
Integrating Strain Gauge Feedback with Adaptive Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage


 ,
,
Abstract
1. Introduction
2. Structural Analysis
3. Dynamics Modeling
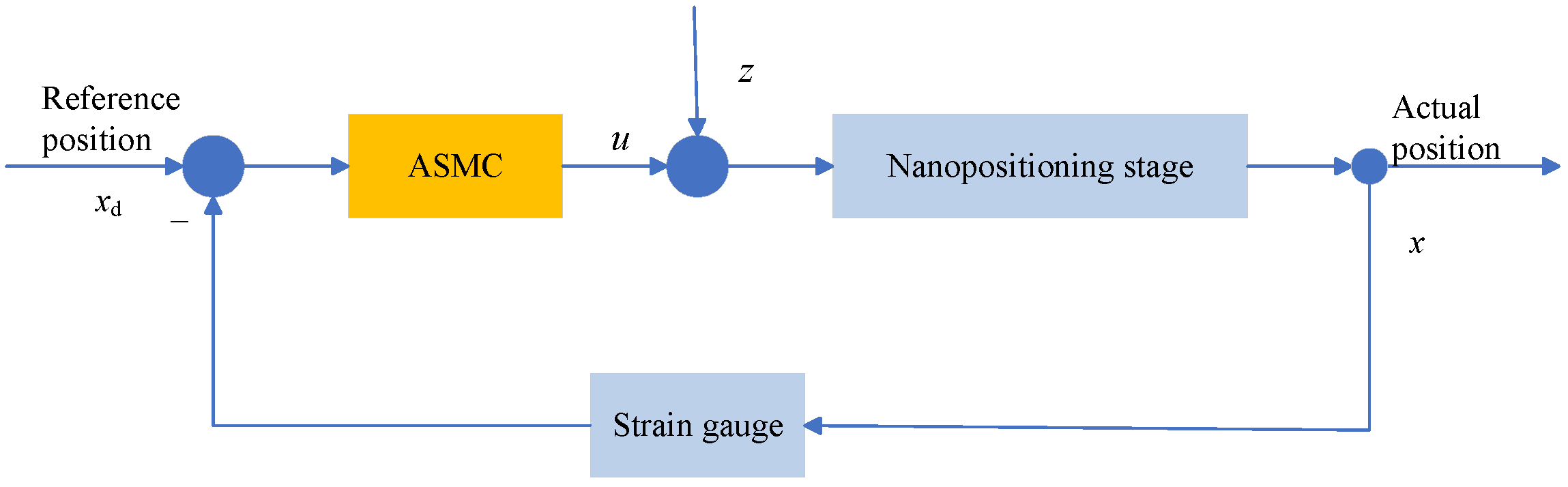
4. Sliding Mode Controller Design
5. Experimental Setup
5.1. Experimental Equipment
5.2. System Identification
5.3. Controller Setup
6. Results and Discussion
6.1. Parameter Calibration Results
6.2. Resolution Test for Nanopositioning Movement
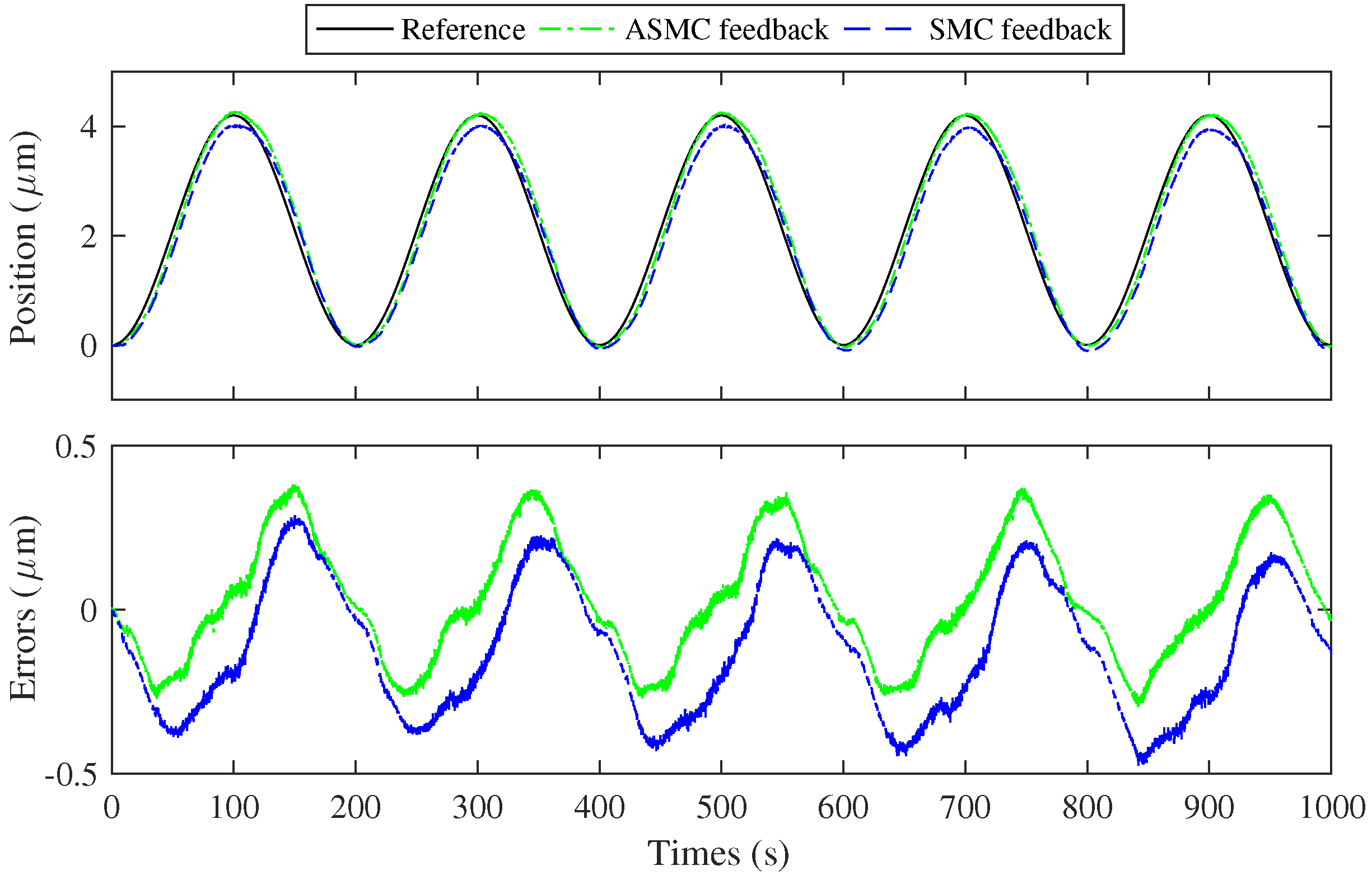
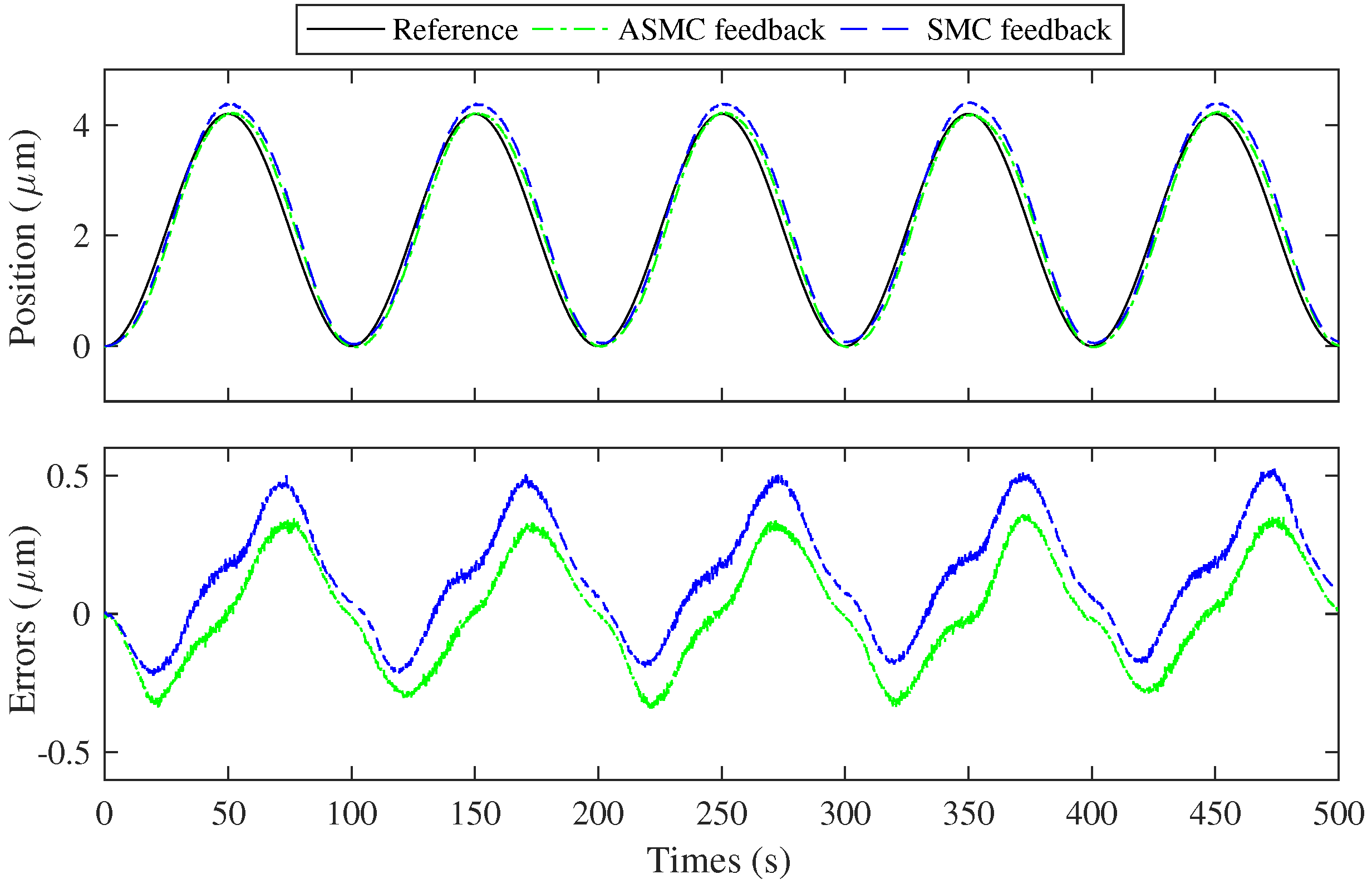
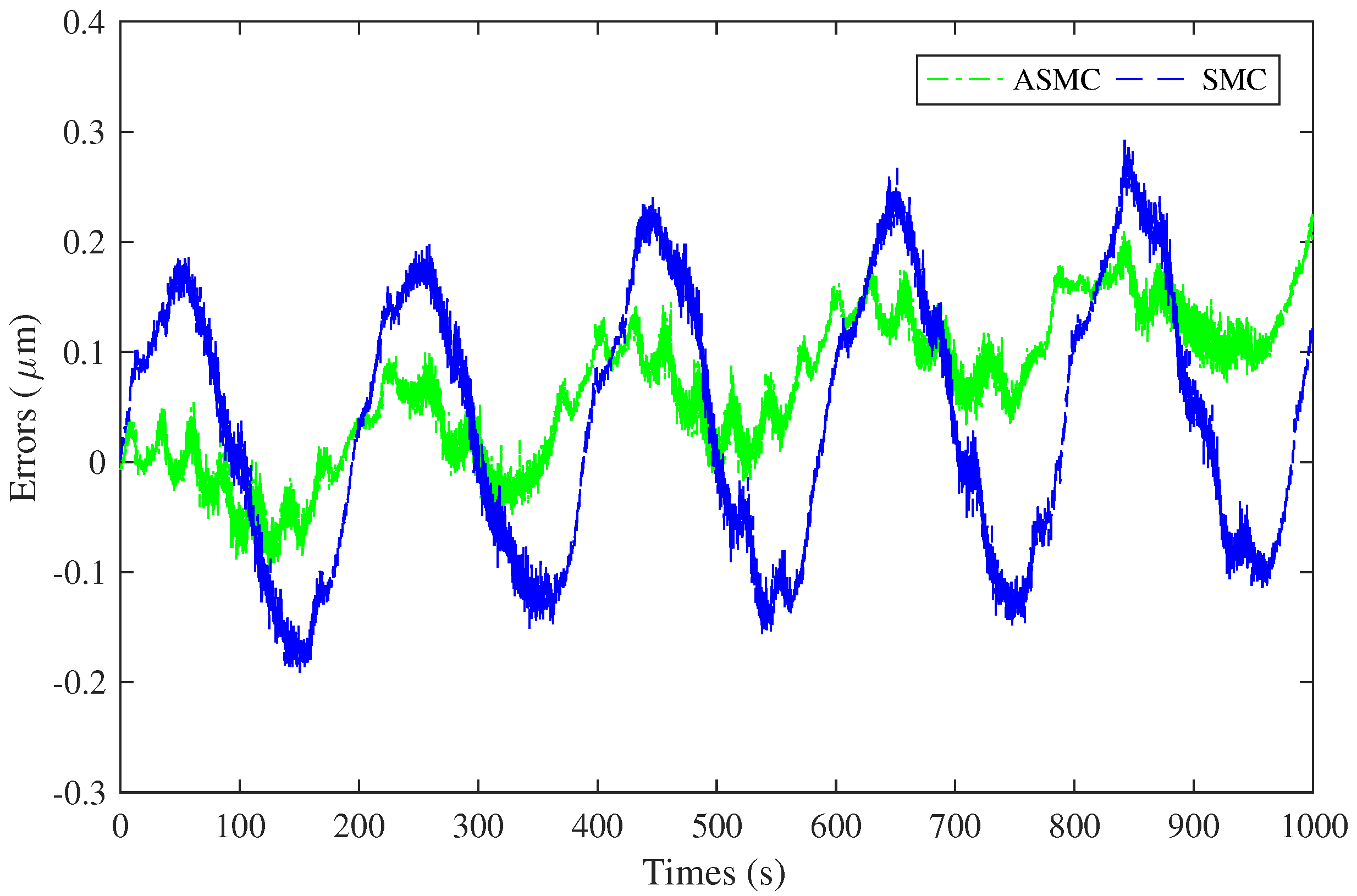
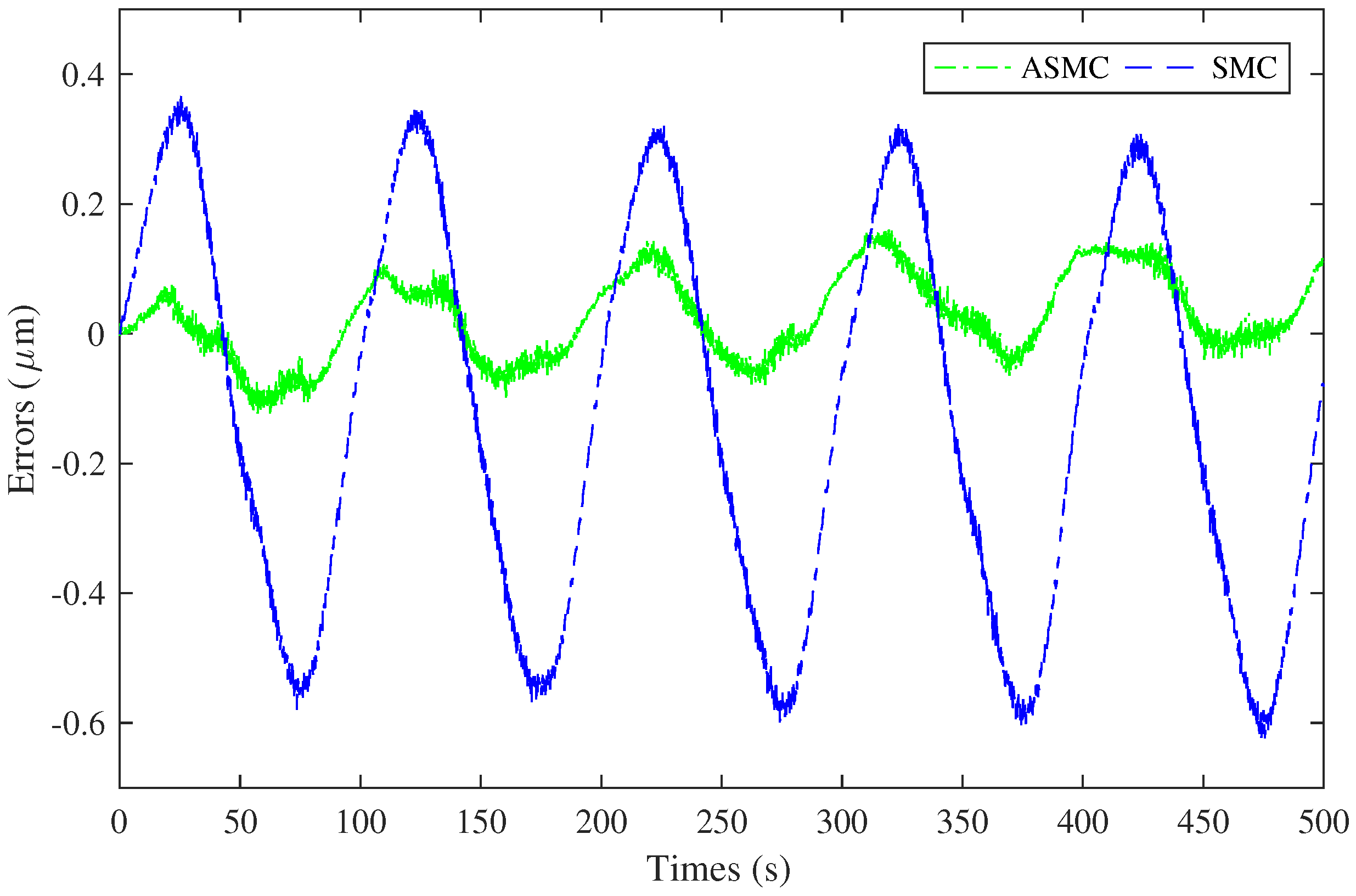
6.3. Tracking Error Testing Results
- (1)
- System response time: Inherent delays in the system’s response to reference changes may lead to phase lag and subsequently increase errors. The communication time between the data acquisition card, motion control card, and the computer contributes to the system’s temporal delay.
- (2)
- Sensor limitations: The resolution and temporal responsiveness of sensors that ascertain the system’s feedback position is limited by the performance of the sensors. These limitations can lead to an imprecise representation of the system’s position.
- (3)
- Structural influences: Minimal variations in the structure during motion can impact the precision of strain gauge-based feedback displacement measurements. These minor fluctuations cause deviations in the strain gauge’s readings, although seemingly insignificant. As a result, the accuracy of the feedback signal is compromised.
- (4)
- Calibration inaccuracies: In the calibration process, it is commonly assumed that the system response is linear. However, the actual system are characterized by hysteresis. The deviation between the linearized calibration model and the nonlinearity system response consequently compromises the precision of the tracking performance.
6.4. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, D.; Nagel, W.S.; Clayton, G.M.; Leang, K.K. Spatial-Temporal Trajectory Redesign for Dual-Stage Nanopositioning Systems With Application in AFM. IEEE/ASME Trans. Mechatron. 2020, 25, 558–569. [Google Scholar] [CrossRef]
- Li, L.; Li, C.X.; Gu, G.; Zhu, L. Modified Repetitive Control Based Cross-Coupling Compensation Approach for the Piezoelectric Tube Scanner of Atomic Force Microscopes. IEEE/ASME Trans. Mechatron. 2019, 24, 666–676. [Google Scholar] [CrossRef]
- Prabhu, P.; Rao, M. Investigations on piezo actuated micro XY stage for vibration-assisted micro milling. J. Micromech. Microeng. 2021, 31, 065007. [Google Scholar] [CrossRef]
- Zhao, D.; Zhu, Z.; Huang, P.; Guo, P.; Zhu, L.; Zhu, Z. Development of a piezoelectrically actuated dual-stage fast tool servo. Mech. Syst. Signal Process. 2020, 144, 106873. [Google Scholar] [CrossRef]
- Chang, Q.; Liu, Y.; Deng, J.; Zhang, S.; Chen, W. Design of a precise linear-rotary positioning stage for optical focusing based on the stick-slip mechanism. Mech. Syst. Signal Process. 2022, 165, 108398. [Google Scholar] [CrossRef]
- Makarem, S.; Delibas, B.; Koc, B. Data-Driven Tuning of PID Controlled Piezoelectric Ultrasonic Motor. Actuators 2021, 10, 148. [Google Scholar] [CrossRef]
- Fang, J.; Zhang, L.; Long, Z.; Wang, M.Y. Fuzzy Adaptive Sliding Mode Control for the Precision Position of Piezo-Actuated Nano Positioning Stage. Int. J. Precis. Eng. Manuf. 2018, 19, 1447–1456. [Google Scholar] [CrossRef]
- Kong, L.; Li, D.; Zou, J.; He, W. Neural Networks Based Learning Control for a Piezoelectric Nanopositioning System. IEEE/ASME Trans. Mechatron. 2020, 25, 2904–2914. [Google Scholar] [CrossRef]
- Baziyad, A.G.; Ahmad, I.; Bin Salamah, Y. Precision Motion Control of a Piezoelectric Actuator via a Modified Preisach Hysteresis Model and Two-Degree-of-Freedom H-Infinity Robust Control. Micromachines 2023, 14, 1208. [Google Scholar] [CrossRef]
- Ni, L.; Chen, J.; Chen, G.; Zhao, D.; Wang, G.; Aphale, S.S. An explainable neural network integrating Jiles-Atherton and nonlinear auto-regressive exogenous models for modeling universal hysteresis. Eng. Appl. Artif. Intell. 2024, 136, 108904. [Google Scholar] [CrossRef]
- Zhu, W.L.; Zhu, Z.; Guo, P.; Ju, B.F. A novel hybrid actuation mechanism based XY nanopositioning stage with totally decoupled kinematics. Mech. Syst. Signal Process. 2018, 99, 747–759. [Google Scholar] [CrossRef]
- Xi, X.; Clancy, T.; Wu, X.; Sun, Y.; Liu, X. A MEMS XY-stage integrating compliant mechanism for nanopositioning at sub-nanometer resolution. J. Micromech. Microeng. 2016, 26, 025014. [Google Scholar] [CrossRef]
- Sun, W.; Lin, X.; Huang, L.; Mu, D.; Zhang, H. Distributed sliding mode control for reactive power sharing in an islanded microgrid. Electr. Power Syst. Res. 2024, 231, 110342. [Google Scholar] [CrossRef]
- Li, Z.; Li, L.; Zhang, J.; Feng, W. System modeling and sliding mode control of fast steering mirror for space laser communication. Mech. Syst. Signal Process. 2024, 211, 111206. [Google Scholar] [CrossRef]
- Wang, G.; Wang, B.; Zhang, C. Fixed-Time Third-Order Super-Twisting-like Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage. Mathematics 2021, 9, 1770. [Google Scholar] [CrossRef]
- Medina, L.; Guerra, G.; Herrera, M.; Guevara, L.; Camacho, O. Trajectory tracking for non-holonomic mobile robots: A comparison of sliding mode control approaches. Results Eng. 2024, 22, 102105. [Google Scholar] [CrossRef]
- Khodaverdian, M.; Hajshirmohamadi, S.; Hakobyan, A.; Ijaz, S. Predictor-based constrained fixed-time sliding mode control of multi-UAV formation flight. Aerosp. Sci. Technol. 2024, 148, 109113. [Google Scholar] [CrossRef]
- Chang, Y.; Wang, A.; Yan, H.; Zhai, G.; Huang, W. Adaptive complementary sliding mode control of ship course under environmental disturbance. Ocean Eng. 2024, 312, 119016. [Google Scholar] [CrossRef]
- Qu, C.; Cheng, L.; Gong, S.; Huang, X. Dynamic-matching adaptive sliding mode control for hypersonic vehicles. Aerosp. Sci. Technol. 2024, 149, 109159. [Google Scholar] [CrossRef]
- Chen, L.; Ding, S.; Zhao, J.; Gao, J.; Chen, H. Temperature regulation for liquid-cooled fuel cell based on adaptive sliding mode control. Int. J. Hydrogen Energy 2024, 68, 1097–1107. [Google Scholar] [CrossRef]
- Guo, X.; Wang, H.; Liu, H. Adaptive sliding mode control with disturbance estimation for hydraulic actuator systems and application to rock drilling jumbo. Appl. Math. Model. 2024, 136, 115637. [Google Scholar] [CrossRef]
- Li, J.; Zhao, Z.; Qin, X. Adaptive sliding mode control using a novel fully feedback recurrent neural network for quad-rotor UAVs. Neurocomputing 2024, 610, 128592. [Google Scholar] [CrossRef]
- Chen, L.; Wu, Z.; Xu, Q. Novel Adaptive Global Observer-Based Sliding Mode Control of a 2-DOF Piezoelectric Nanopositioning System. IEEE Trans. Autom. Sci. Eng. 2024, 1–14. [Google Scholar] [CrossRef]
- Chen, X.; Hisayama, T. Adaptive Sliding-Mode Position Control for Piezo-Actuated Stage. IEEE Trans. Ind. Electron. 2008, 55, 3927–3934. [Google Scholar] [CrossRef]
- Ming, M.; Liang, W.; Feng, Z.; Ling, J.; Al Mamun, A.; Xiao, X. PID-type sliding mode-based adaptive motion control of a 2-DOF piezoelectric ultrasonic motor driven stage. Mechatronics 2021, 76, 102543. [Google Scholar] [CrossRef]
- Xu, Q. Precision Motion Control of Piezoelectric Nanopositioning Stage With Chattering-Free Adaptive Sliding Mode Control. IEEE Trans. Autom. Sci. Eng. 2017, 14, 238–248. [Google Scholar] [CrossRef]
- Qin, C.; Zhang, Z.; Fang, Q. Adaptive Backstepping Fast Terminal Sliding Mode Control With Estimated Inverse Hysteresis Compensation for Piezoelectric Positioning Stages. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 1186–1190. [Google Scholar] [CrossRef]
- Bazaei, A.; Boudaoud, M.; Ettefagh, M.H.; Chen, Z.; Régnier, S. Non-Collocated Displacement Sensing by Semiconductor Strain Gauges in Differentially Piezo-Driven Nanopositioners. IEEE Sens. J. 2021, 21, 9690–9697. [Google Scholar] [CrossRef]
- Li, P.Z.; Zhang, D.F.; Lennox, B.; Arvin, F. A 3-DOF piezoelectric driven nanopositioner: Design, control and experiment. Mech. Syst. Signal Process. 2021, 155, 107603. [Google Scholar] [CrossRef]
- Yin, Z.; Qin, R.; Du, H.; Zhou, W.; Sun, J.; Sun, D.; Liu, Y. Design and Parameter Identification for a Positioning Platform with a Large Stroke and High Precision for Segmented Mirrors. Micromachines 2023, 14, 713. [Google Scholar] [CrossRef]
- Bazaei, A.; Boudaoud, M.; Hemmasian Ettefagh, M.; Chen, Z.; Régnier, S. Displacement Sensing by Piezoelectric Transducers in High-Speed Lateral Nanopositioning. IEEE Sens. J. 2019, 19, 9156–9165. [Google Scholar] [CrossRef]
- Jin, T.; Luo, S.; Le, Y.; Wu, J.; Lei, L.; Zhang, B. Design and analysis of a low crosstalk error nested structure two-dimensional micro-displacement stage. Adv. Mech. Eng. 2021, 13, 16878140211014061. [Google Scholar] [CrossRef]
- Reverter, F. A Tutorial on Mechanical Sensors in the 70th Anniversary of the Piezoresistive Effect. Sensors 2024, 24, 3690. [Google Scholar] [CrossRef]
- Mitura, A.; Brunetti, M.; Kloda, L.; Romeo, F.; Warminski, J. Experimental nonlinear dynamic regimes for energy harvesting from cantilever bistable shells. Mech. Syst. Signal Process. 2024, 206, 110890. [Google Scholar] [CrossRef]
- Ajnada, T.; Bernard, Y.; Daniel, L. Snap-through of a bistable beam using piezoelectric actuation. J. Intell. Mater. Syst. Struct. 2024, 35, 1137–1148. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, L.W.; Xu, Z.D. Snap-through behavior of bistable beam with variable sections: Mechanical model and experimental study. Smart Mater. Struct. 2022, 31, 105004. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| m | 0.05 kg |
| b | 0.001 Ns/m |
| k | 24.67 N/m |
| d | 24.685 N/V |
| Parameter | SMC | ASMC |
|---|---|---|
| c | 48 | 48 |
| p | 10 | 10 |
| 0.1 | 0.1 | |
| Δ | 1 | 1 |
| - | 0.1 |
| Errors | SMC | ASMC | |
|---|---|---|---|
| (m) | 0.005 Hz | 0.4750 | 0.3822 |
| 0.010 Hz | 0.5260 | 0.3596 | |
| (m) | 0.005 Hz | 0.2337 | 0.1854 |
| 0.010 Hz | 0.2491 | 0.1967 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Nan, F.; Li, T.; Mo, C.; Su, J.; Wei, K.; Zhang, X. Integrating Strain Gauge Feedback with Adaptive Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage. Actuators 2025, 14, 79. https://doi.org/10.3390/act14020079
Zeng X, Nan F, Li T, Mo C, Su J, Wei K, Zhang X. Integrating Strain Gauge Feedback with Adaptive Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage. Actuators. 2025; 14(2):79. https://doi.org/10.3390/act14020079
Chicago/Turabian StyleZeng, Xianfeng, Feng Nan, Tengfei Li, Changchao Mo, Jiaqiu Su, Kaihong Wei, and Xiaozhi Zhang. 2025. "Integrating Strain Gauge Feedback with Adaptive Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage" Actuators 14, no. 2: 79. https://doi.org/10.3390/act14020079
APA StyleZeng, X., Nan, F., Li, T., Mo, C., Su, J., Wei, K., & Zhang, X. (2025). Integrating Strain Gauge Feedback with Adaptive Sliding Mode Motion Control for Piezoelectric Nanopositioning Stage. Actuators, 14(2), 79. https://doi.org/10.3390/act14020079