion of with respect to x and u at the operating point :
- Step 3. Obtain the following linear state space function:
3. MPC-Based Speed Tracking Control
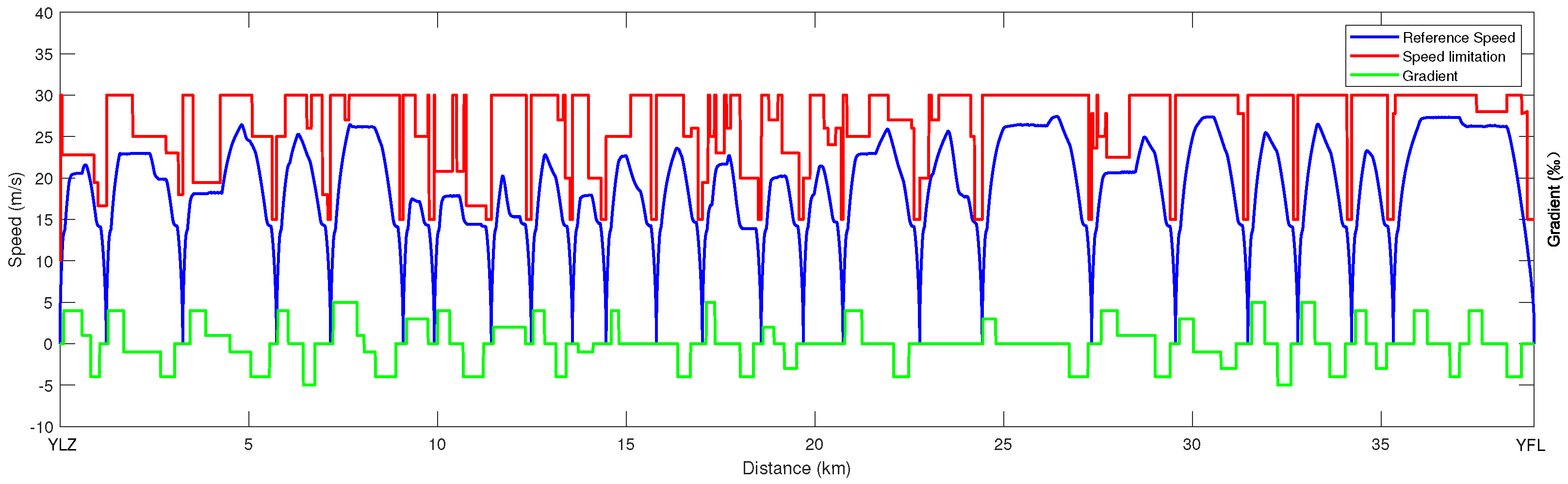
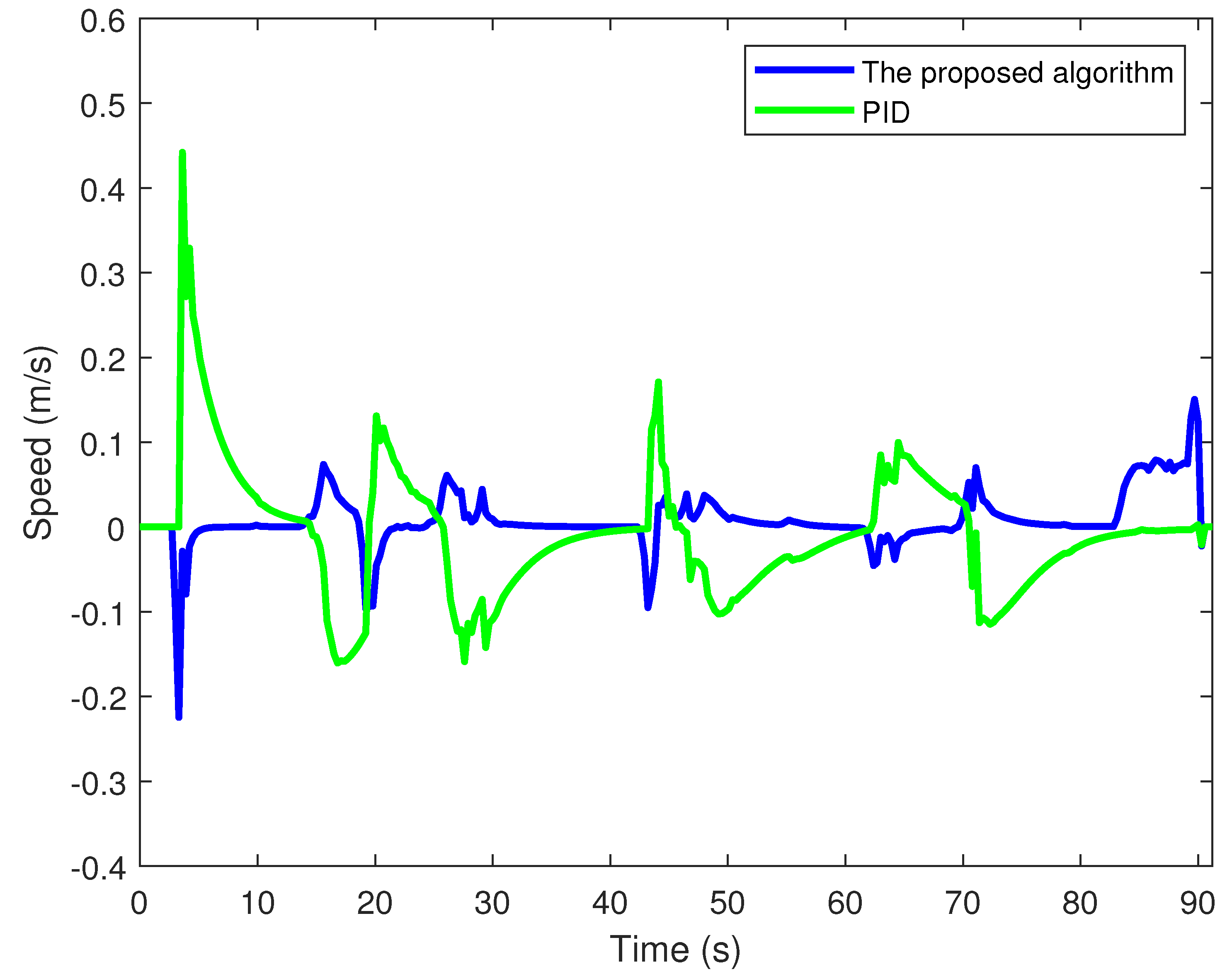
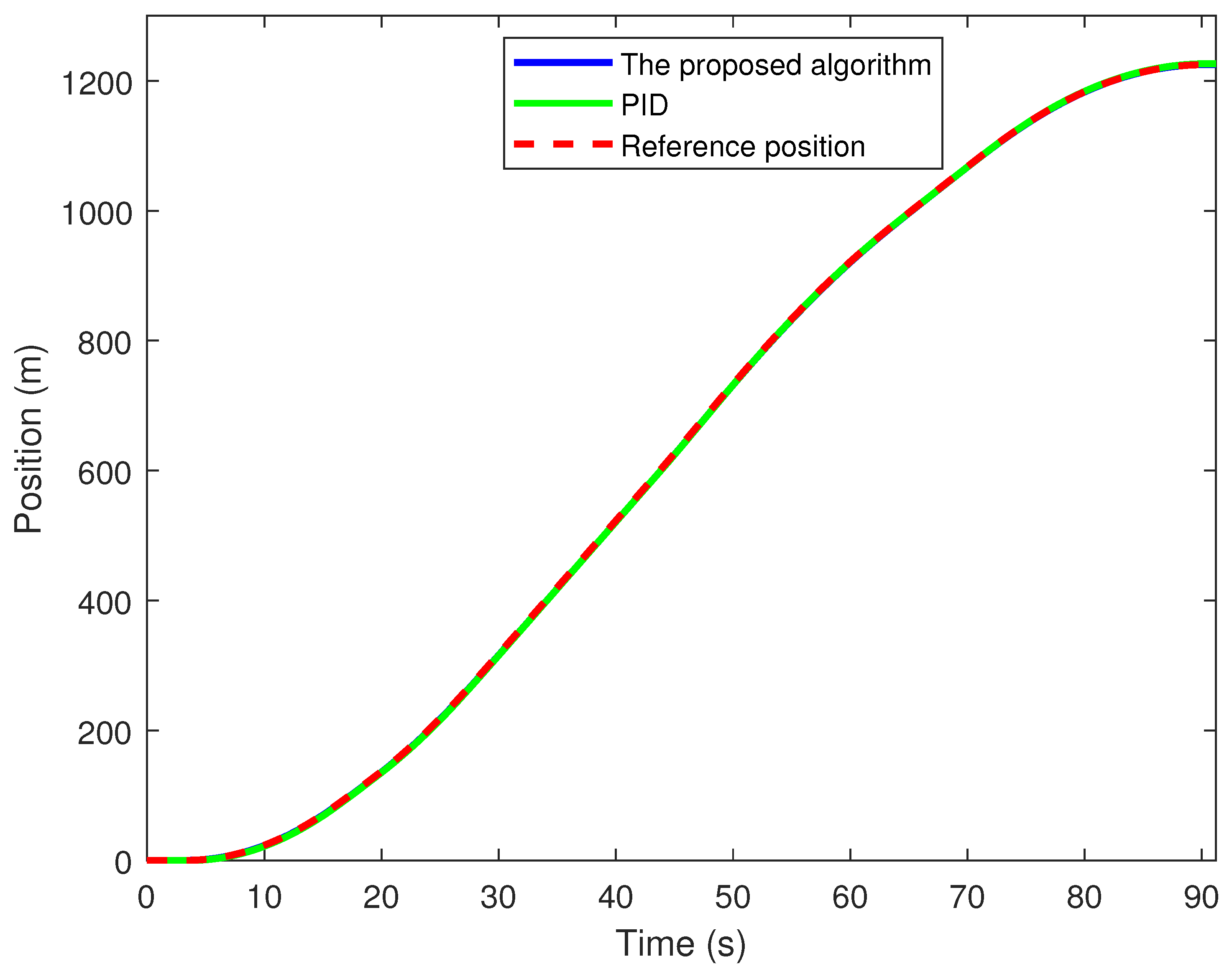
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yin, J.; Chen, D.; Li, L. Intelligent train operation algorithms for subway by expert system and reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2561–2571. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, R.; Dai, W.; Zhang, Z.; Li, J. Performance and safety assessment of ATO systems in urban rail transit systems in China. J. Transp. Eng. 2013, 139, 728–737. [Google Scholar] [CrossRef]
- Yin, J.; Tang, T.; Yang, L.; Xun, J.; Huang, Y.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. Part Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Hou, Z.; Dong, H.; Gao, S.; Nicholson, G.; Chen, L.; Roberts, C. Energy-saving metro train timetable rescheduling model considering ATO profiles and dynamic passenger flow. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2774–2785. [Google Scholar] [CrossRef]
- Liu, J.; Guo, H.; Yu, Y. Research on the cooperative train control strategy to reduce energy consumption. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1134–1142. [Google Scholar] [CrossRef]
- Han, P.; Xu, J.; Rong, L.; Wang, W.; Sun, Y.; Lin, G. Data-Driven Control Method Based on Koopman Operator for Suspension System of Maglev Train. Actuators 2024, 13, 397. [Google Scholar] [CrossRef]
- Wrat, G.; Ranjan, P.; Bhola, M.; Mishra, S.K.; Das, J. Position control and performance analysis of hydraulic system using two pump-controlling strategies. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 1093–1105. [Google Scholar] [CrossRef]
- Anh, A.T.H.T.; Tung, N.M. Speed control for traction motor of urban electrified train in field weakening region based on backstepping method. Bull. Electr. Eng. Inform. 2024, 13, 1504–1512. [Google Scholar] [CrossRef]
- Shi, R.; Shi, G. Robust control for TS fuzzy multi-particle model of high-speed train with disturbances and time-varying delays. Int. J. Control Autom. Syst. 2022, 20, 3063–3074. [Google Scholar] [CrossRef]
- Ji, J.; Jiang, P. Research on Predefined Time Sliding Mode Control Method for High-Speed Maglev Train Based on Finite Time Disturbance Observer. Actuators 2025, 14, 21. [Google Scholar] [CrossRef]
- Mao, Z.; Tao, G.; Jiang, B.; Yan, X.G. Adaptive control design and evaluation for multibody high-speed train dynamic models. IEEE Trans. Control Syst. Technol. 2020, 29, 1061–1074. [Google Scholar] [CrossRef]
- Pu, Q.; Zhu, X.; Zhang, R.; Liu, J.; Cai, D.; Fu, G. Speed profile tracking by an adaptive controller for subway train based on neural network and PID algorithm. IEEE Trans. Veh. Technol. 2020, 69, 10656–10667. [Google Scholar] [CrossRef]
- Yuan, H.; Huang, D.; Li, X. Adaptive speed tracking control for high speed trains under stochastic operation environments. Automatica 2023, 147, 110674. [Google Scholar] [CrossRef]
- Moaveni, B.; Rashidi Fathabadi, F.; Molavi, A. Fuzzy control system design for wheel slip prevention and tracking of desired speed profile in electric trains. Asian J. Control 2022, 24, 388–400. [Google Scholar] [CrossRef]
- Mao, Z.; Yan, X.G.; Jiang, B.; Chen, M. Adaptive fault-tolerant sliding-mode control for high-speed trains with actuator faults and uncertainties. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2449–2460. [Google Scholar] [CrossRef]
- Kang, Z.; Jia, L.M.; Zuo, X.L.; Shen, P.J.; Qin, Y.; Chai, Y.Y. A Novel Controller Based on Fuzzy Sliding Mode Control for Train Speed Tracking. IEEE Trans. Veh. Technol. 2024, 73, 7653–7668. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, S.; Hou, Z. Cooperative MFAILC for multiple subway trains with actuator faults and actuator saturation. IEEE Trans. Veh. Technol. 2022, 71, 8164–8174. [Google Scholar] [CrossRef]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on model predictive control: An engineering perspective. T Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Yao, Y.; Shekhar, D.K. State of the art review on model predictive control (MPC) in Heating Ventilation and Air-conditioning (HVAC) field. Build. Environ. 2021, 200, 107952. [Google Scholar] [CrossRef]
- Bakibillah, A.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J.i. Fuzzy-tuned model predictive control for dynamic eco-driving on hilly roads. Appl. Soft Comput. 2021, 99, 106875. [Google Scholar] [CrossRef]
- Uebel, S.; Murgovski, N.; Bäker, B.; Sjöberg, J. A two-level MPC for energy management including velocity control of hybrid electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5494–5505. [Google Scholar] [CrossRef]
- Bakibillah, A.; Kamal, M.A.S.; Imura, J.i.; Mukai, M.; Yamada, K. Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach. Actuators 2024, 13, 144. [Google Scholar] [CrossRef]
- Cao, Y.; Ma, L.; Zhang, Y. Application of fuzzy predictive control technology in automatic train operation. Clust. Comput. 2019, 22, 14135–14144. [Google Scholar] [CrossRef]
- Chen, B.; Huang, Z.; Zhang, R.; Liu, W.; Li, H.; Wang, J.; Fan, Y.; Peng, J. Data-driven Koopman model predictive control for optimal operation of high-speed trains. IEEE Access 2021, 9, 82233–82248. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Tang, T. Robust optimal predictive control of heavy haul train under imperfect communication. ISA Trans. 2019, 91, 52–65. [Google Scholar] [CrossRef]
- Wang, X.; Tang, T. Optimal operation of high-speed train based on fuzzy model predictive control. Adv. Mech. Eng. 2017, 9, 1687814017693192. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Z.; Liu, W.; Li, H.; Zhang, R.; Huang, Z. Optimal Operation of High-Speed Trains Using Hybrid Model Predictive Control. J. Adv. Transp. 2018, 2018, 7308058. [Google Scholar] [CrossRef]
- Xu, X.; Peng, J.; Zhang, R.; Chen, B.; Zhou, F.; Yang, Y.; Gao, K.; Huang, Z. Adaptive model predictive control for cruise control of high-speed trains with time-varying parameters. J. Adv. Transp. 2019, 2019, 7261726. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section No. | Running Section | Passenger Mass (kg) | Train Mass (t) |
|---|---|---|---|
| 1 | YLZ−XYJ | 10,340 | 223.24 |
| 2 | XYJ−DQH | 12,180 | 225.08 |
| 3 | DQH−CXL | 13,970 | 226.87 |
| 4 | CXL−FQD | 15,830 | 228.73 |
| 5 | FQD−BZD | 17,640 | 230.54 |
| 6 | BZD−SML | 19,450 | 232.35 |
| 7 | SML−BMC | 21,130 | 234.03 |
| 8 | BMC−MAD | 22,790 | 235.69 |
| 9 | MAD−XTL | 24,420 | 237.32 |
| 10 | XTLvFMG | 25,910 | 238.81 |
| 11 | FMG−TYG | 27,260 | 240.16 |
| 12 | TYG−SGL | 28,470 | 241.37 |
| 13 | SGL−WTD | 29,540 | 242.44 |
| 14 | WTD−DJY | 28,300 | 241.20 |
| 15 | DJY−HCB | 27,050 | 239.95 |
| 16 | HCB−KQN | 25,700 | 238.60 |
| 17 | KQN−NCL | 24,250 | 237.15 |
| 18 | NCL−BZX | 22,700 | 235.60 |
| 19 | BZX−JLD | 21,150 | 234.05 |
| 20 | JLD−ZHD | 19,500 | 232.40 |
| 21 | ZHD−JHL | 17,750 | 230.65 |
| 22 | JHL−GSZ | 16,000 | 228.90 |
| 23 | GSZ−MHD | 14,250 | 227.15 |
| 24 | MHD−YFL | 12,500 | 225.40 |
| Section No. | Running Section | Stopping Position Error (m) | Maximum Absolute Speed Error (m/s) | ||
|---|---|---|---|---|---|
| PID | MPC | PID | MPC | ||
| 1 | YLZ-XYJ | −1.4863 | 0 | 0.4020 | 0.2192 |
| 2 | XYJ-DQH | −0.7929 | 0.1153 | 0.4548 | 0.2266 |
| 3 | DQH-CXL | −0.8252 | 0.1175 | 0.4511 | 0.2261 |
| 4 | CXL-FQD | −3.6301 | 0.0097 | 0.4420 | 0.3563 |
| 5 | FQD-BZD | −0.8239 | 0.1157 | 0.4241 | 0.2192 |
| 6 | BZD-SML | 3.6905 | 0.4995 | 0.4480 | 0.2684 |
| 7 | SML-BMC | −0.9861 | 0.0195 | 0.4548 | 0.2465 |
| 8 | BMC-MAD | −0.7917 | 0.1135 | 0.4420 | 0.2193 |
| 9 | MAD-XTL | −0.8320 | 0.1181 | 0.4548 | 0.2162 |
| 10 | XTL-FMG | −0.7711 | 0.1798 | 0.4120 | 0.2222 |
| 11 | FMG-TYG | −0.1020 | 0.4986 | 0.4238 | 0.2681 |
| 12 | TYG-SGL | −0.8285 | 0.1155 | 0.4525 | 0.2192 |
| 13 | SGL-WTD | −0.8506 | 0.1195 | 0.4548 | 0.2116 |
| 14 | WTD-DJY | −0.8308 | 0.1164 | 0.4420 | 0.2198 |
| 15 | DJY-HCB | −6.9330 | 0.0033 | 0.4419 | 1.6757 |
| 16 | HCB-KQN | −0.8143 | 0.1169 | 0.4548 | 0.2250 |
| 17 | KQN-NCL | −0.5661 | 0.3662 | 0.4579 | 0.2266 |
| 18 | NCL-BZX | −0.8645 | 0.1201 | 0.4439 | 0.2230 |
| 19 | BZX-JLD | −3.3305 | 0.0062 | 0.4055 | 0.3548 |
| 20 | JLD-ZHD | −0.8305 | 0.1164 | 0.4481 | 0.2192 |
| 21 | ZHD-JHL | −0.8502 | 0.1180 | 0.4947 | 0.2632 |
| 22 | JHL-GSZ | −0.9589 | 0.0213 | 0.4043 | 0.2742 |
| 23 | GSZ-MHD | −0.8300 | 0.1163 | 0.4380 | 0.2173 |
| 24 | MHD-YFL | −1.5739 | 0.0012 | 0.4583 | 0.2642 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Yan, G.; Zhou, J.; Chen, B. MPC-Based Speed Tracking Control for Subway Trains Under Actuator Constraints. Actuators 2025, 14, 134. https://doi.org/10.3390/act14030134
Liu D, Yan G, Zhou J, Chen B. MPC-Based Speed Tracking Control for Subway Trains Under Actuator Constraints. Actuators. 2025; 14(3):134. https://doi.org/10.3390/act14030134
Chicago/Turabian StyleLiu, Dongdong, Guojun Yan, Jing Zhou, and Bo Chen. 2025. "MPC-Based Speed Tracking Control for Subway Trains Under Actuator Constraints" Actuators 14, no. 3: 134. https://doi.org/10.3390/act14030134
APA StyleLiu, D., Yan, G., Zhou, J., & Chen, B. (2025). MPC-Based Speed Tracking Control for Subway Trains Under Actuator Constraints. Actuators, 14(3), 134. https://doi.org/10.3390/act14030134