
An Extendable and Deflectable Modular Robot Inspired by Worm for Narrow Space Exploration


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Robot Design and Method
3. Materials and Methods
3.1. Overview of Shape Memory Alloy Spring
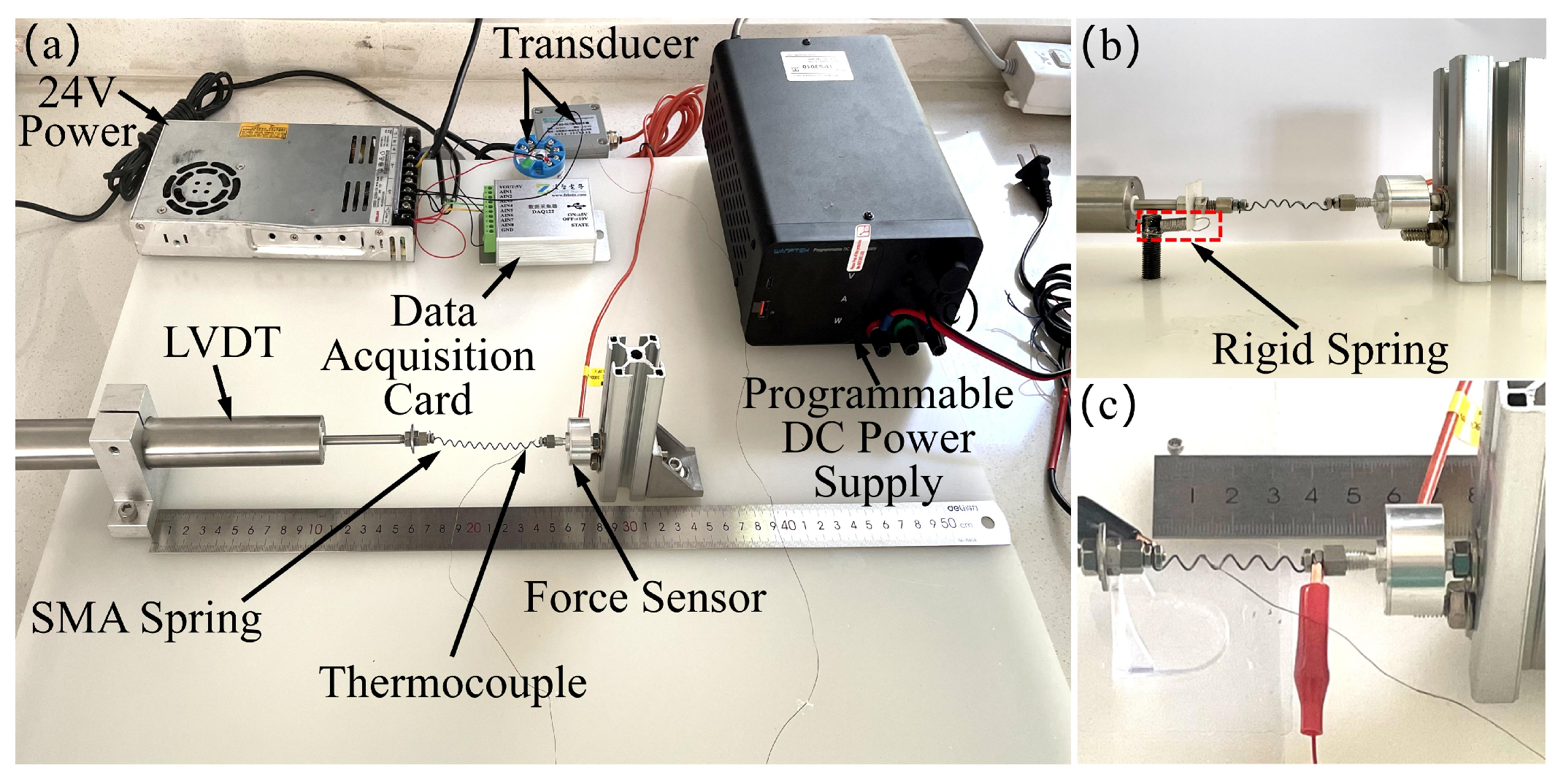
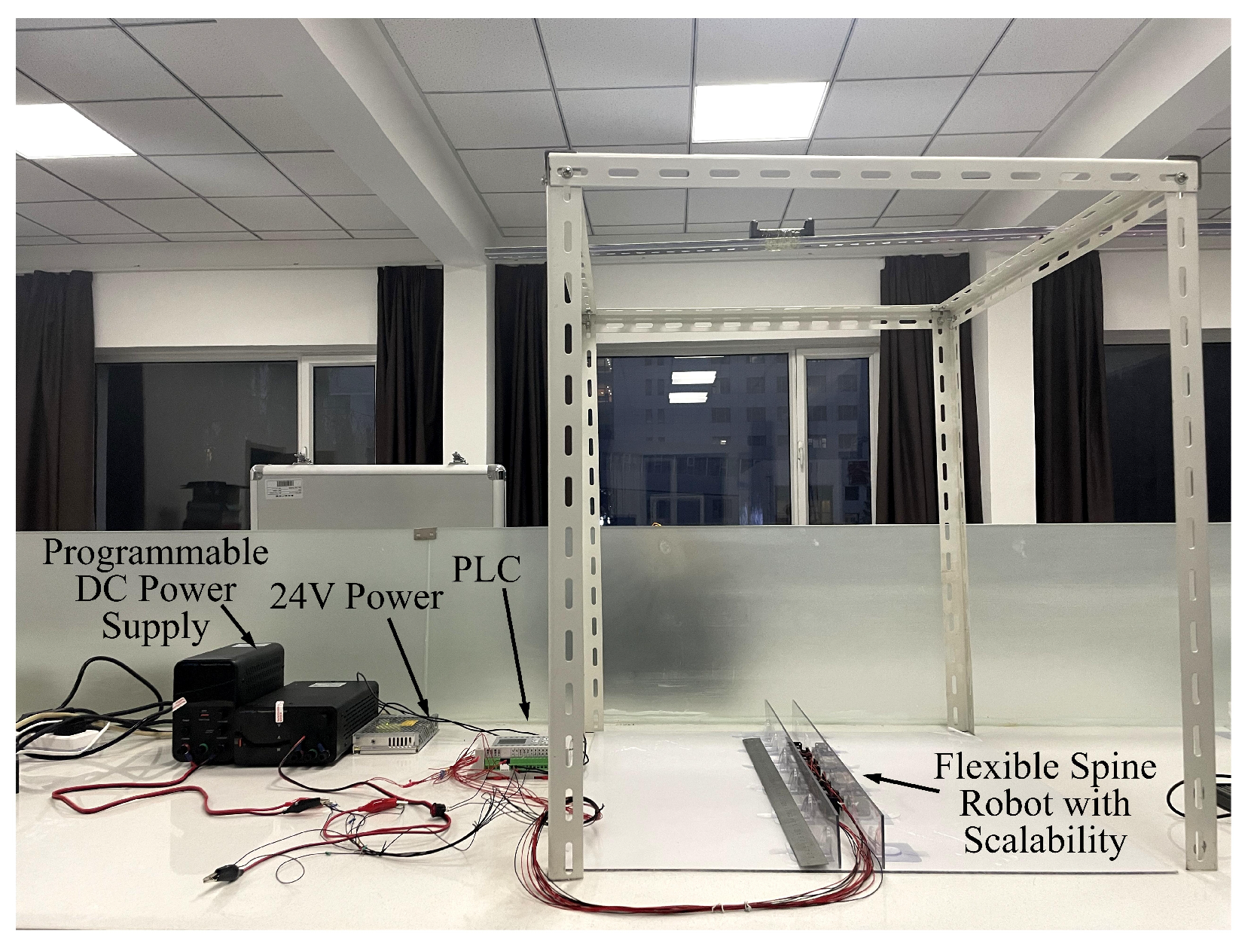
3.2. Experimental Devices and Procedures
3.3. Electrical-Thermal-Mechanical Characteristics
4. Kinematics and Mechanics Characteristics
5. Experimental Verification
5.1. Motion Experiment
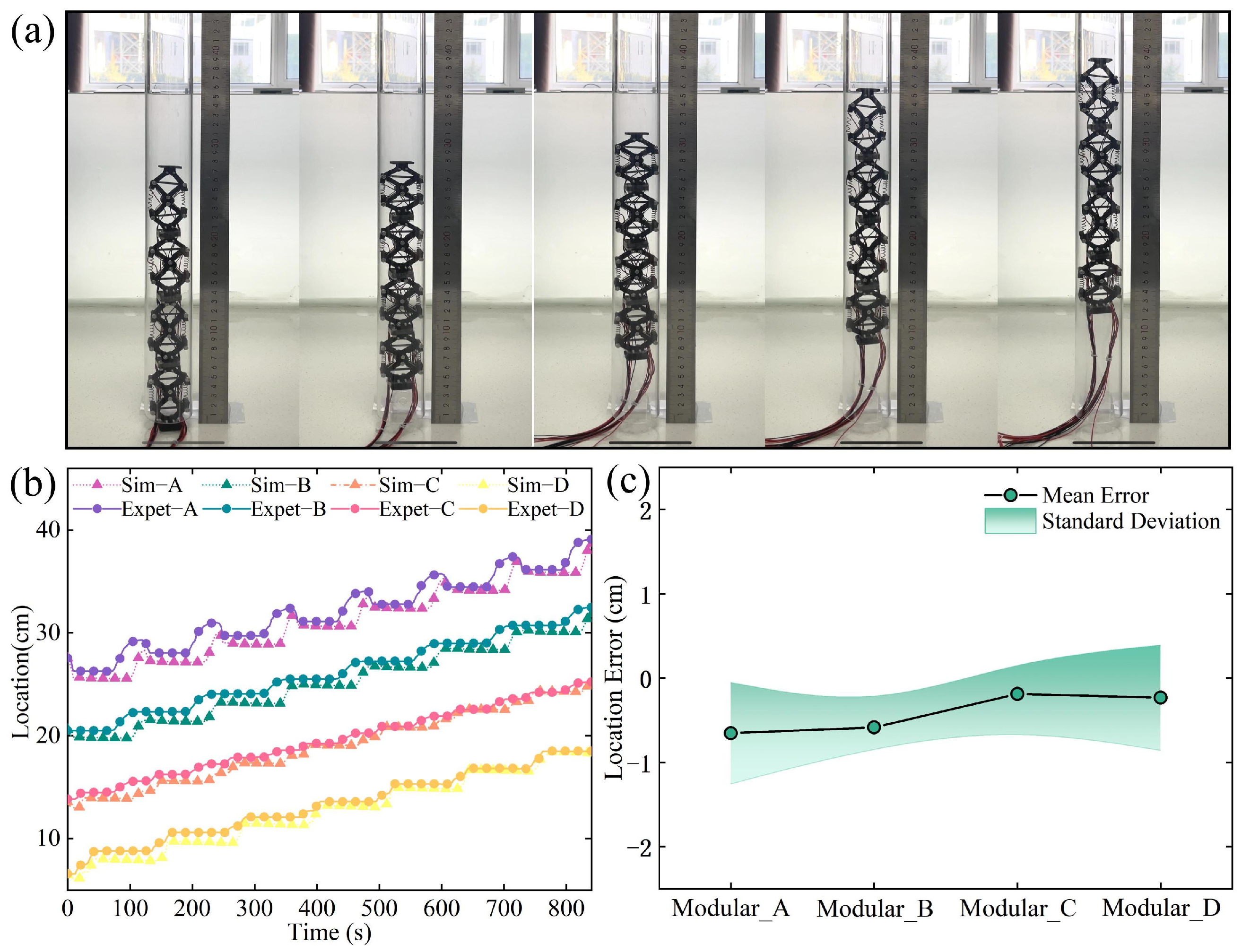
5.2. Expansion, Contraction and Deflection Experiments
5.3. Experiment of Climbing Motion in a Pipe
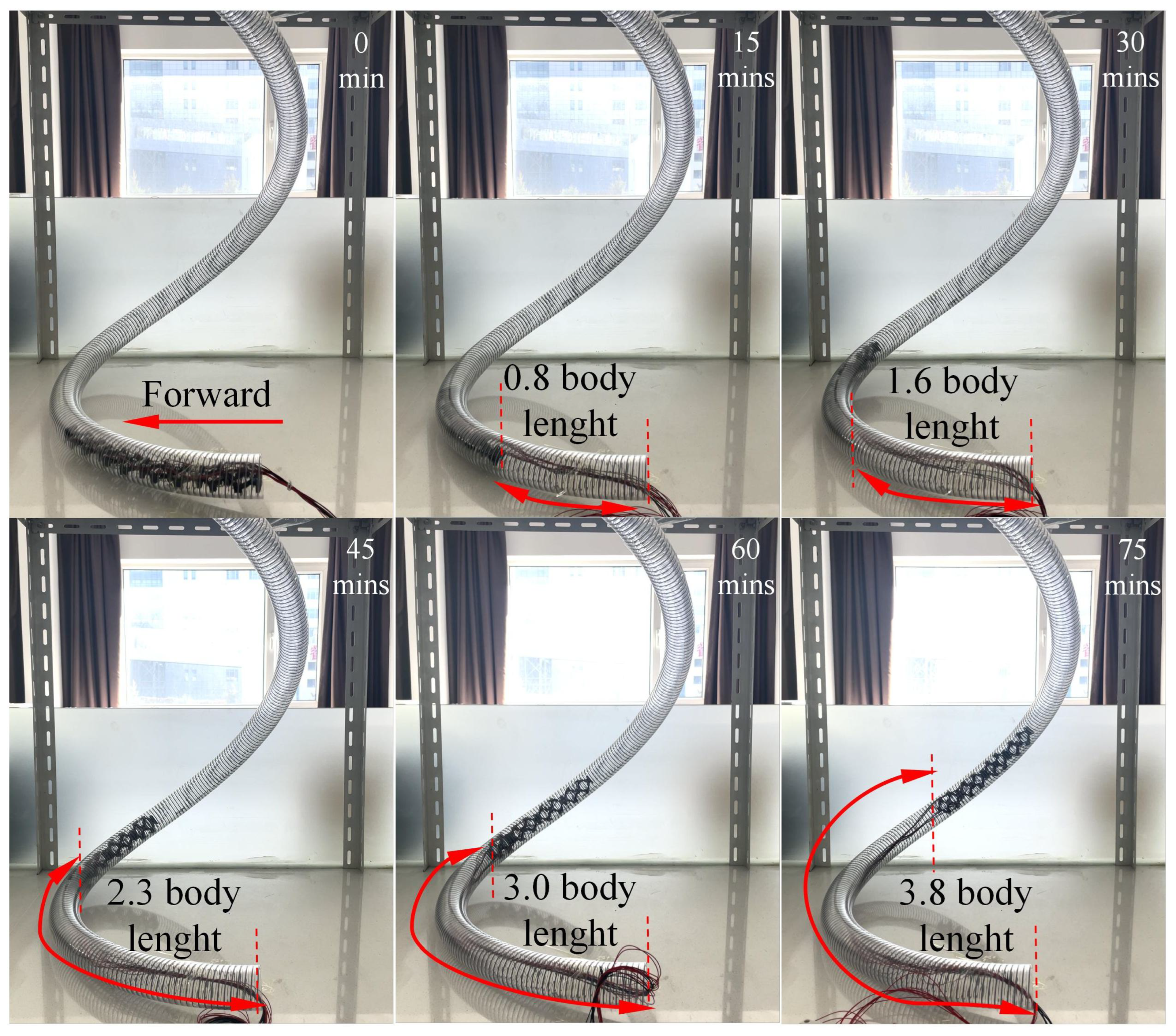
5.4. Experiment of Climbing Motion in a Winding Pipe
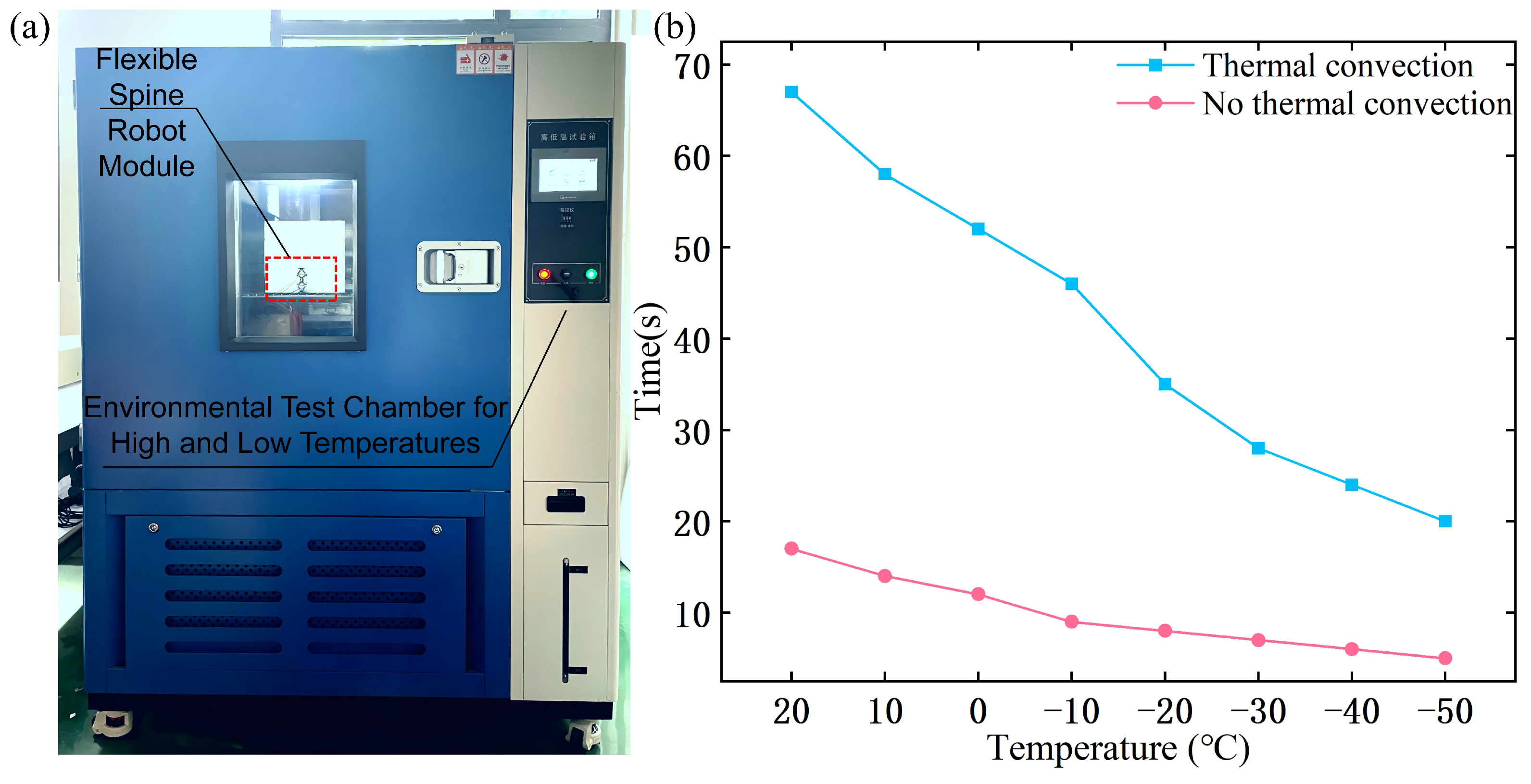
5.5. Experiment of Expansion and Contraction in Extreme Cold Environments
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, F.; Cao, J.; Zhang, H.; Wang, M.Y.; Zhu, J.; Zhang, Y.F. Programmable deformations of networked inflated dielectric elastomer actuators. IEEE/ASME Trans. Mechatron. 2018, 24, 45–55. [Google Scholar] [CrossRef]
- Wang, H.; Ni, H.; Wang, J.; Chen, W. Hybrid Vision/Force Control of Soft Robot Based on a Deformation Model. IEEE Trans. Control Syst. Technol. 2021, 29, 661–671. [Google Scholar] [CrossRef]
- Liu, Y.X.; Wang, L.; Gu, Z.Z.; Quan, Q.Q.; Deng, J. Development of a Two-Dimensional Linear Piezoelectric Stepping Platform Using Longitudinal-Bending Hybrid Actuators. IEEE Trans. Ind. Electron. 2019, 66, 3030–3040. [Google Scholar] [CrossRef]
- Zhang, J.S.; Chen, H.L. Voltage-induced beating vibration of a dielectric elastomer membrane. Nonlinear Dyn. 2020, 100, 2225–2239. [Google Scholar] [CrossRef]
- Sun, X.T.; Wang, F.; Xu, J. A novel dynamic stabilization and vibration isolation structure inspired by the role of avian neck. Int. J. Mech. Sci. 2021, 193, 1059–1066. [Google Scholar] [CrossRef]
- Bauer, S.; Bauer-Gogonea, S.; Graz, I.; Kaltenbrunner, M.; Keplinger, C.; Schwodiauer, R. 25th anniversary article: A soft future: From robots and sensor skin to energy harvesters. Adv. Mater. 2014, 26, 149–161. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Trimmer, B.A.; Lin, H.T.; Baryshyan, A.; Leisk, G.G.; Kaplan, D.L. Towards a biomorphic soft robot: Design constraints and solutions. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 599–605. [Google Scholar]
- Peng, Y.; Nabae, H.; Funabora, Y.; Suzumori, K. Controlling a peristaltic robot inspired by inchworms. Biomim. Intell. Robot. 2024, 4, 100146. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Wang, W.; Lee, J.Y.; Rodrigue, H.; Song, S.H.; Chu, W.S.; Ahn, S.H. Locomotion of inchworm-inspired robot made of smart soft composite (SSC). Bioinspir. Biomim. 2014, 9, 046006. [Google Scholar] [CrossRef]
- Rodriguez-Arco, L.; Poma, A.; Ruiz-Perez, L.; Scarpa, E.; Ngamkham, K.; Battaglia, G. Molecular bionics–engineering biomaterials at the molecular level using biological principles. Biomaterials 2019, 192, 26–50. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, S.K.; Yadav, V.G. Bionic Manufacturing: Towards Cyborg Cells and Sentient Microbots. Trends Biotechnol. 2018, 36, 483–487. [Google Scholar] [CrossRef]
- Manoonpong, P.; Parlitz, U.; Worgotter, F. Neural control and adaptive neural forward models for insect-like, energy-efficient, and adaptable locomotion of walking machines. Front. Neural Circuits 2013, 7, 12. [Google Scholar] [CrossRef] [PubMed]
- Full, R.J. Invertebrate Locomotor Systems. Compr. Physiol. 2011, 12, 853–930. [Google Scholar]
- Peng, Y.; Nabae, H.; Funabora, Y.; Suzumori, K. Peristaltic transporting device inspired by large intestine structure. Sens. Actuators A Phys. 2024, 365, 114840. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Haomachai, W.; Shao, D.H.; Wang, W.; Ji, A.H.; Dai, Z.D.; Manoonpong, P. Lateral Undulation of the Bendable Body of a Gecko-Inspired Robot for Energy-Efficient Inclined Surface Climbing. IEEE Robot. Autom. Lett. 2021, 6, 7918–7925. [Google Scholar] [CrossRef]
- Qiu, J.; Ji, A.; Zhu, K.; Han, Q.; Wang, W.; Qi, Q.; Chen, G. A Gecko-Inspired Robot with a Flexible Spine Driven by Shape Memory Alloy Springs. Soft Robot. 2023, 10, 713–723. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Liu, Z.; Hu, Z.; Dai, K. Lateral undulation of the flexible spine of sprawling posture vertebrates. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 2018, 204, 707–719. [Google Scholar] [CrossRef] [PubMed]
- Consumi, V.; Lindenroth, L.; Merlin, J.; Stoyanov, D.; Stilli, A. Design and Evaluation of the SoftSCREEN Capsule for Colonoscopy. IEEE Robot. Autom. Lett. 2023, 8, 1659–1666. [Google Scholar] [CrossRef]
- Omori, H.; Nakamura, T.; Yada, T. An underground explorer robot based on peristaltic crawling of earthworms. Ind. Robot. 2009, 36, 358–364. [Google Scholar] [CrossRef]
- Tanaka, T.; Harigaya, K.; Nakamura, T. Development of a peristaltic crawling robot for long-distance inspection of sewer pipes. IEEE/ASME Trans. Adv. Intell. Mechatron. 2014, 19, 1552–1557. [Google Scholar]
- Dewapura, J.I.; Hemachandra, P.S.; Dananjaya, T.; Awantha, W.V.; Wanasinghe, A.T.; Kulasekera, A.L.; Chathuranga, D.S.; Dassanayake, V.P. Design and development of a novel bio-inspired worm-type soft robot for in-pipe locomotion. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2020; Volume 586, pp. 586–591. [Google Scholar]
- Yu, W.; Li, X.; Chen, D.; Liu, J.; Su, J.; Liu, J.; Cao, C.; Yuan, H. A minimally designed soft crawling robot for robust locomotion in unstructured pipes. Bioinspir. Biomim. 2022, 17, 5. [Google Scholar] [CrossRef] [PubMed]
- Arena, P.; Patané, L.; Spinosa, A.G. A nullcline-based control strategy for PWL-shaped oscillators. Nonlinear Dyn. 2019, 97, 1011–1033. [Google Scholar] [CrossRef]
- Liu, J.; Li, P.; Zuo, S. Actuation and design innovations in earthworm-inspired soft robots: A review. Front. Bioeng. Biotechnol. 2023, 11, 1088105. [Google Scholar] [CrossRef]
- Whitesides, G.M. Soft robotics. Angew. Chem. Int. Ed. Engl. 2018, 57, 4258–4273. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, J.; Holmes, P. Mechanical models for insect locomotion: Active muscles and energy losses. Biol. Cybern. 2003, 89, 43–55. [Google Scholar] [CrossRef]
- Wang, D.; Liu, Y.; Deng, J.; Zhang, S.; Li, J.; Wang, W.; Liu, J.; Chen, W.; Quan, Q.; Liu, G.; et al. Miniature amphibious robot actuated by rigid-flexible hybrid vibration modules. Adv. Sci. 2022, 9, e2203054. [Google Scholar] [CrossRef]
- Sanku, N.; Yudong, L.; Yantao, S.; Jin, K.K. Enabling earthworm-like soft robot development using bioinspired IPMC-scissor lift actuation structures: Design, locomotion simulation and experimental validation. Robot. Biomim. 2015, 499, 499–504. [Google Scholar]
- Fang, H.; Zhang, U.; Wang, K.W. An earthworm-like robot using origami-ball structures. Proc. SPIE 2017, 10164, 10164. [Google Scholar]
- Luo, Y.; Zhao, N.; Shen, Y.; Li, P. A rigid morphing mechanism enabled earthworm-like crawling robot. J. Mech. Robot. 2023, 15, 1. [Google Scholar] [CrossRef]
- Appiah, C.; Arndt, C.; Siemsen, K.; Heitmann, A.; Staubitz, A.; Selhuber-Unkel, C. Living materials herald a new era in soft robotics. Adv. Mater. 2019, 31, e1807747. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Kumar, K.; Jawed, M.K.; Nasab, A.M.; Ye, Z.; Shan, W.; Majidi, C. Chasing biomimetic locomotion speeds: Creating untethered soft robots with shape memory alloy actuators. Sci. Robot. 2018, 3, 25. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.S.; Heo, J.K.; Rodrigue, H.; Lee, H.T.; Pané, S.; Han, M.W.; Ahn, S.H. Shape memory alloy (SMA) actuators: The role of material, form, and scaling effects. Adv. Mater. 2023, 35, e2208517. [Google Scholar] [CrossRef] [PubMed]
- Park, S.J.; Kim, U.; Park, C.H. A novel fabric muscle based on shape memory alloy springs. Soft Robot. 2020, 7, 321–331. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Fang, H.; Xu, J. Yoshimura-origami based earthworm-like robot with 3-dimensional locomotion capability. Front. Robot. AI 2021, 8, 738214. [Google Scholar] [CrossRef] [PubMed]
- Bae, J.; Kim, M.; Song, B.; Yang, J.; Kim, D.; Jin, M.; Yun, D. Review of the latest research on snake robots focusing on the structure, motion and control method. Int. J. Control Autom. Syst. 2022, 20, 3393–3409. [Google Scholar] [CrossRef]
- Liu, J.; Tong, Y.; Liu, J. Review of snake robots in constrained environments. Robot. Auton. Syst. 2021, 141, 103785. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, S.; Yao, J.; Yu, Y.; Zhao, G. An Extendable and Deflectable Modular Robot Inspired by Worm for Narrow Space Exploration. Actuators 2025, 14, 94. https://doi.org/10.3390/act14020094
Tang S, Yao J, Yu Y, Zhao G. An Extendable and Deflectable Modular Robot Inspired by Worm for Narrow Space Exploration. Actuators. 2025; 14(2):94. https://doi.org/10.3390/act14020094
Chicago/Turabian StyleTang, Shufeng, Jianan Yao, Yue Yu, and Guoqing Zhao. 2025. "An Extendable and Deflectable Modular Robot Inspired by Worm for Narrow Space Exploration" Actuators 14, no. 2: 94. https://doi.org/10.3390/act14020094
APA StyleTang, S., Yao, J., Yu, Y., & Zhao, G. (2025). An Extendable and Deflectable Modular Robot Inspired by Worm for Narrow Space Exploration. Actuators, 14(2), 94. https://doi.org/10.3390/act14020094